Multi-Objective Collaborative Path Planning for USV-AUV Based on USBL
-
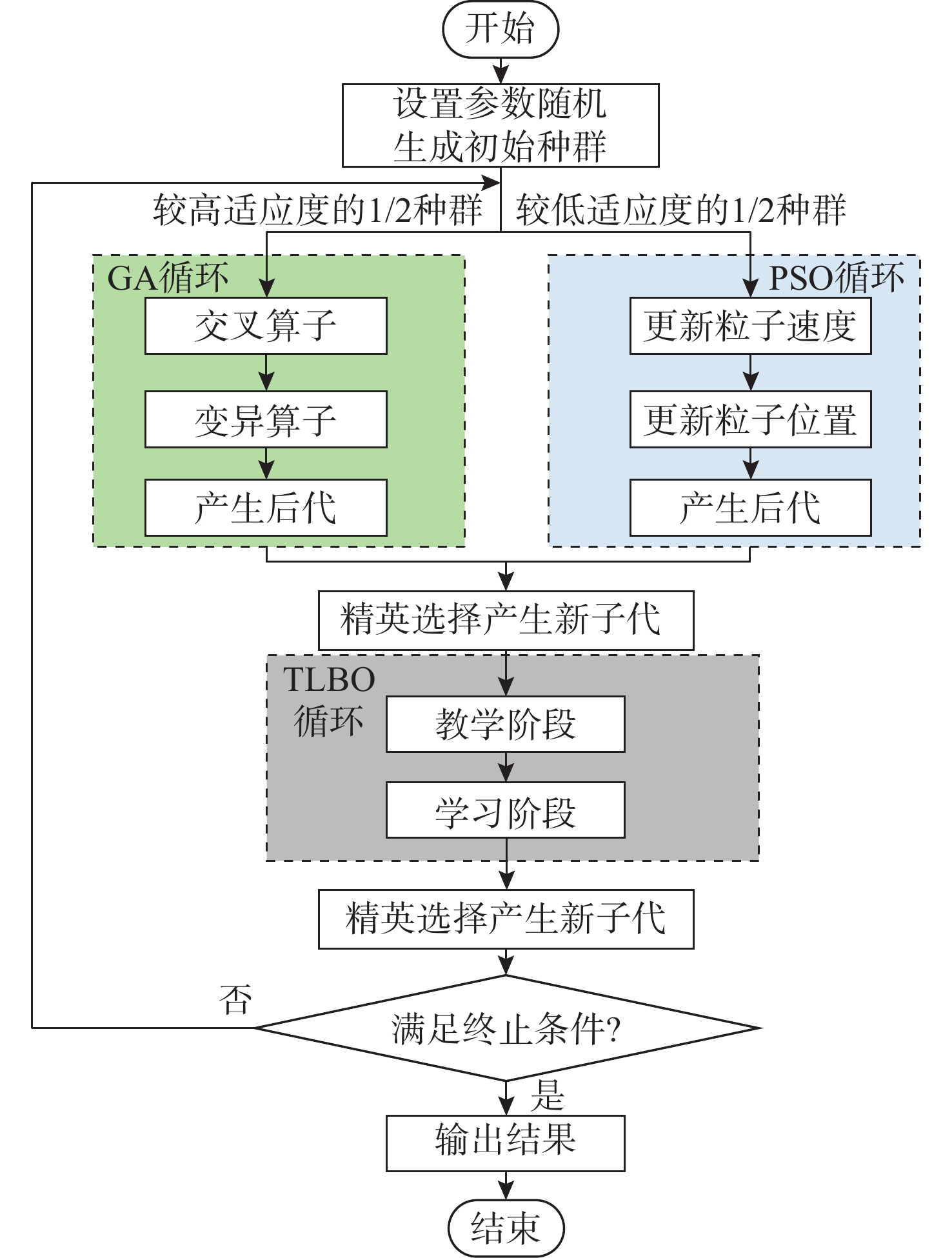
摘要: 面向无人水面艇(USV)辅助多自主水下航行器(AUV)作业应用背景, 针对水下通信易受干扰、有效距离有限及协同稳定性不足等问题, 提出一种基于超短基线 (USBL)定位系统的USV-AUV多目标协同路径规划方法。通过分析USBL工作原理与海洋水声信号传播特性, 融合USBL信号有效区、射线声学理论定义的声线传播边界及声呐方程计算的最大作用距离, 共同构建协同作业的稳定通信范围。在确保USV与AUV处于水声通信有效范围的前提下, 进一步优化路径长度、路径平滑度和USV-AUV的通信性能, 建立了USV-AUV协同路径规划的多目标优化模型, 采用融合遗传算法(GA)、粒子群优化(PSO)和教学优化(TLBO)算法的协同优化策略求解。仿真实验探究了通信距离、AUV作业深度等参数对USV规划路径影响, 结果表明, 所提方法在满足USBL通信约束的同时, 能够有效提升USV与AUV协同工作的稳定性和效率, 为多AUV执行复杂海洋任务提供可靠保障。Abstract: To address the problems of high susceptibility to interference, limited effective range, and insufficient collaborative stability in underwater communication within the context of unmanned surface vehicle (USV)-assisted multi-autonomous undersea vehicle(AUV) operations, this paper proposed a multi-objective collaborative path planning method for USV-AUV based on an ultra-short baseline(USBL) positioning system. By analyzing the working principle of USBL and the propagation characteristics of marine underwater acoustic signals, this paper constructed a stable communication range for collaborative operations by integrating the effective zone of USBL signals, the acoustic ray propagation boundary defined by ray acoustics theory, and the maximum operating distance calculated by the sonar equation. With the prerequisite of ensuring that the USV and AUVs are within the effective range of underwater acoustic communication, the paper established a multi-objective optimization model for USV-AUV collaborative path planning to further optimize path length, path smoothness, and USV-AUV communication performance. An improved collaborative optimization strategy that integrates the genetic algorithm(GA), particle swarm optimization(PSO) and teaching-learning-based optimization(TLBO) algorithm was employed for solution. Simulation experiments investigate the influence of parameters, such as communication distance and AUV operating depth, on the USV planned path. The results indicate that the proposed method can effectively enhance the stability and efficiency of collaborative operations between the USV and AUVs while satisfying USBL communication constraints, providing reliable support for multiple AUVs in executing complex marine missions.
-
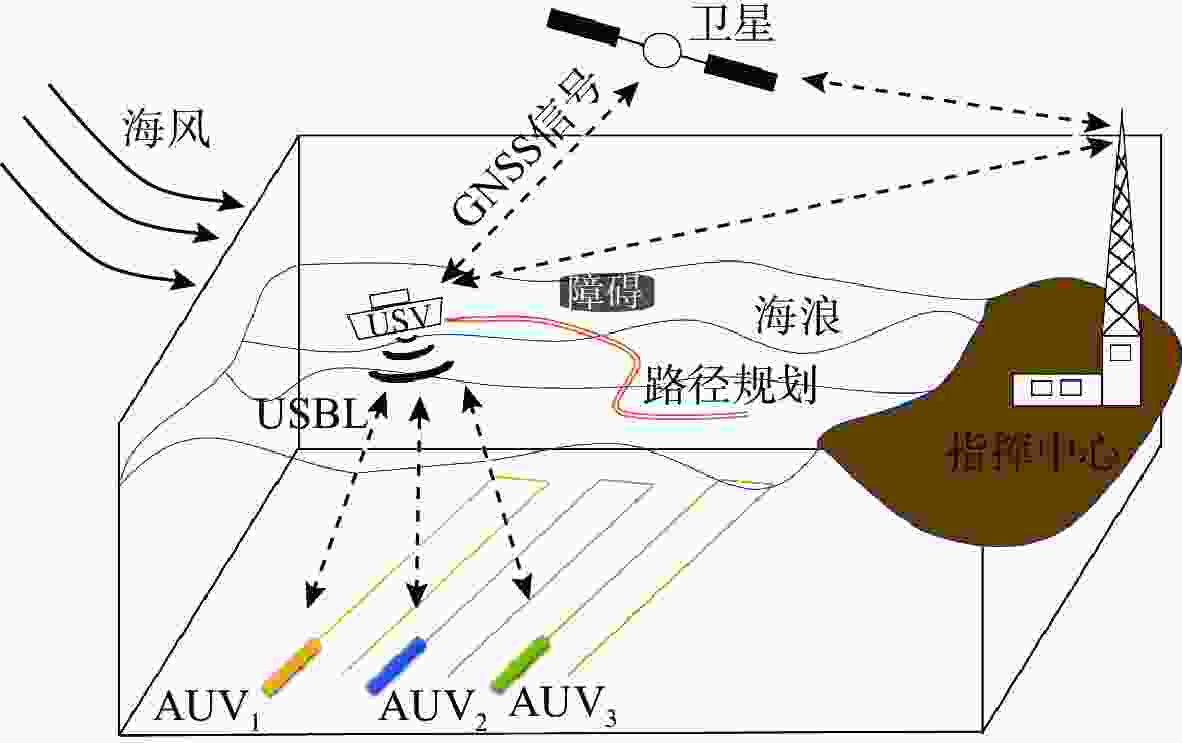
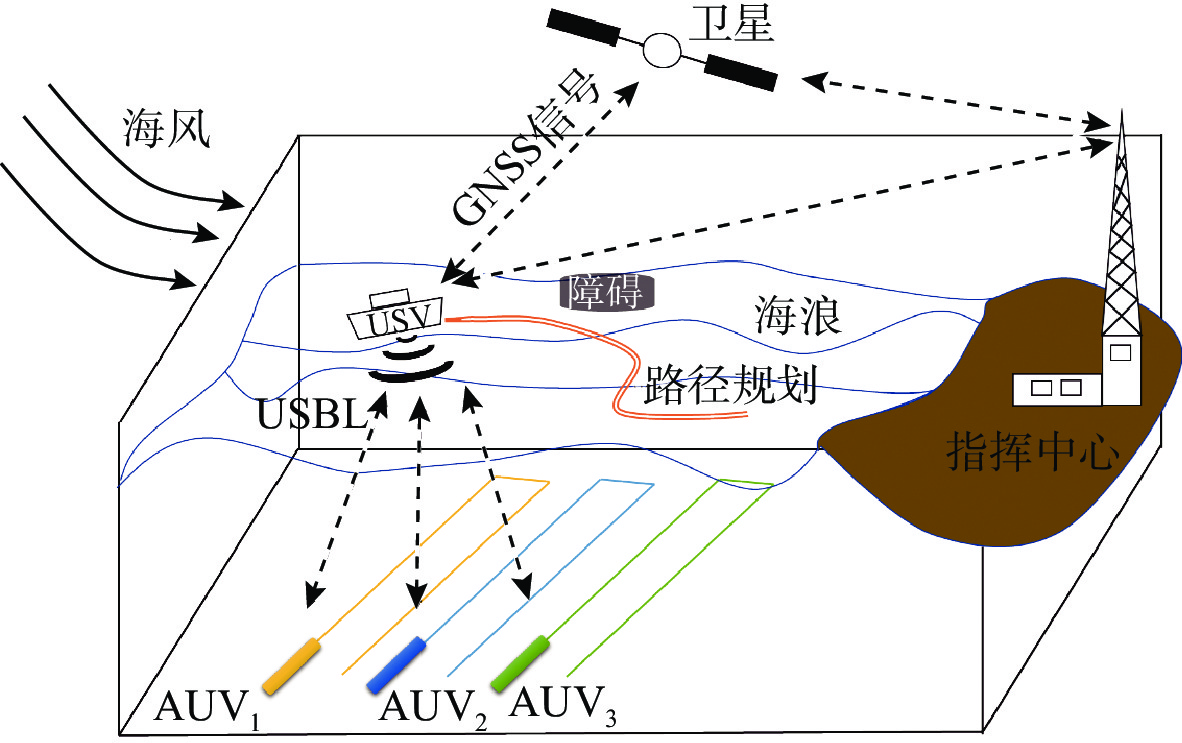
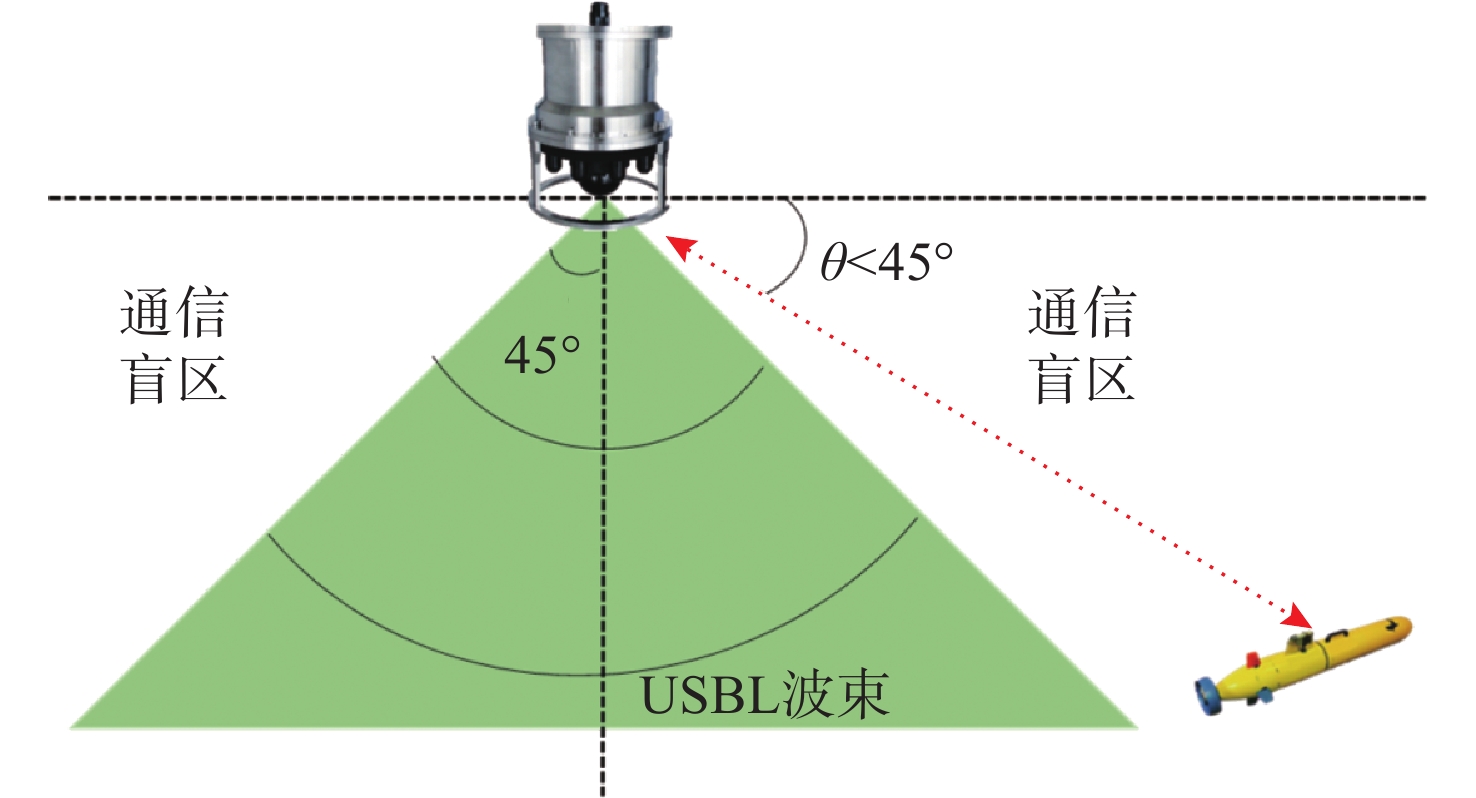
图 1 USV辅助多AUV工作场景示意图
Figure 1. Schematic diagram of USV assisting multi-AUV operation scenario
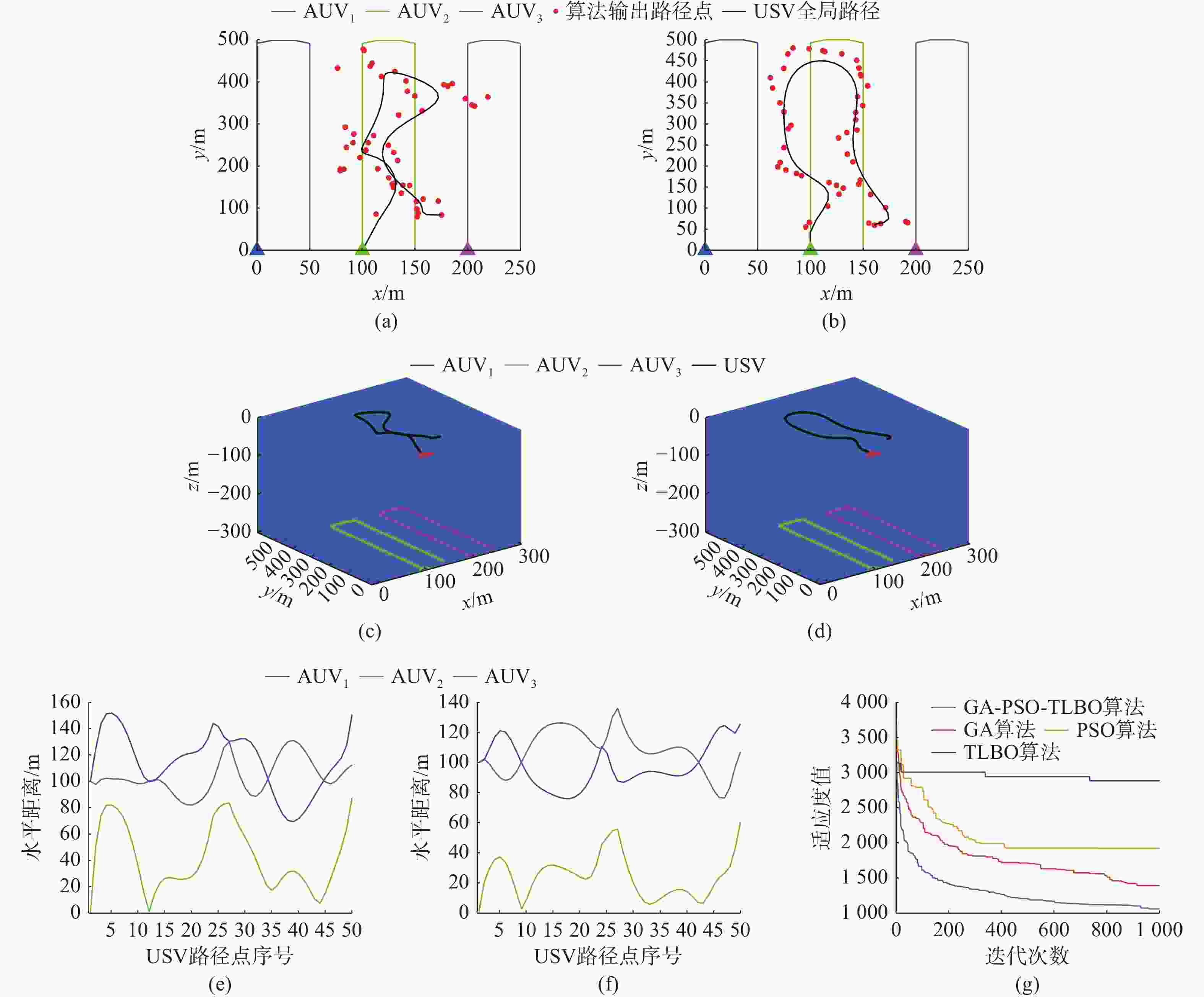
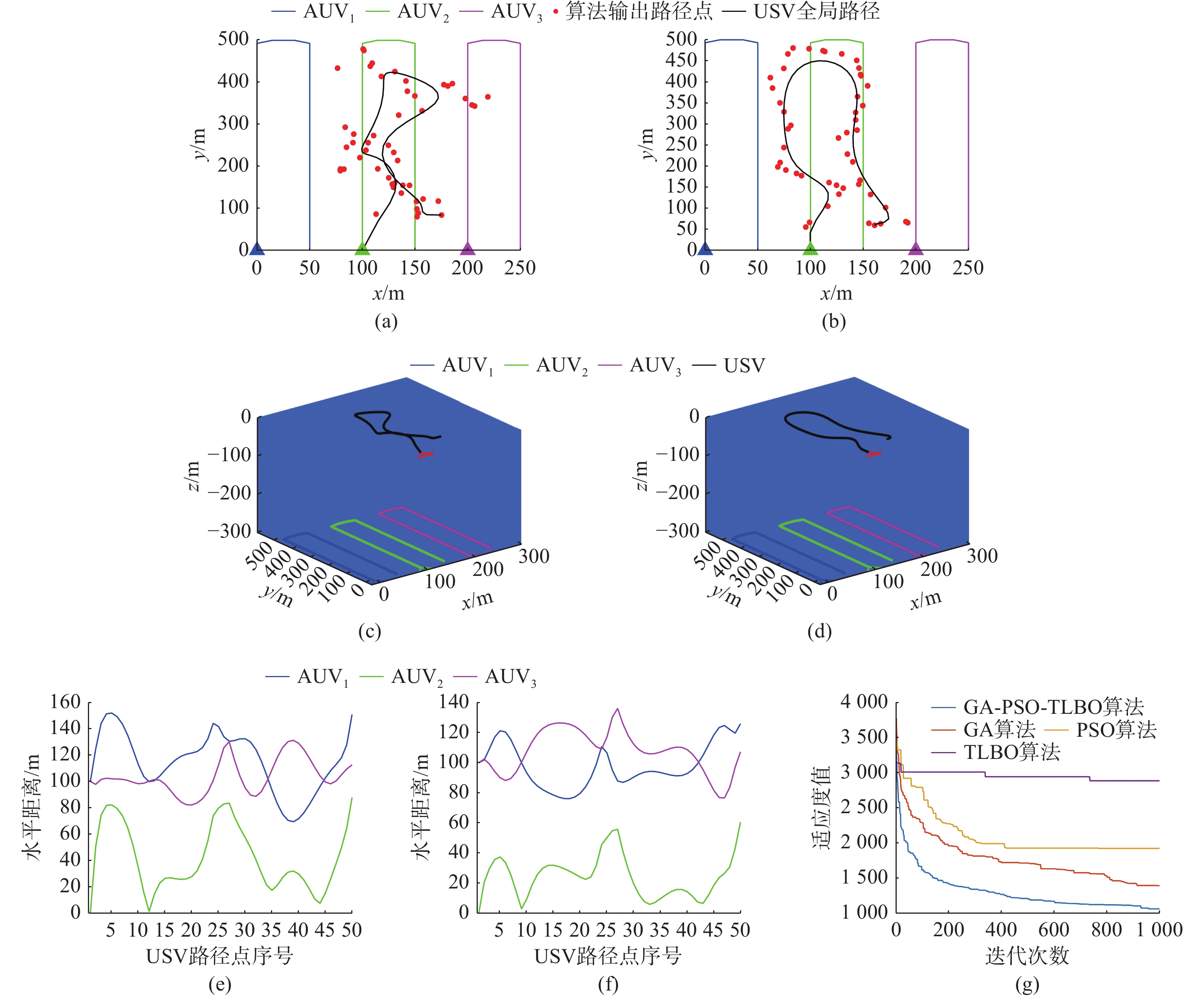
图 6 不同算法在仿真场景1中的规划结果
Figure 6. Planning results of different algorithms in simulation scenario 1
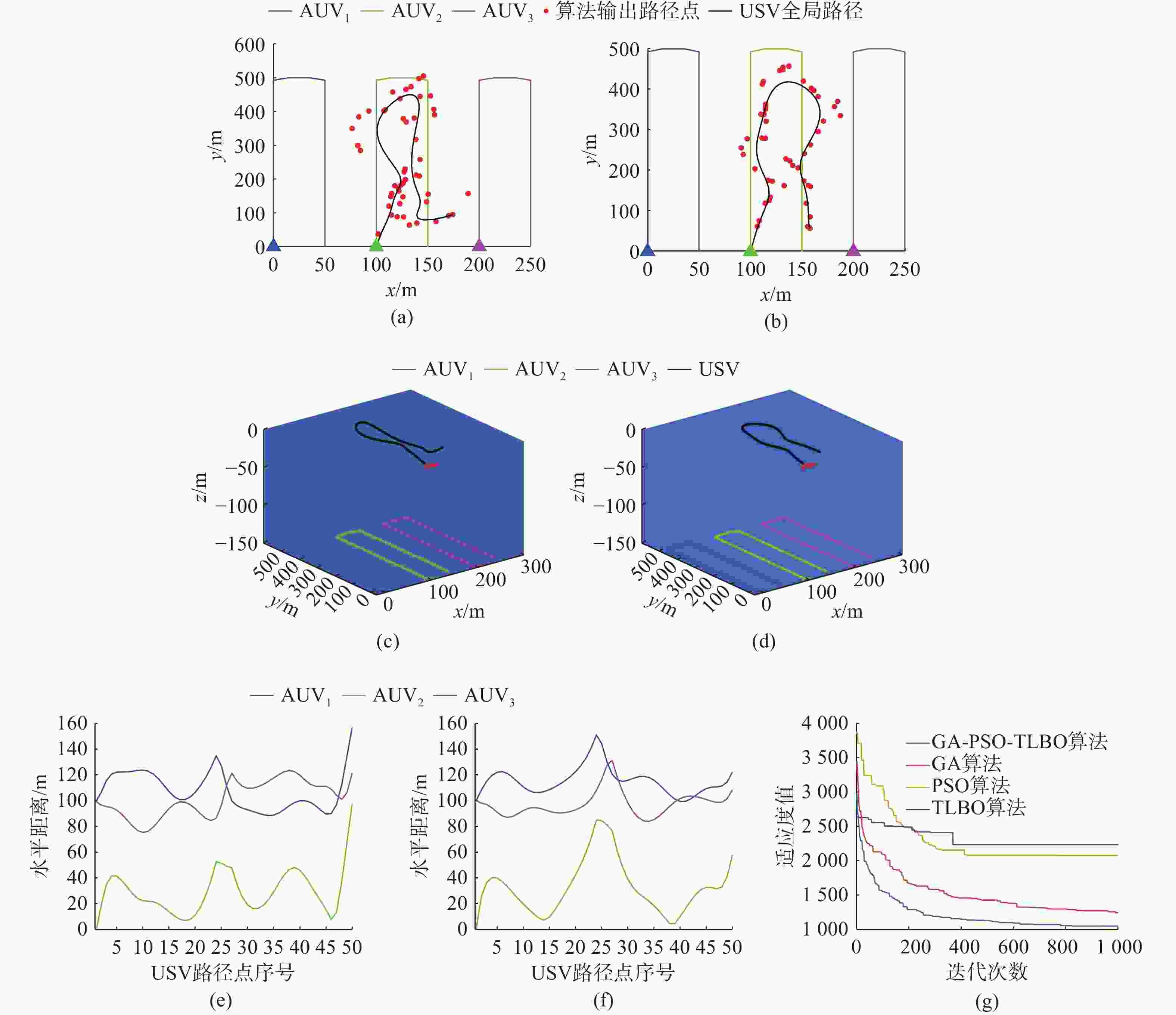
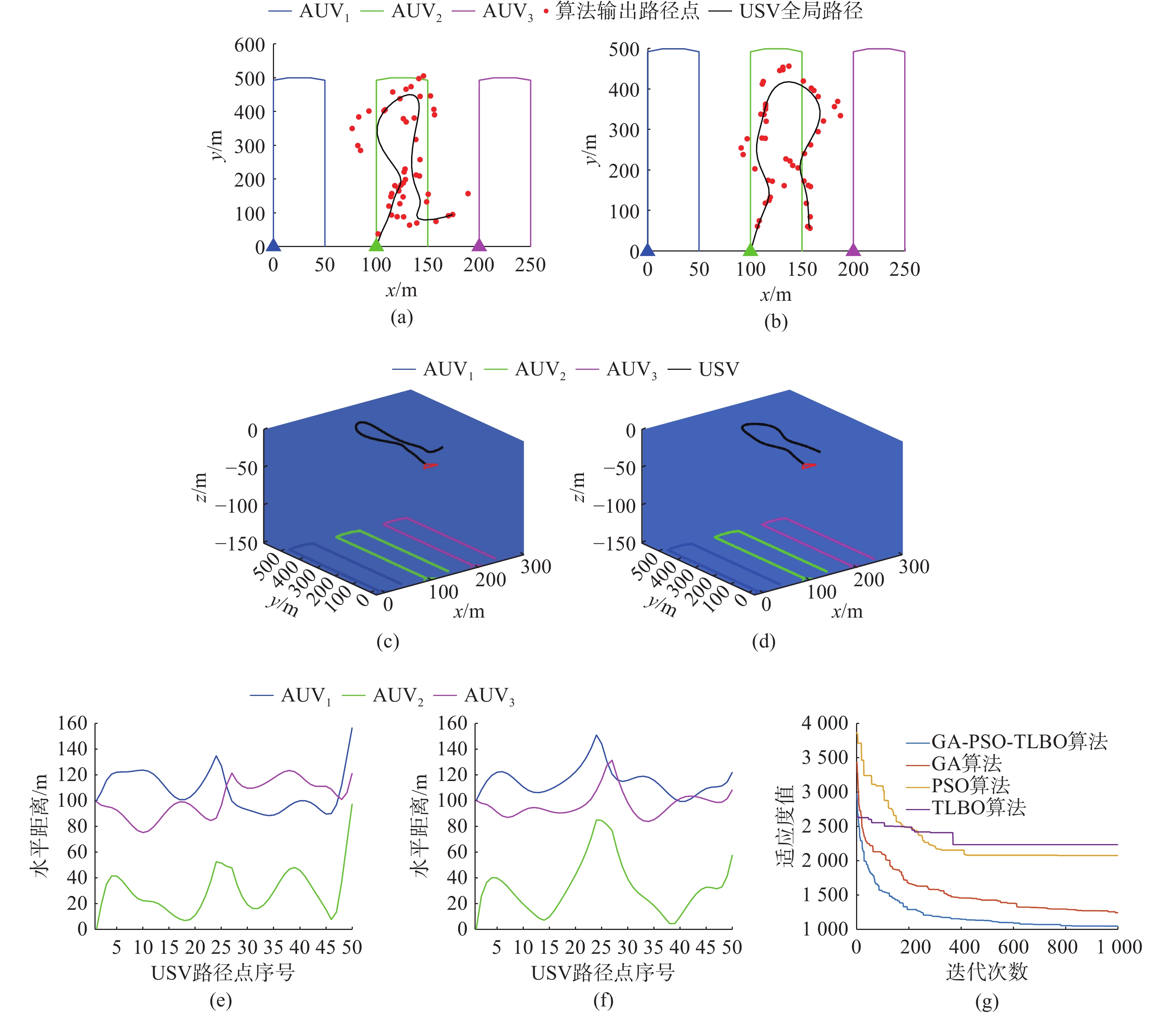
图 7 不同算法在仿真场景2中的规划结果
Figure 7. Planning results of different algorithms in simulation scenario 2
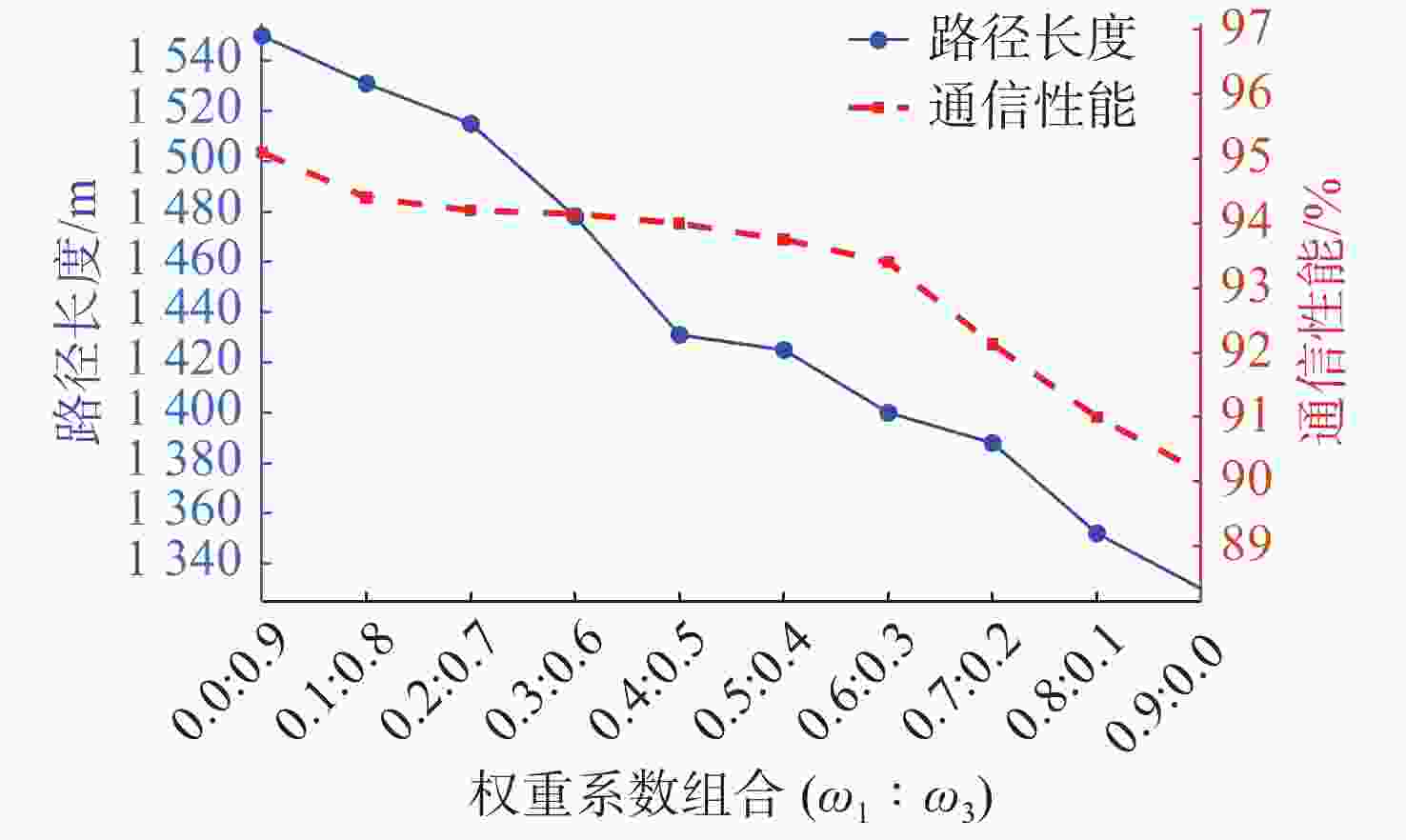
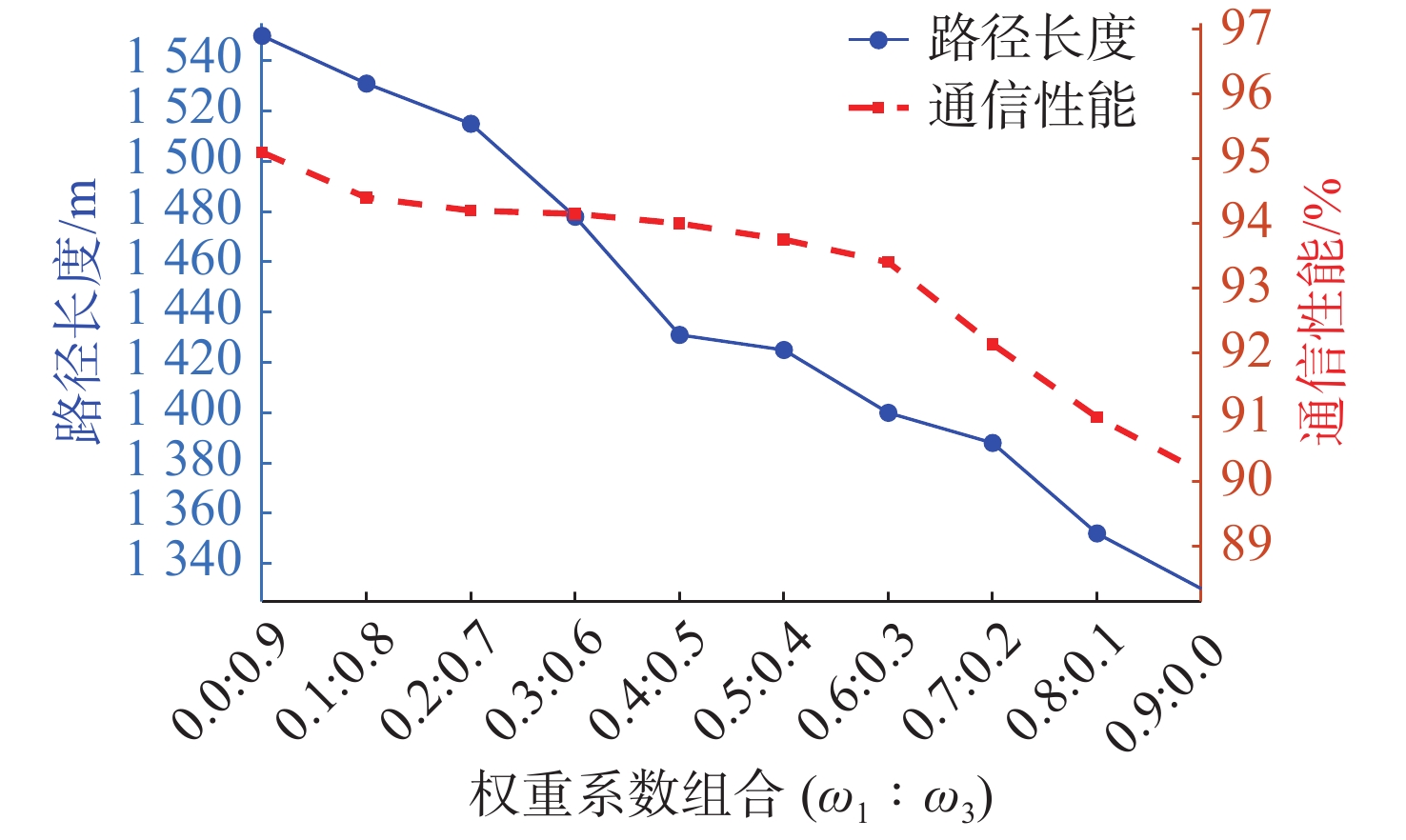
图 8 权重系数变化对路径规划效果的影响
Figure 8. The impact of changes in weight coefficients on the effectiveness of path planning
表 1 不同高度差下的路径规划结果
Table 1. Path planning results under different height differences
USV-AUV
高度差/mGA GA-PSO-TLBO 路径
长度/m通信性
能评估/%USV
最大转
角/(°)路径
长度/m通信性
能评估/%USV
最大转
角/(°)100 1052 97.33 40.16 1052 97.33 40.40 150 1279 96.00 75.37 1130 96.67 75.20 200 1280 95.34 92.56 1203 96.33 66.07 250 1311 95.33 93.81 1211 95.50 103.60 300 1562 94.10 107.84 1431 94.40 103.53  下载: 导出CSV
下载: 导出CSV
表 2 不同稳定通信距离下的路径规划结果
Table 2. Path planning results under different stable communication distances
稳定通
信距离/mGA GA-PSO-TLBO 路径
长度/m通信
性能
评估/%USV
最大
转角/(°)路径
长度/m通信
性能
评估/%USV
最大
转角/(°)100 1050 79.74 40.24 1050 79.74 40.70 150 1280 82.98 72.79 1170 84.50 72.77 200 1280 89.29 93.44 1250 90.33 84.35 250 1310 93.13 90.98 1200 95.50 100.80 300 1660 94.99 111.10 1474 97.00 106.77
下载: 导出CSV
-
[1] BERTRAM V. Unmanned surface vehicles-A survey[J]. Skibsteknisk Selskab, 2008, 1: 1-14. [2] 焦慧峰, 叶琛, 王文初, 等. 基于移动长基线和导航误差修正的USV/UUV协同导航算法[J]. 水下无人系统学报, 2024, 32(5): 864-873. doi: 10.11993/j.issn.2096-3920.2024-0005JIAO H F, YE C, WANG W C, et al. USV/UUV cooperative navigation algorithm based on moving long baseline and navigation error correction[J]. Journal of Unmanned Undersea Systems, 2024, 32(5): 864-873. doi: 10.11993/j.issn.2096-3920.2024-0005 [3] 冯业, 杜民. 基于无人机平台的水下通信中继技术研究[J]. 电脑与信息技术, 2025, 33(2): 61-63,90. doi: 10.3969/j.issn.1005-1228.2025.02.013 [4] YUAN X, WANG J, TONG C, et al. Integrated path planning for AUV communication efficiency and obstacle avoidance based on ant colony optimization and three-dimensional dynamic window algorithm[J]. Applied Ocean Research, 2025, 156: 104465. doi: 10.1016/j.apor.2025.104465 [5] 王洋, 沈同圣, 汪涛, 等. 融合多特征的水声通信信号调制识别方法[J]. 声学学报, 2025, 50(5): 1338-1348. doi: 10.12395/0371-0025.2023246 [6] FAN Y, QIAO S, WANG G, et al. A modified adaptive Kalman filtering method for maneuvering target tracking of unmanned surface vehicles[J]. Ocean Engineering, 2022, 266: 112890. doi: 10.1016/j.oceaneng.2022.112890 [7] 谢志华, 蒋丞, 吴俊超, 等. 水下目标多平台协同定位和跟踪方法[J]. 声学学报, 2021, 46(6): 1028-1038. [8] SANG H, YOU Y, SUN X, et al. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223: 108709. doi: 10.1016/j.oceaneng.2021.108709 [9] GUO X, JI M, ZHAO Z, et al. Global path planning and multi-objective path control for unmanned surface vehicle based on modified particle swarm optimization(PSO) algorithm[J]. Ocean Engineering, 2020, 216: 107693. doi: 10.1016/j.oceaneng.2020.107693 [10] XIN J, ZHONG J, YANG F, et al. An improved genetic algorithm for path-planning of unmanned surface vehicle[J]. Sensors, 2019, 19(11): 2640. doi: 10.3390/s19112640 [11] 孙硕, 杨少龙, 向先波, 等. 基于动态领域势场法的船舶避碰路径规划[J]. 水下无人系统学报, 2023, 31(5): 679-686. doi: 10.11993/j.issn.2096-3920.2022-0058SUN S, YANG S L, XIANG X B, et al. Ship collision avoidance path planning based on dynamic domain potential field[J]. Journal of Unmanned Underwater Systems, 2023, 31(5): 679-686. doi: 10.11993/j.issn.2096-3920.2022-0058 [12] 宋俊辉, 刘宇庭, 郭世杰. 动态环境下AIP-RRT*与DGF-APF融合的机器人路径规划[J]. 仪器仪表学报, 2025, 46(3): 51-64. doi: 10.19650/j.cnki.cjsi.J2413268 [13] 庞舟岐, 郝程鹏, 林晓波, 等. 基于深度强化学习的水下无人航行器高速目标捕获路径规划[J]. 控制理论与应用, 2025, 42(10): 1968-1980. doi: 10.7641/CTA.2025.40272 [14] XUE J, HE M, CHEN J, et al. Improved DDPG based on enhancing decision evaluation for path planning in high-density environments[J]. Expert Systems with Applications, 2025, 279: 127378. [15] VERMA D, VERMA H, TIWARI P K. A hybrid approach for MRI brain image segmentation using KIFECM-IPSO algorithm[J]. Expert Systems with Applications, 2025, 268: 126239. doi: 10.1016/j.eswa.2024.126239 [16] LIU N, HU Z, WEI M, et al. Improved A* algorithm incorporating RRT* thought: A path planning algorithm for AGV in digitalised workshops[J]. Computers & Operations Research, 2025, 177: 106993. [17] XU B, ZHU H, GUO Y. A robust iterative algorithm for SINS/USBL integrated navigation based on dual hydrophone differential model[J]. Measurement, 2025, 242: 115854. doi: 10.1016/j.measurement.2024.115854 [18] 杨士莪. 水声传播原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2007. [19] LI X, ZHANG W. Application of Snell’s law in reflection raytracing using the multistage fast marching method[J]. Earthquake Research Advances, 2021, 1(1): 100009. doi: 10.1016/j.eqrea.2021.100009 [20] LIU Y, CHEN Y, ZHANG Y, et al. Research on reconstruction of the global sound speed profile combining partial underwater prior information[J]. Journal of Sea Research, 2024, 200: 102516. doi: 10.1016/j.seares.2024.102516 [21] SUN T, JIN J, YANG Y, et al. A multi-order Fractional Fourier domain feature union method for active sonar target classification[J]. Applied Acoustics, 2023, 205: 109257. doi: 10.1016/j.apacoust.2023.109257 [22] AN L, HUANG X, YANG P, et al. Adaptive bézier curve-based path following control for autonomous driving robots[J]. Robotics and Autonomous Systems, 2025, 189: 104969. doi: 10.1016/j.robot.2025.104969 [23] 卢俊, 张群飞, 史文涛. 水下探测通信一体化关键技术分析[J]. 水下无人系统学报, 2018, 26(5): 470-479. doi: 10.11993/j.issn.2096-3920.2018.05.015LU J, ZHANG Q F, SHI W T. Analysis on the key technology of integrated underwater detection and communication[J]. Journal of Unmanned Underwater Systems, 2018, 26(5): 470-479. doi: 10.11993/j.issn.2096-3920.2018.05.015 [24] YUN Y, GEN M, ERDENE T N. Applying GA-PSO-TLBO approach to engineering optimization problems[J]. Mathematical Biosciences and Engineering, 2023, 20(1): 552-571. doi: 10.3934/mbe.2023025 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1393
- HTML全文浏览量: 223
- PDF下载量: 171
- 被引次数: 0