Overall Design and Motion Control of an ROV Based on Pixhawk and Open-Source Architecture
-
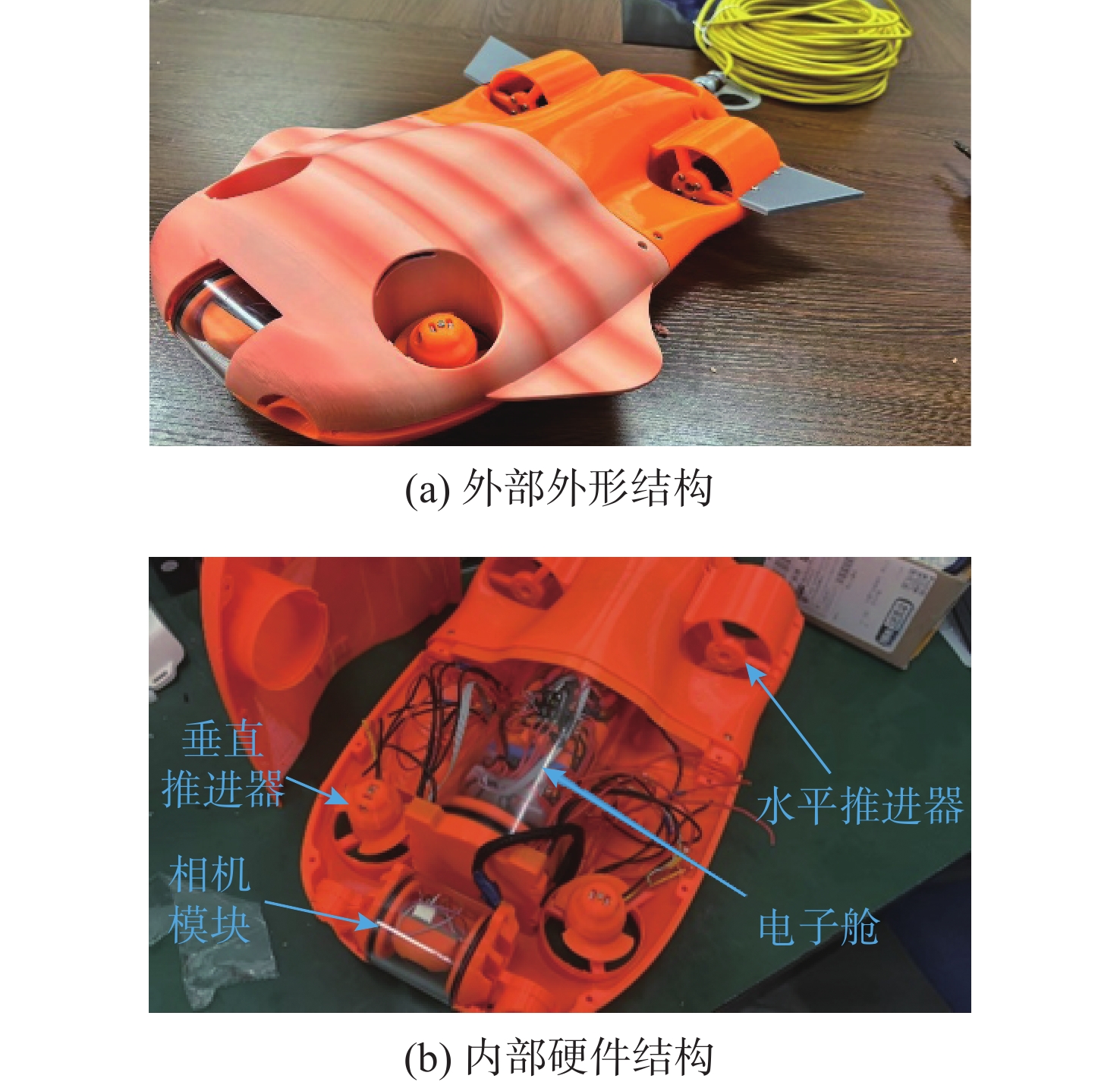
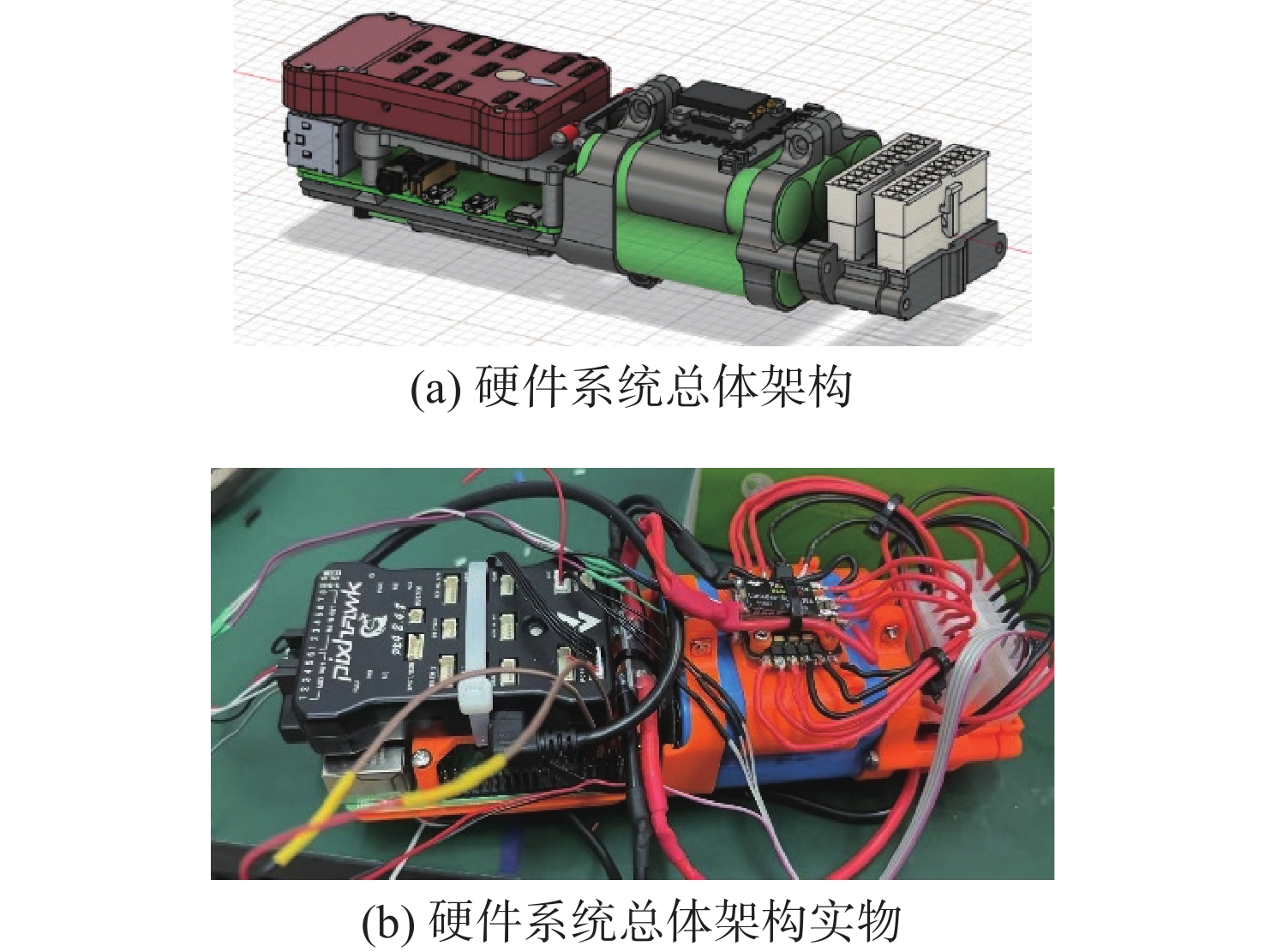
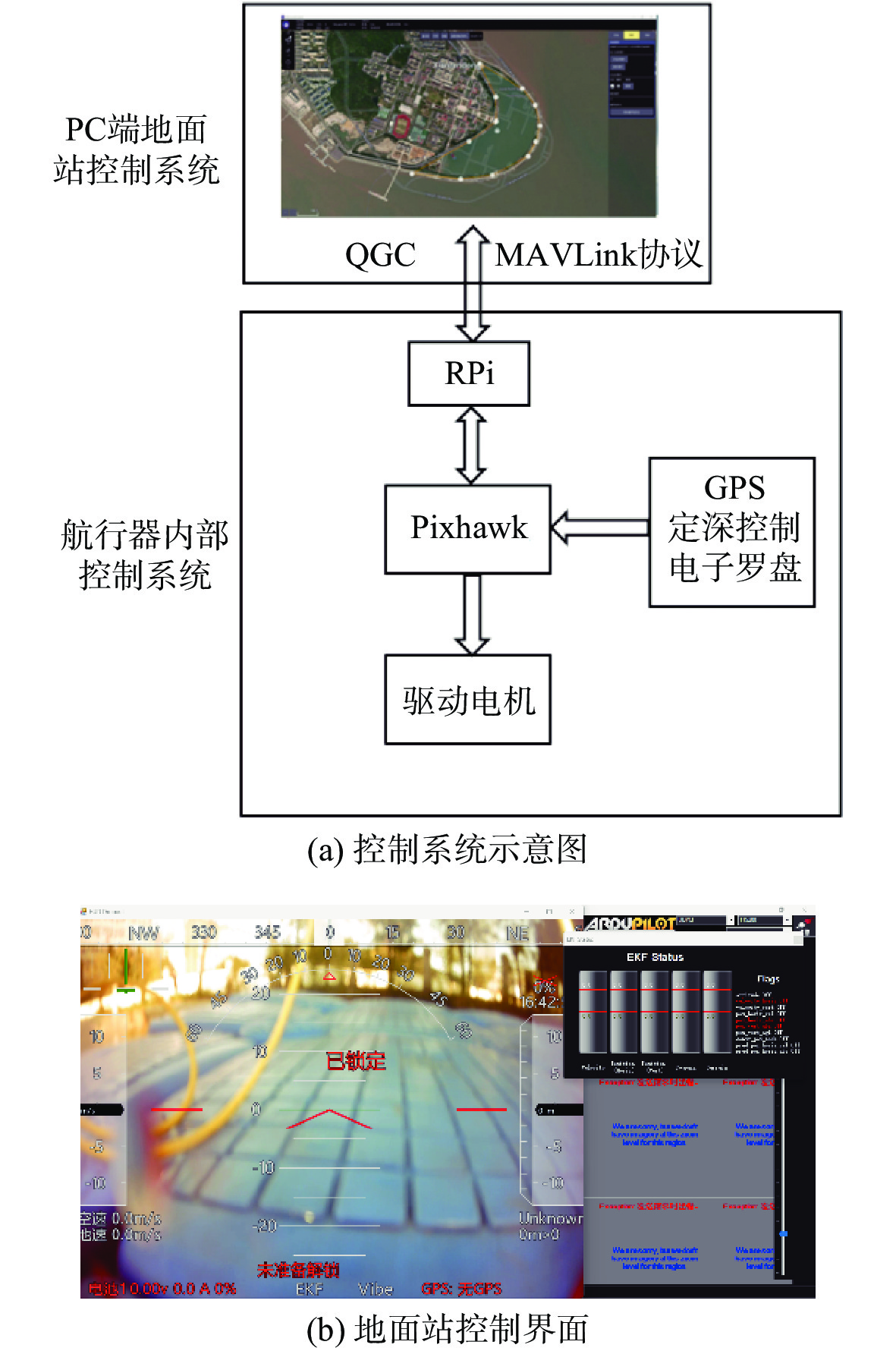
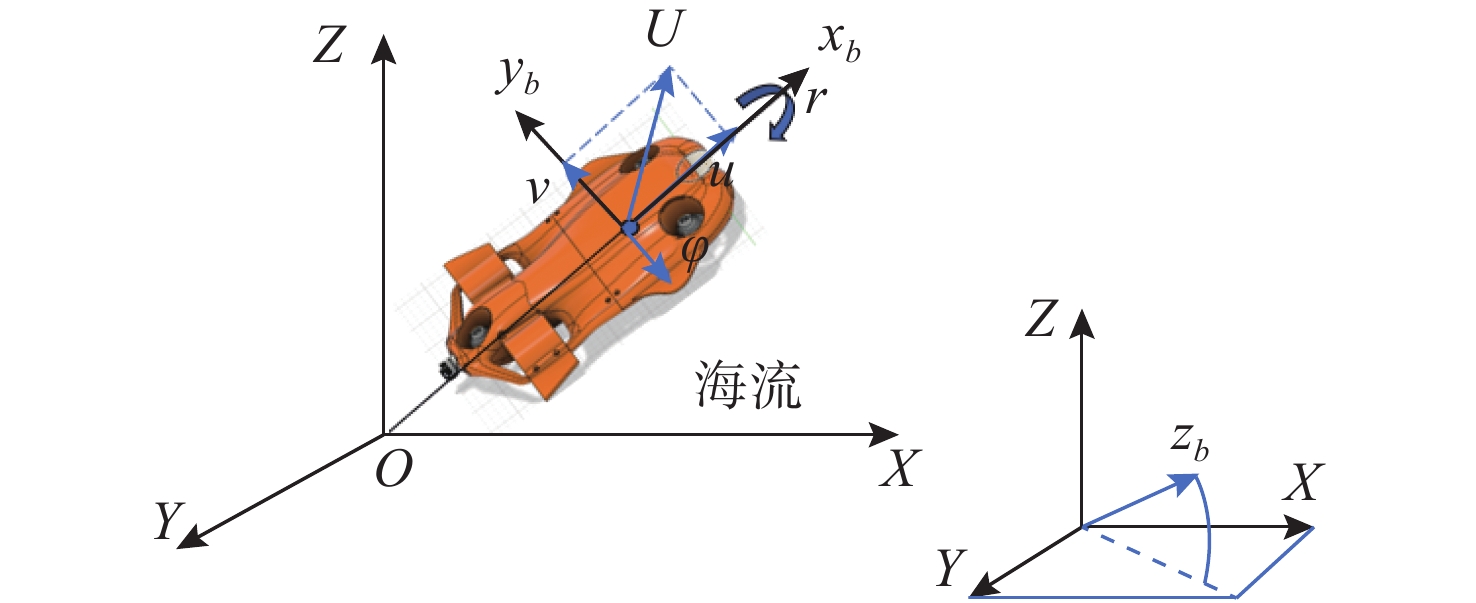
摘要: 为优化水下航行器开发周期与项目成本, 文中设计并实现了一种基于开源软硬件平台的遥控水下航行器(ROV)系统。首先, 利用Fusion360软件完成ROV的三维建模, 并采用3D打印技术实现原型快速制作; 其次, 设计构建了一种Pixhawk与树莓派(RPi)的组合式分层控制架构: 上层由RPi作为决策单元, 负责运行机器人操作系统(ROS)节点、处理视觉数据、执行任务规划及与地面站的高速通信; 下层由Pixhawk作为实时运动控制单元, 负责航行姿态计算和推进器驱动, 通过MAVLink通信协议实现上下层间及与远程地面站的数据交互。静水环境测试结果表明, 该ROV平台能稳定接收并响应地面站发送的控制指令, 定深控制精度在±0.3 m以内, 航向控制偏差小于±3°。研究表明, 基于开源Pixhawk飞控平台与低成本制造技术的研发路径具备可实现性, 该方案缩短了航行器的开发周期, 降低了成本, 并且其软硬件架构可扩展, 为中小型水下探测装备的快速研发提供了可复用的技术参考与实践经验。Abstract: To optimize the development cycle and project cost of undersea vehicles, this paper designed and implemented a remotely operated vehicle(ROV) system based on an open-source hardware and software platform. First, this paper utilized Fusion360 software for the three-dimensional(3D) modeling of the ROV and adopted 3D printing technology to achieve rapid prototyping. Second, a combined hierarchical control architecture of Pixhawk and Raspberry Pi(RPi) was designed and constructed. The upper layer used RPi as the decision-making unit to run robot operating system(ROS) nodes, process visual data, execute task planning, and conduct high-speed communication with the ground station. The lower layer used Pixhawk as the real-time motion control unit to calculate navigation attitude and drive thrusters. Data interaction between the upper and lower layers, as well as between the system and the remote ground station, was realized through the MAVLink communication protocol. Test results in a static water environment show that the ROV can stably receive and respond to control commands sent by the ground station, with a depth-keeping control accuracy within ±0.3 m and a heading control deviation of less than ±3°. The research indicates that the development path based on the open-source Pixhawk flight control platform and low-cost manufacturing technology is feasible. This scheme shortens the development cycle and reduces the cost of the undersea vehicle, and its hardware and software architecture is scalable, providing reusable technical references and practical experience for the rapid development of small and medium-sized underwater detection equipment.
-
Key words:
- remotely operated vehicle /
- Pixhawk /
- open-source architecture /
- overall design /
- motion control
-
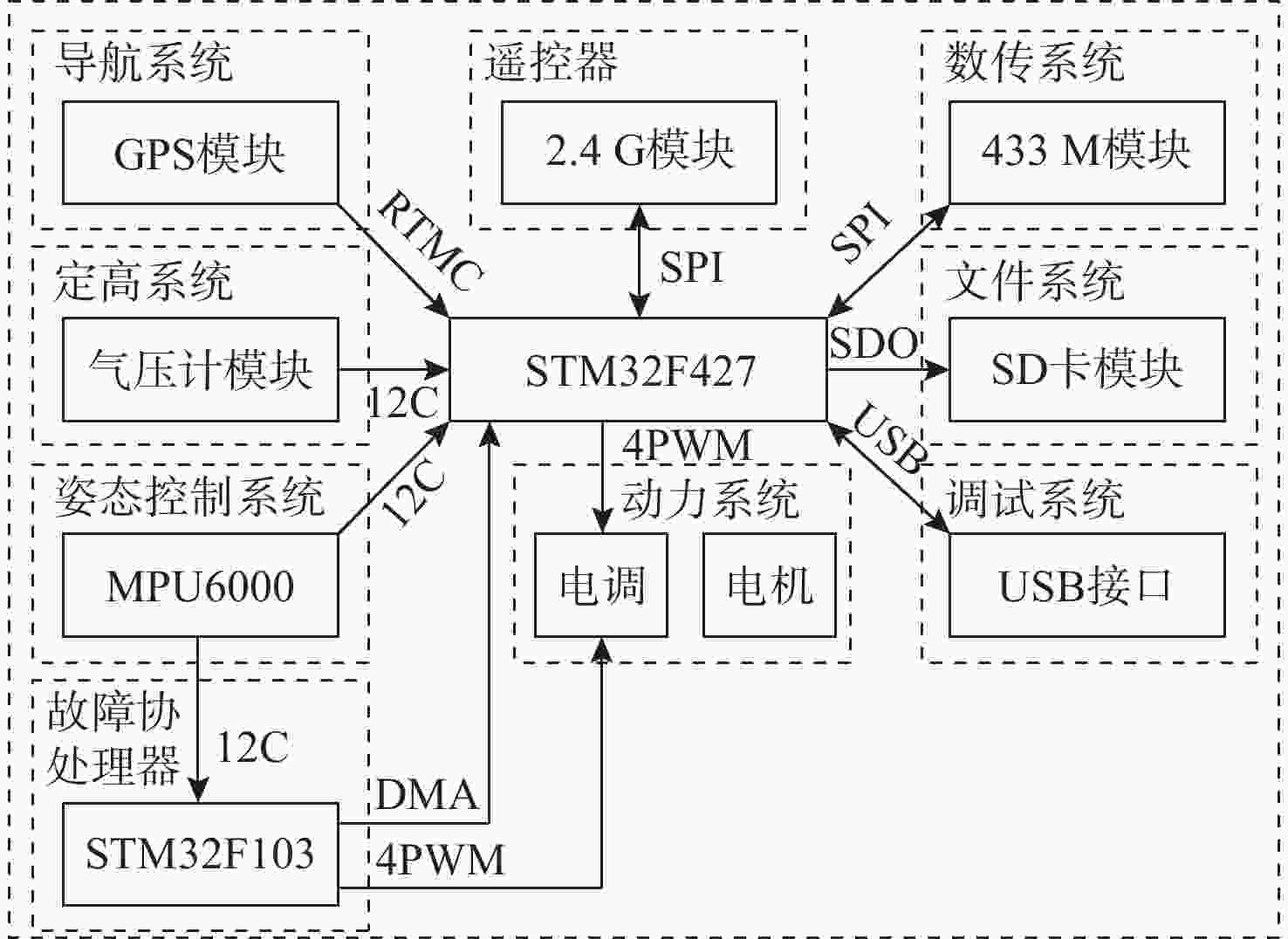
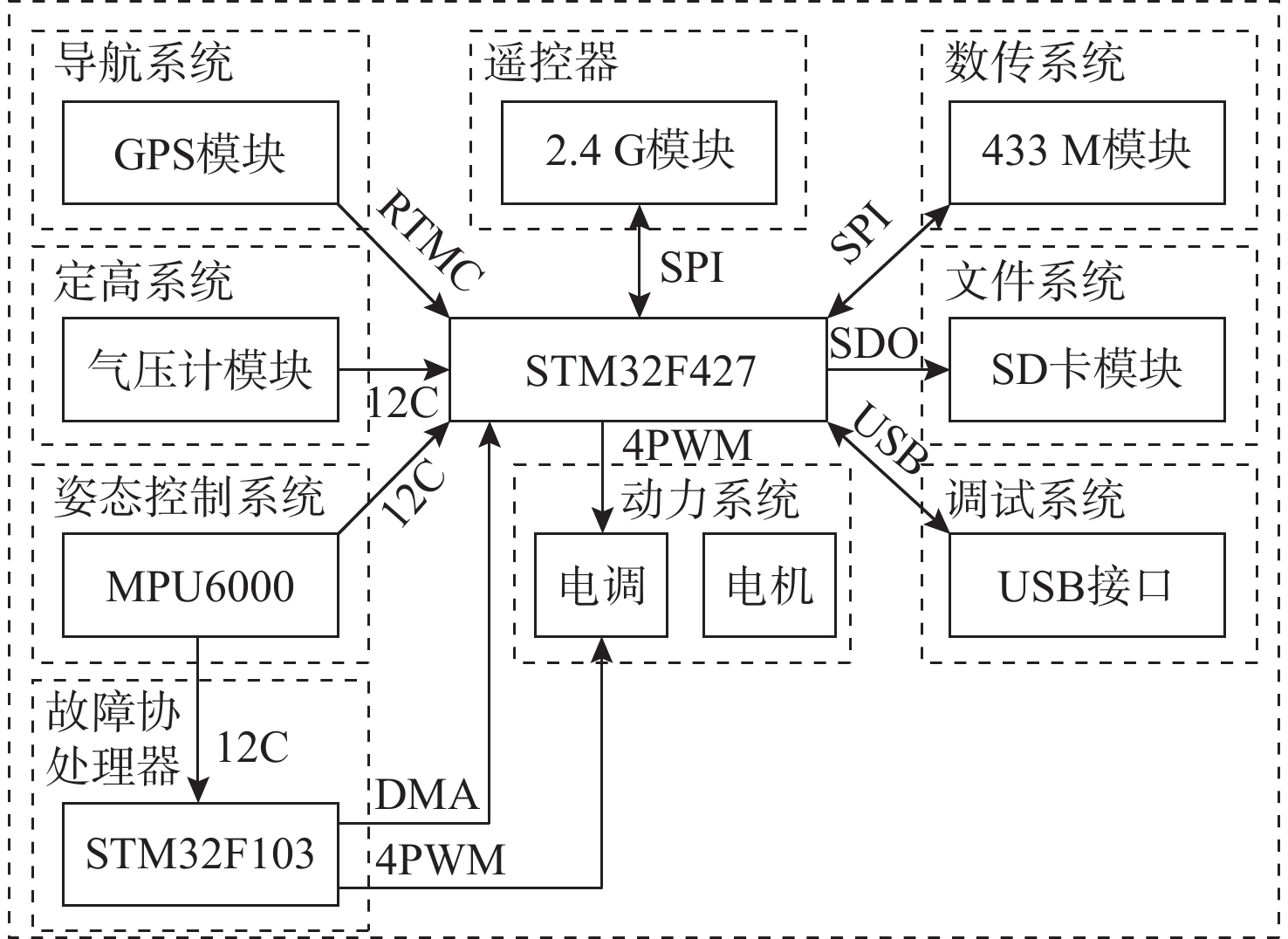
图 7 Pixhawk硬件框图
注: RTMC为实时惯性测量与控制单元(real-time monitoring center); SPI为串行外设接口(serial peripheral interface); SDO为串行数据输出(serial data out); DMA为直接内存访问(direct memory access); 4PWM为4通道脉冲宽度调制输出(4-channel pulse width modulation)。
Figure 7. Hardware block diagram of Pixhawk
表 1 小型ROV设计参数
Table 1. Design parameters of the small ROV
指标参数 具体要求 外形尺寸 600 mm×450 mm×300 mm 质量与浮力 空气中质量小于15 kg, 具备轻微正浮力,
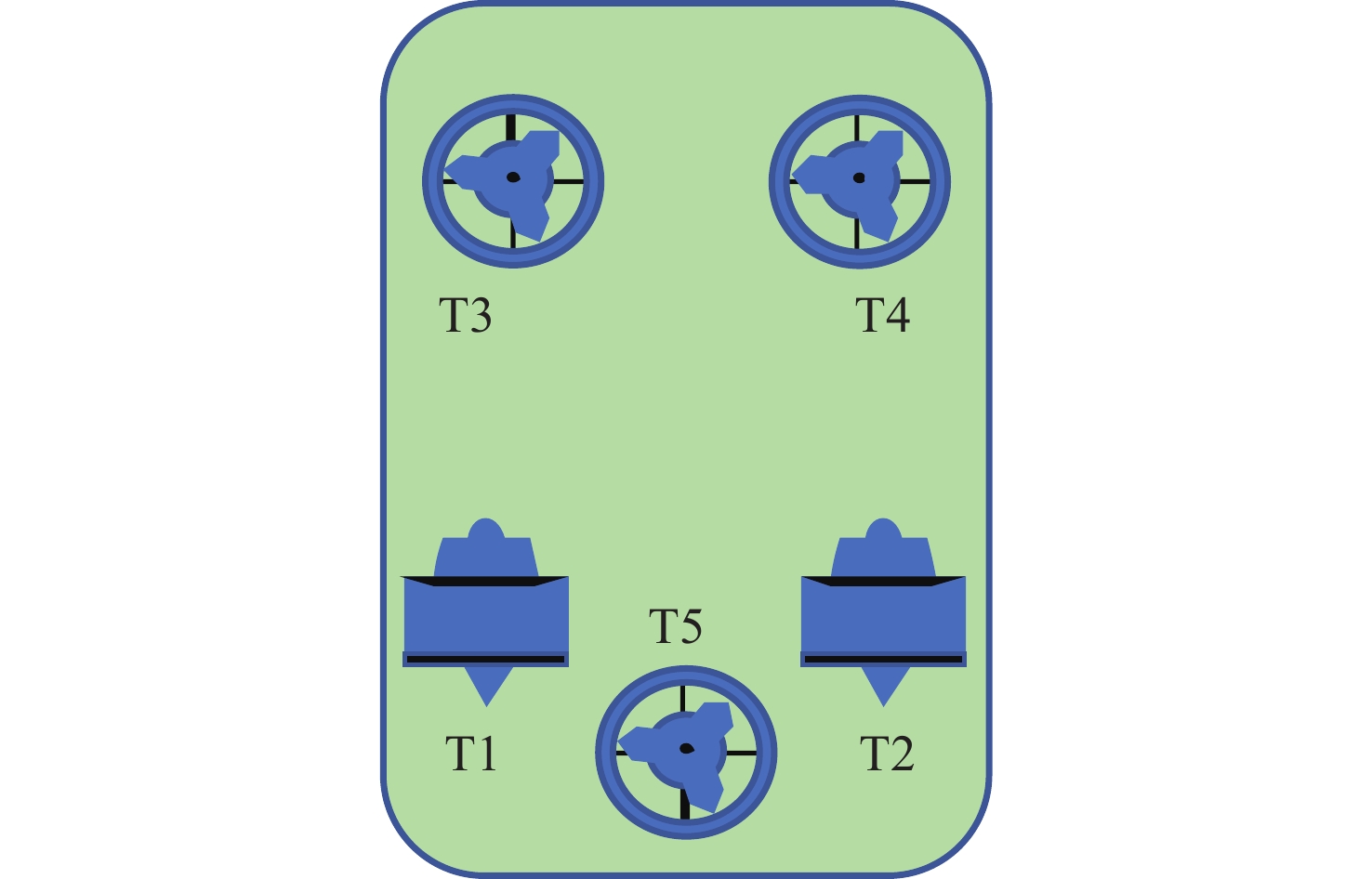
通过压载可实现中性浮力工作深度 最大深度10 m 机动性 具备纵荡、横荡、垂荡、艏摇4个自由度的运动能力 续航时间 可持续工作不少于1 h 控制系统 基于开源平台, 具备远程遥控和半自主控制能力  下载: 导出CSV
下载: 导出CSV
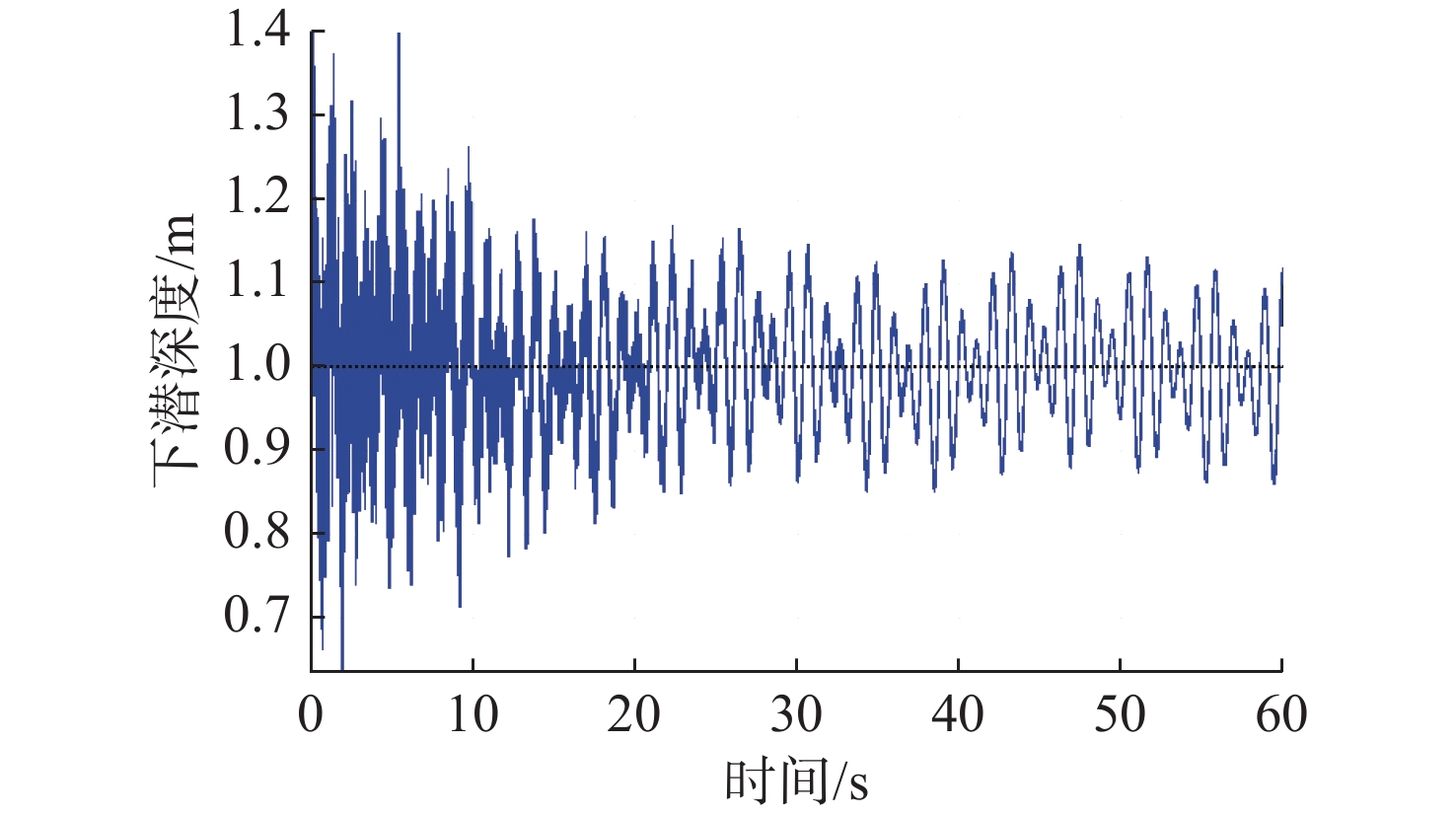
表 2 定深控制实验数据统计结果
Table 2. Statistical results of depth-keeping control experimental data
统计指标 数值 说明 平均深度/m 1.02 60 s内有效数据算术平均值 绝对误差/m ±0.3 最大正向/负向偏差 标准差/m 0.08 深度数据的离散程度 稳态误差/m ≤0.05 最后10 s数据与目标值的平均偏差 超调量/% 3.2 首次到达目标深度后, 最大深度
与目标值的比值
下载: 导出CSV
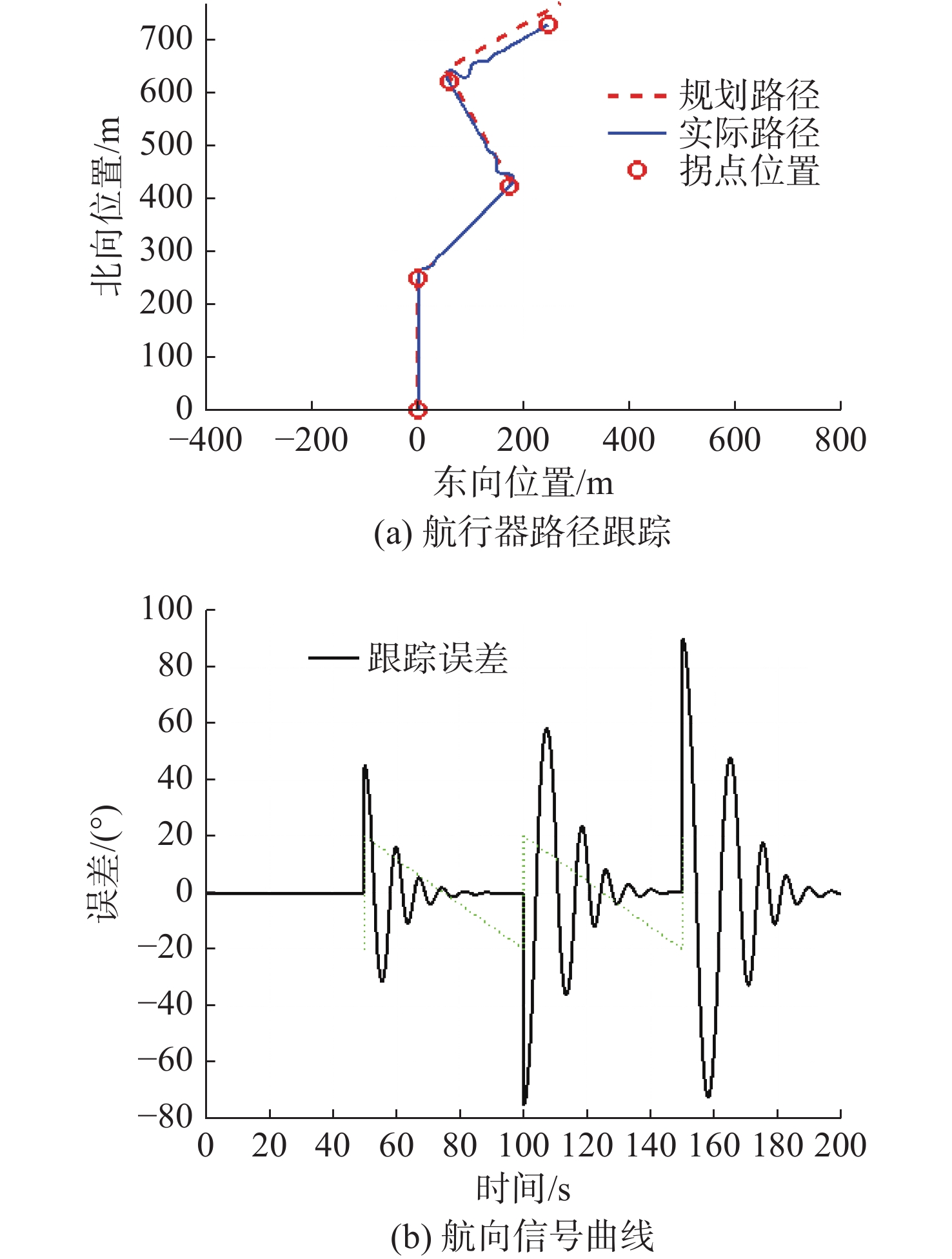
表 3 航向控制实验数据统计结果
Table 3. Statistical results of heading control experimental data
统计指标 数值 说明 平均航向角/(°) −0.8 60 s有效数据的算术平均值 正向偏差/(°) +4.2 航向最大值与目标值的差值 负向偏差/(°) −5.1 航向最小值与目标值的差值 偏差范围/(°) ±5.1 实际控制偏差范围 标准差/(°) 1.3 反映航向数据的离散程度 稳态误差/(°) ≤0.5 最后10 s数据与目标值的平均偏差 超调量/% 8.5 首次响应时最大航向与目标值的比值 调节时间/s 6.2 从发送指令到航向波动小于 ±1°所需的时间
下载: 导出CSV
-
[1] 管志光, 吴昊, 王学林, 等. 基于模糊PID的小型水下机器人运动控制研究[J]. 火力与指挥控制, 2024, 49(10): 111-117. doi: 10.3969/j.issn.1002-0640.2024.10.015GUAN Z G, WU H, WANG X L, et al. Research on motion control of small remote operated vehicles based on fuzzy PID[J]. Fire Control & Command Control, 2024, 49(10): 111-117. doi: 10.3969/j.issn.1002-0640.2024.10.015 [2] 李国虎, 周焕银. 基于自适应S面算法的小型ROV艏向和深度运动控制研究[J]. 机床与液压, 2024, 52(8): 34-38. doi: 10.3969/j.issn.1001-3881.2024.08.007 [3] 张渥, 许条建. 开架式ROV水动力特性数值模拟分析[J]. 中国舰船研究, 2025, 20(4): 111-123. doi: 10.19693/j.issn.1673-3185.04037ZHANG W, XU T J. Numerical simulation analysis of hydrodynamic characteristics of open-frame ROV[J]. Chinese Journal of Ship Research, 2025, 20(4): 111-123. doi: 10.19693/j.issn.1673-3185.04037 [4] 吴和龙, 向政蓉, 高宇航, 等. 基于Pixhawk飞控的硬件在环仿真系统设计[J]. 高技术通讯, 2024, 34(1): 46-53. doi: 10.3772/j.issn.1002-0470.2024.01.005WU H L, XIANG Z R, GAO Y H, et al. Design of hardware-in-the-loop simulation system based on Pixhawk flight controller[J]. High Technology Letters, 2024, 34(1): 46-53. doi: 10.3772/j.issn.1002-0470.2024.01.005 [5] YANG Y, BAN H, WANG J, et al. ROV-assisted in situ density estimation for sea cucumbers via lightweight YOLOv8-FA and enhanced ByteTrack[J]. Aquaculture International, 2025, 33(6): 507-507. doi: 10.1007/s10499-025-02170-x [6] 裴蕾, 田军委, 苏宇, 等. 超小型模块化ROV密封舱的结构设计及力学仿真[J]. 机床与液压, 2018, 46(21): 54-59. doi: 10.3969/j.issn.1001-3881.2018.21.012 [7] 张光义, 曾庆军, 戴晓强, 等. 水下安全检测与作业型机器人控制系统[J]. 中国舰船研究, 2018, 13(6): 113-119.ZHANG G Y, ZENG Q J, DAI X Q, et al. Underwater safety detection and operation robot control system[J]. Chinese Journal of Ship Research, 2018, 13(6): 113-119. [8] WANG J, XIANG S, SHEN T, et al. Imitation learning from observation for ROV path tracking[J]. Intelligent Marine Technology and Systems, 2025, 3(1): 20. doi: 10.1007/s44295-025-00069-0 [9] FILKIN T, LIPIN I, SLIUSARN. Integrating a UAV system based on Pixhawk with a laser methane mini detector to study methane emissions[J]. Drones, 2023, 7(10): 625. [10] 杨淼, 盛智彬, 王海文, 等. 小型观测级ROV四自由度运动控制系统研究[J]. 舰船科学技术, 2020, 42(19): 83-89.YANG M, SHENG Z B, WANG H W, et al. Research on four-degree-of-freedom motion control system of small observation-class ROV[J]. Ship Science and Technology, 2020, 42(19): 83-89. [11] 闫勋, 袁辉, 甄庆喆, 等. 基于Pixhawk开源飞控项目的无人艇开发[J]. 舰船科学技术, 2020, 42(5): 148-151.YAN X, YUAN H, ZHEN Q Z, et al. Development of unmanned surface vehicle based on Pixhawk open-source flight control project[J]. Ship Science and Technology, 2020, 42(5): 148-151. [12] 綦声波, 尹保安, 苏志坤. 基于模糊PID的小型ROV定深运动控制仿真[J]. 现代电子技术, 2020, 43(2): 20-23, 28. [13] 肖朋振, 刘爽. 小型有缆无人水下机器人控制系统设计[J]. 小型微型计算机系统, 2019, 40(2): 451-455. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 535
- HTML全文浏览量: 249
- PDF下载量: 157
- 被引次数: 0