摘要:
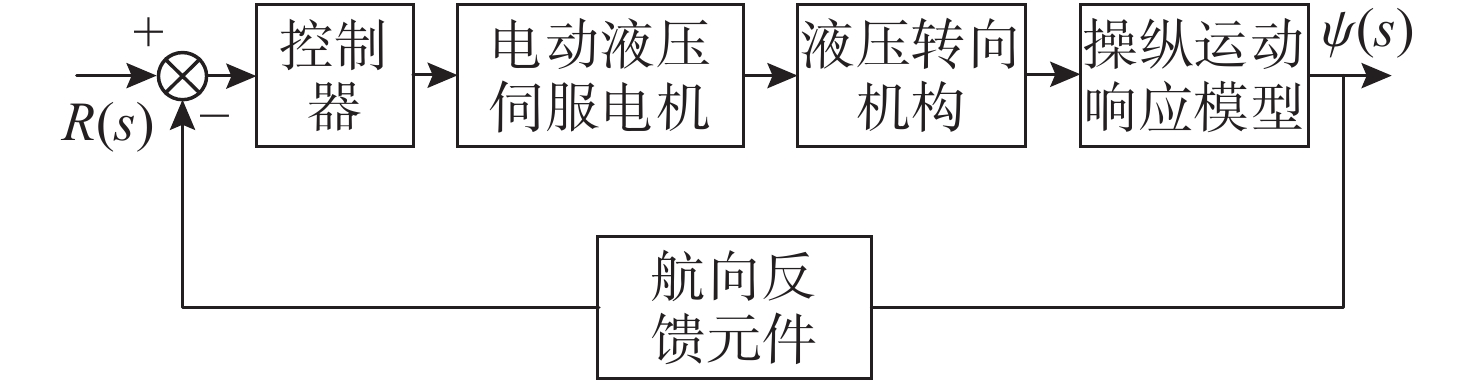
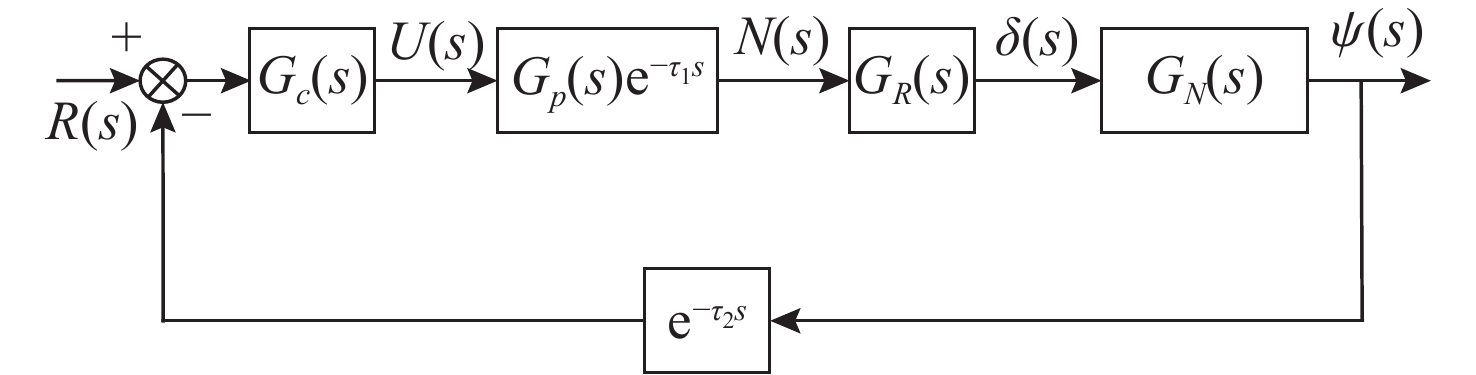
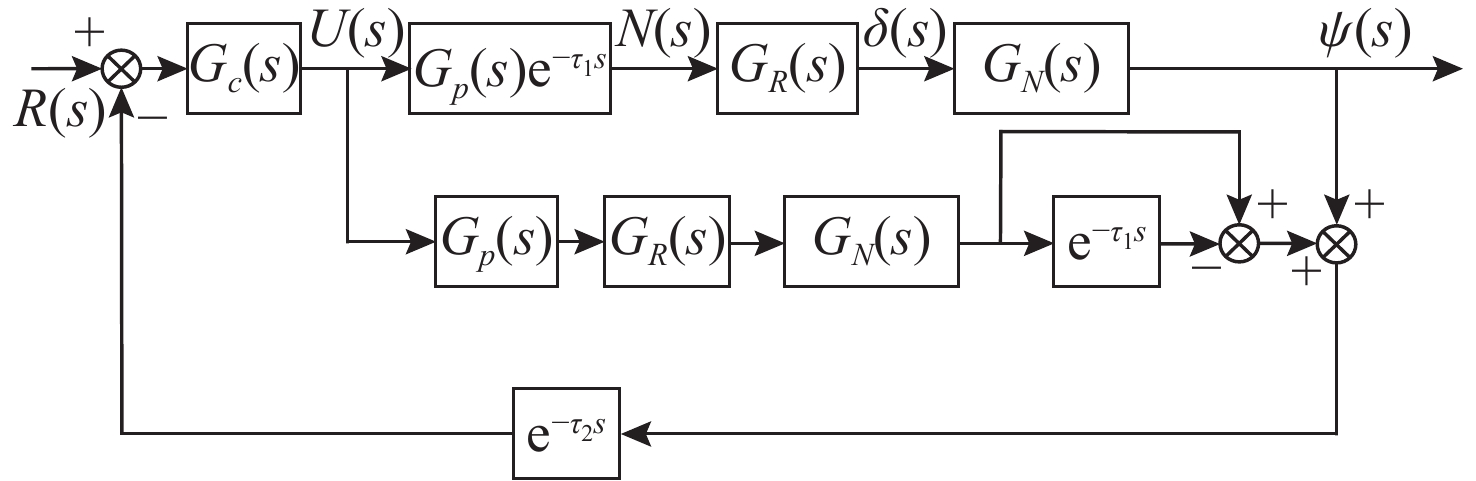
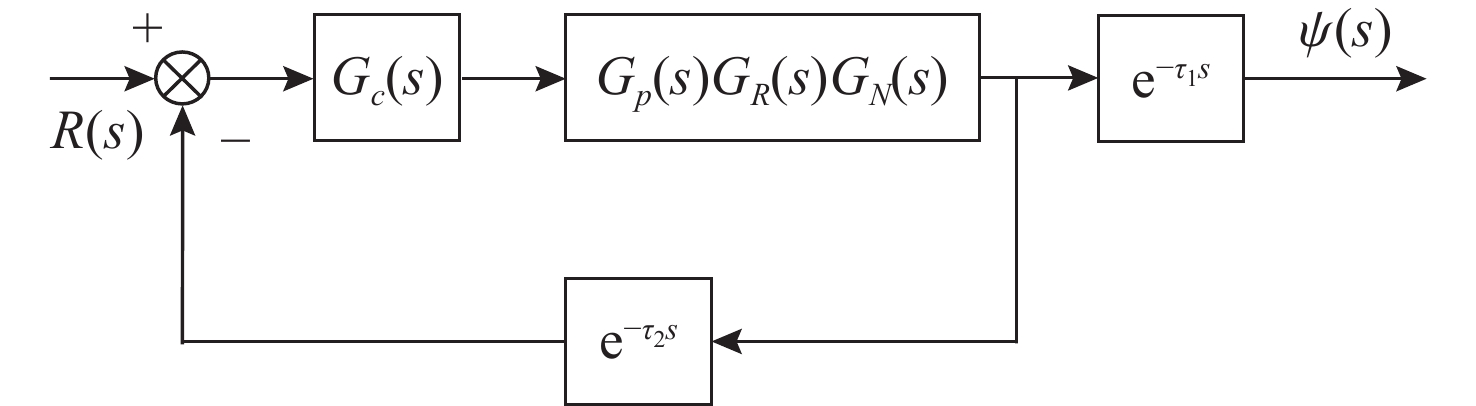
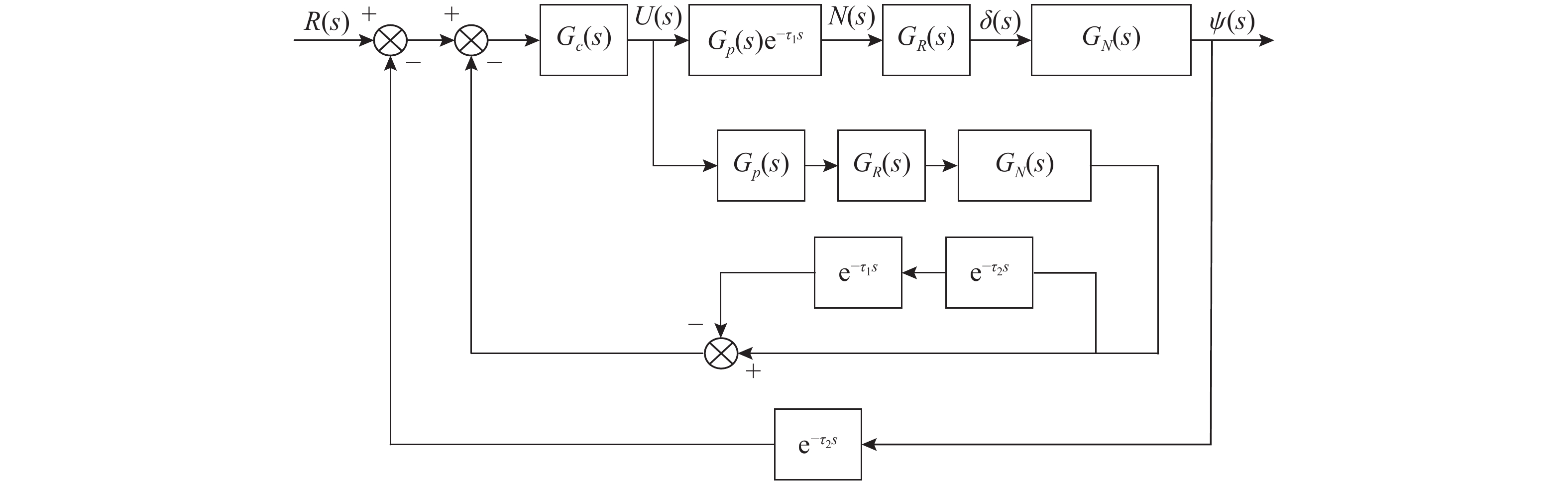
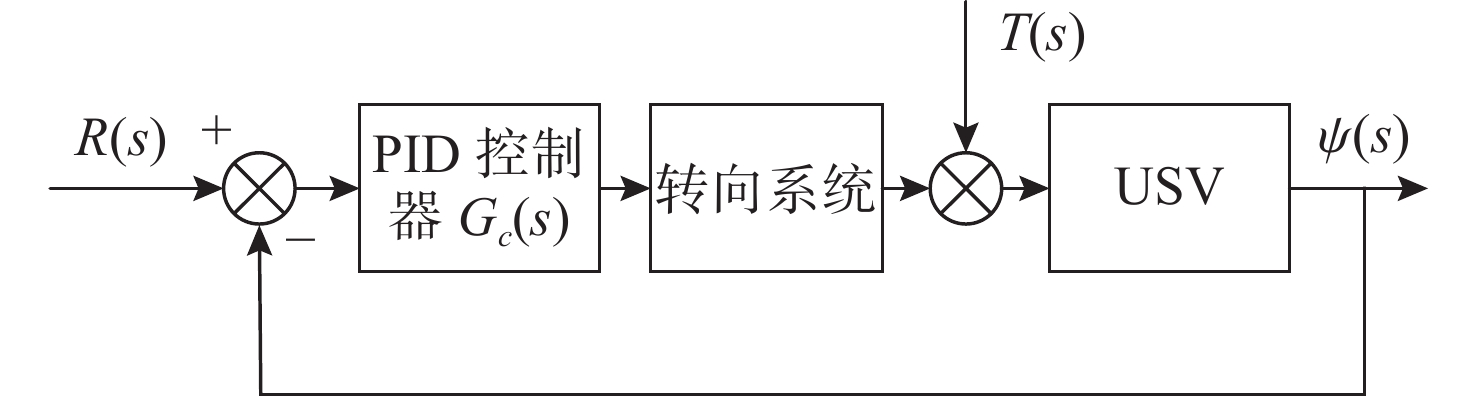
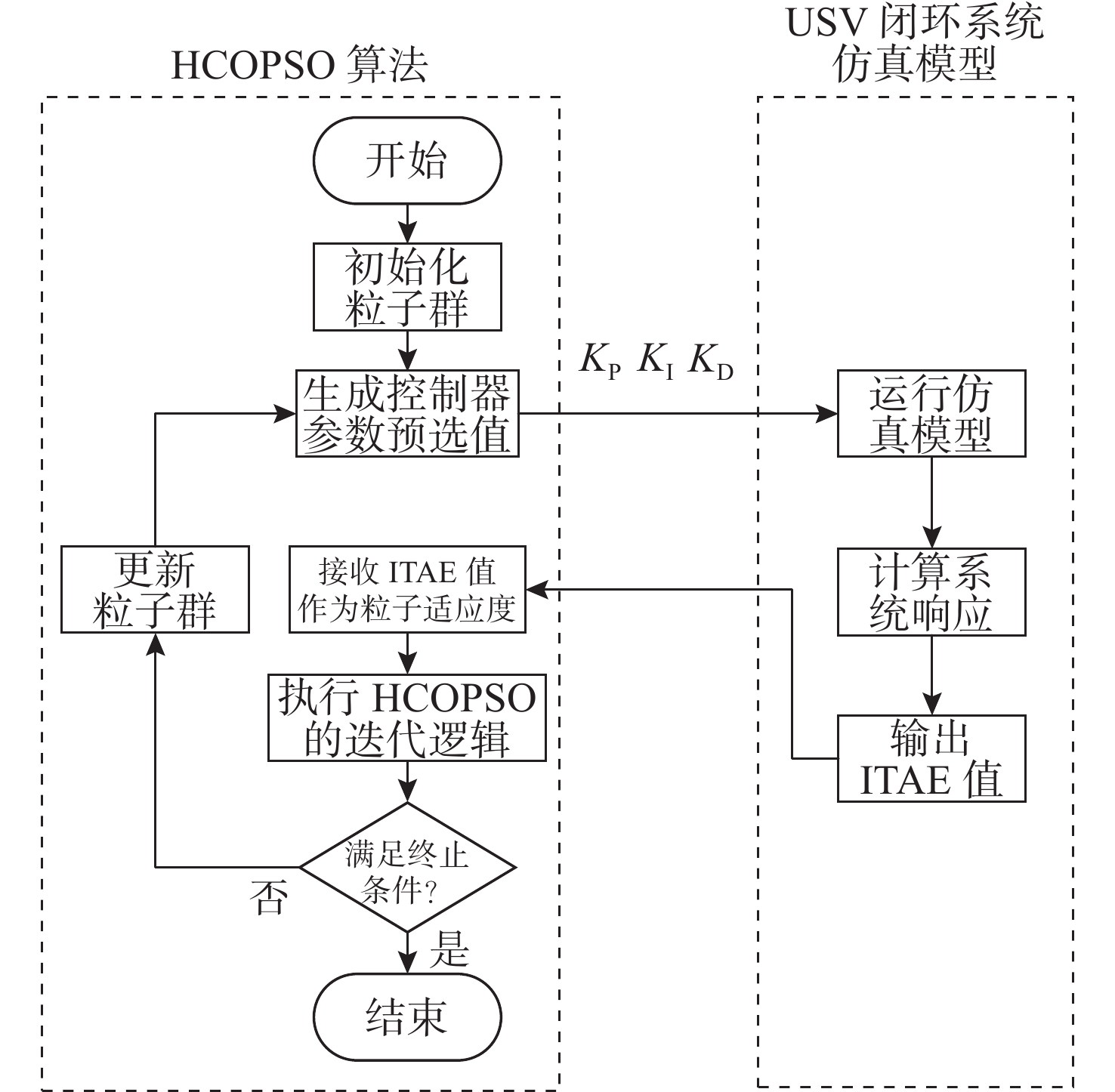
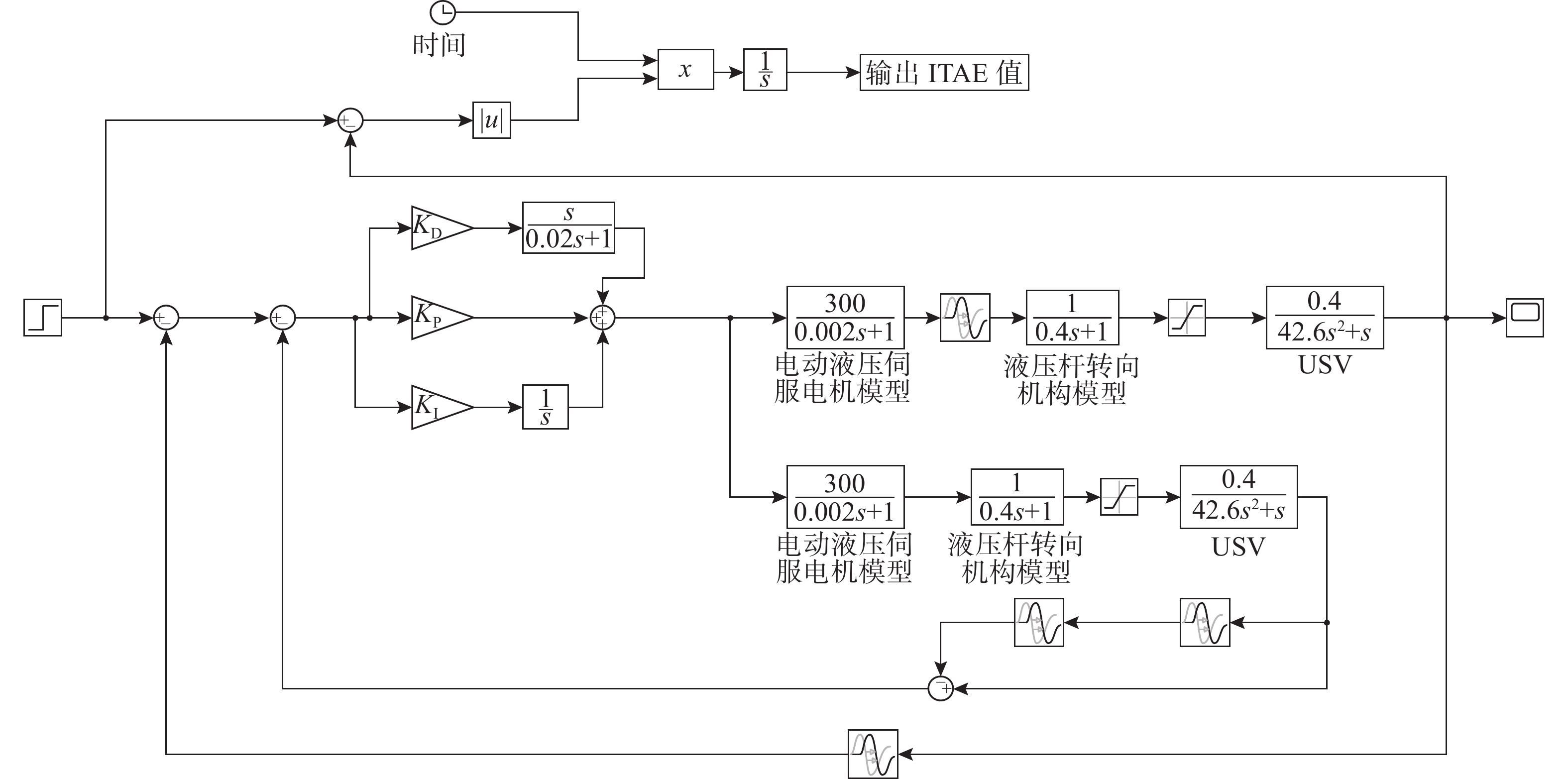
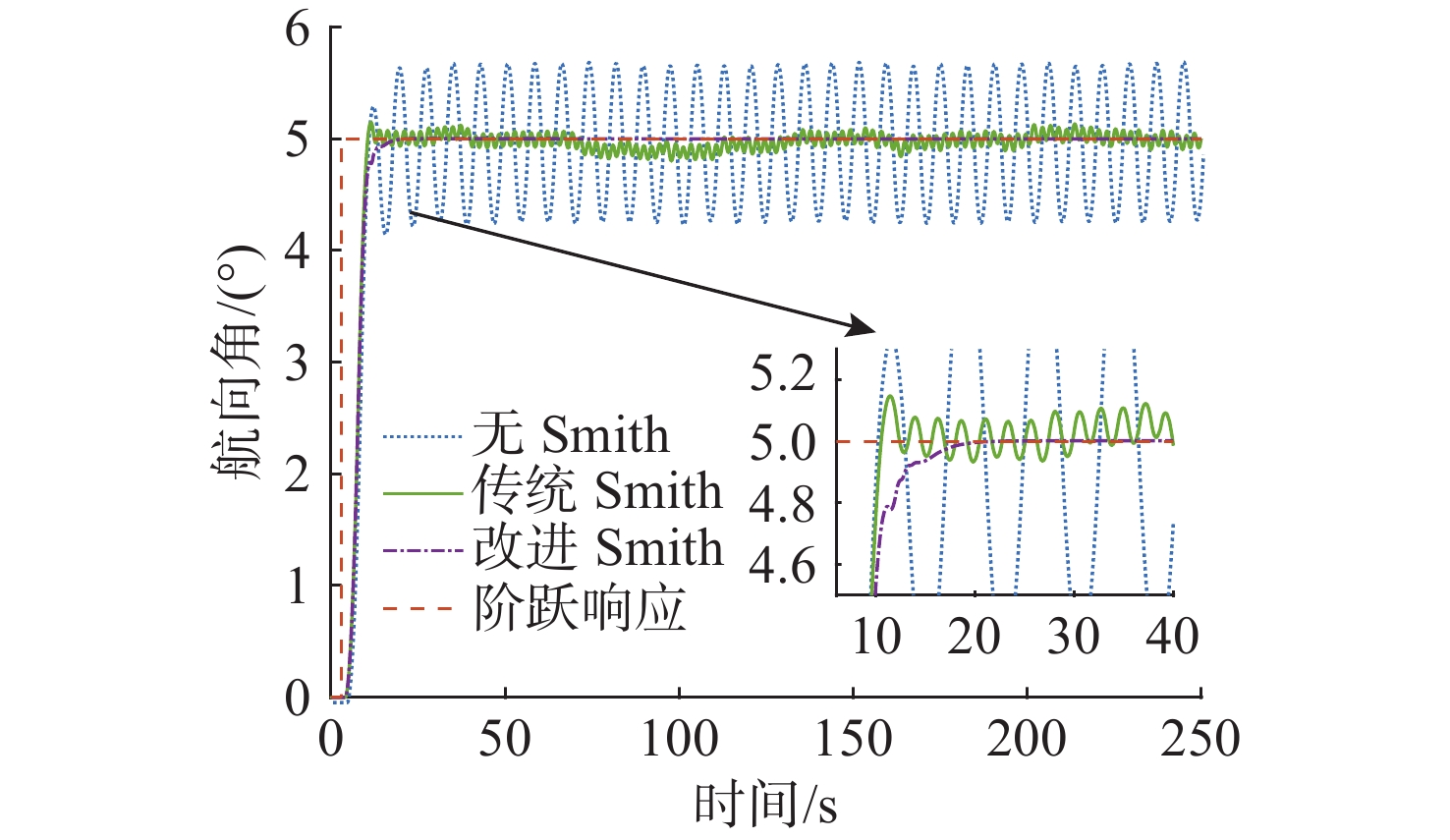
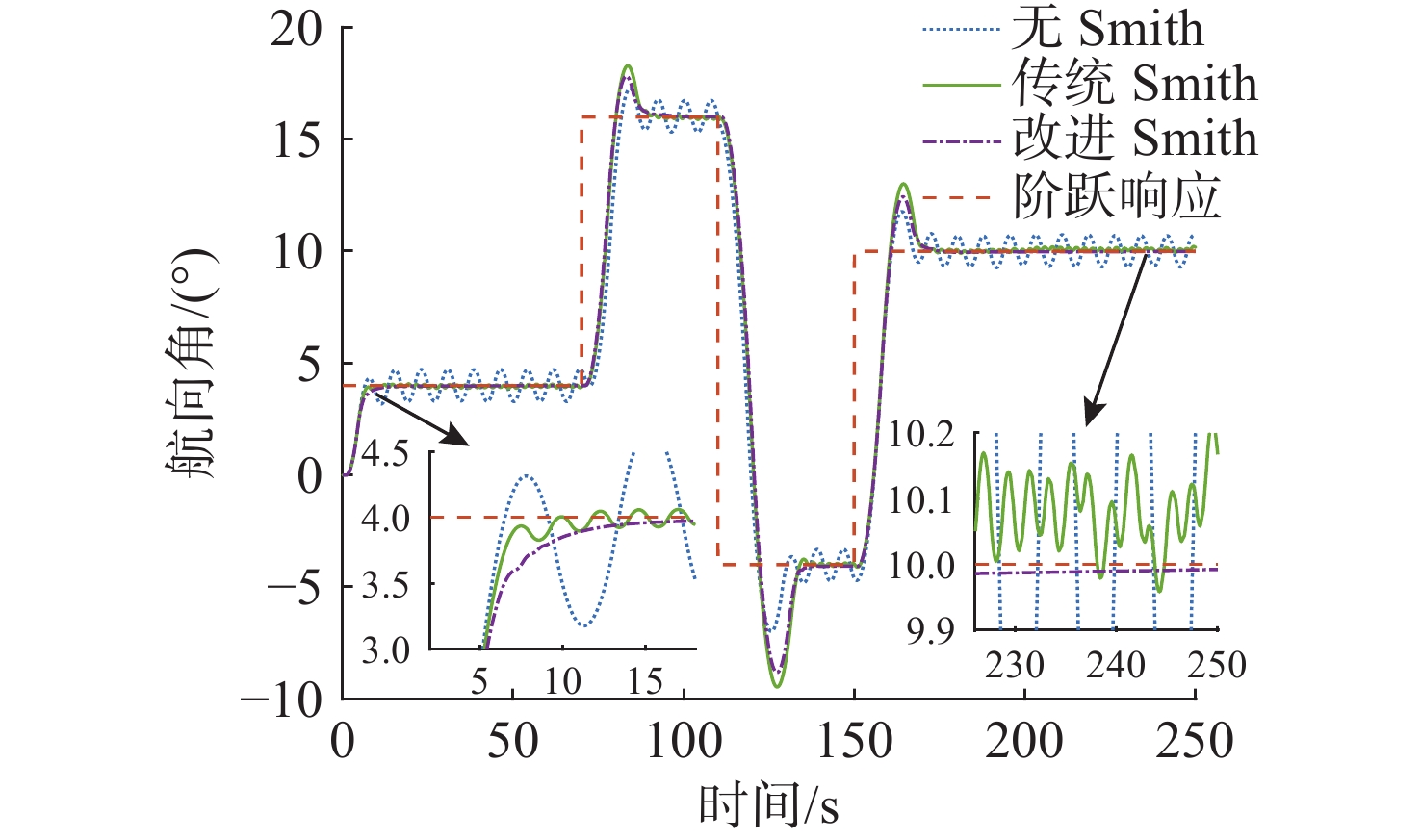
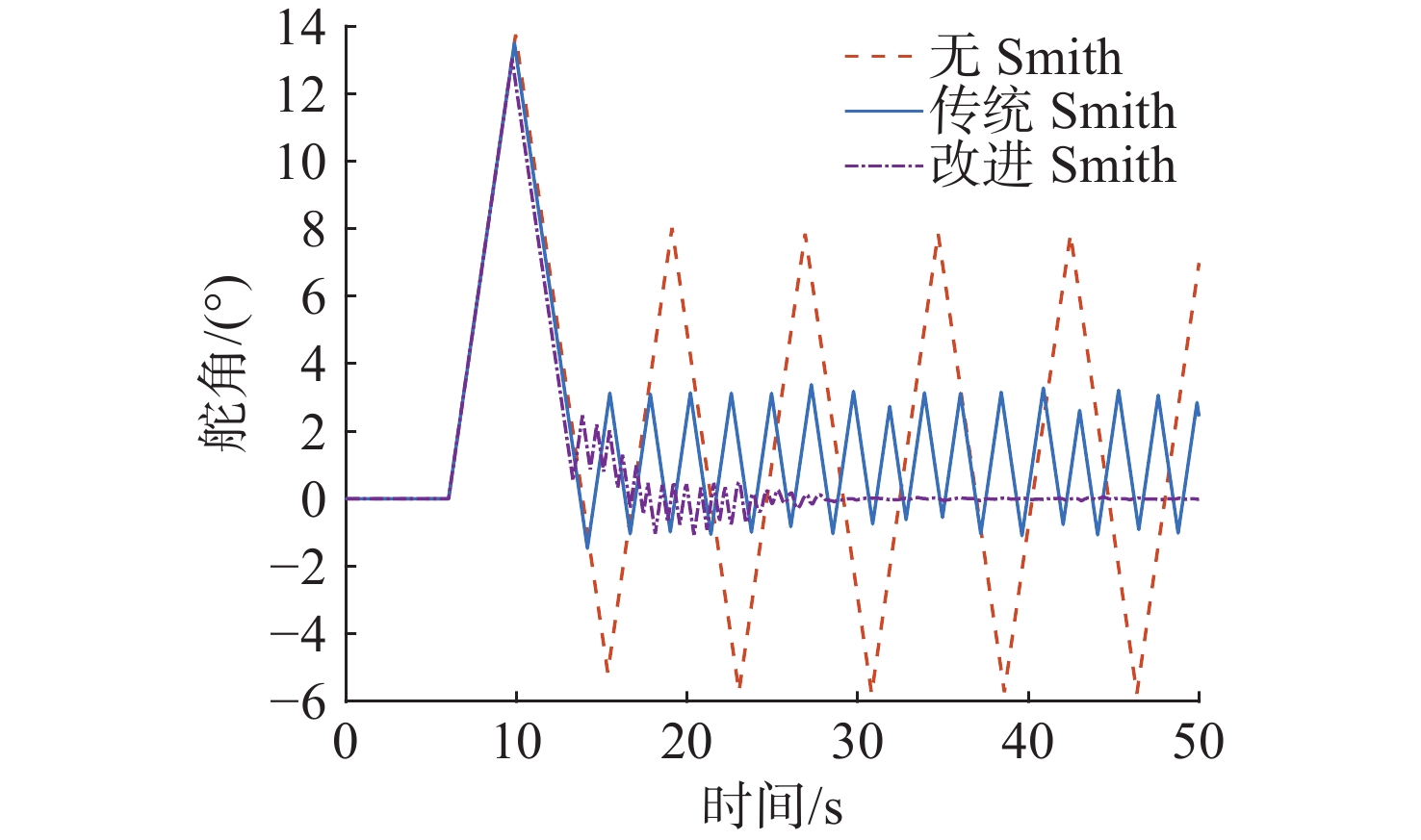
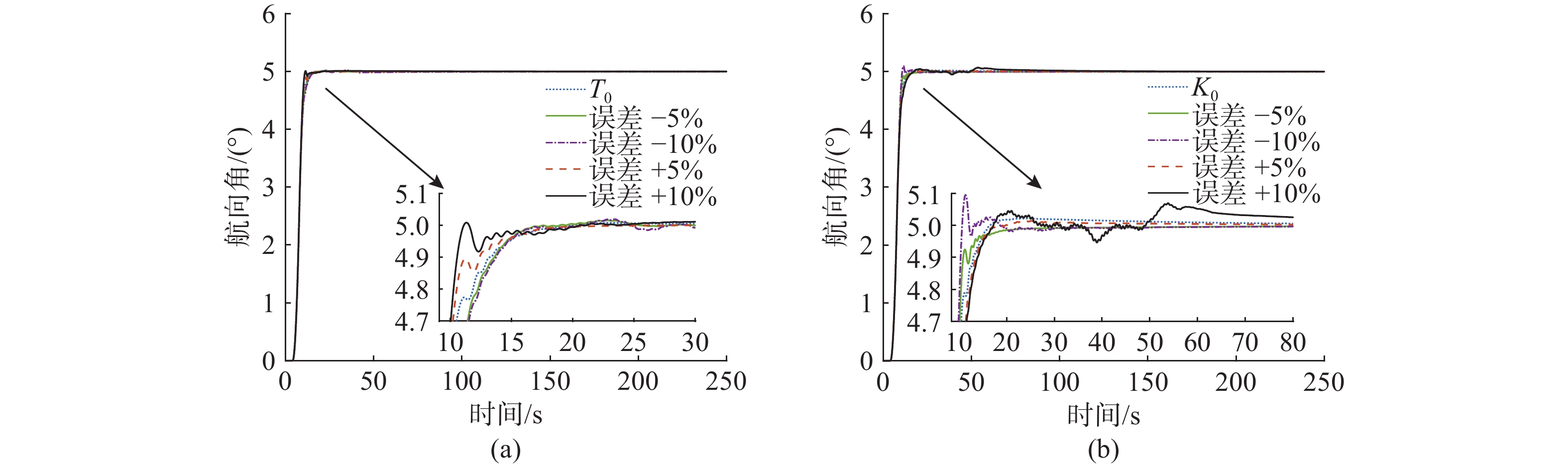
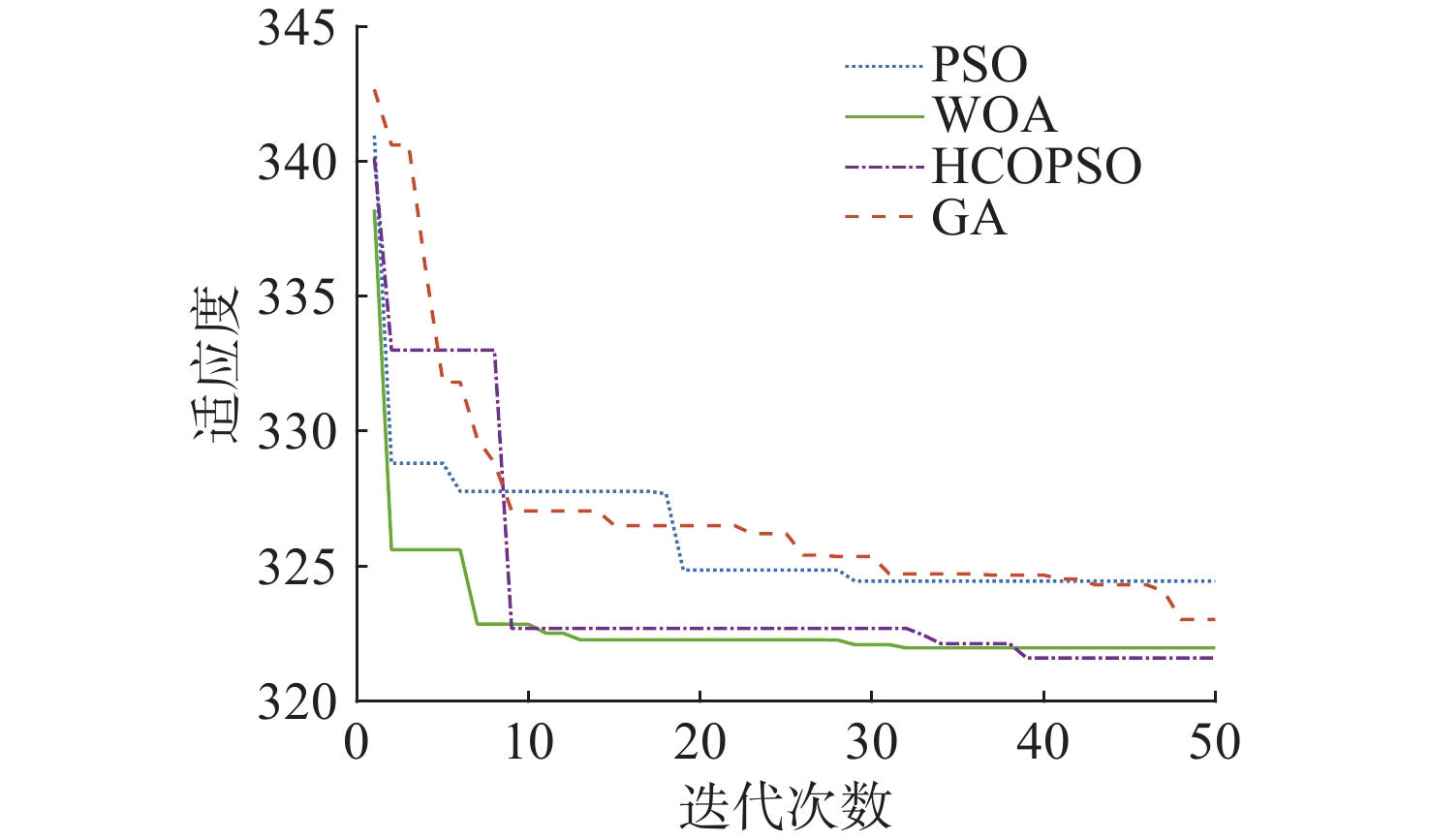
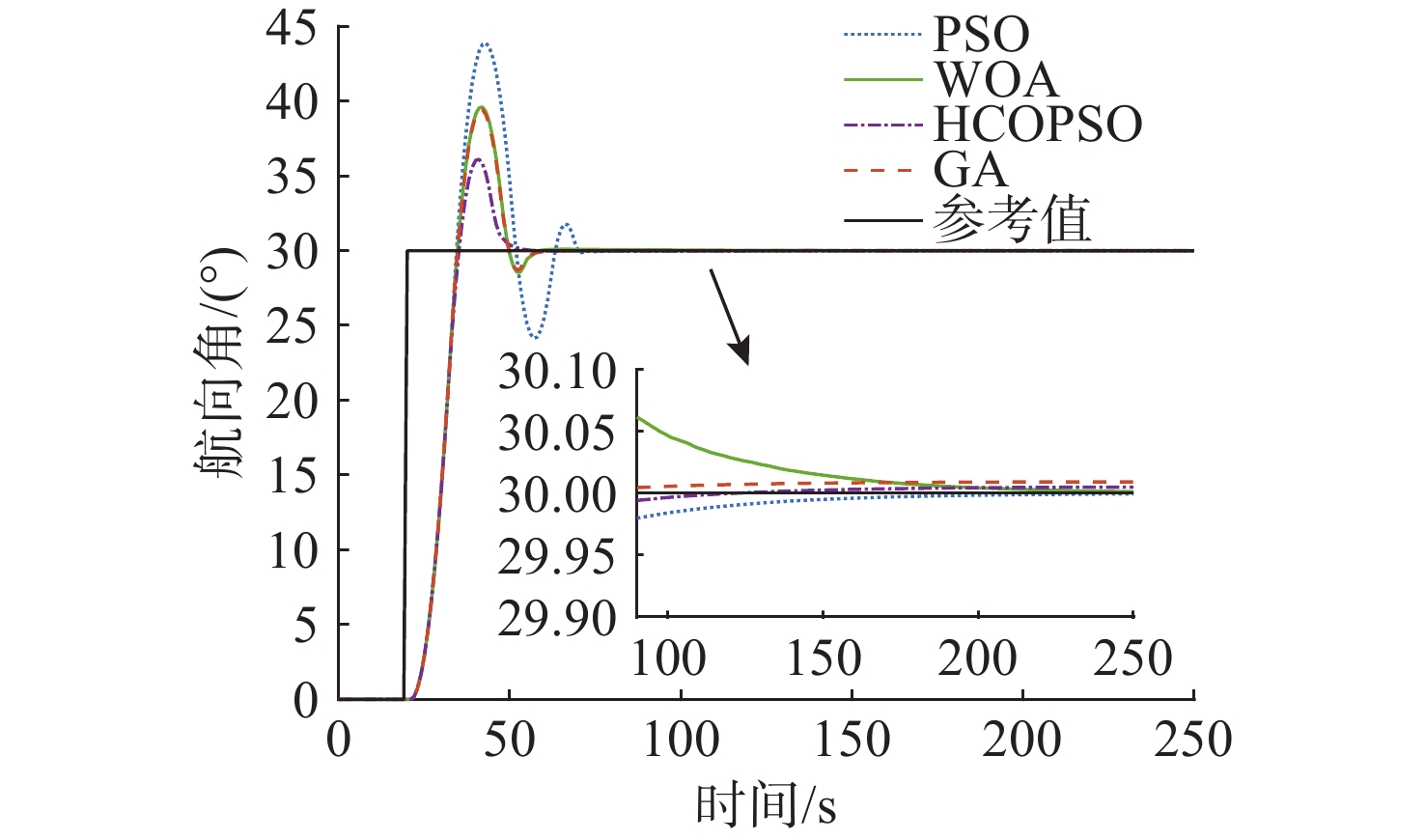
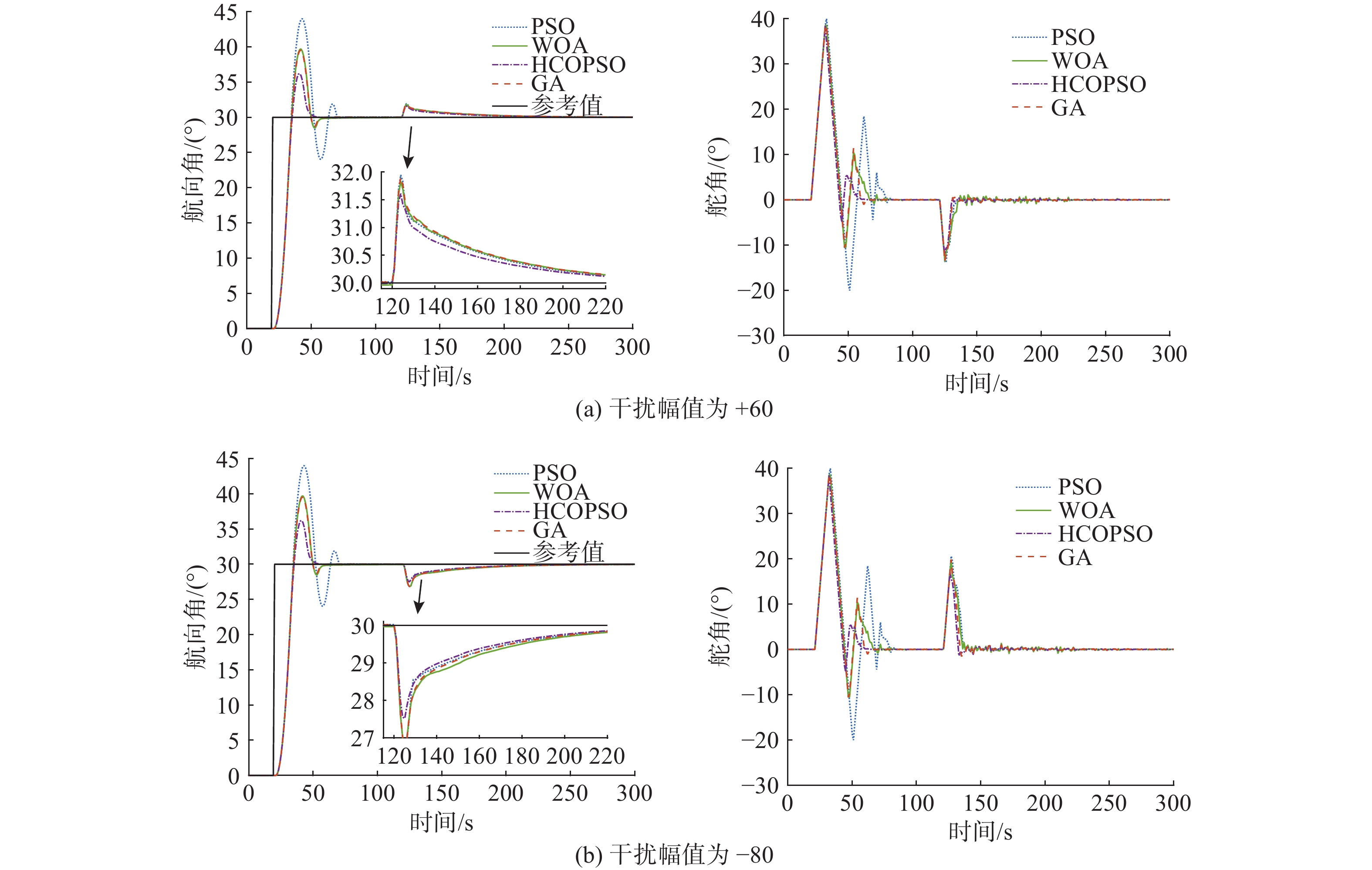
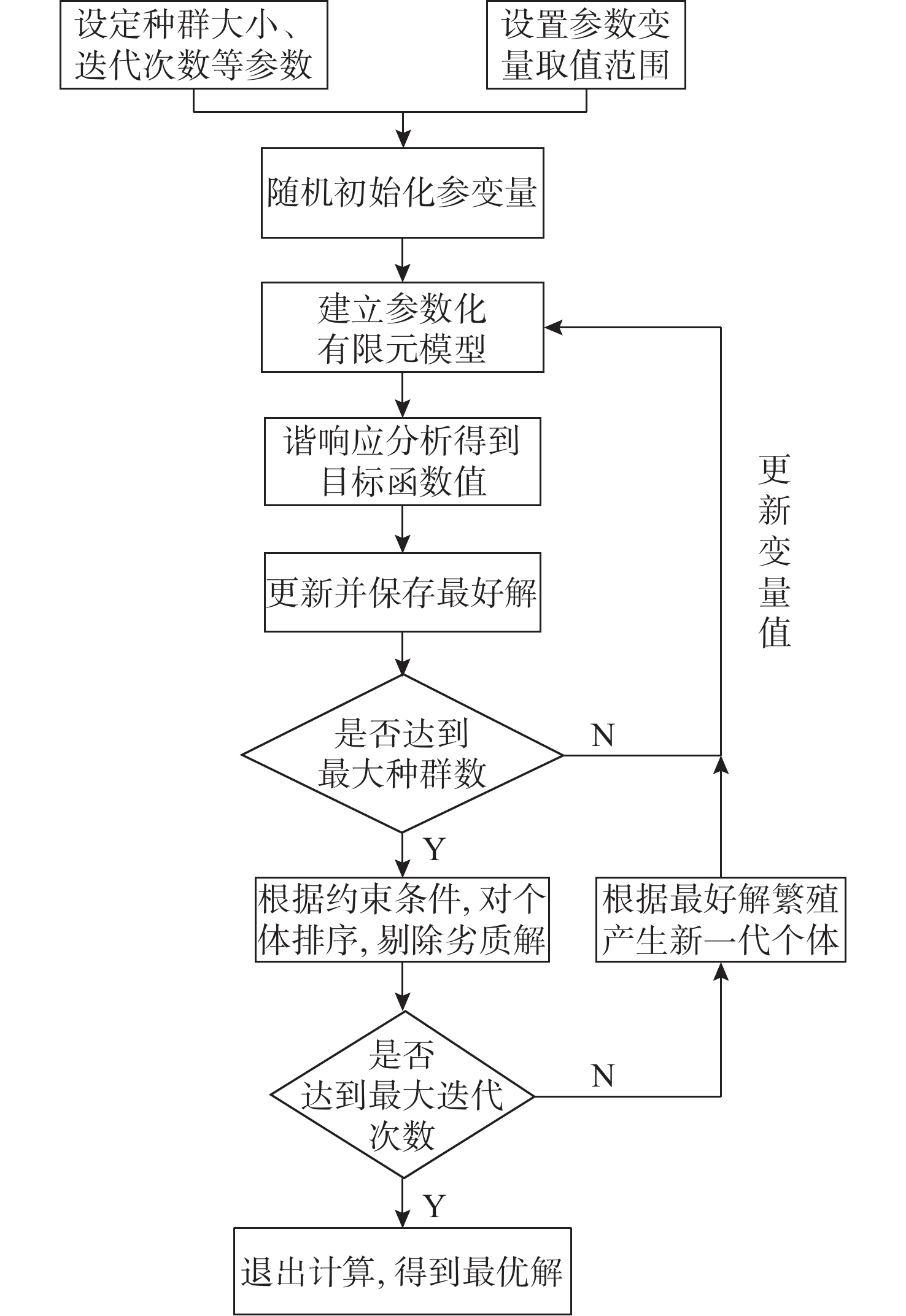
高速无人艇(USV)航向控制中, 同时存在前向通道与反馈回路的时滞环节, 并且具有较大的延迟/动态时间比, 显著降低航向控制性能。传统Smith预估器虽能有效补偿前向通道时滞, 但未考虑反馈回路的时滞。为此, 文中将反馈回路时滞纳入Smith预估器设计, 构建包含双向时滞的预测模型, 同时补偿前向通道与反馈回路的时滞, 减少双向时滞的系统相位裕度侵蚀。进一步, 引入混合均值中心反向学习粒子群优化(HCOPSO)算法进行比例-积分-微分(PID)控制器参数寻优整定, 该算法在迭代前期利用均值中心反向学习策略扩大搜索范围, 后期通过自适应压缩因子实现精细寻优, 兼具全局探索与局部开发的优势, 有效解决寻优过程的局部最优解问题。基于USV航向模型进行了仿真测试, 结果表明, 改进Smith预估PID控制器相较于常规PID控制器、传统Smith预估PID控制器, 系统的超调量和调节时间均得到了改善, 稳态误差小于0.1°; 并且当改进Smith预估补偿模型存在误差时, 系统依然能够保持良好的动态性能与稳态精度。同时, 针对改进Smith预估PID控制器, 进一步对比分析了HCOPSO算法与粒子群优化(PSO)算法、遗传算法(GA)和鲸鱼优化算法(WOA)的航向控制性能。结果表明, HCOPSO算法获得的时间加权绝对误差积分(ITAE)指标较PSO、GA和WOA算法分别降低了55.38%、22.47%和24.63%, 并表现出较强的扰动抑制能力与航向保持能力, 验证了其有效性。
李至琦, 刘兰军, 陈家林. 改进Smith预估器结合HCOPSO算法的无人艇航向控制[J]. 水下无人系统学报, 2026, 34(1): 136-147. doi: 10.11993/j.issn.2096-3920.2025-0104.