

A Fault-Tolerant Navigation Algorithm for AUVs Based on Collaborative Fault Detection and Robust Estimation
-
摘要: 自主水下航行器(AUV)组合导航系统在面对多普勒测速仪(DVL)缓变故障时, 传统自适应滤波算法因噪声估计与故障检测机制相互冲突, 难以实现有效容错。为此, 文中提出一种融合长短期记忆(LSTM)网络故障检测与变分贝叶斯自适应卡尔曼滤波(VBAKF)/IGG-III抗差滤波的协同容错导航方法。该方法通过LSTM网络实现对缓变故障早期特征的有效识别; 在确认故障后将滤波器由VBAKF切换至IGG-III抗差滤波模式, 动态构造等价权矩阵以抑制故障量测影响; 故障结束后恢复VBAKF以维持最优估计。实验结果表明, 在DVL发生缓变故障时, 所提方法的导航精度优于几种主流滤波算法, 有效抑制了状态估计失真, 提升了AUV组合导航系统在不确定水下环境中的定位精度和鲁棒性。Abstract: In the integrated navigation system of autonomous undersea vehicles(AUVs), traditional adaptive filtering algorithms struggle to achieve effective fault tolerance against slowly varying faults of the Doppler velocity log(DVL) due to the conflict between noise estimation and fault detection mechanisms. To address this issue, this paper proposed a collaborative fault-tolerant navigation method fusing a long short-term memory(LSTM) network-based fault detection with a variational Bayesian adaptive Kalman filter(VBAKF) and IGG-III robust filtering. The proposed method utilized the LSTM network to effectively identify the early characteristics of slowly varying faults. Upon fault confirmation, the filter switched from the VBAKF to the IGG-III robust filtering mode and dynamically constructed equivalent weight matrices to suppress the influence of faulty measurements. After the fault ended, the VBAKF was restored to maintain optimal estimation. Experimental results demonstrate that in the event of DVL slowly varying faults, the proposed method achieves higher navigation accuracy than several mainstream filtering algorithms, effectively suppresses state estimation distortion, and enhances the positioning precision and robustness of the integrated navigation system of AUVs in uncertain underwater environments.
-
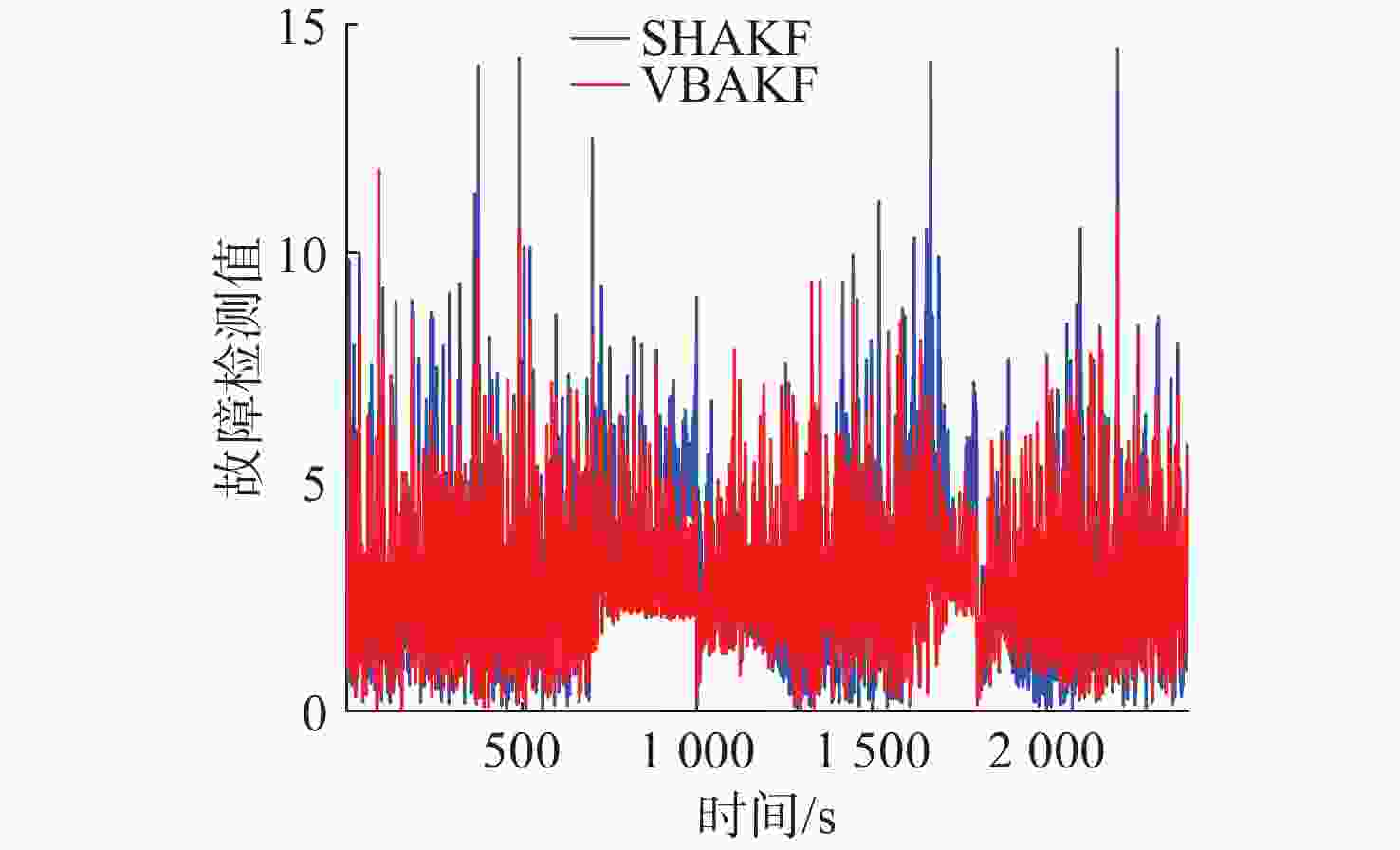
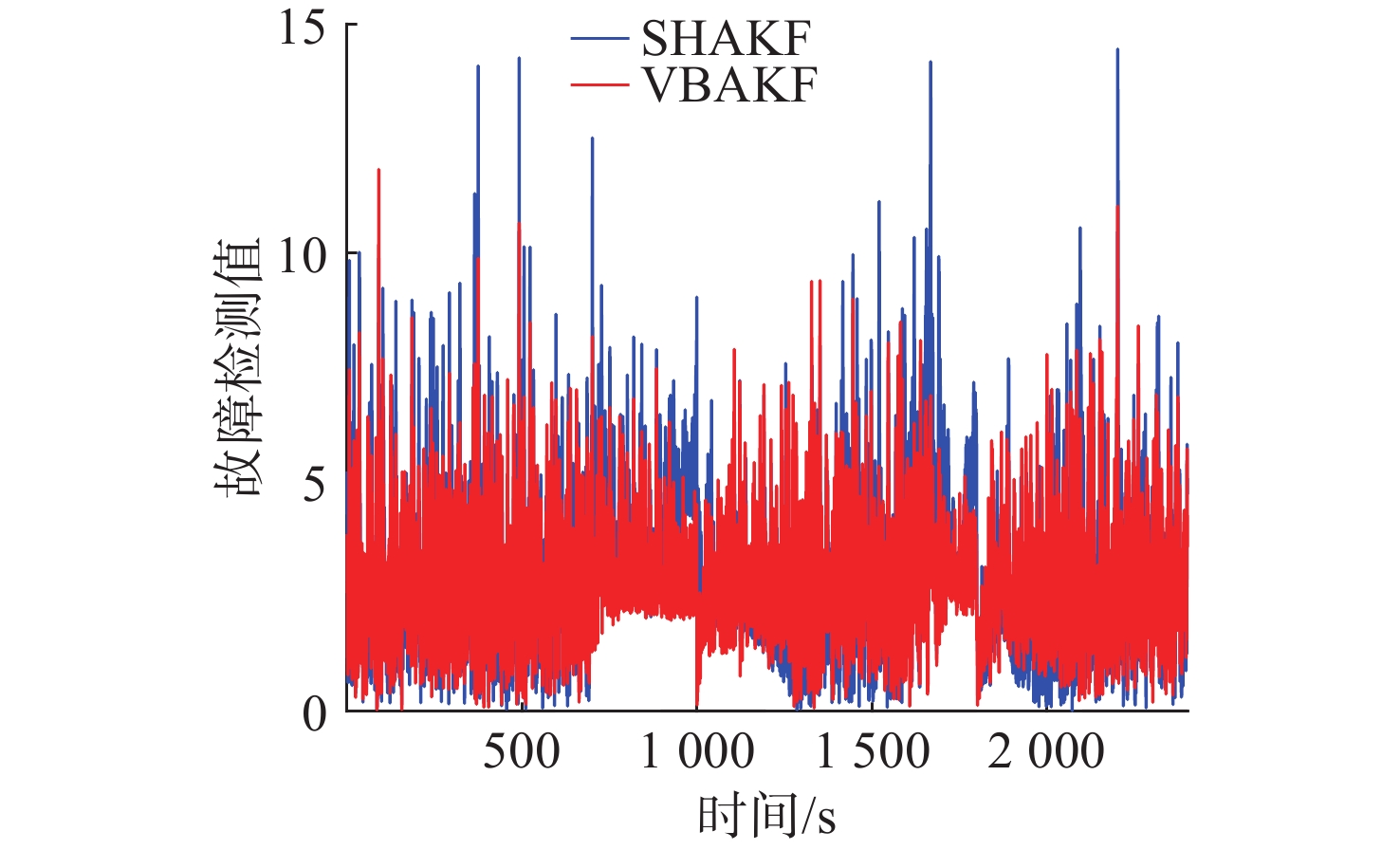
图 8 自适应滤波算法故障检测值曲线
Figure 8. Fault detection value curves of adaptive filtering algorithm
表 1 故障类型
Table 1. Type of faults
故障类型 数学模型 突变故障 $f(t)=5 r_0 n(t) $ 线性缓变故障 $f(t)=\alpha\left(t-t_0\right) n(t) $ 二次方缓变故障 $ f(t)=\alpha\left(t-t_0\right)^2 n(t) $ 周期性缓变故障 $ f(t)=\alpha \sin \left(t-t_0\right) n(t) $ 对数型缓变故障 $ f(t)=\alpha \ln \left(1+\left(t-t_0\right)\right) n(t) $  下载: 导出CSV
下载: 导出CSV
表 2 LSTM模型测试集评价指标
Table 2. Evaluation index of LSTM model test set
故障类型 精确率 召回率 F1分数 系统正常 0.976 6 0.967 2 0.971 9 突变故障 0.956 3 0.985 0 0.970 4 线性故障 0.858 9 0.843 2 0.851 0 二次方故障 0.902 8 0.910 7 0.906 7 周期性故障 0.987 4 0.993 7 0.990 5 对数型故障 0.916 1 0.902 5 0.909 3 算数平均 0.933 0 0.933 7 0.933 3 加权平均 0.933 4 0.933 7 0.933 5
下载: 导出CSV
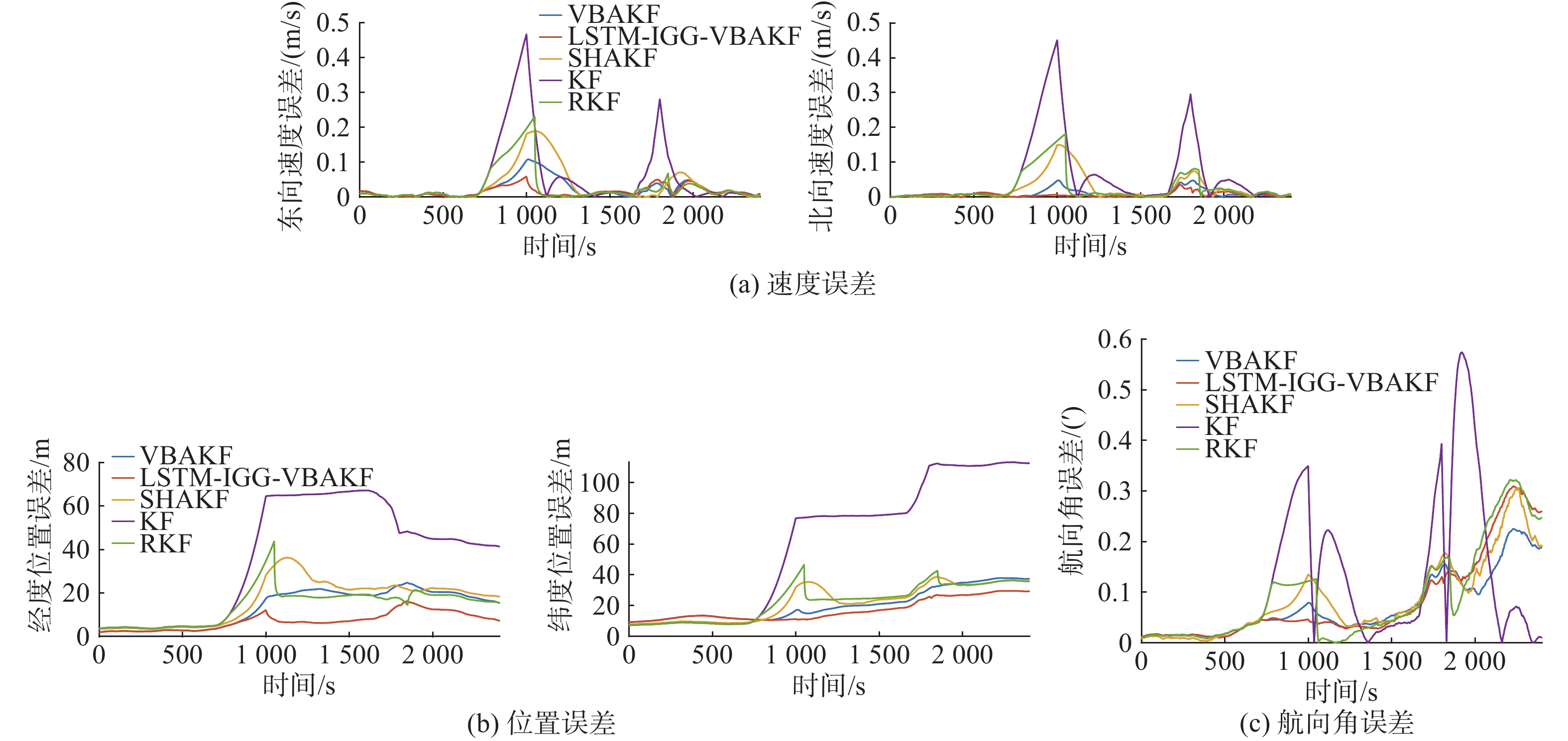
表 3 算法结果对比
Table 3. Comparison of algorithm results
算法 东向速度误差/(m/s) 北向速度误差/(m/s) 经度误差/m 纬度误差/m 航向角误差/(′) KF 0.112 1 0.113 4 44.98 74.34 0.18 RKF 0.054 8 0.048 7 16.55 25.45 0.13 SHAKF 0.060 8 0.044 0 19.44 24.87 0.11 VBAKF 0.035 2 0.015 3 15.86 22.82 0.09 LSTM-IGG-VBAKF 0.021 0 0.009 1 8.17 18.45 0.12
下载: 导出CSV
-
[1] 卢道华, 宋世磊, 王佳, 等. SINS/DVL水下组合导航技术发展综述[J]. 控制理论与应用, 2022, 39(7): 1159-1170. doi: 10.7641/CTA.2021.10229LU D H, SONG S L, WANG J. et al. Review on the development of SINS/DVL underwater integrated navigation technology[J]. Control Theory & Applications, 2022, 39(7): 1159-1170. doi: 10.7641/CTA.2021.10229 [2] 潘绍华, 徐晓苏, 张亮. 基于卡方检测和相关向量机的DVL异常信息处理机制[J]. 中国惯性技术学报, 2022, 30(4): 461-468. doi: 10.13695/j.cnki.12-1222/o3.2022.04.006 [3] 王立辉, 刘恩东, 吴璠, 等. Attention-GRU神经网络辅助的SINS/DVL组合导航算法[J]. 中国惯性技术学报, 2024, 32(6): 565-571. doi: 10.13695/j.cnki.12-1222/o3.2024.06.005 [4] LIU S, ZHANG T, ZHANG J, et al. A new coupled method of SINS/DVL integrated navigation based on improved dual adaptive factors[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-11. [5] ZHU Y, ZHANG M, ZHOU L, et al. A novel fault-tolerant information fusion method for integrated navigation systems based on fuzzy inference[J]. Sensors, 2025, 25(5): 1624. doi: 10.3390/s25051624 [6] ZHU T, LI J, DUAN K, et al. Study on the robust filter method of SINS/DVL integrated navigation systems in a complex underwater environment[J]. Sensors, 2024, 24(20): 6596. doi: 10.3390/s24206596 [7] SHI W, XU J, HE H, et al. Fault-tolerant SINS/HSB/DVL underwater integrated navigation system based on variational Bayesian robust adaptive Kalman filter and adaptive information sharing factor[J]. Measurement, 2022, 196: 111225. doi: 10.1016/j.measurement.2022.111225 [8] 徐天河, 王森, 代培培. UWB/INS紧组合变分贝叶斯自适应滤波算法[J]. 导航定位学报, 2025, 13(2): 1-8. doi: 10.16547/j.cnki.10-1096.20250201XU T H, WANG S, DAI P P. UWB/INS tightly coupled integration algorithm based on variational Bayesian adaptive Kalman filter[J]. Journal of Navigation and Positioning, 2025, 13(2): 1-8. doi: 10.16547/j.cnki.10-1096.20250201 [9] 赵宾, 曾庆化, 刘建业, 等. 基于平滑有界层的故障检测及抗差自适应滤波算法[J]. 中国惯性技术学报, 2023, 31(3): 245-253. [10] ZHU J, LI A, QIN F, et al. A hybrid method for dealing with DVL faults of SINS/DVL integrated navigation system[J]. IEEE Sensors Journal, 2022, 22(16): 15844-15854. doi: 10.1109/JSEN.2022.3189985 [11] 林雪原, 潘新龙, 李欣. GNSS/SINS组合导航系统的改进VBAKF算法[J]. 导航定位与授时, 2025, 12(5): 48-56. doi: 10.19306/j.cnki.2095-8110.2025.05.004LIN X Y, PAN X L, LI X. Modified VBAKF algorithm of GNSS/SINS integrated navigation system[J]. Navigation Positioning and Timing, 2025, 12(5): 48-56. doi: 10.19306/j.cnki.2095-8110.2025.05.004 [12] YANG H, LI B, GAO X, et al. Enhancing fault detection in AUV-integrated navigation systems: Analytical models and deep learning methods[J]. Journal of Marine Science and Engineering, 2025, 13(7): 1198. doi: 10.3390/jmse13071198 [13] ZHAO H, SUN S, JIN B. Sequential fault diagnosis based on LSTM neural network[J]. IEEE Access, 2018, 6: 12929-12939. doi: 10.1109/ACCESS.2018.2794765 [14] WANG L, SHE J, CUI B, et al. Mitigating integrity risk in SBAS positioning using enhanced IGGIII robust estimation[J]. Remote Sensing, 2025, 17(17): 3067. [15] 汪颖. 复杂海洋环境下SINS/DVL组合导航算法研究[D]. 长沙: 湖南大学, 2023. [16] 靳凯迪, 柴洪洲, 宿楚涵, 等. 基于可变遗忘因子的渐消记忆变分贝叶斯自适应滤波算法[J]. 北京航空航天大学学报, 2023, 49(11): 2989-2999. doi: 10.13700/j.bh.1001-5965.2021.0799JIN K D, CHAI H Z, SU C H, et al. Fading memory variational Bayesian adaptive filter based on variable attenuating factor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(11): 2989-2999. doi: 10.13700/j.bh.1001-5965.2021.0799 [17] SARKKA S, NUMMENMAA A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations[J]. IEEE Transactions on Automatic Control, 2009, 54(3): 596-600. doi: 10.1109/TAC.2008.2008348 [18] HARTIKAINEN S S J. Variational Bayesian adaptation of noise covariances in non-linear Kalman filtering[EB/OL]. (2013-02-04)[2025-01-04]. https://arxiv.org/abs/1302.0681. [19] 杨元喜. 抗差估计理论及其应用[M]. 北京: 八一出版社, 1993. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1183
- HTML全文浏览量: 210
- PDF下载量: 143
- 被引次数: 0
图(8) / 表(3)




