Multi-Ship Cooperative Search Method Based on Dynamic Voronoi Partitioning
-
摘要: 传统多舰协同检查搜索主要采用固定分区且未考虑目标规避, 存在发现概率低、贴近实战不足的问题。文章提出一种基于动态Voronoi分区与多源信息联合决策的多舰协同搜索方法, 该方法以贝叶斯概率框架为基础, 融合声呐探测模型与目标运动扩散模型, 构建并动态更新目标位置的概率分布图。通过Voronoi图自适应划分搜索区域, 为各舰船划定责任分区, 实现任务空间分布式部署, 可显著降低区域冗余覆盖, 同时消除搜索盲区。针对“探索-利用”策略的阶段化适配需求(前期侧重探索、后期侧重利用), 设计多源信息融合评分模型, 将目标存在概率、区域未搜索程度及局部信息熵纳入综合计算, 并构建权重随搜索进度调整机制, 使搜索策略随任务进程动态调整, 进而指导舰船确定最优搜索目标点。在目标主动规避的对抗场景下, 将所提方法与固定分区的“弓”字形面积覆盖法、粒子群最大概率航向优化法进行对比, 通过1 000次蒙特卡洛仿真表明, 所提方法在多舰协同搜索任务中能显著缩短发现目标时间, 提高统计意义上的发现目标概率, 在对抗环境下具备良好的真实性与可扩展性。Abstract: Traditional multi-ship cooperative inspection search mainly employs fixed partitioning and fails to consider target evasion, resulting in low detection probability and insufficient alignment with actual combat. This paper proposed a multi-ship cooperative search method based on dynamic Voronoi partitioning and multi-source information joint decision-making. Based on a Bayesian probability framework, the method fused a sonar detection model and a target motion diffusion model to construct and dynamically update the probability distribution map of the target’s location. By adaptively dividing the search area using Voronoi diagrams, the method defined responsibility zones for each ship and realized distributed deployment in the task space, which significantly reduced redundant area coverage and eliminated search blind spots. To address the phased adaptation requirements of the “exploration and exploitation” strategy (focusing on exploration in the early stage and exploitation in the later stage), a multi-source information fusion scoring model was designed. This model incorporated target presence probability, degree of unsearched area, and local information entropy into a comprehensive calculation. Furthermore, a mechanism for adjusting weights according to search progress was constructed to dynamically adjust the search strategy with the task process, thereby guiding ships to determine optimal search target points. In adversarial scenarios with active target evasion, the proposed method was compared with the fixed-partition “zigzag”-type area coverage method and the particle swarm maximum probability heading optimization method. Results from 1 000 Monte Carlo simulations indicate that the proposed method significantly shortens the time to discover the target in multi-ship cooperative search tasks and improves the target detection probability in a statistical sense, demonstrating good realism and scalability in adversarial environments.
-
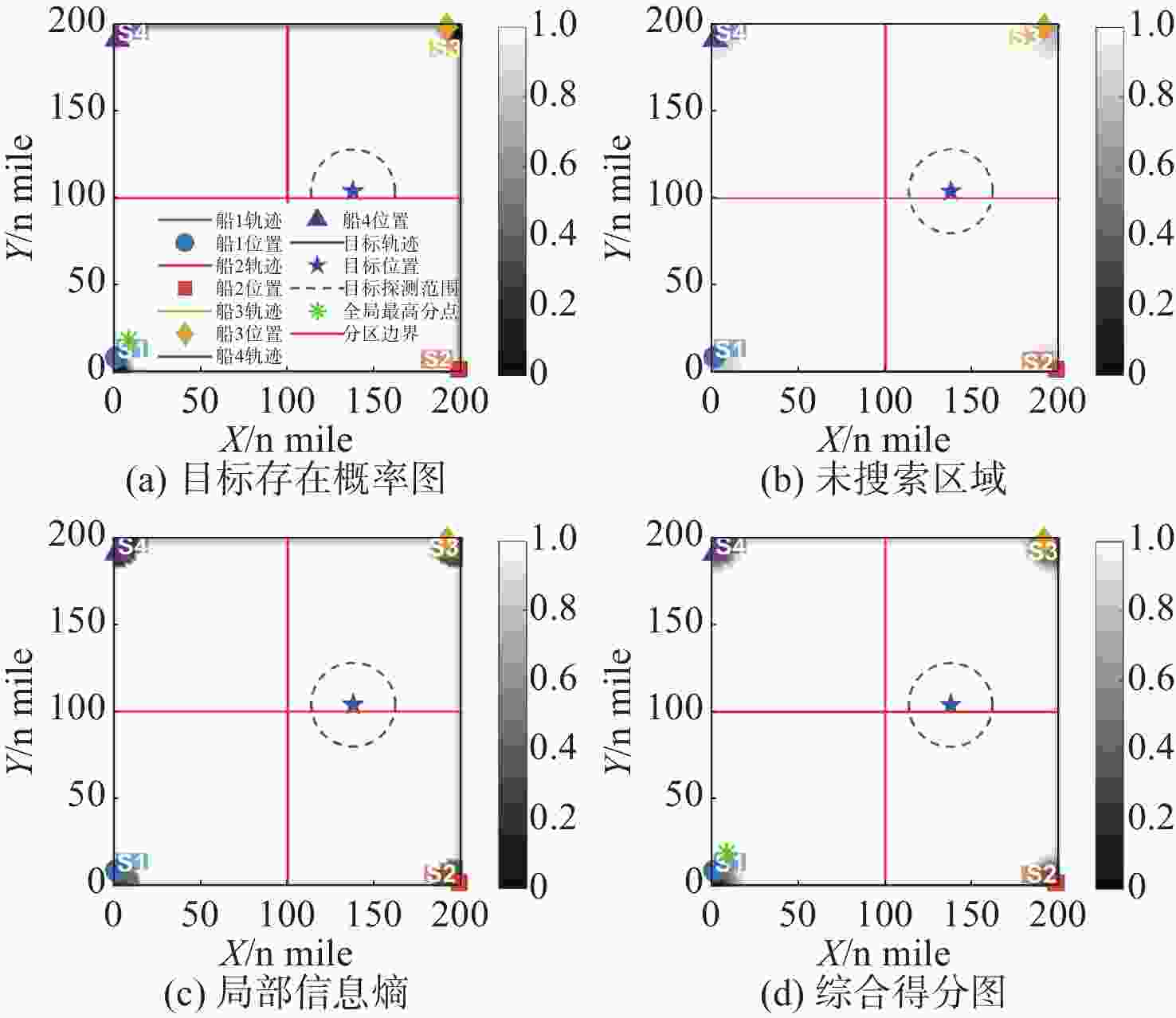
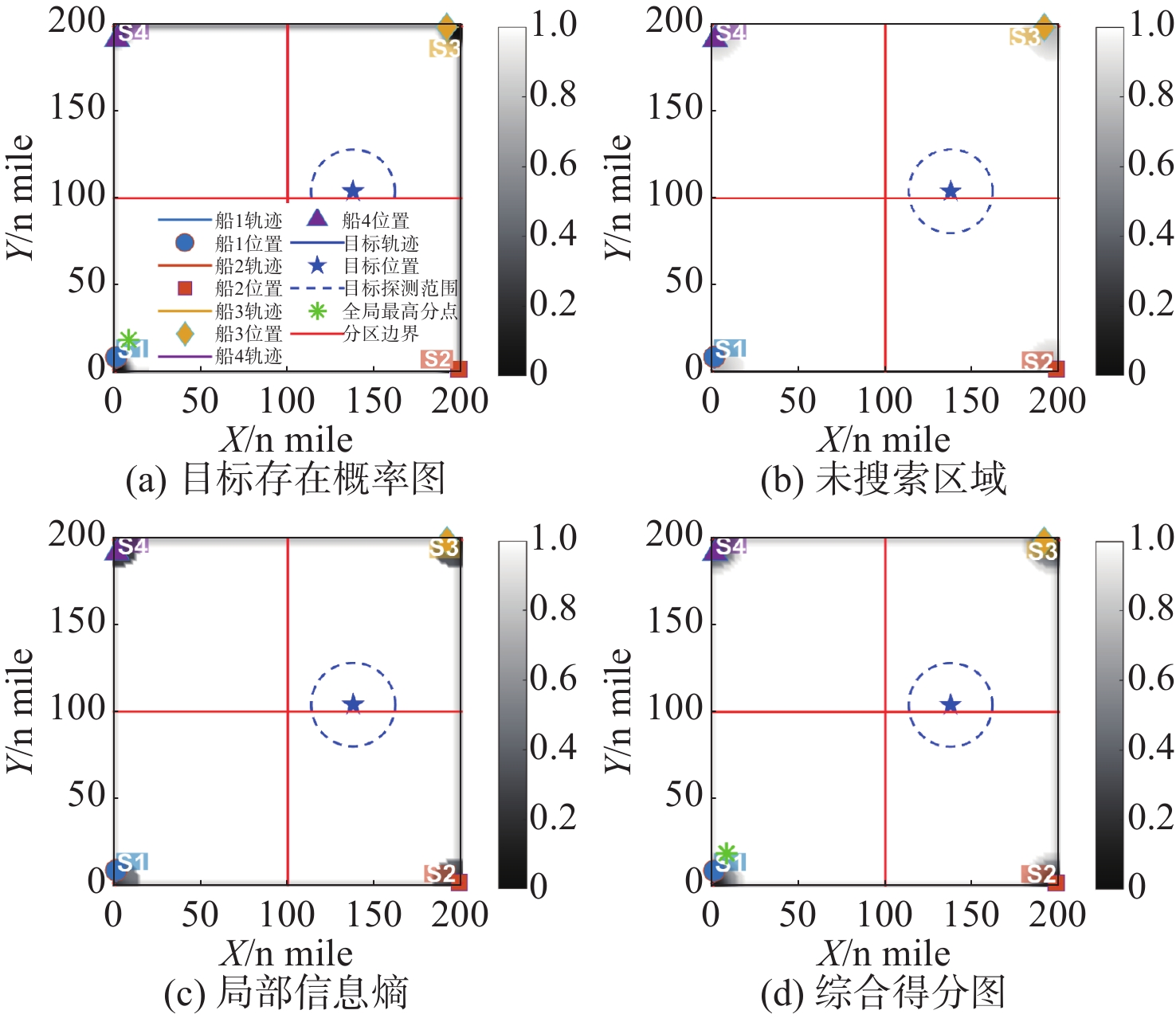
图 2 $ t=0.5 $ h搜索态势图(Pjoint=0.00)
Figure 2. Search situation map at t=0.5 h (Pjoint=0.00)
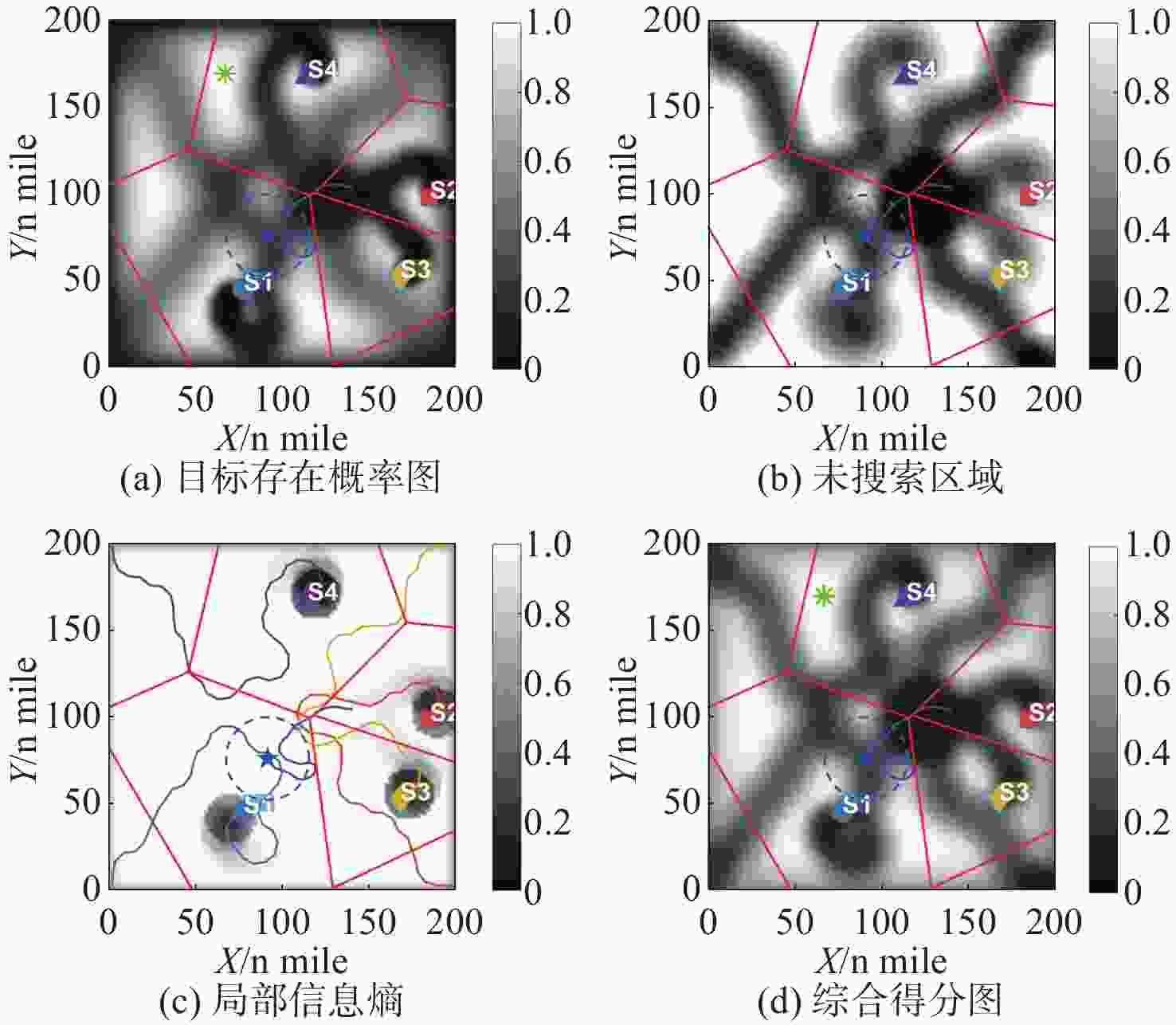
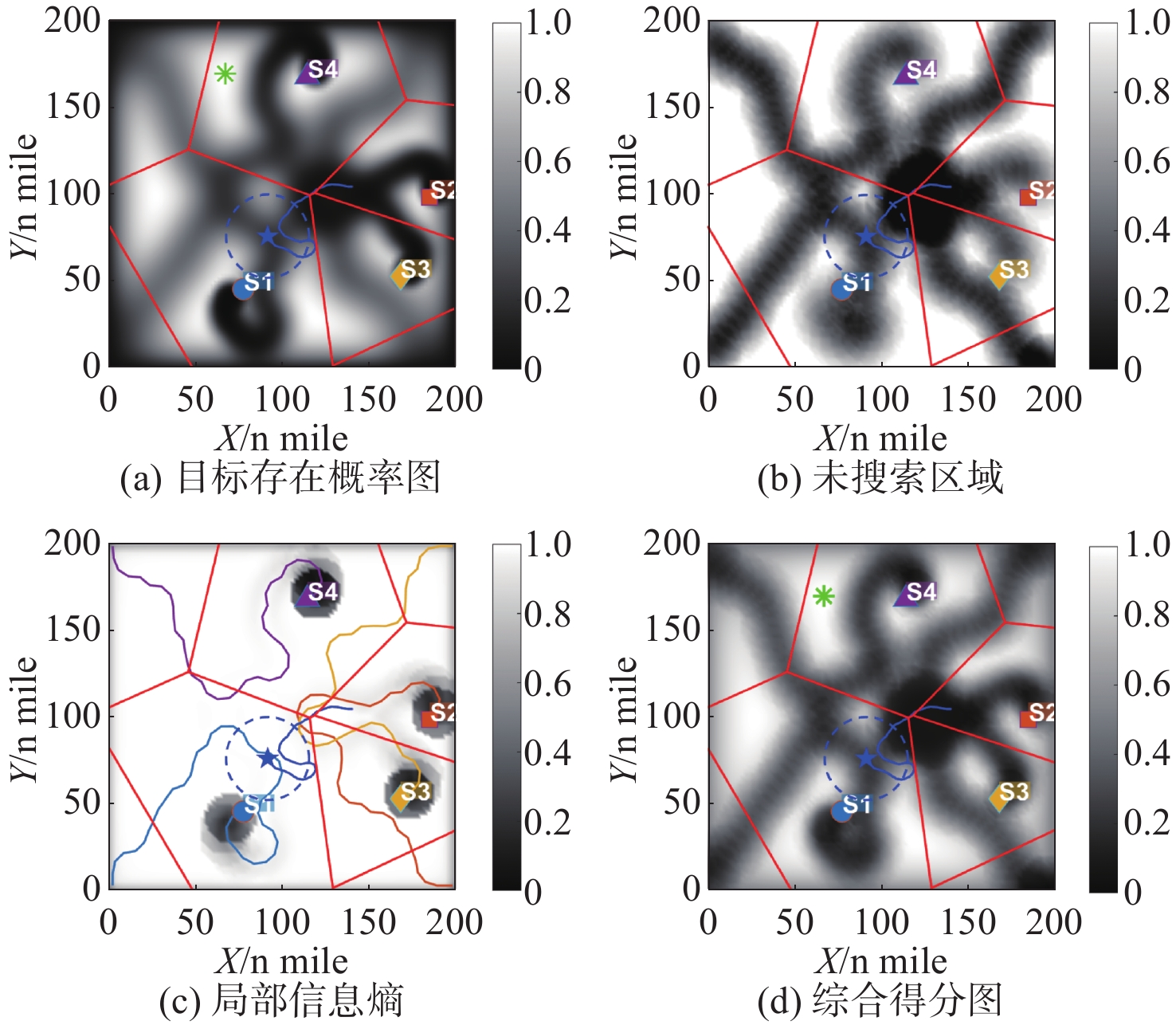
图 3 $ t=20 $ h搜索态势图(Pjoint=0.00)
Figure 3. Search situation map at t=20 h (Pjoint=0.00)
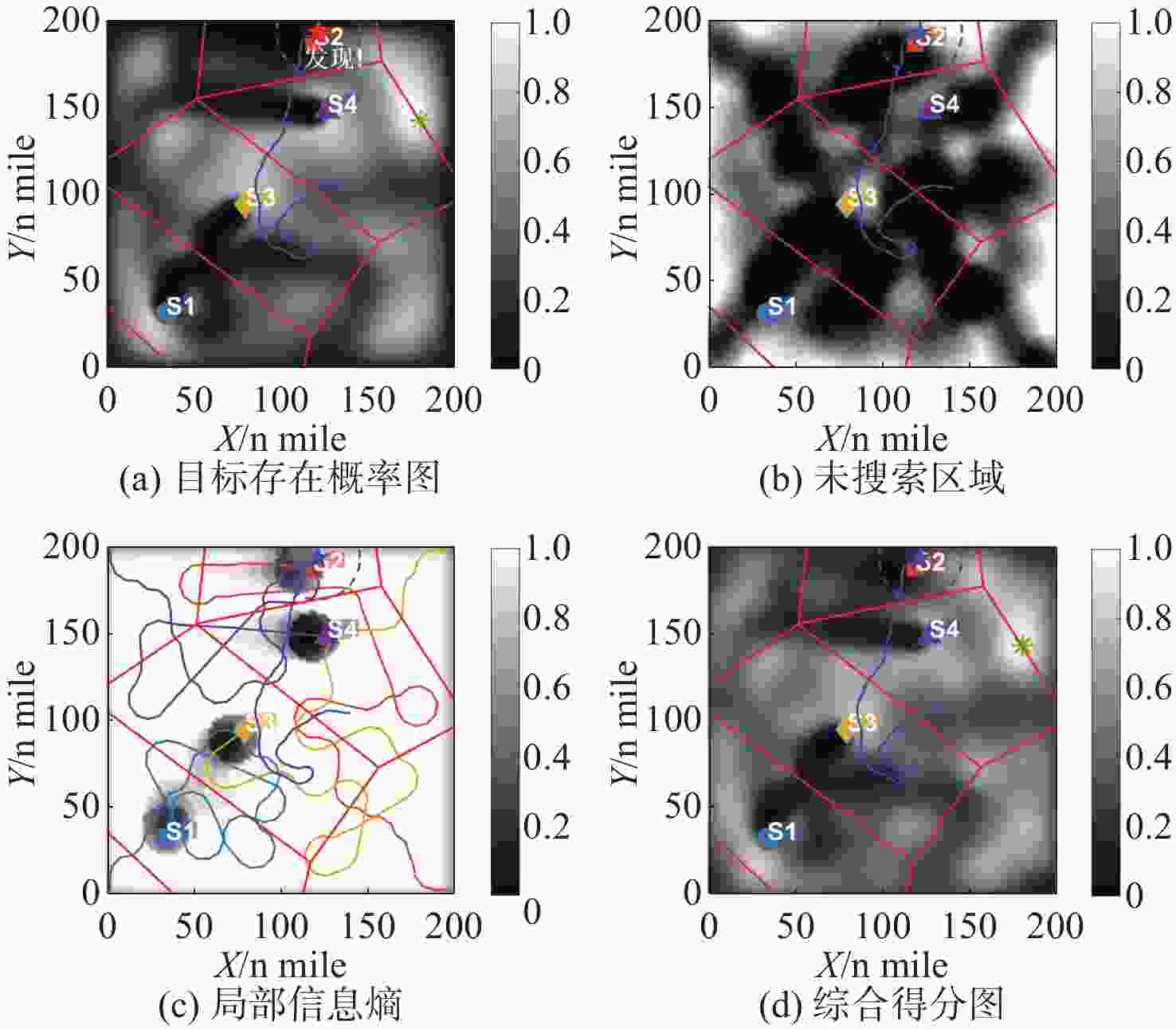
图 4 $ t=41 $ h搜索态势图(Pjoint=1.00)
Figure 4. Search situation map at t=41 h (Pjoint=1.00)
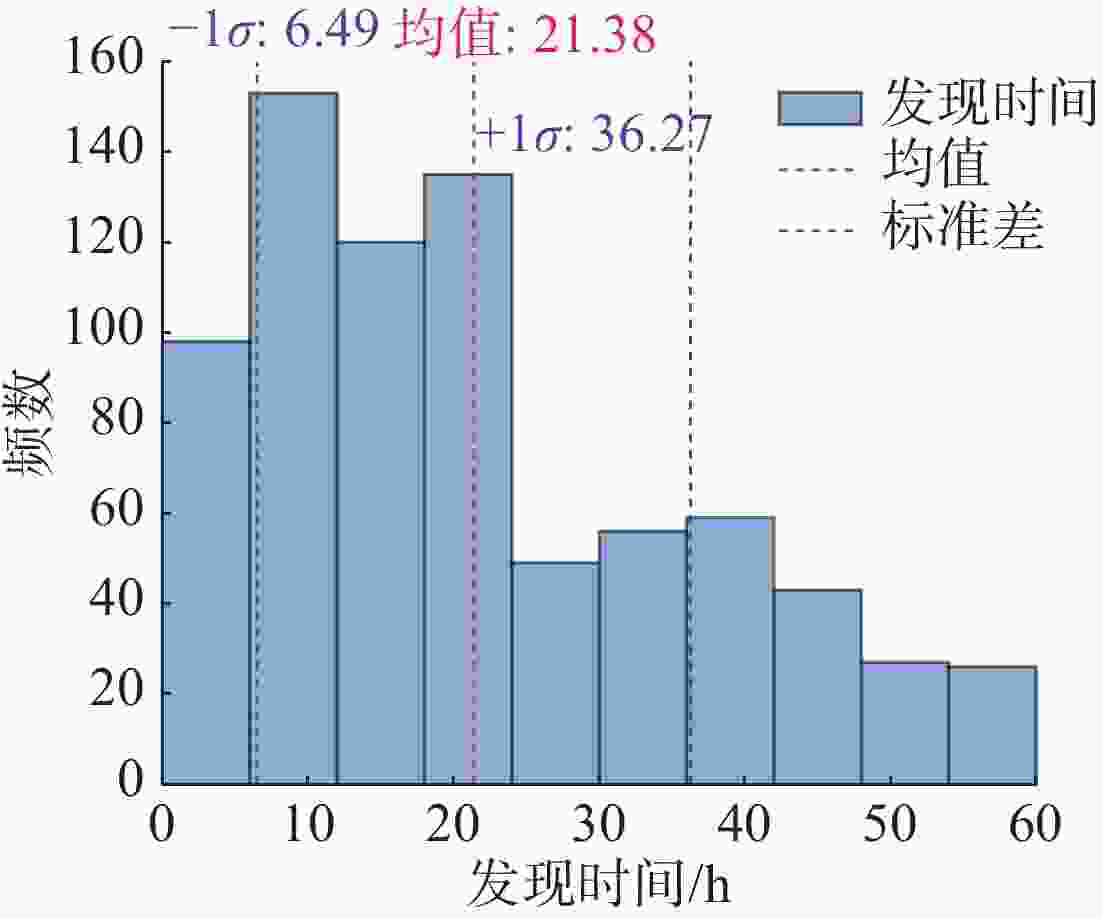
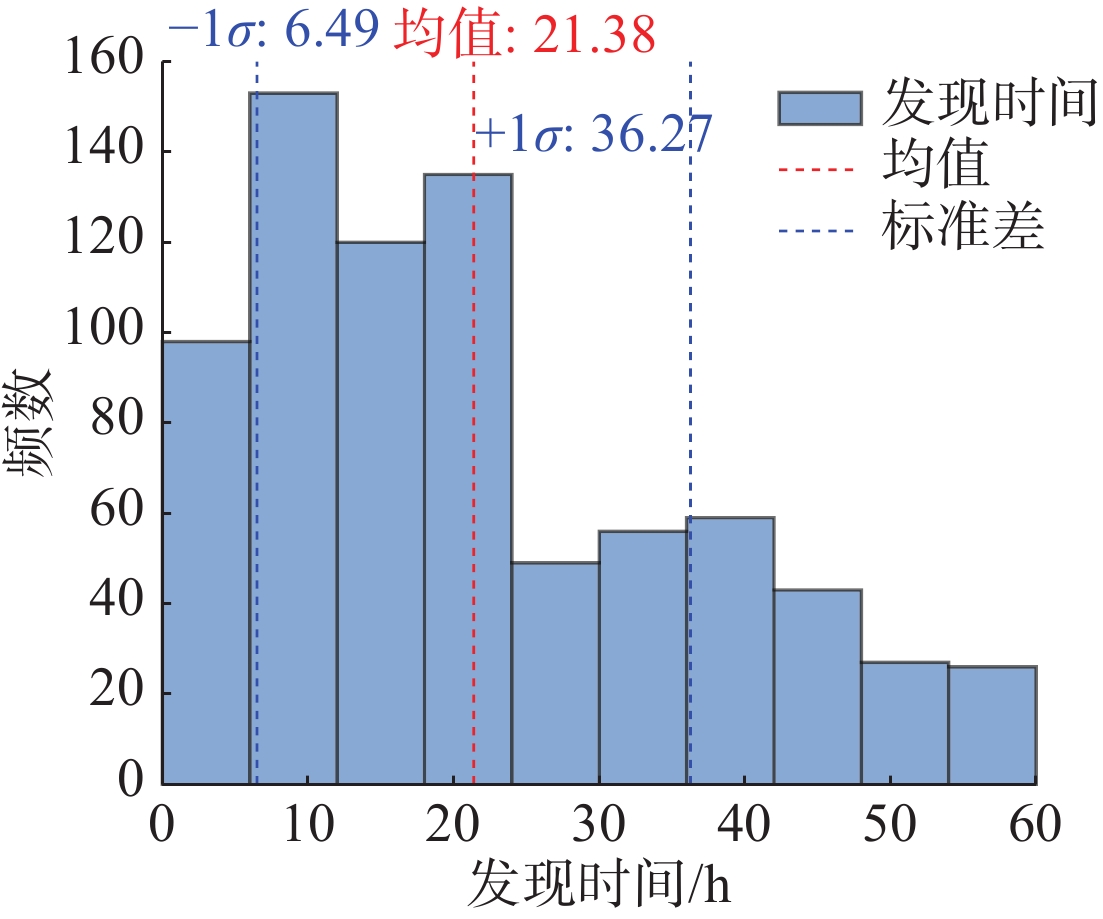
图 8 所提方法发现目标时间分布
Figure 8. Time distribution of target detection by the proposed method
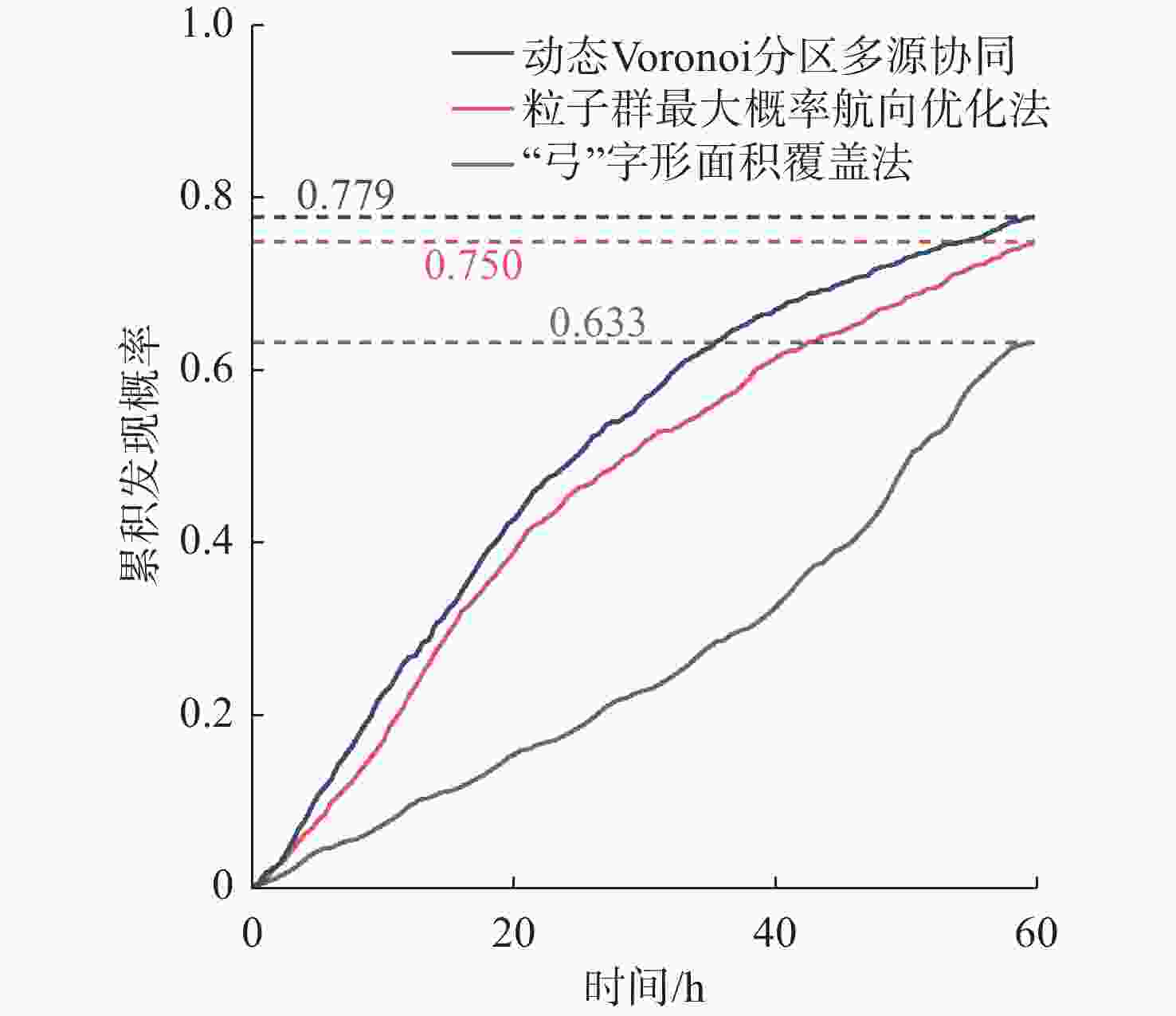
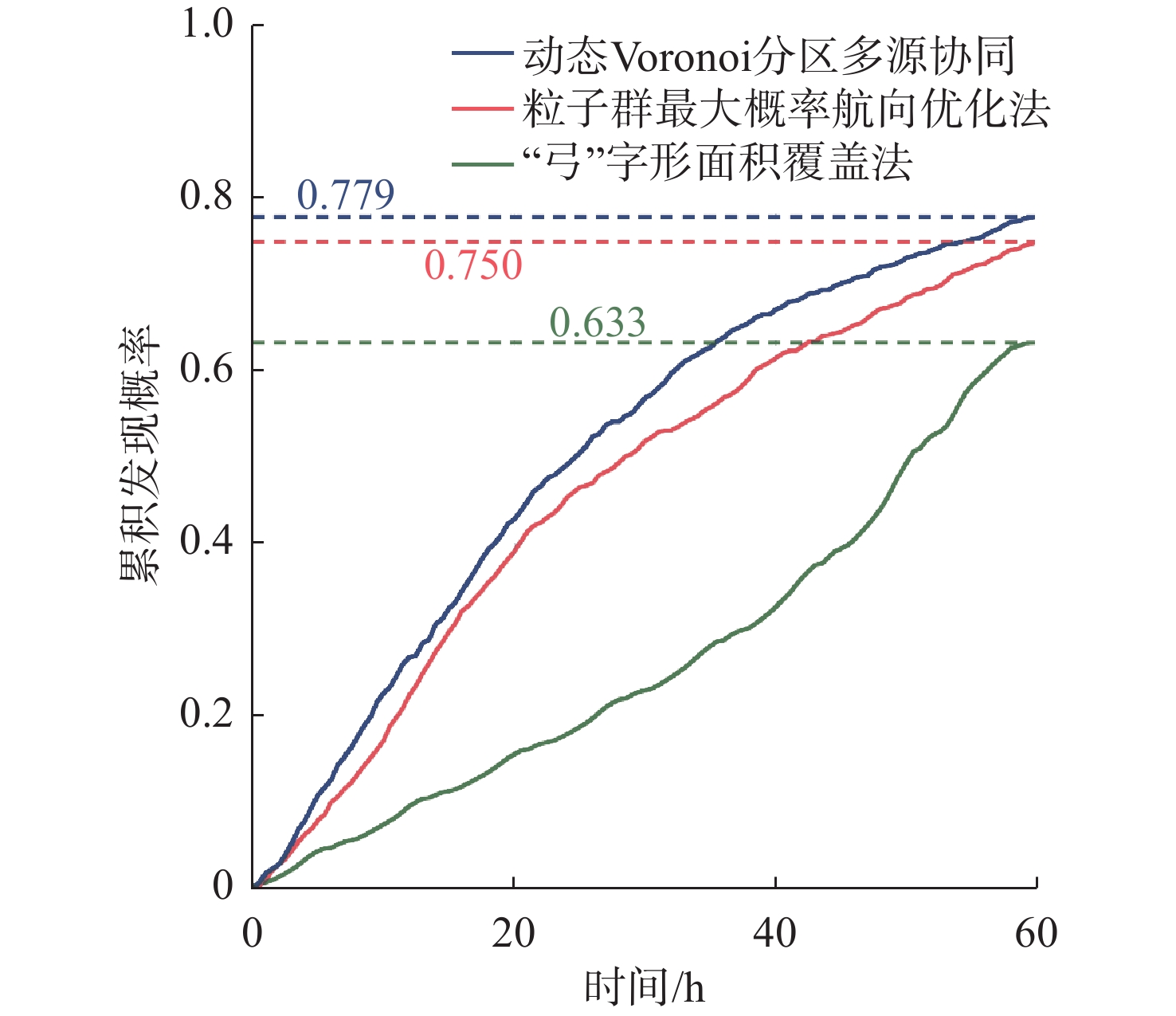
图 9 不同搜索策略累积发现概率随时间变化曲线
Figure 9. Time varying curves of cumulative discovery probability for different search strategies
表 1 不同搜索策略对比情况
Table 1. Comparison of different search strategies
策略 发现
概率/%平均发现
时间/h平均每次
运行时间/s动态Voronoi分区多源协同 77.9 21.4 3.88 粒子群最大概率航向优化法 75.0 23.4 45.93 “弓”字形面积覆盖法 63.3 35.0 0.001  下载: 导出CSV
下载: 导出CSV
-
[1] 王磊, 吴福初. 基于线列阵声纳的水面舰艇检查搜潜仿真[J]. 火力与指挥控制, 2011, 36(11): 91-95.WANG L, WU F C. Discussion about the efficiency of surface ships checking antisubmarine which using sonar buoy[J]. Fire Control & Command Control, 2011, 36(11): 91-95. [2] 高永琪, 马威强, 张林森, 等. 分布式AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44(5): 1674-1675.GAO Y Q, MA W Q, ZHANG L S, et al. Distributed multi-AUVs cooperative search method[J]. Systems Engineering and Electronics, 2022, 44(5): 1674-1675. [3] 冯西安, 寇思玮, 岳玲. 水下移动平台网络化协同探测技术发展[J]. 应用声学, 2019, 38(4): 1674-1675. doi: 10.11684/j.issn.1000-310X.2019.04.006FENG X A, KOU S W, YUE L. Development of networked collaborative detection technology for underwater mobile platforms[J]. Journal of Applied Acoustics, 2019, 38(4): 1674-1675. doi: 10.11684/j.issn.1000-310X.2019.04.006 [4] 付乐乐, 陈宏, 巩伟杰. 基于改进蚁群算法的水下机器 人路径规划[J]. 自动化与仪表, 2022, 37(4): 46-50. doi: 10.3969/j.issn.1009-0134.2022.12.039FU L L, CHEN H, GONG W J. Path planning of underwater robots based on improved ant colony algorithm[J]. Automation & Instrumentation, 2022, 37(4): 46-50. doi: 10.3969/j.issn.1009-0134.2022.12.039 [5] 邹佳运, 曲泓玥, 陈志鹏. 大规模水下滑翔机集群区域覆盖探测路径规划[J]. 水下无人系统学报, 2021, 29(1): 23-29. doi: 10.11993/j.issn.2096-3920.2021.01.004ZOU J Y, QU H Y, CHEN Z P. Path planning of a large-scale underwater glider swarm area coverage detection[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 23-29. doi: 10.11993/j.issn.2096-3920.2021.01.004 [6] 王飞, 陈芳香. 基于多目标粒子群算法的水面舰艇编队搜潜阵型参数优化方法[J]. 声学与电子工程, 2025, 158(2): 7-11.WANG F, CHEN F X. Optimization method for anti-submarine formation parameters of surface ship formation based on multi-objective particle swarm algorithm[J]. Acoustics and Electronics Engineering, 2025, 158(2): 7-11. [7] JIA Q, XU H. Research on cooperative area search of multiple underwater robots based on the prediction of initial target information[J]. Ocean Engineering, 2019, 172: 660-670. doi: 10.1016/j.oceaneng.2018.12.035 [8] 廖燕荣, 姜可宇. 多舰协同分区搜潜动态航路规划[J]. 舰船电子工程, 2022, 42(7): 23-27. doi: 10.3969/j.issn.1672-9730.2022.07.007LIAO Y R, JIANG K Y. Dynamic route planning of partitioned searching of multiple surface ships[J]. Ship Electronic Engineering, 2022, 42(7): 23-27. doi: 10.3969/j.issn.1672-9730.2022.07.007 [9] 陈捷, 刘海颖, 李志豪, 等. 基于改进Voronoi图的集群无人机区域覆盖方法[J]. 电子设计工程, 2023, 31(6): 31-32.CHEN J, LIU H Y, LI Z H, et al. Multi-UAV area coverage method based on improved Voronoi diagram[J]. Electronic Design Engineering, 2023, 31(6): 31-32. [10] 彭辉, 沈林成, 霍霄华. 多UAV协同区域覆盖搜索研究[J]. 系统仿真学报, 2007, 19(11): 2472-2476. doi: 10.3969/j.issn.1004-731X.2007.11.022PENG H, SHEN L C, HUO X H. Research on multiple UAV cooperative area coverage searching[J]. Journal of System Simulation, 2007, 19(11): 2472-2476. doi: 10.3969/j.issn.1004-731X.2007.11.022 [11] 高永琪, 王鹏, 马威强, 等. 改进头脑风暴算法在多AUV协同搜索动态目标中的应用[J]. 国防科技大学学报, 2024, 46(6): 203-209.GAO Y Q, WANG P, MA W Q, et al. Application of improved brain storm optimization algorithm in multi-AUV cooperative search moving targets[J]. Journal of National University of Defense Technology, 2024, 46(6): 203-209. [12] 赵苗, 高永琪, 吴笛霄, 等. 复杂海战场环境下AUV全 局路径规划方法[J]. 国防科技大学学报, 2021, 43(1): 41-48. doi: 10.11887/j.cn.202101006ZHAO M, GAO Y Q, WU D X, et al. AUV global path planning method in complex sea battle field environment[J]. Journal of National University of Defense Technology, 2021, 43(1): 41-48. doi: 10.11887/j.cn.202101006 [13] 张美燕, 蔡文郁. 基于多AUV间任务协作的水下多目标探测路径规划[J]. 传感技术学报, 2018, 31(7): 1102-1106.ZHANG M Y, CAI W Y. Underwater targets tracking path planning based on task cooperation of multiple AUVs[J]. Chinese Journal of Sensors and Actuators, 2018, 31(7): 1101-1107. [14] 黄杰, 孙伟, 高渝. 双属性概率图优化的无人机集群协同目标搜索[J]. 系统工程与电子技术, 2020, 42(1): 118-127. doi: 10.3969/j.issn.1001‐506X.2020.01.16HUANG J, SUN W, GAO Y. Cooperative searching for the multi-UAVs based on dual-attribute probabilistic model optimization[J]. Systems Engineering and Electronics, 2020, 42(1): 118-127. doi: 10.3969/j.issn.1001‐506X.2020.01.16 [15] 张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41(5): 220-232.ZHANG Z X, LONG T, XU G T, et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving target[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 220-232. [16] 张宁, 寇小明, 李斌, 等. 基于遗传算法的应召搜潜路径优化[J]. 水下无人系统学报, 2023, 31(2): 244-251. doi: 10.11993/j.issn.2096-3920.2022-0002ZHANG N, KOU X M, LI B, et al. Route optimization of on call submarine search based on genetic algorithm[J]. Journal of Unmanned Undersea Systems, 2023, 31(2): 244-251. doi: 10.11993/j.issn.2096-3920.2022-0002 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 315
- HTML全文浏览量: 152
- PDF下载量: 147
- 被引次数: 0