摘要:
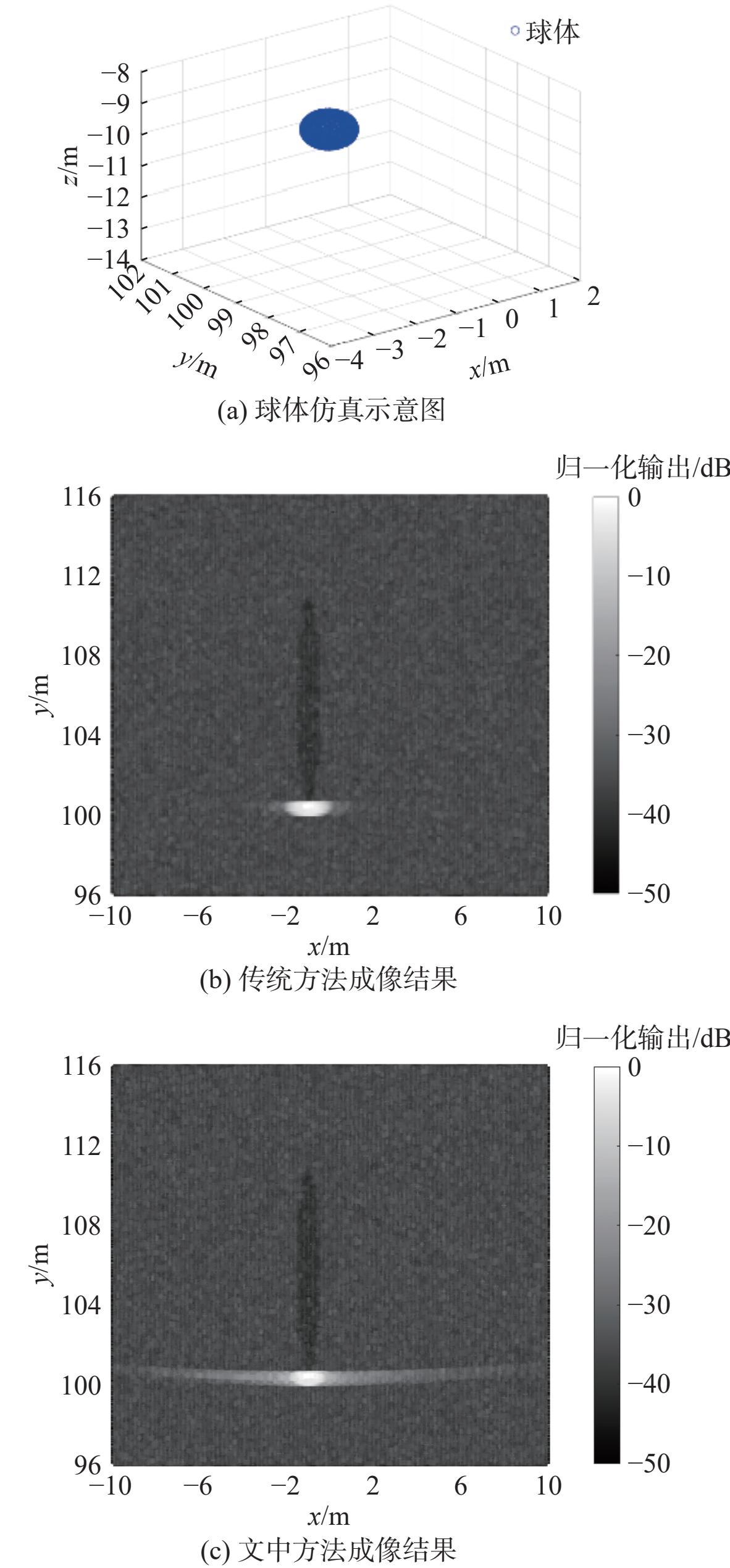
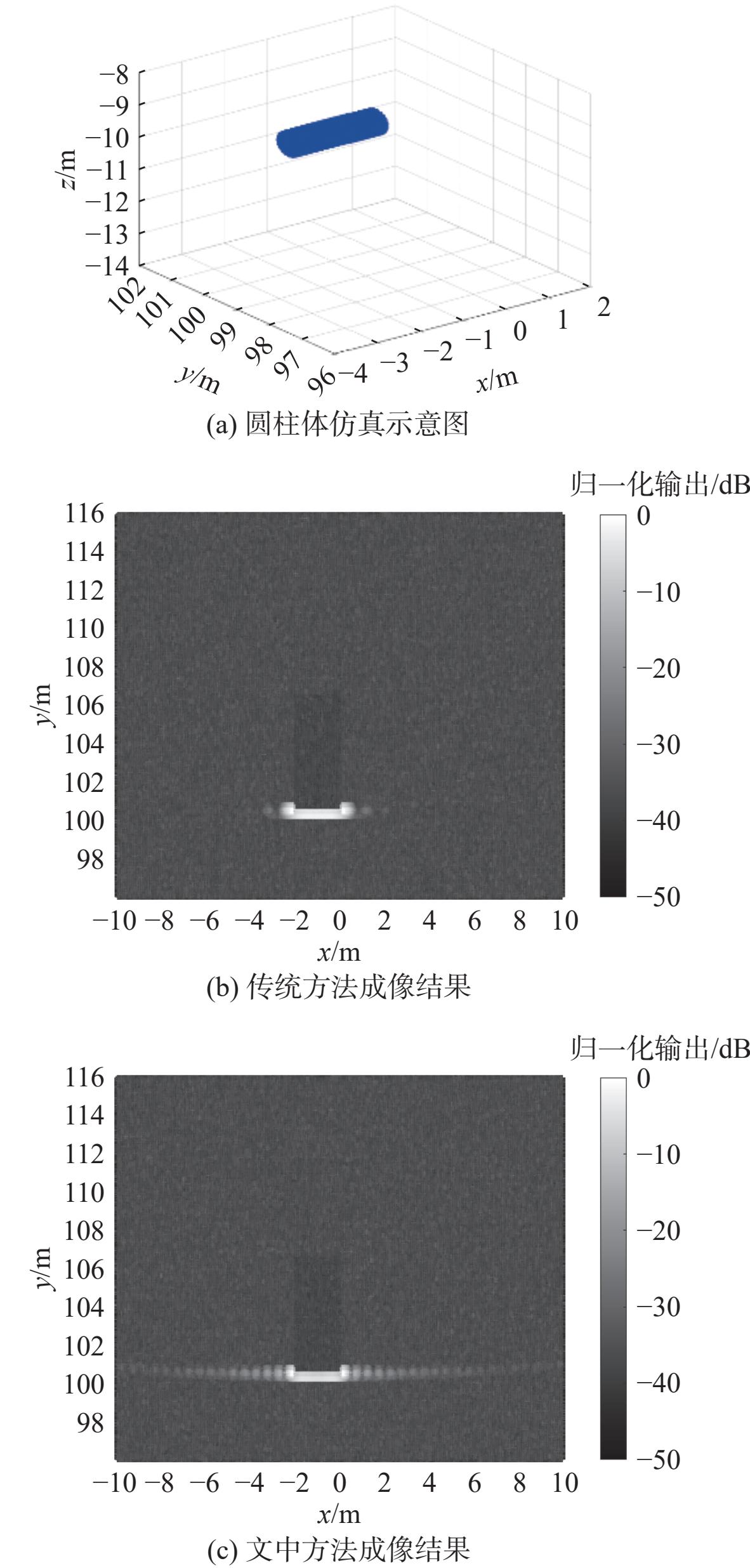
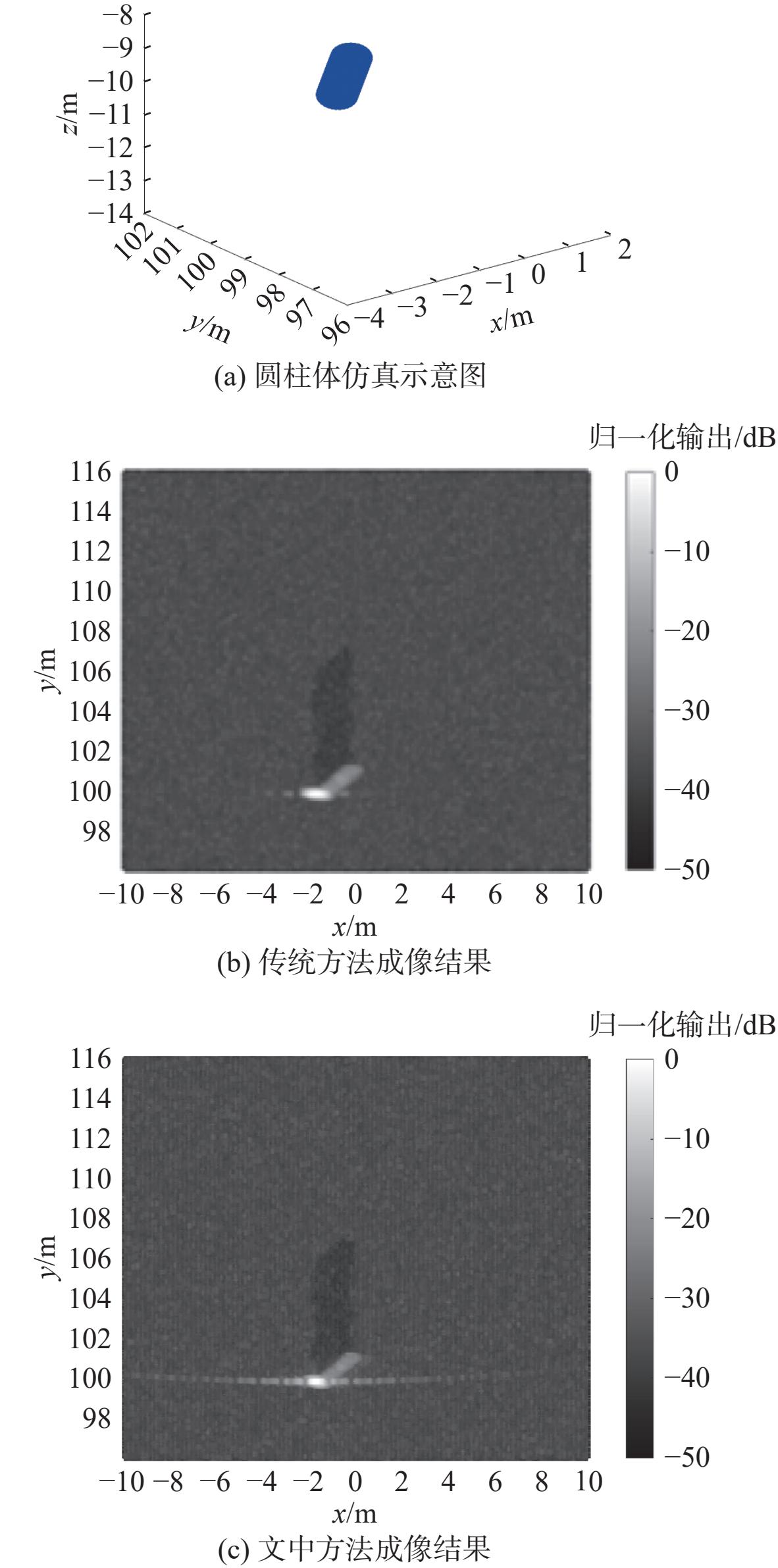
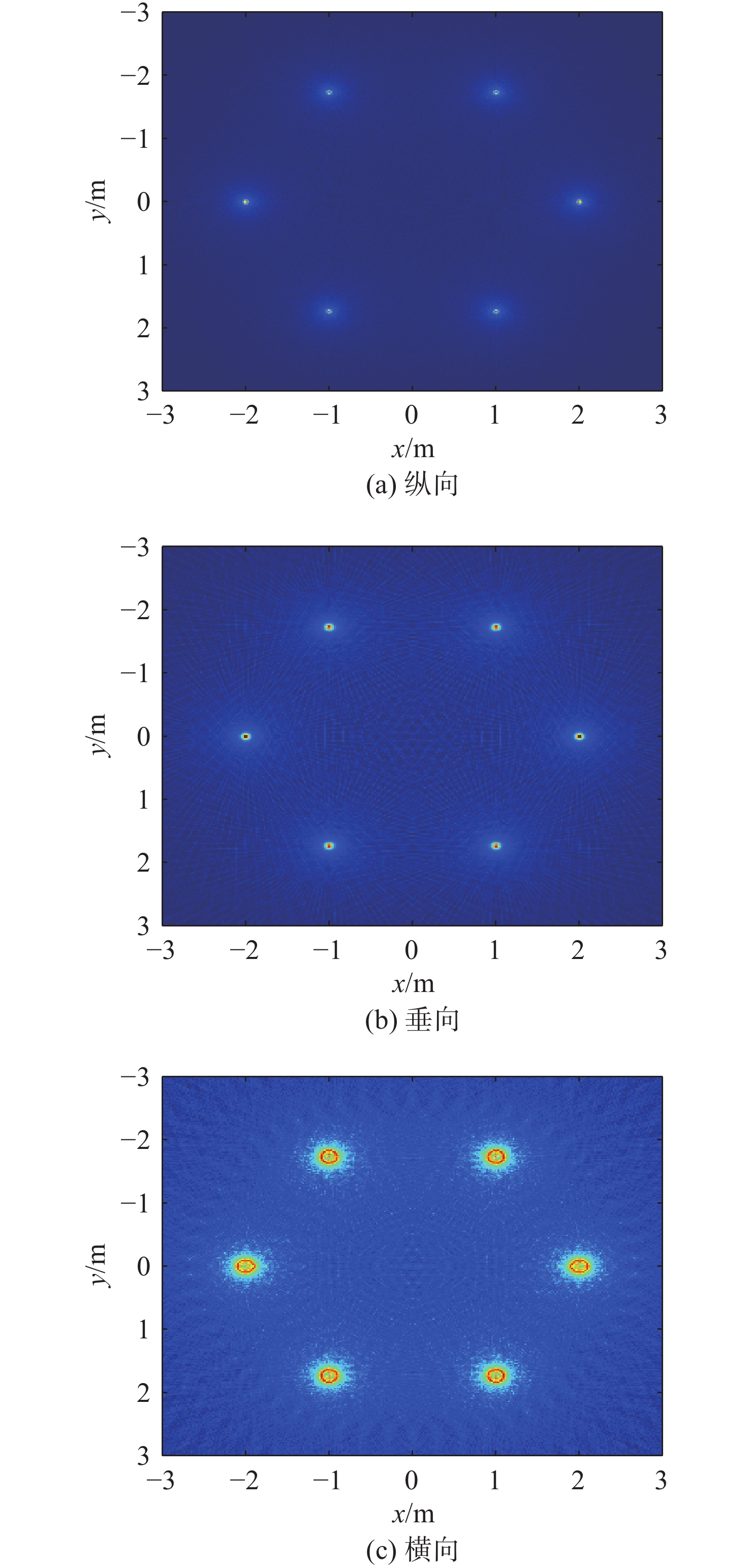
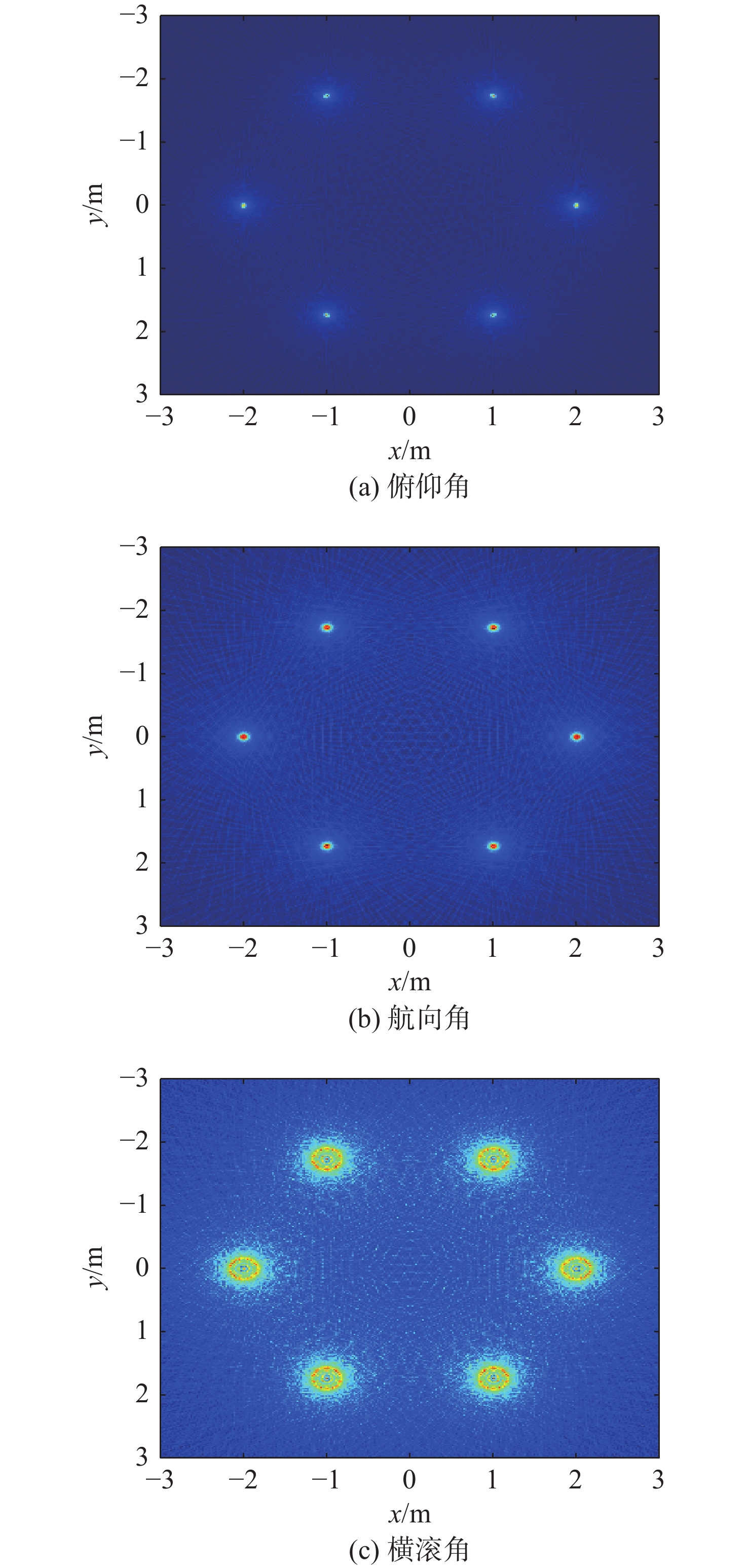
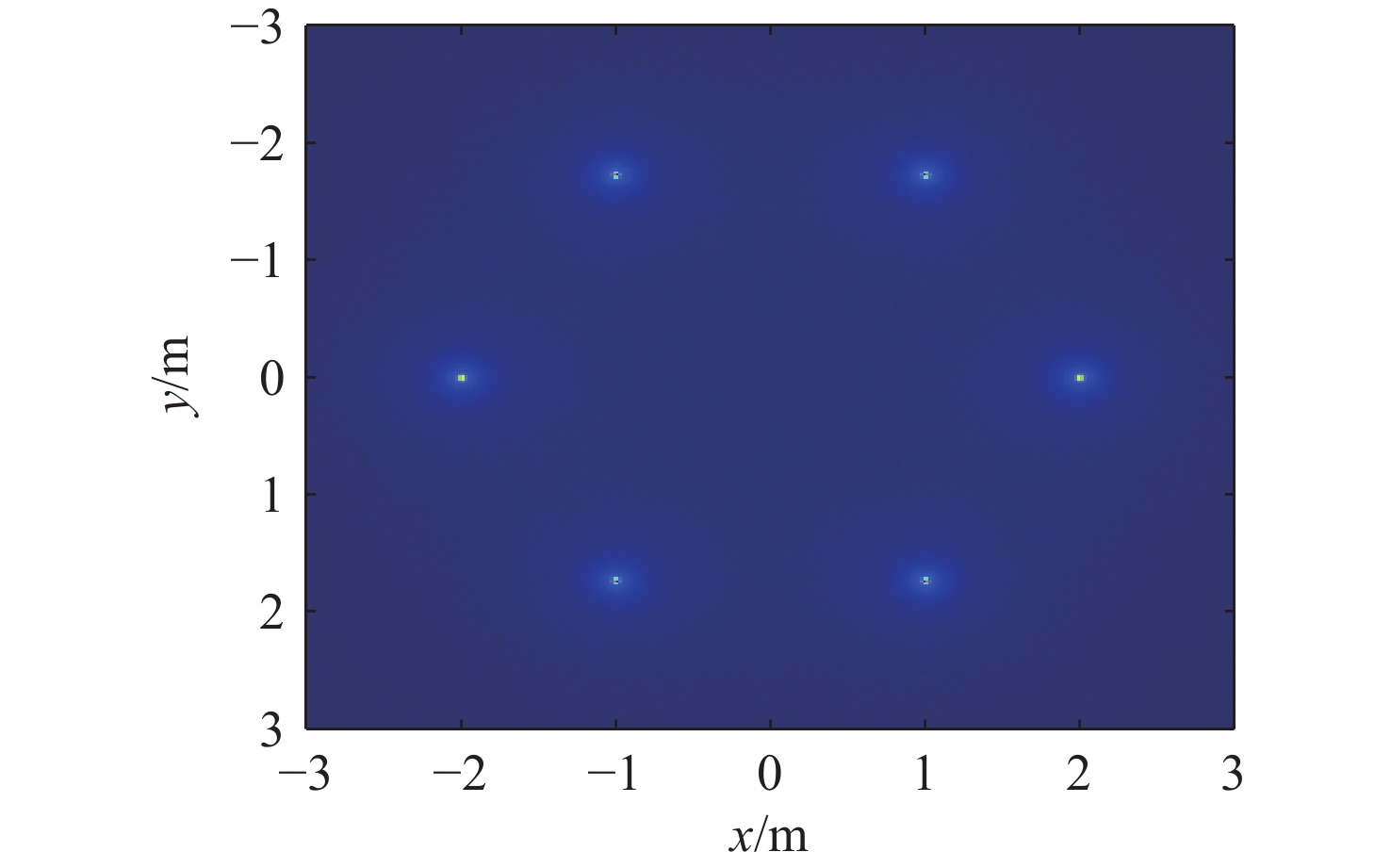
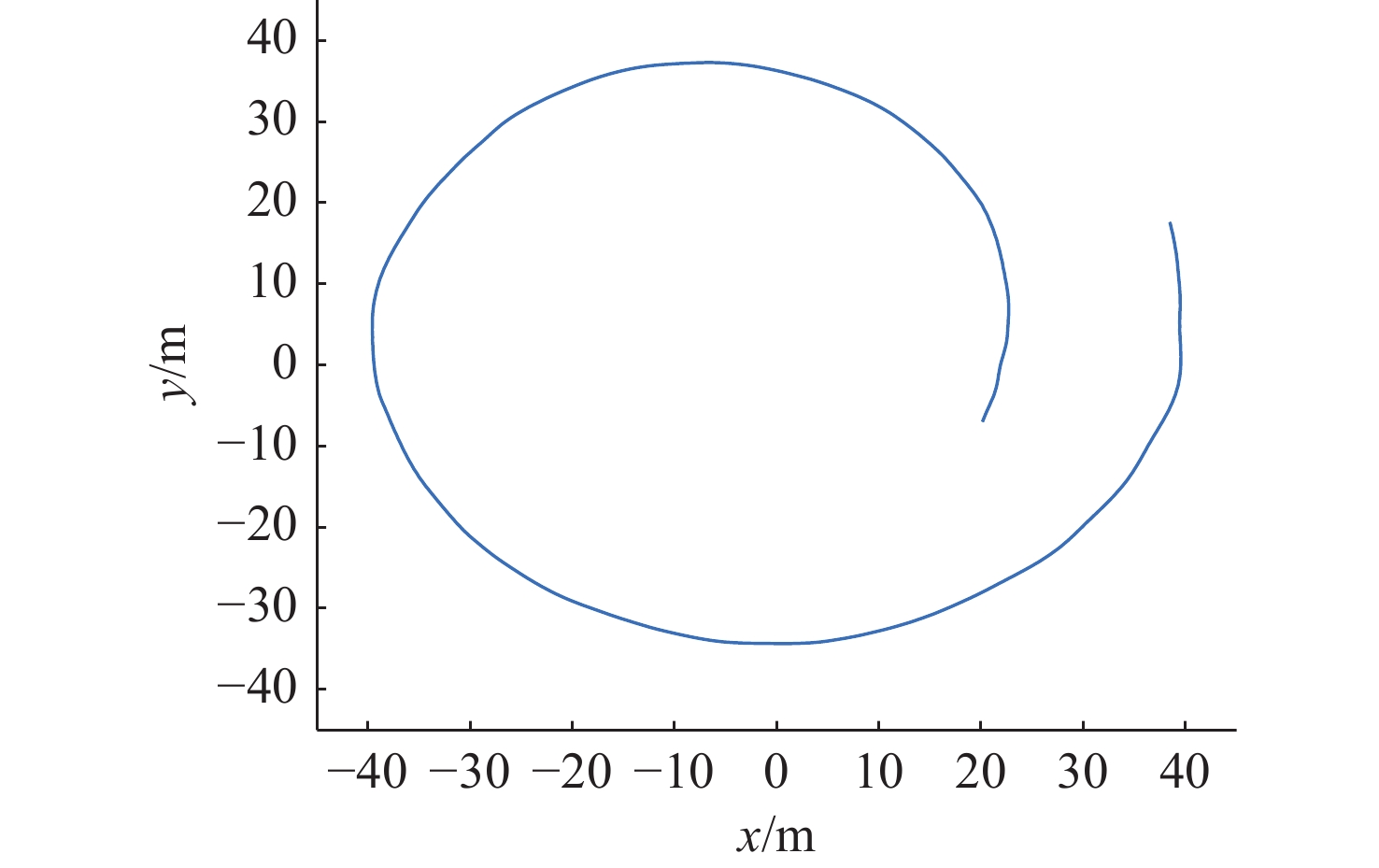
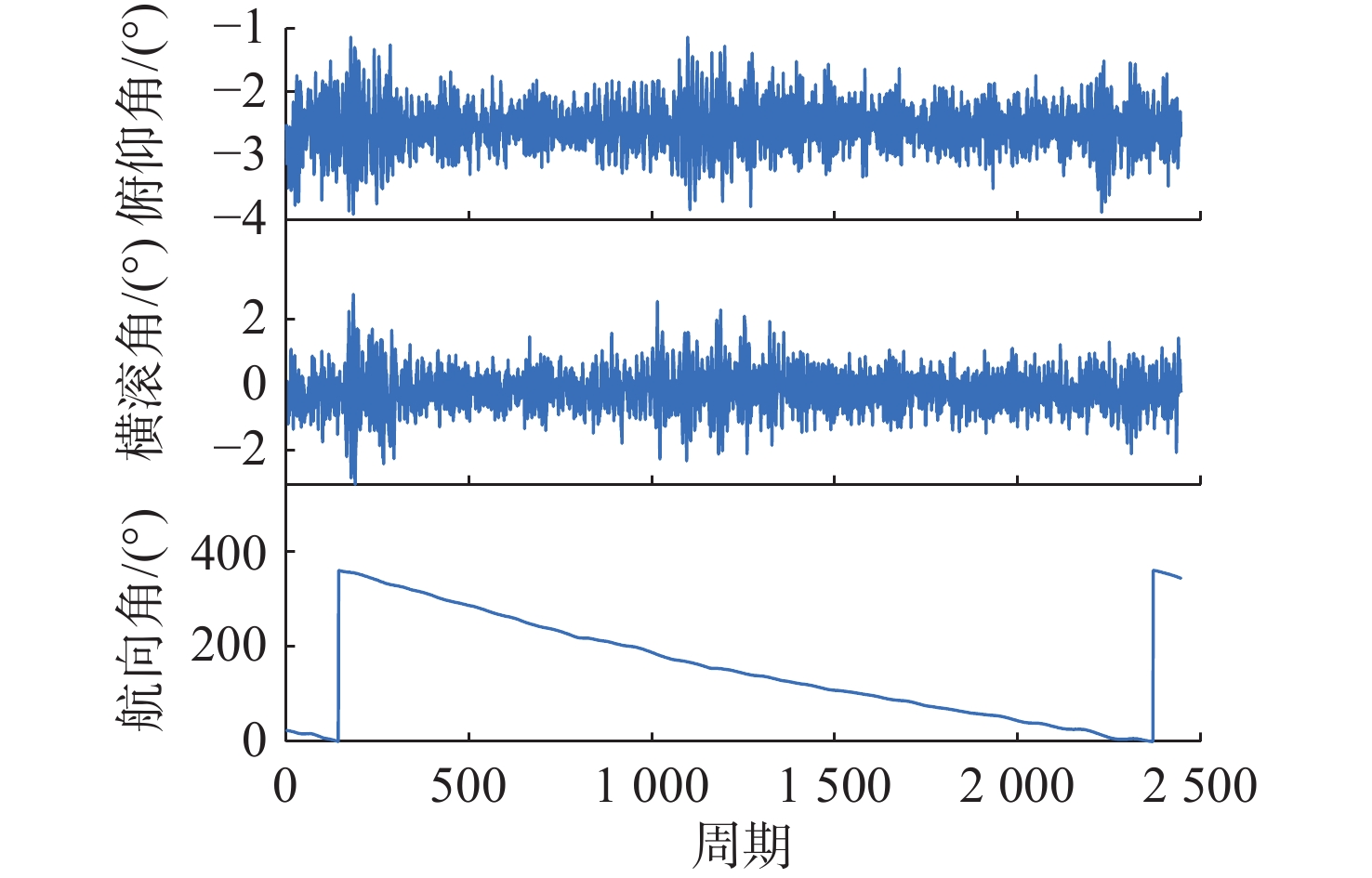
圆周合成孔径声呐(CSAS)是一种搭载于移动平台、具备高分辨力的水下成像声呐系统, 其成像质量对平台位姿精度高度敏感。实际测绘过程中, 平台常受到水流、风浪等环境因素影响, 导致其运动轨迹偏离理想路径, 产生位置和姿态偏差, 严重影响成像质量。现有CSAS运动补偿方法多依赖水声定位系统获取平台位置信息, 通常需要额外布设水声基站, 对外部辅助设备存在一定依赖。针对这一问题, 文中围绕CSAS平台运动误差对成像结果的影响及其几何补偿方法开展研究, 构建了一种基于全球定位系统(GPS)与惯性导航系统(INS)多传感器组合的CSAS平台运动补偿方法。该方法通过融合GPS获取的平台位置信息与INS提供的姿态数据, 实现对声呐平台位姿的联合估计, 并据此对声呐阵列空间位置进行修正, 从而减小平台运动误差对成像结果的影响。文中仿真分析了平台运动误差对成像结果的影响, 并通过湖上试验数据验证了所提方法的有效性。试验结果表明, 该方法能有效修正平台运动引起的运动误差, 提升CSAS成像质量。该方法无需依赖外部水声定位系统, 仅利用平台自主导航传感器即可实现有效运动补偿, 为CSAS系统在复杂环境下的高分辨成像提供了一种简便实用的技术途径。
黄天风, 叶天明, 杜选民, 等. 基于多传感器的圆周合成孔径声呐运动补偿方法[J]. 水下无人系统学报, 2026, 34(3): 516-523. doi: 10.11993/j.issn.2096-3920.2026-0063.