Optimized Smith Predictor Combined with HCOPSO Algorithm for Unman Surface Vessel Heading Control
-
摘要: 高速无人艇(USV)航向控制中, 同时存在前向通道与反馈回路的时滞环节, 并且具有较大的延迟/动态时间比, 显著降低航向控制性能。传统Smith预估器虽能有效补偿前向通道时滞, 但未考虑反馈回路的时滞。为此, 文中将反馈回路时滞纳入Smith预估器设计, 构建包含双向时滞的预测模型, 同时补偿前向通道与反馈回路的时滞, 减少双向时滞的系统相位裕度侵蚀。进一步, 引入混合均值中心反向学习粒子群优化(HCOPSO)算法进行比例-积分-微分(PID)控制器参数寻优整定, 该算法在迭代前期利用均值中心反向学习策略扩大搜索范围, 后期通过自适应压缩因子实现精细寻优, 兼具全局探索与局部开发的优势, 有效解决寻优过程的局部最优解问题。基于USV航向模型进行了仿真测试, 结果表明, 改进Smith预估PID控制器相较于常规PID控制器、传统Smith预估PID控制器, 系统的超调量和调节时间均得到了改善, 稳态误差小于0.1°; 并且当改进Smith预估补偿模型存在误差时, 系统依然能够保持良好的动态性能与稳态精度。同时, 针对改进Smith预估PID控制器, 进一步对比分析了HCOPSO算法与粒子群优化(PSO)算法、遗传算法(GA)和鲸鱼优化算法(WOA)的航向控制性能。结果表明, HCOPSO算法获得的时间加权绝对误差积分(ITAE)指标较PSO、GA和WOA算法分别降低了55.38%、22.47%和24.63%, 并表现出较强的扰动抑制能力与航向保持能力, 验证了其有效性。Abstract: In the heading control of a high-speed unmanned surface vessel(USV), there are time delay elements in both the forward channel and the feedback loop. Moreover, it has a large delay/dynamic time ratio, significantly reducing the performance of heading control. Conventional Smith predictors can only effectively compensate for time delays in the forward channel and are ineffective against time delays in the feedback loop. In this paper, the time delay in the feedback loop was incorporated into the design of the Smith predictor, constructing a predictive model that incorporated time delays in both directions. This approach allowed for simultaneous compensation of time delays in both the forward channel and feedback loop, thereby significantly reducing the erosion of the system’s phase margin caused by bidirectional time delays. Furthermore, a hybrid mean center opposition-based learning particle swarm optimization(HCOPSO) algorithm was introduced for the parameter tuning of the proportional-integral-derivative(PID) controller. This algorithm employed a mean center opposition-based reverse learning strategy in the early stages of iteration to expand the search range and utilized an adaptive compression factor in the later stages for fine-tuning. Therefore, it combined the advantages of both global exploration and local exploitation, effectively solving the problem of local optimal solutions in the optimization process. Simulation tests were conducted based on the USV heading model. The results demonstrate that the improved Smith predictor-based PID controller shows significant improvements in system overshoot and settling time compared to conventional PID controllers and traditional Smith predictor-based PID controllers, with a steady-state error of less than 0.1°. When the compensation model of the improved Smith predictor contains parameter deviations, the system can still maintain good dynamic stability and steady-state accuracy. Meanwhile, for the Smith predictor-based PID controller, the navigation control performance of the HCOPSO algorithm was further compared and analyzed with that of the particle swarm optimization(PSO) algorithm, genetic algorithm(GA), and whale optimization algorithm(WOA). The results show that the integral of time-weighted absolute error(ITAE) index obtained by the HCOPSO algorithm is 55.38%, 22.47%, and 24.63% lower than that of the PSO algorithm, GA, and WOA, and it demonstrates strong disturbance suppression ability and heading stability ability, verifying its effectiveness.
-
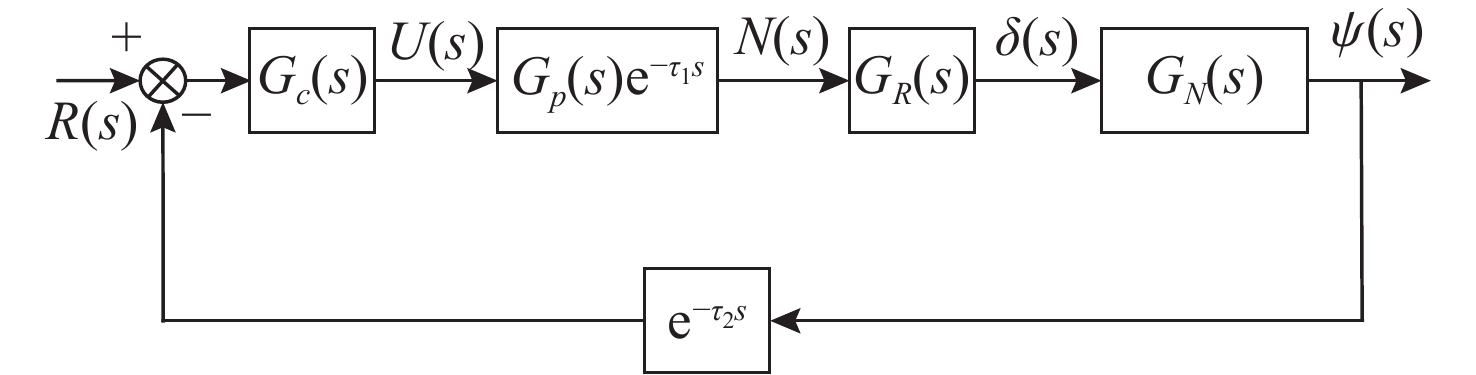
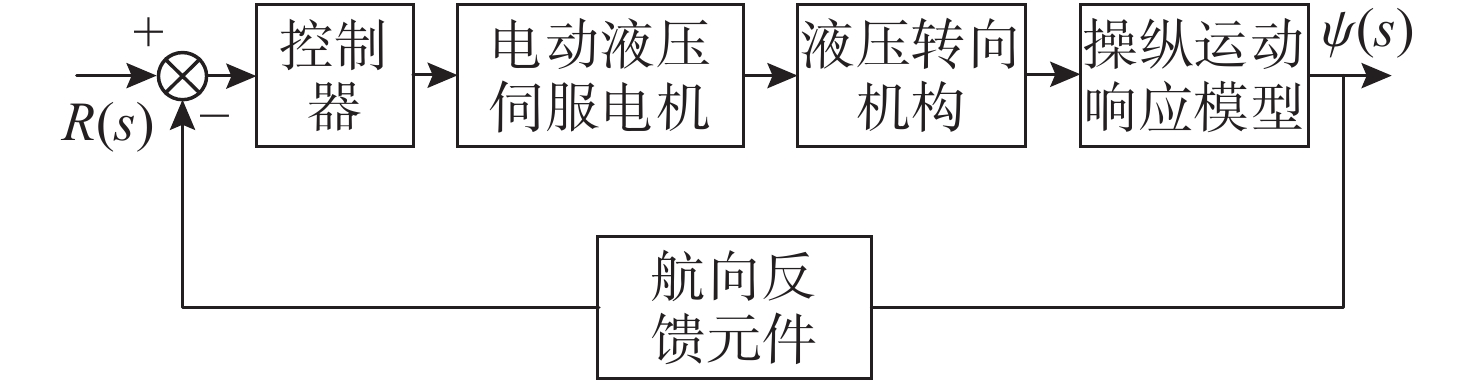
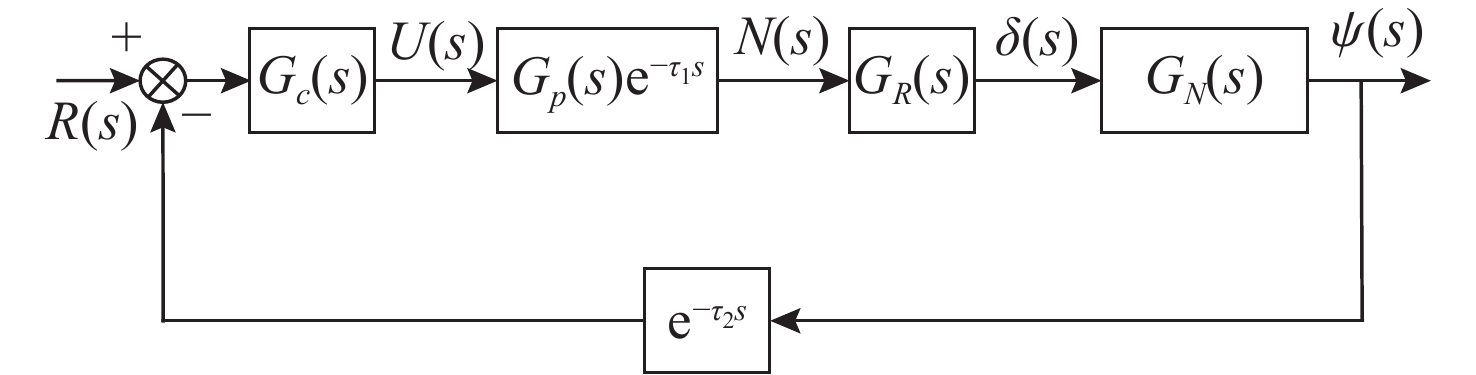
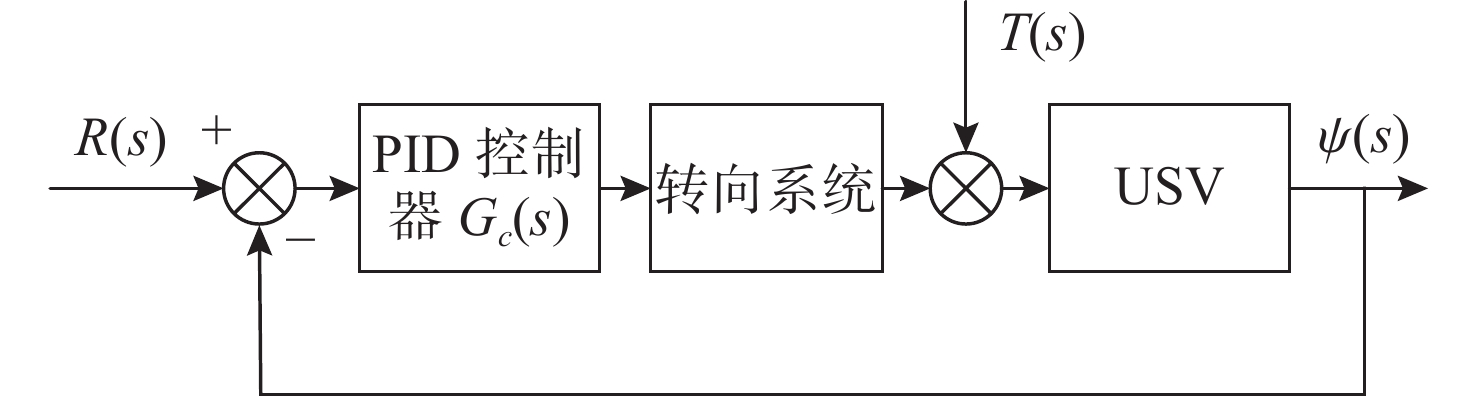
图 2 闭环航向控制系统理论简化模型
Figure 2. Theoretical simplified model of closed-loop heading control system
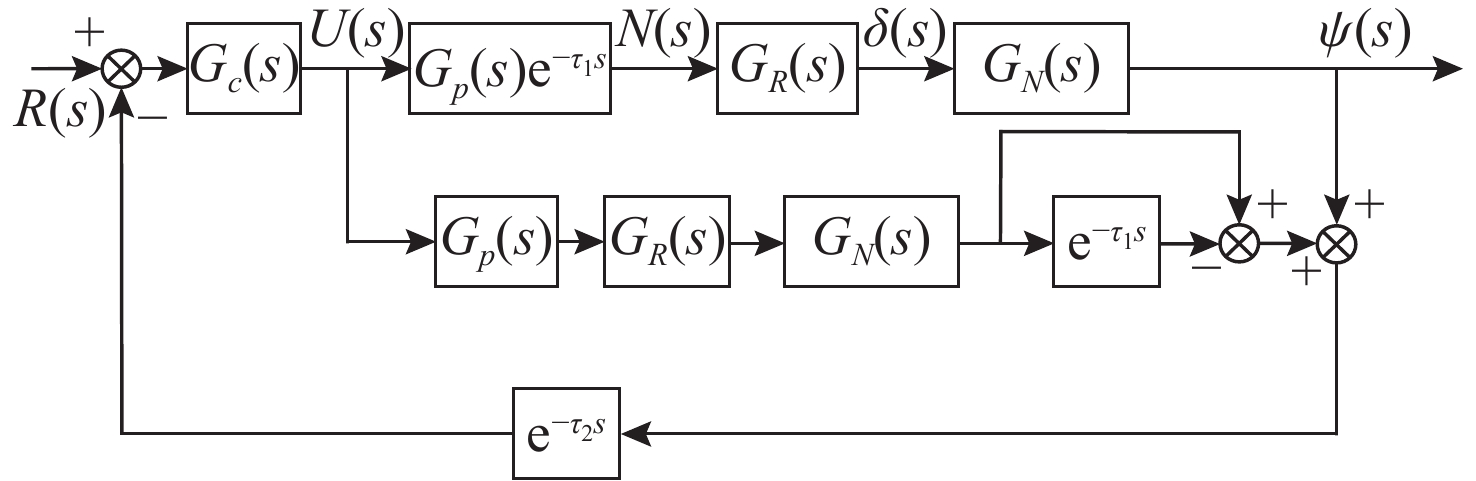
图 3 引入传统Smith预估器的闭环航向控制系统
Figure 3. Closed-loop heading control system with traditional Smith predictor

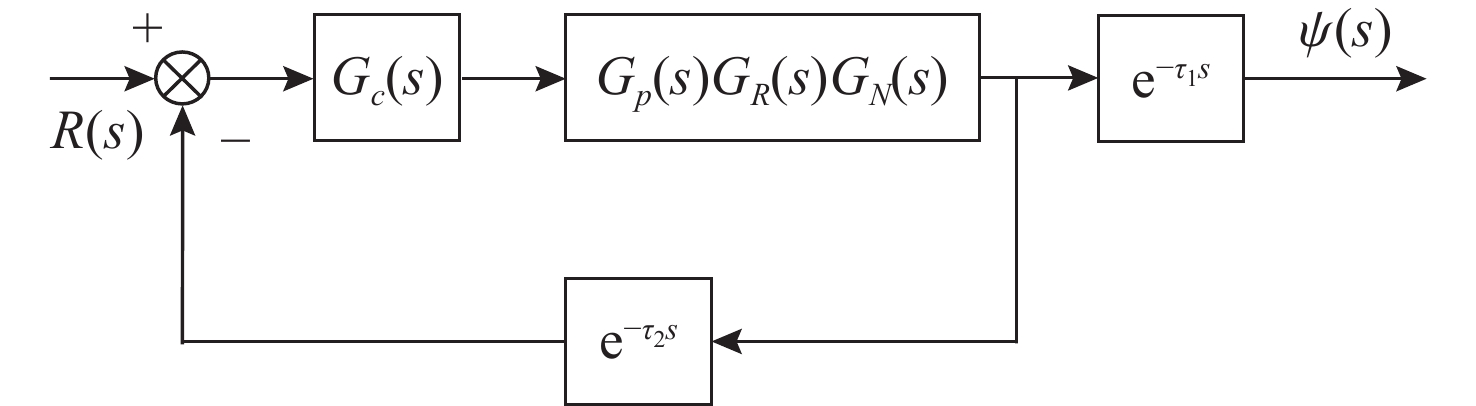
图 4 引入传统Smith预估器的等效闭环航向控制系统
Figure 4. Equivalent closed-loop heading control system with traditional Smith predictor
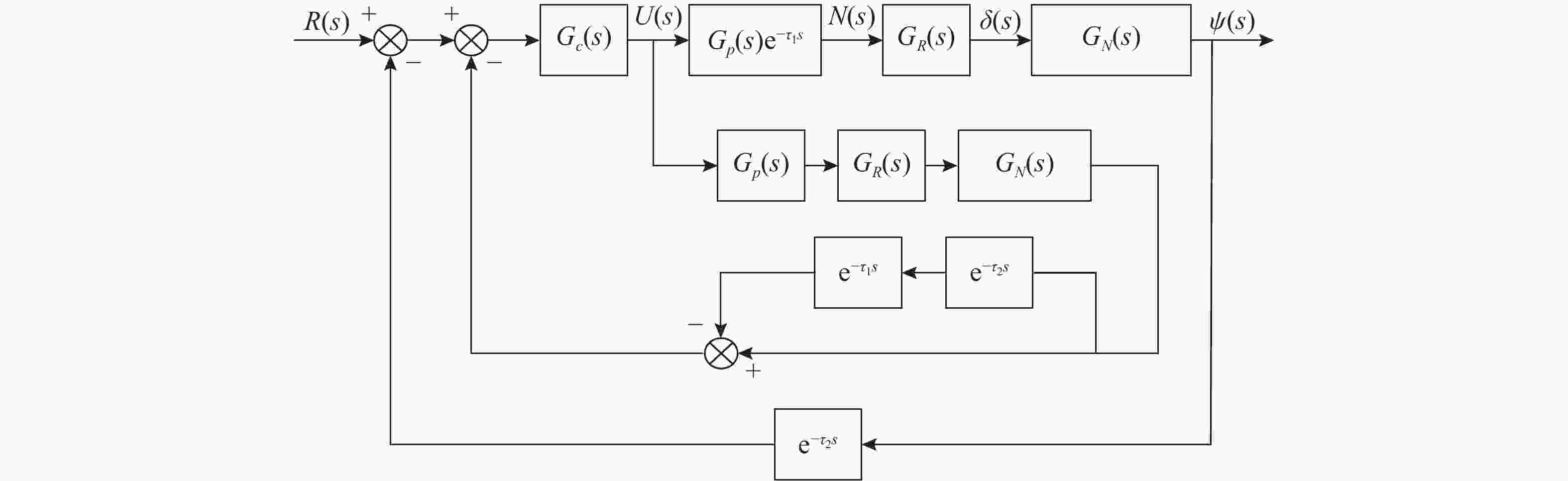
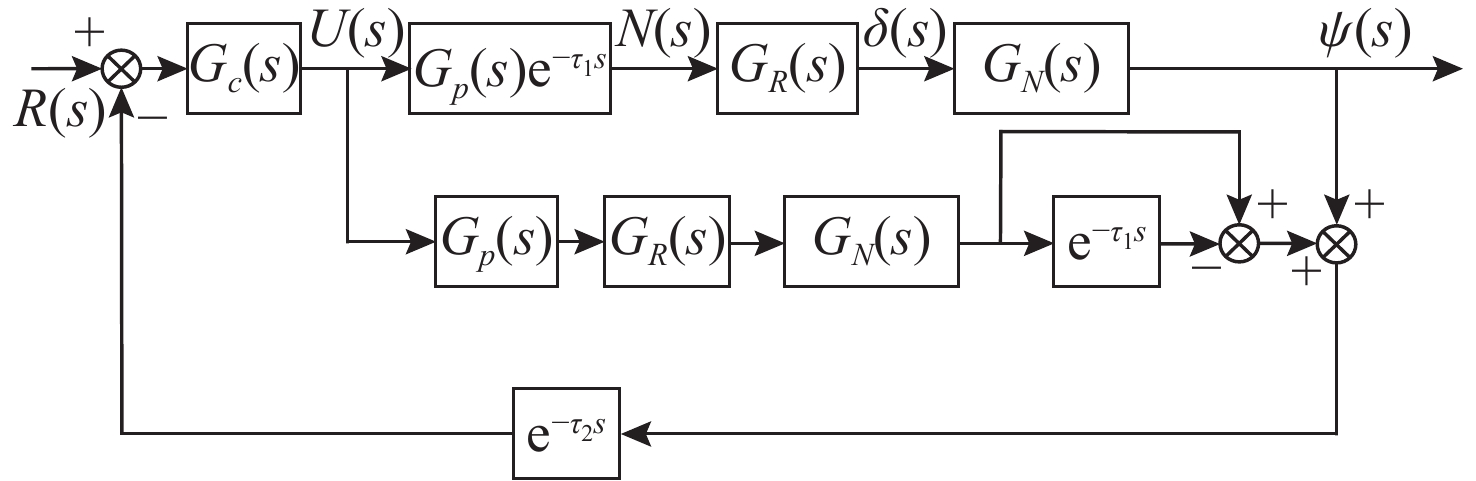
图 5 引入改进Smith预估器的闭环航向控制系统
Figure 5. Closed-loop heading control system with optimized Smith predictor

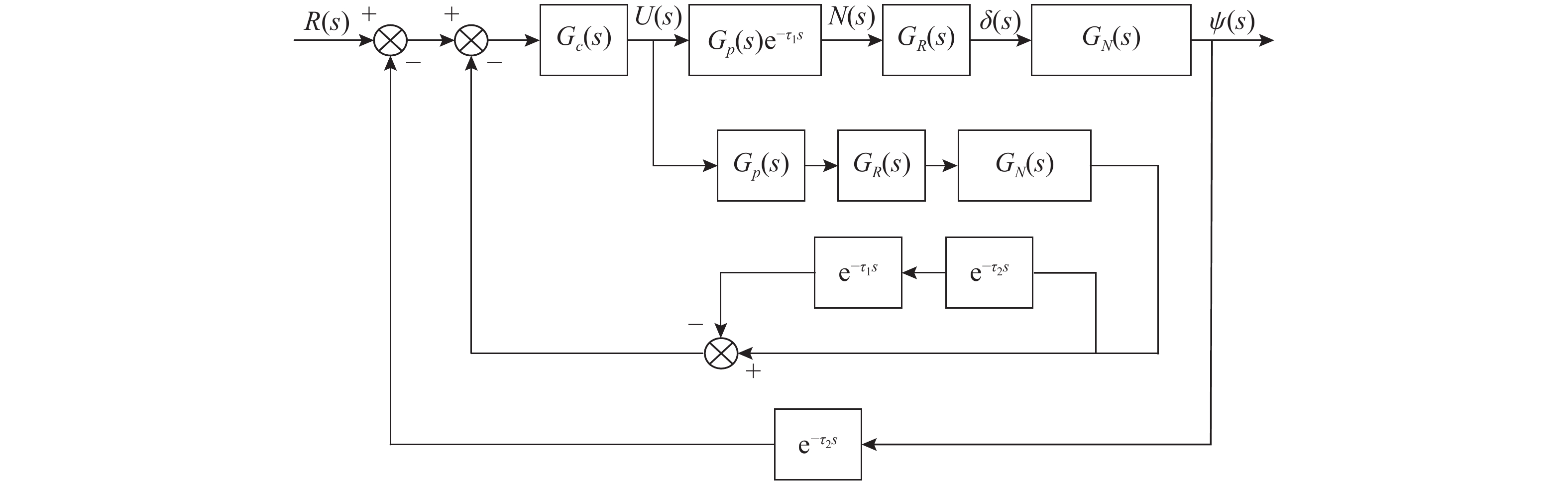
图 6 引入改进Smith预估器的闭环航向控制等效系统
Figure 6. Equivalent closed-loop heading control system with optimized Smith predictor
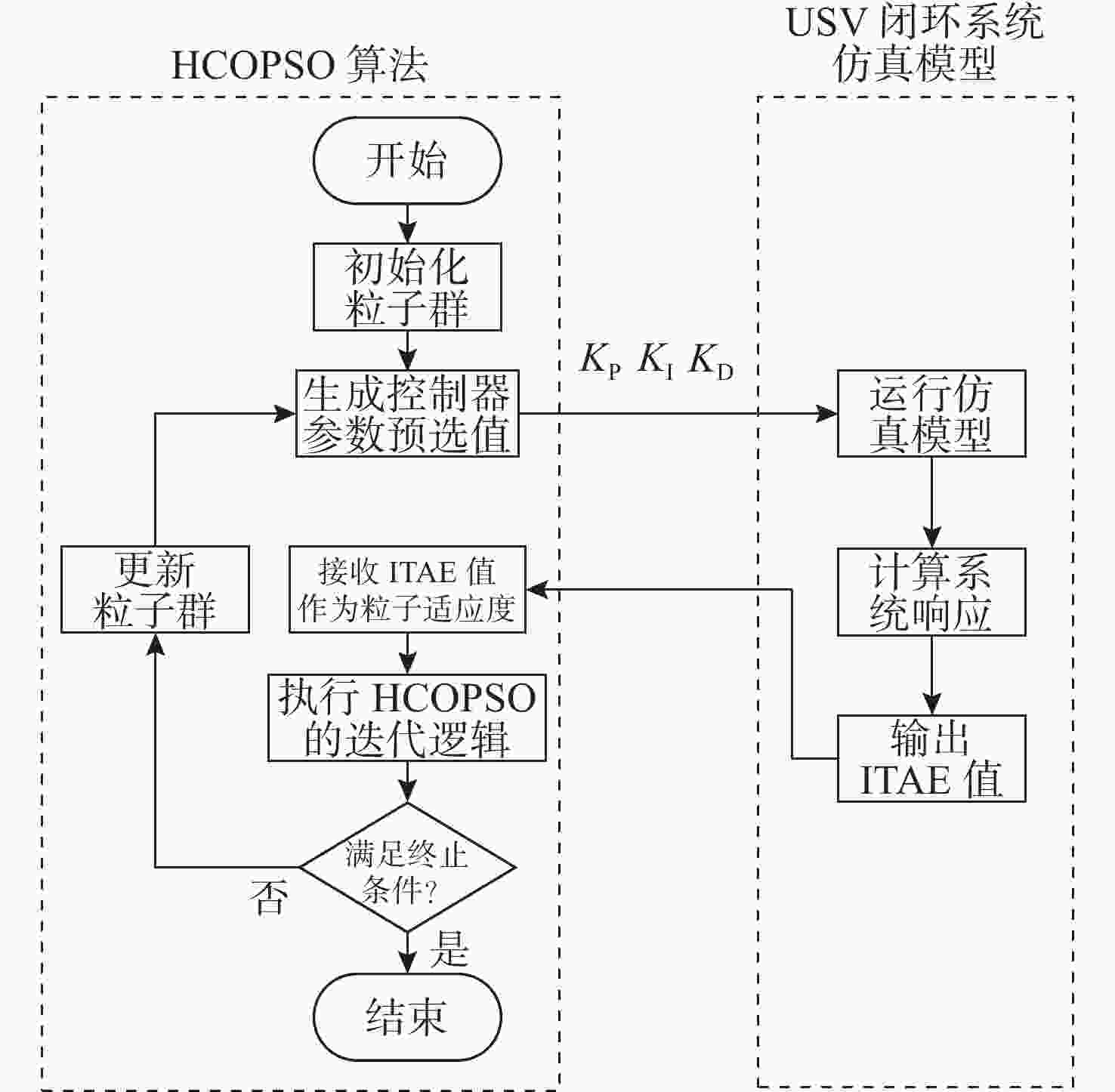
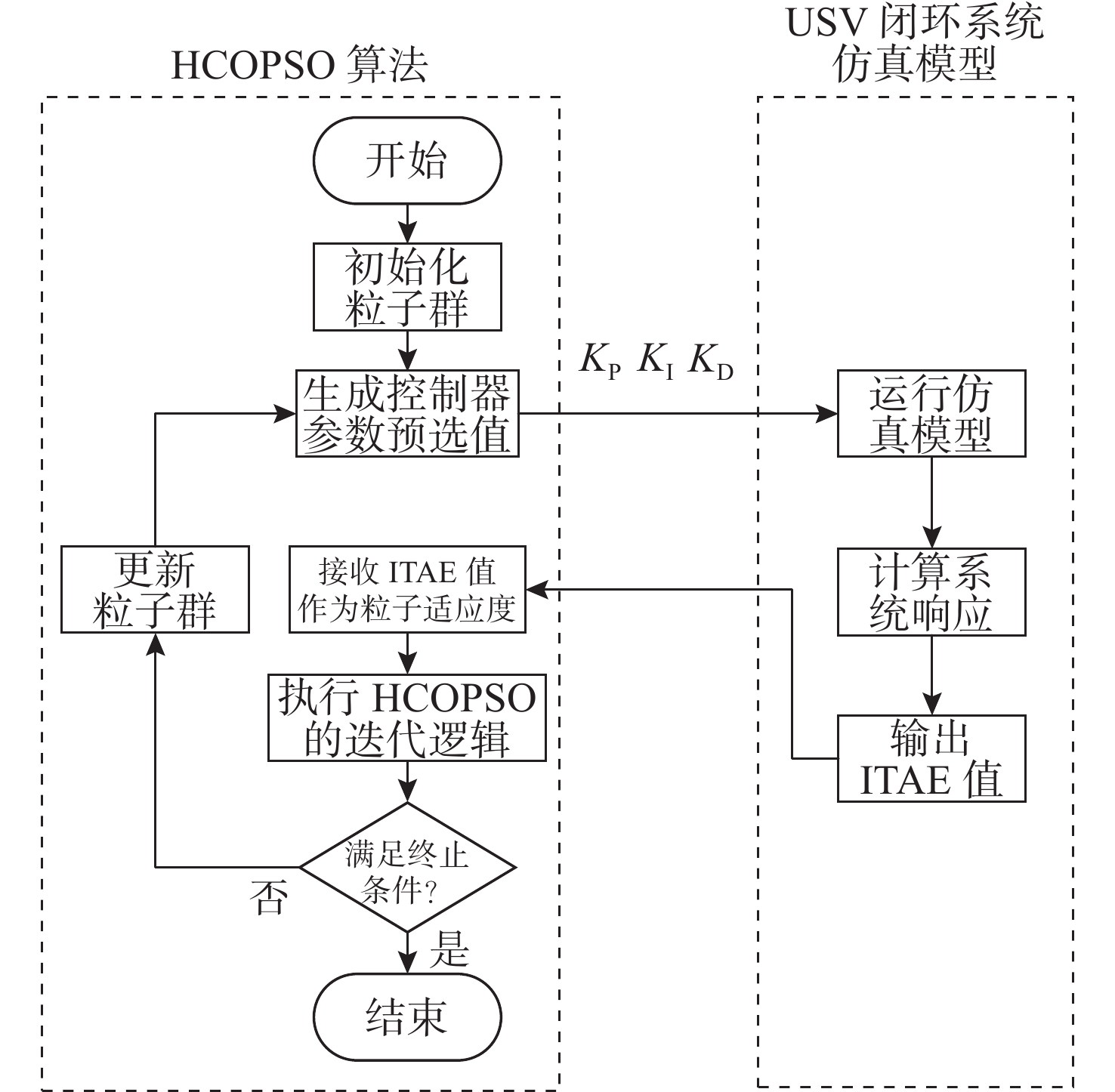
图 8 HCOPSO算法优化控制器参数流程图
Figure 8. Flow chart of optimizing parameters of controller using HCOPSO algorithm
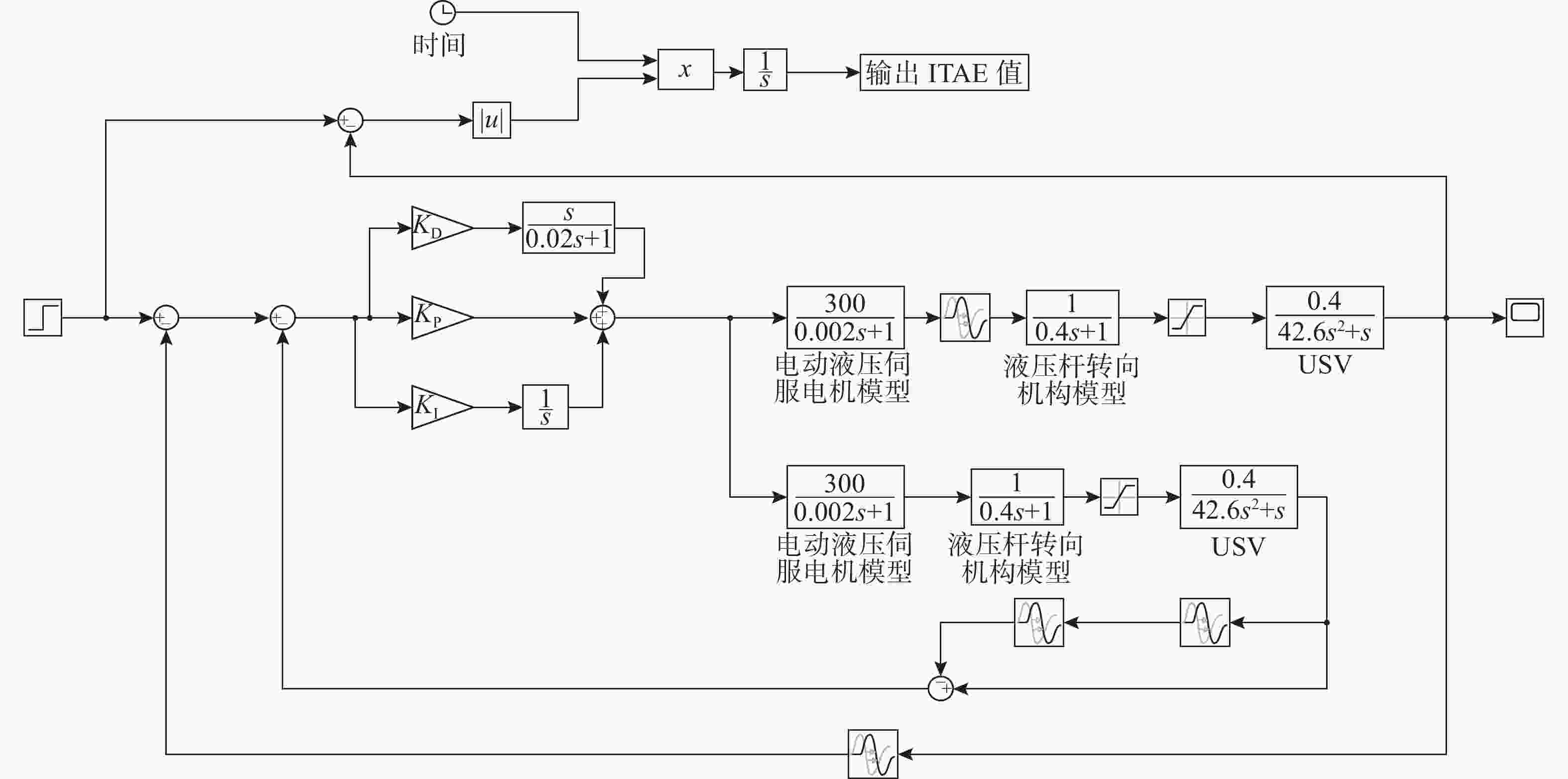
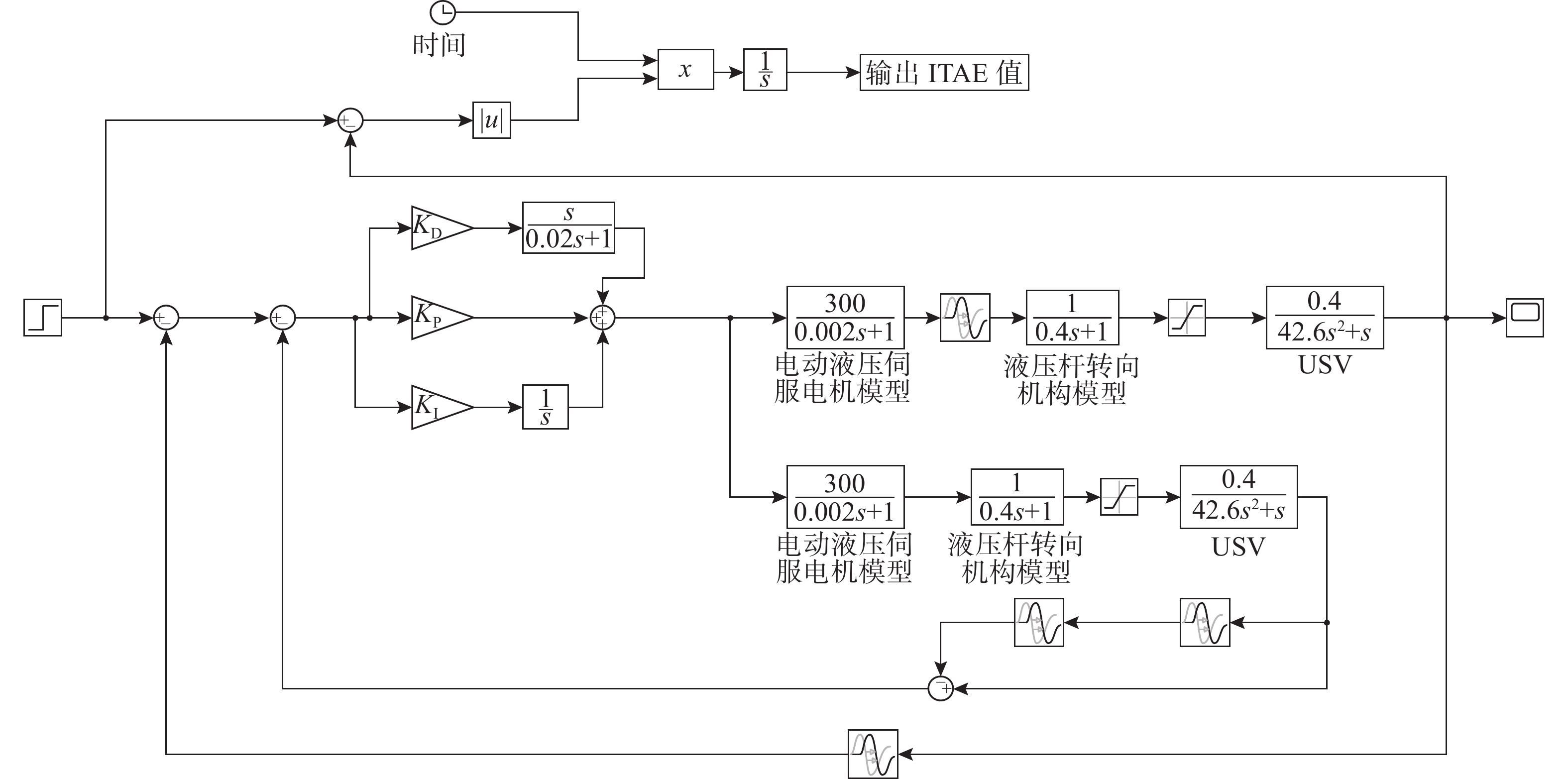
图 9 改进Smith预估PID控制器的USV闭环系统仿真模型
Figure 9. Simulation model of closed-loop system with optimized Smith predictor based PID controller of USV
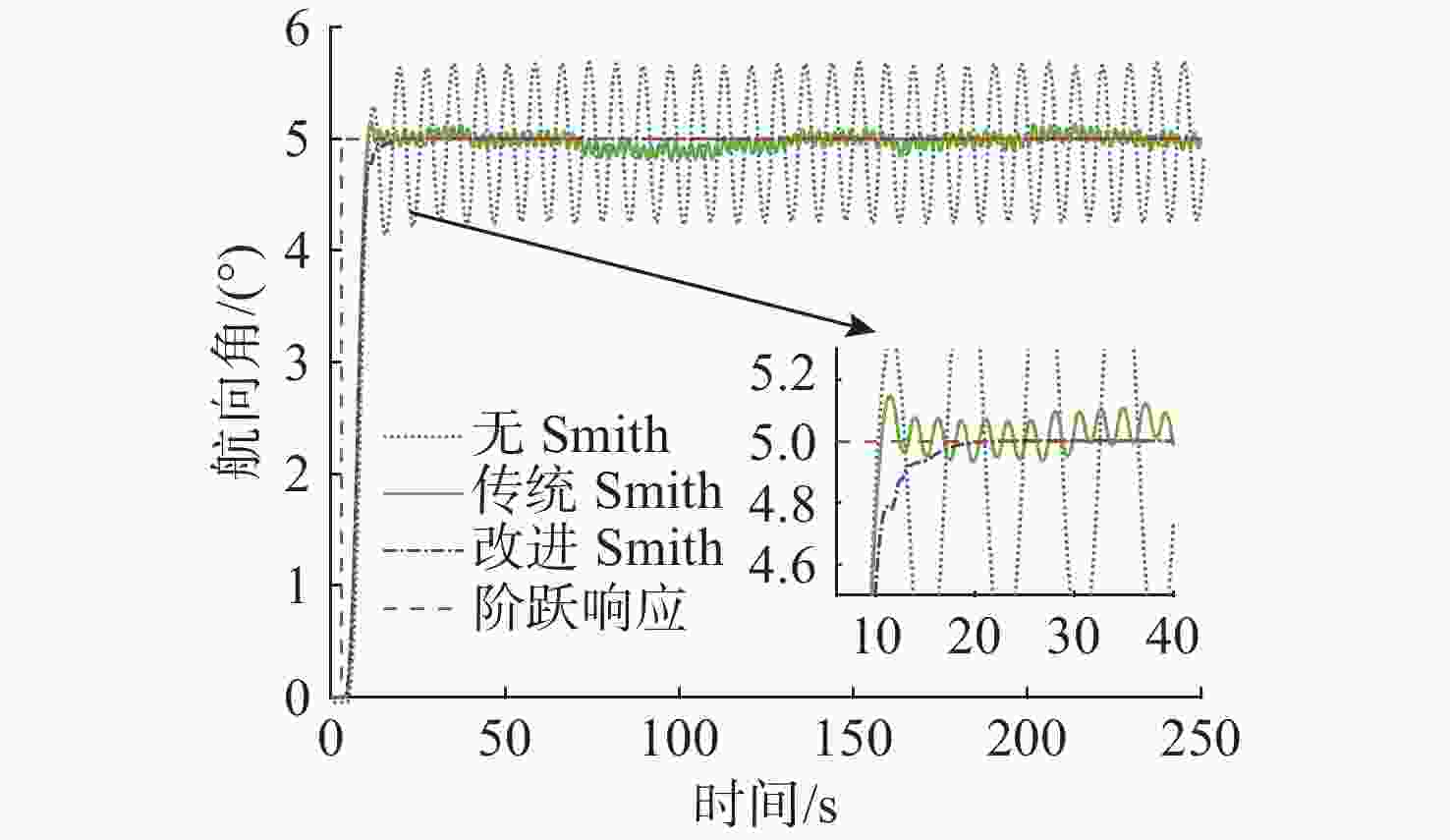
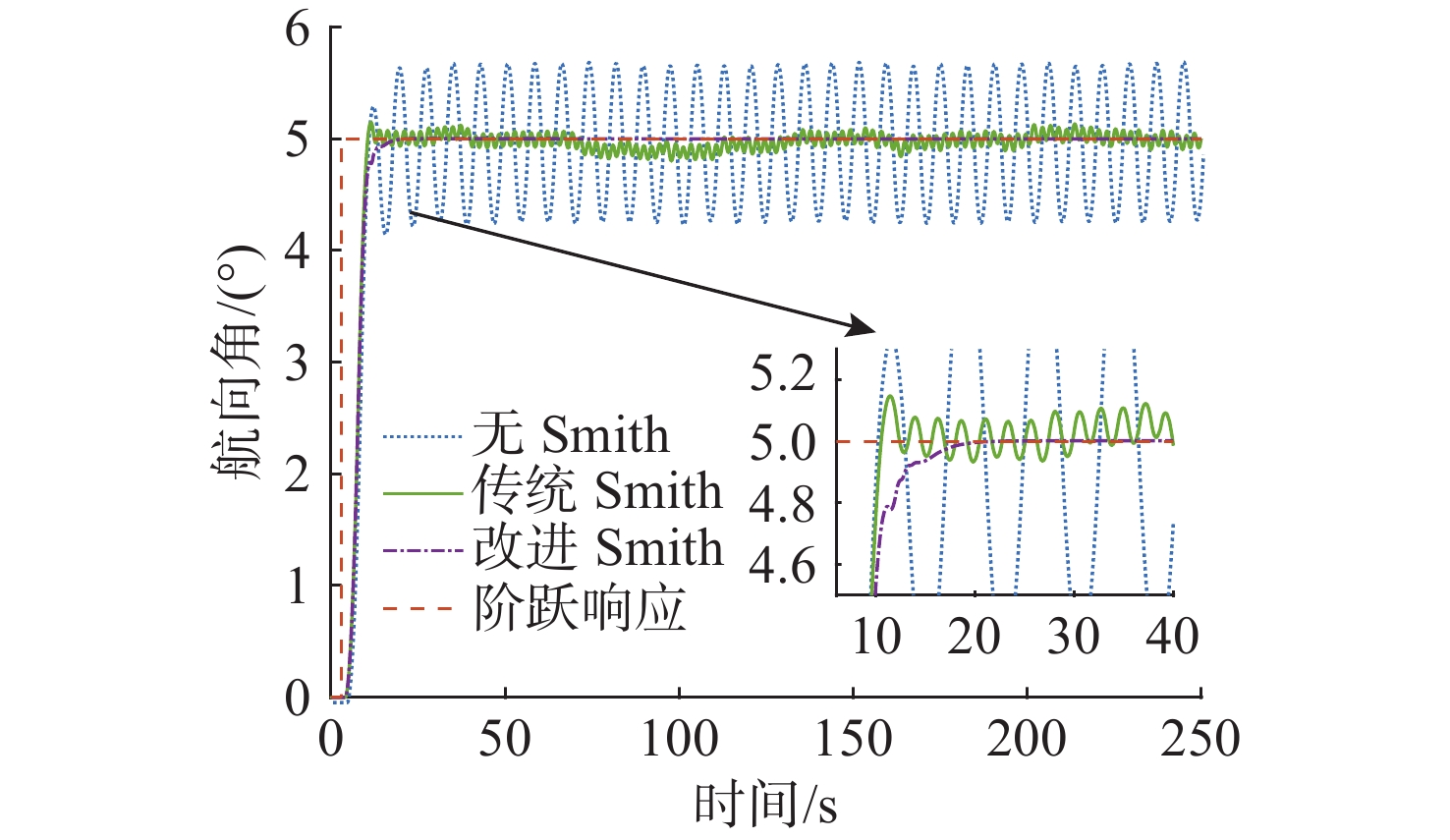
图 10 单阶跃输入下改进Smith控制对航向角控制效果对比
Figure 10. Control effect comparison of optimized Smith control on heading angle under single step input
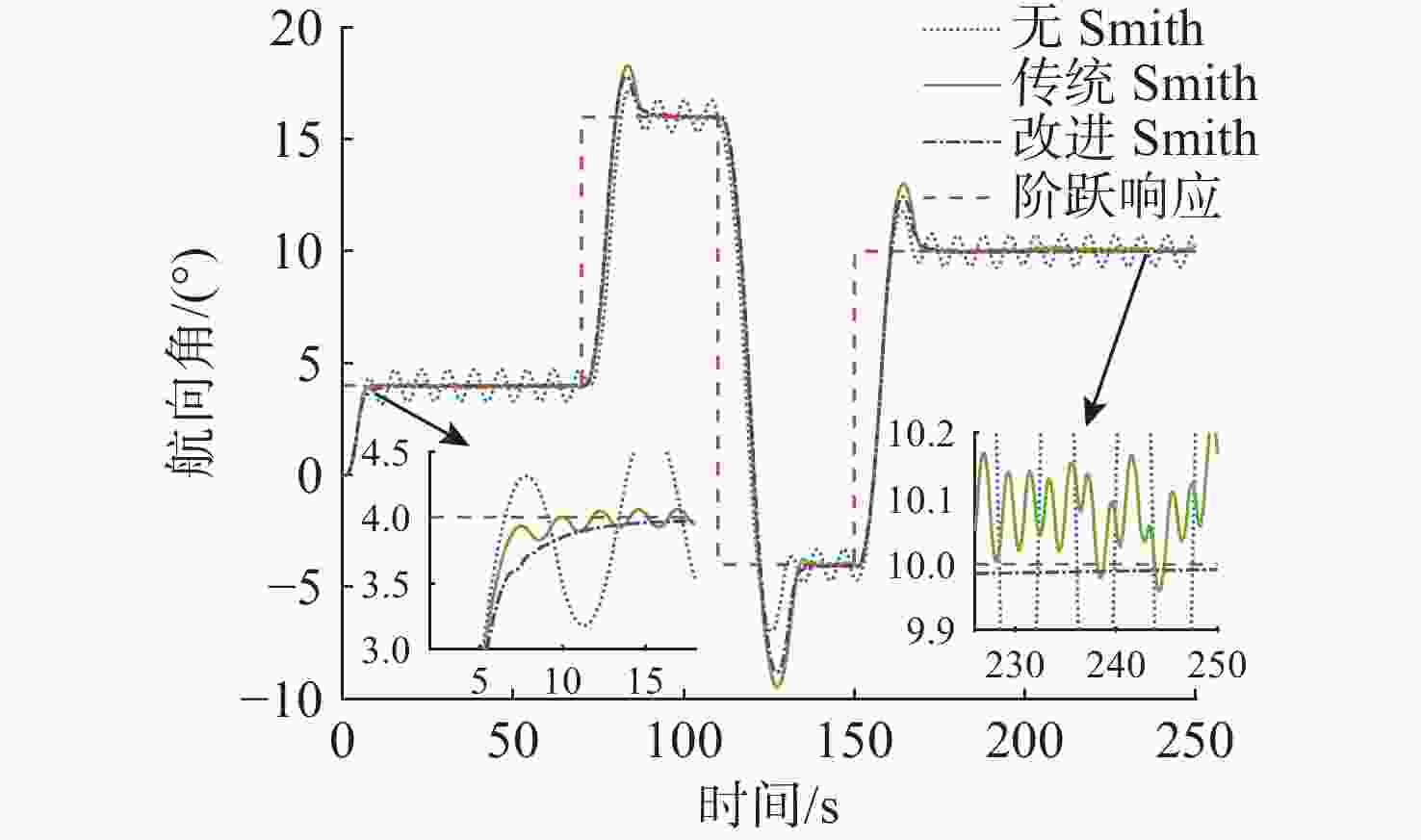
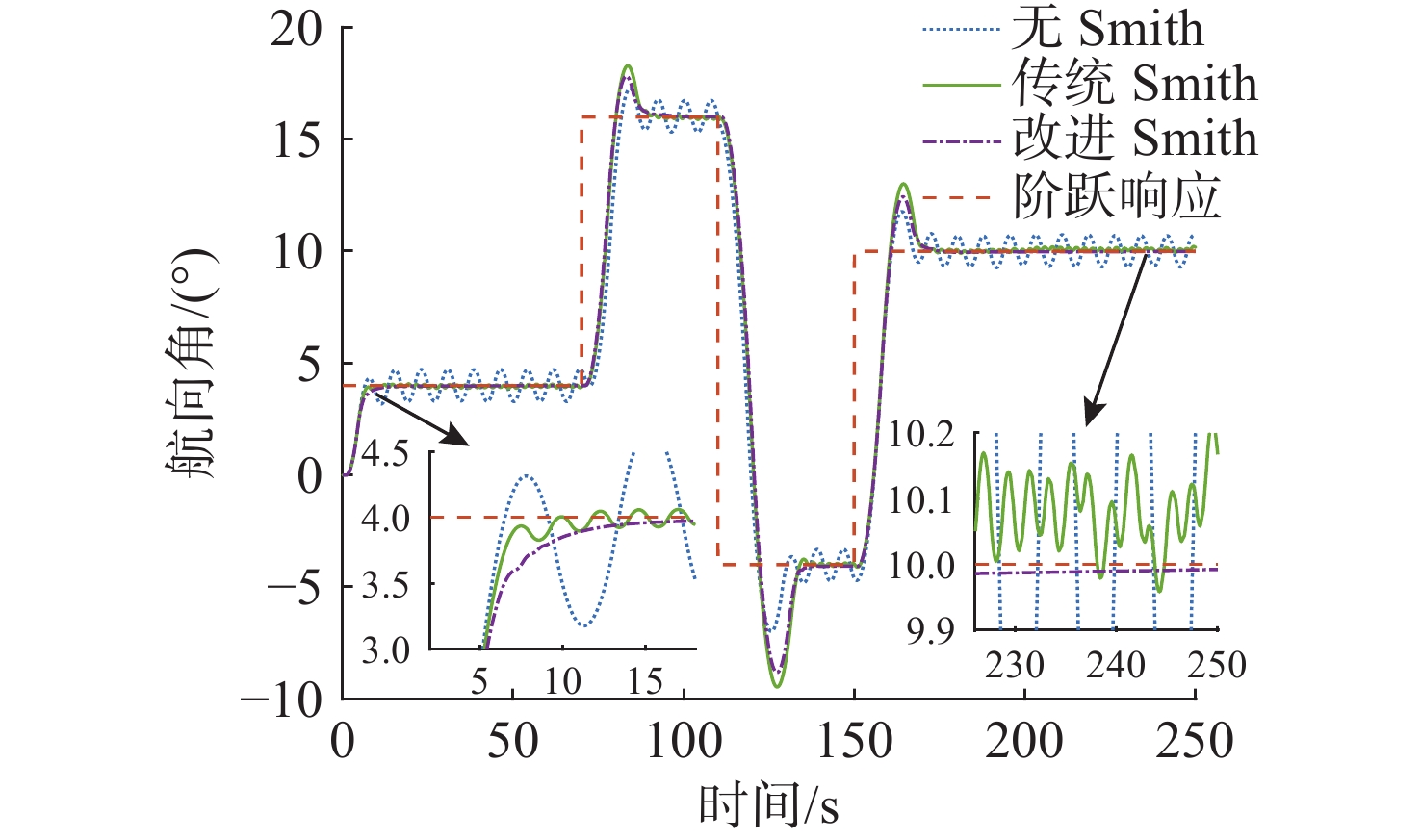
图 11 不同阶跃输入下改进Smith控制对航向角控制效果对比
Figure 11. Control effect comparison of optimized Smith control on heading angle under different step inputs
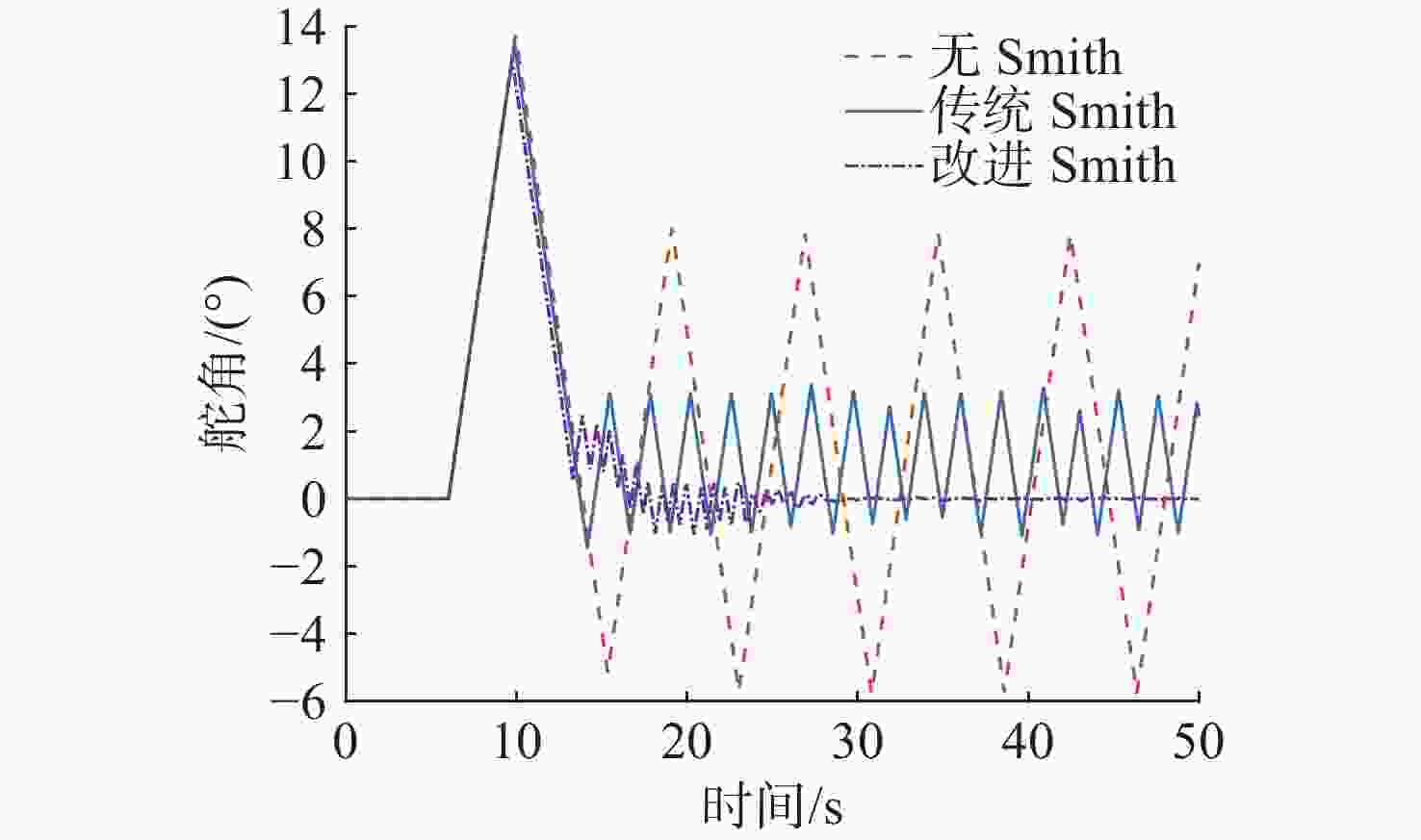
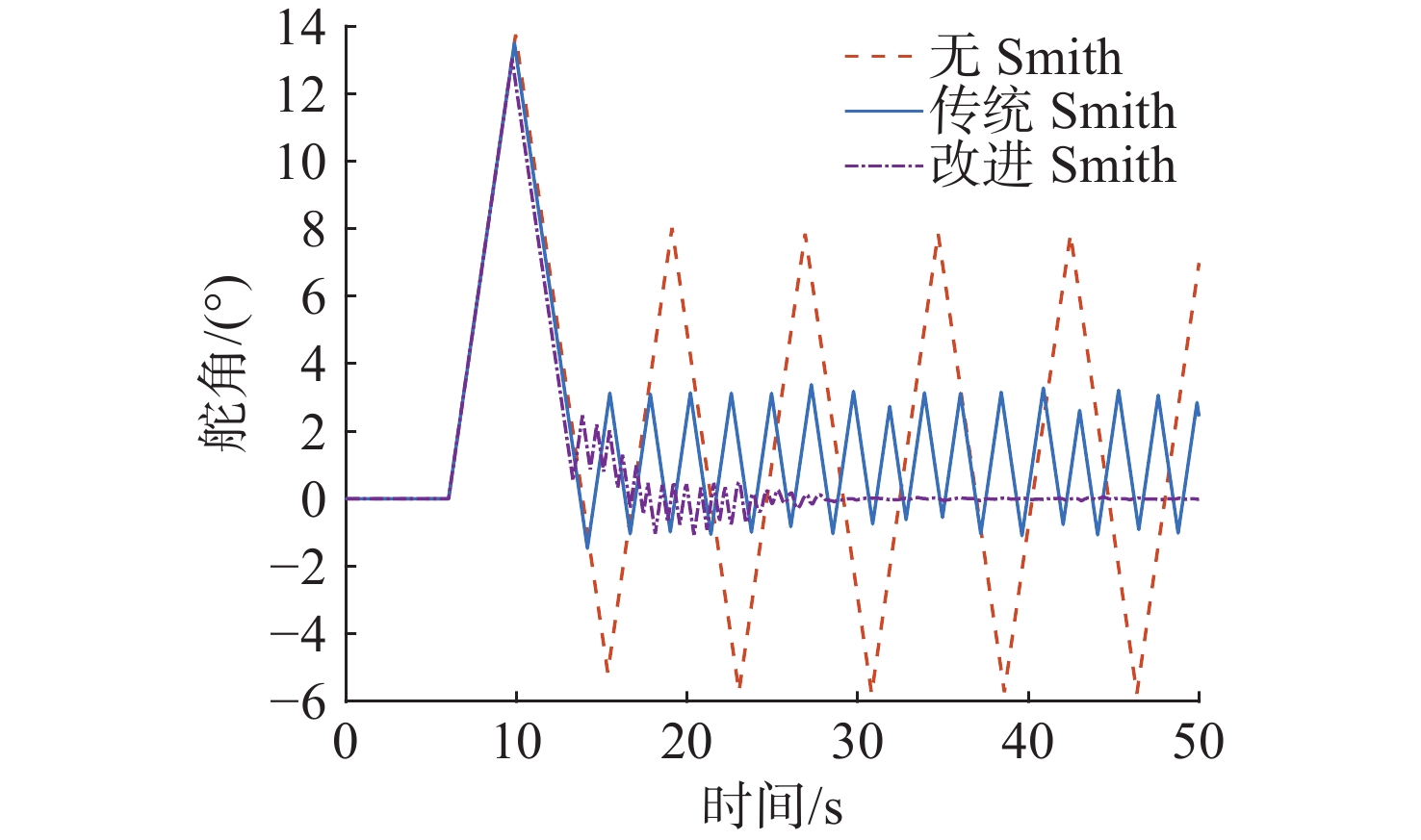
图 12 单阶跃输入下不同系统舵角输出曲线对比
Figure 12. Comparison of rudder angle output curves of different systems under single step input
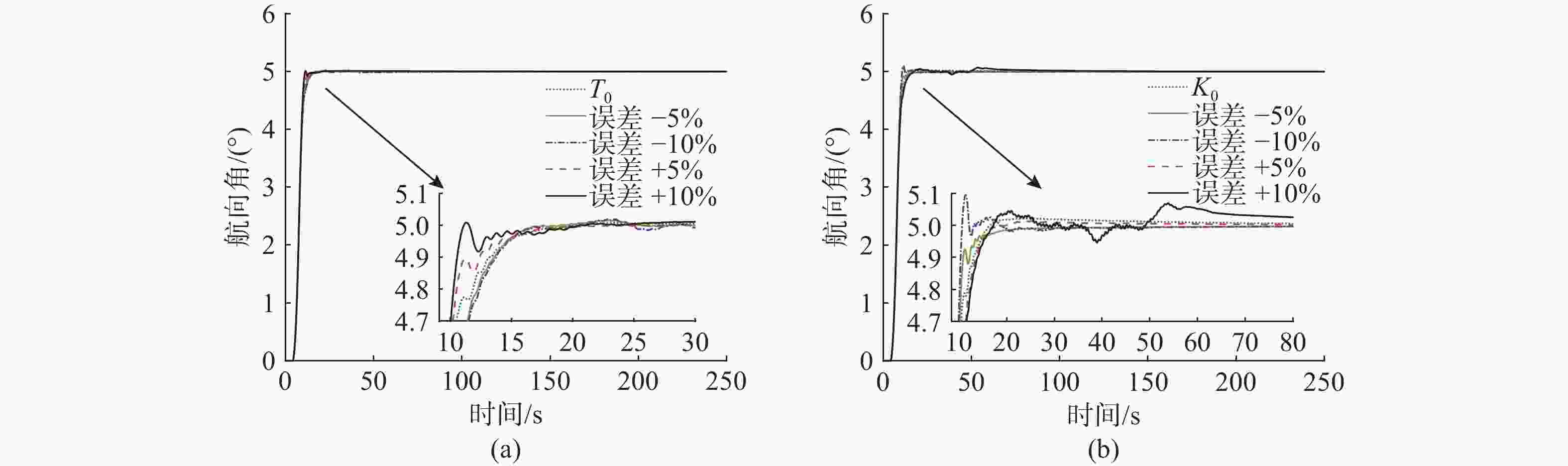
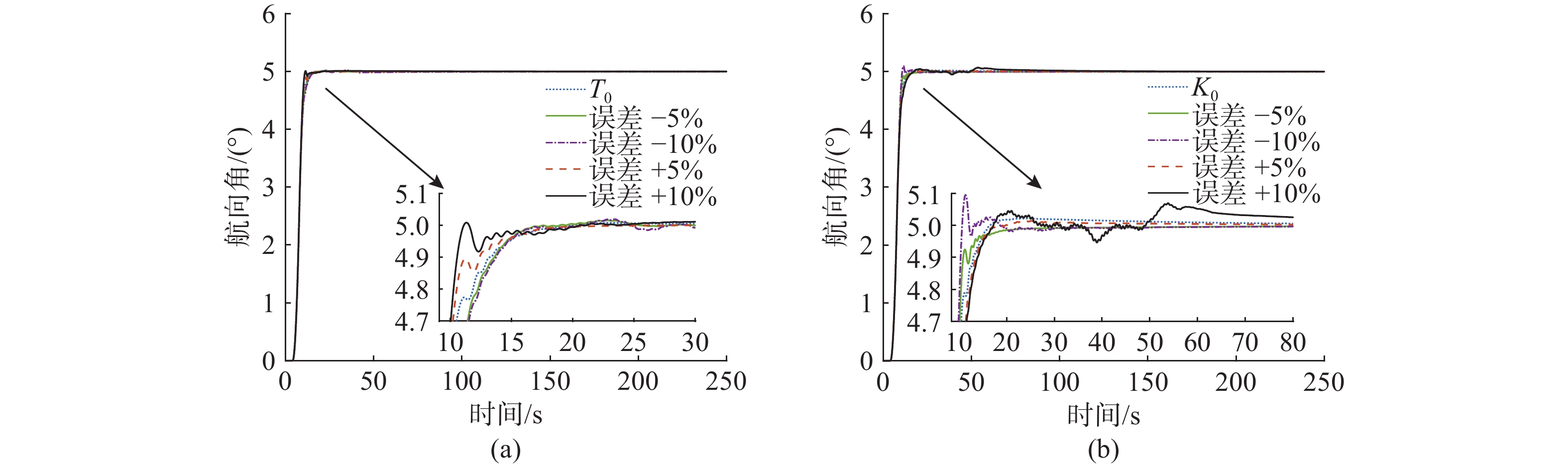
图 13 补偿模型存在偏差时系统航向角曲线
Figure 13. Heading angle curves of the system with deviation in the compensation model
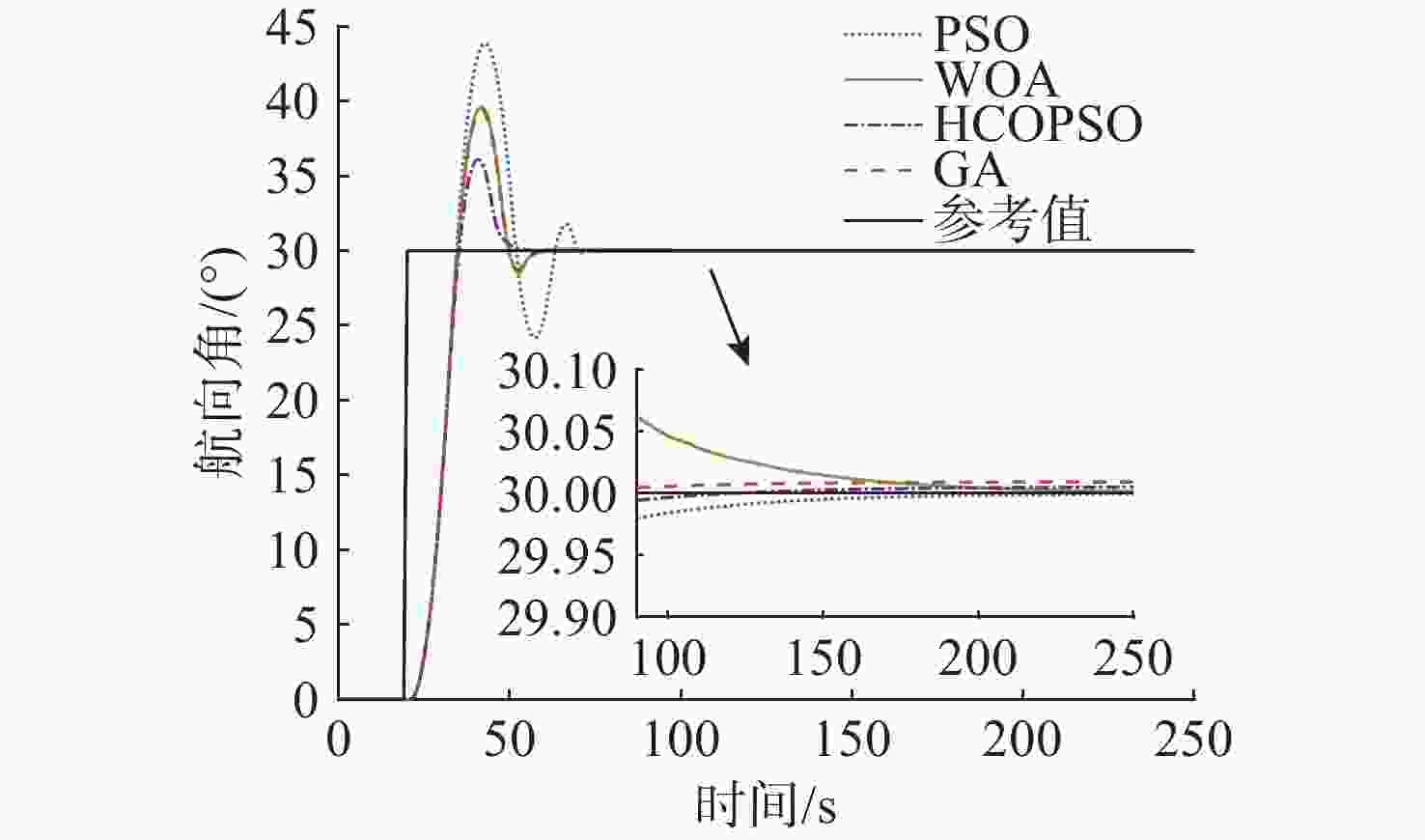
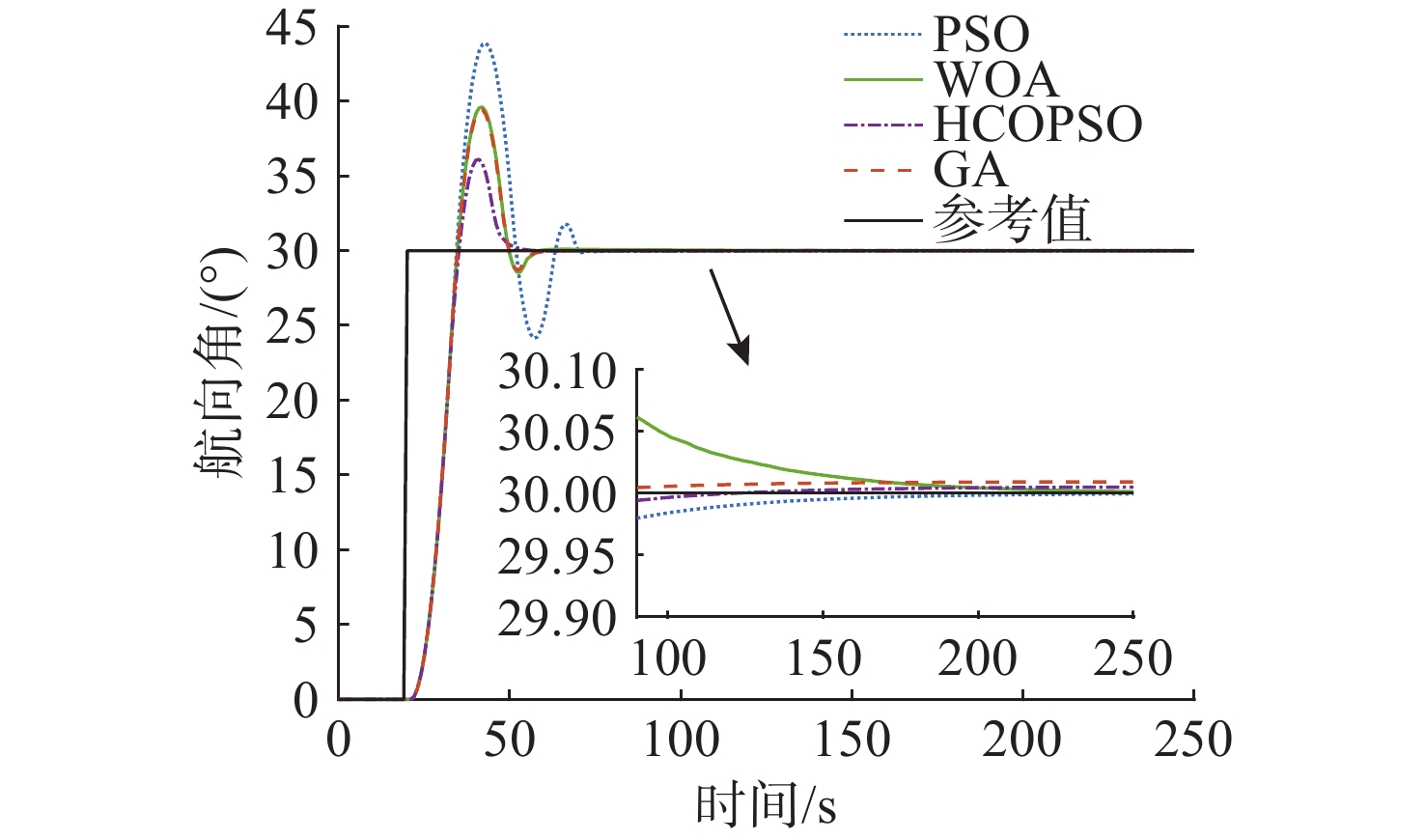
图 15 采用不同控制方法的USV航向角输出曲线对比
Figure 15. Comparison of the heading angle output curves of the USV with different control methods
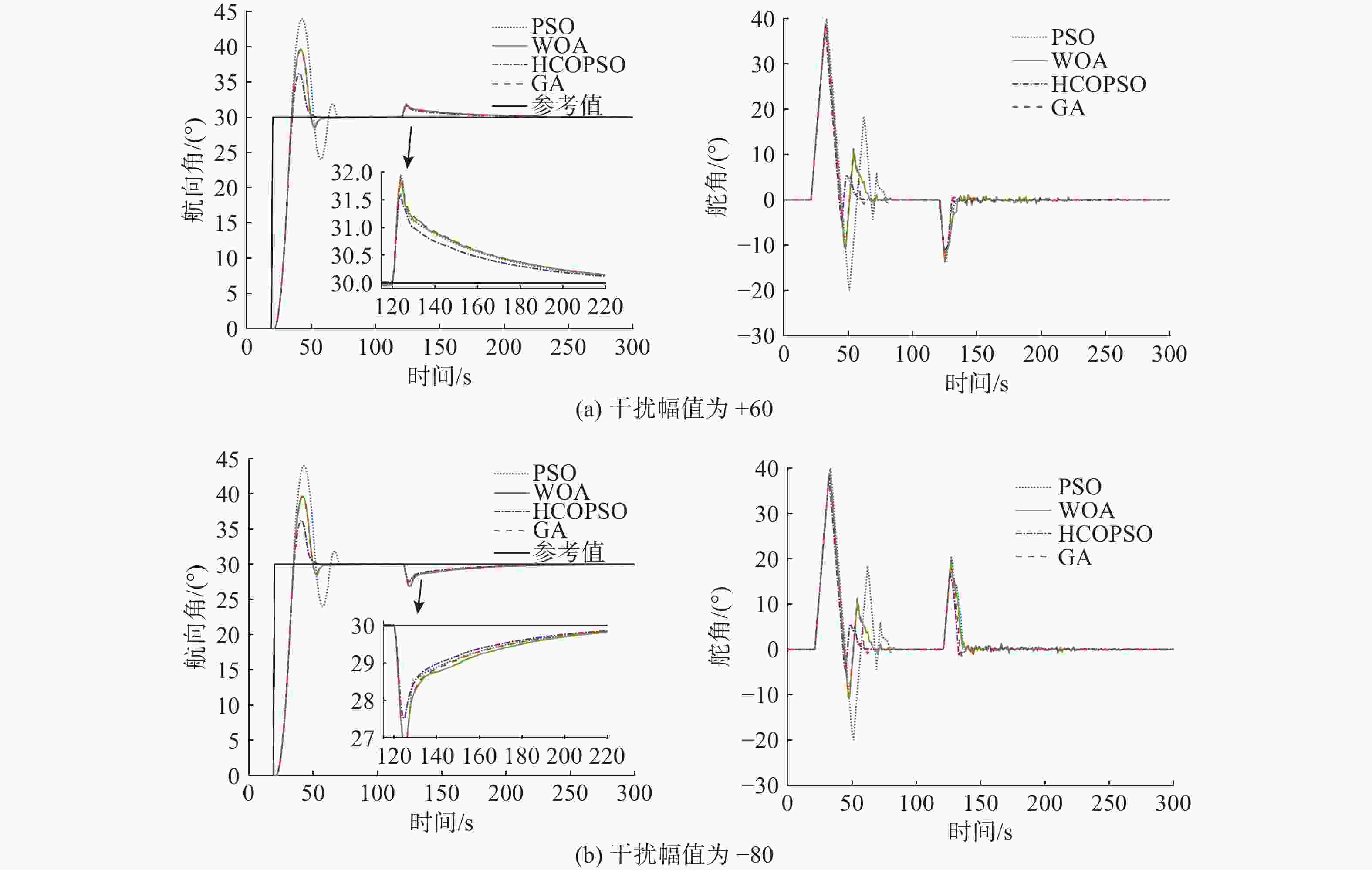
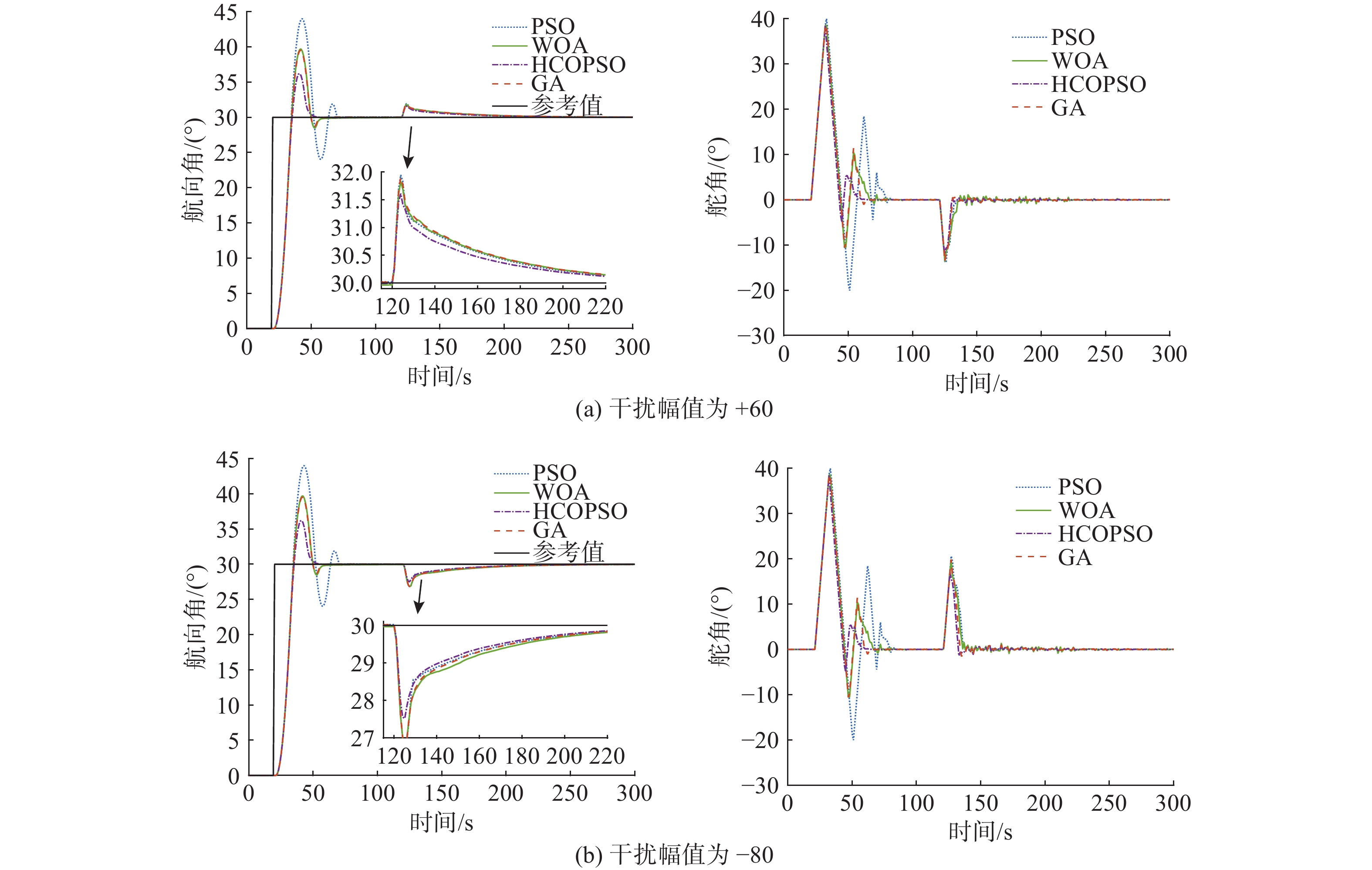
图 16 不同干扰下采用不同算法的USV航向角与舵角输出曲线对比
Figure 16. Comparison of the heading angle output and rudder angle output curves of the USV with different control methods under different disturbances
表 1 HCOPSO算法伪代码
Table 1. Pseudocode of the hybrid mean center opposition based learning particle swarm optimization algorithm
算法: 混合均值中心反向学习粒子群优化(HCOPSO)算法 输入: 种群数N, 维度D, 惯性权重w, 学习因子c1, c2, 最大迭代Max_iter, 最大评估Max_eval, 边界[xmin, xmax] 输出: 全局最优位置g及其适应度f(g) 1. 随机初始化粒子位置x_i和速度v_i, i=1 to N; p_i=x_i 2. 计算f(x_i), 若f(x_i)更优则更新个体最优p_i; 设置全局最优g 3. for iter = 1 to Max_iter do 4. for i = 1 to N do 5. for d = 1 to D do 6. v_i[d] = w * v_i[d] + c1 * r1 * (p_i[d] − x_i[d]) + c2 * r2 * (g[d] − x_i[d]) 7. x_i[d] = x_i[d] + v_i[d] 8. if f(x_i)更优于f(p_i) then p_i=x_i 9. if f(x_i)更优于f(g) then g=x_i 10. end for 11. end for 12. 计算x_MC, x_PMC, x_HMC(依次由式(11), 式(12), 式(13)可得) 13. 计算x_OBL_HMC(由式(14)可得) 14. if f(x_OBL_HMC)更优于f(g) then g=x_OBL_HMC 15. if eval ≥ Max_eval then break 16. end for 17. return g, f(g)  下载: 导出CSV
下载: 导出CSV
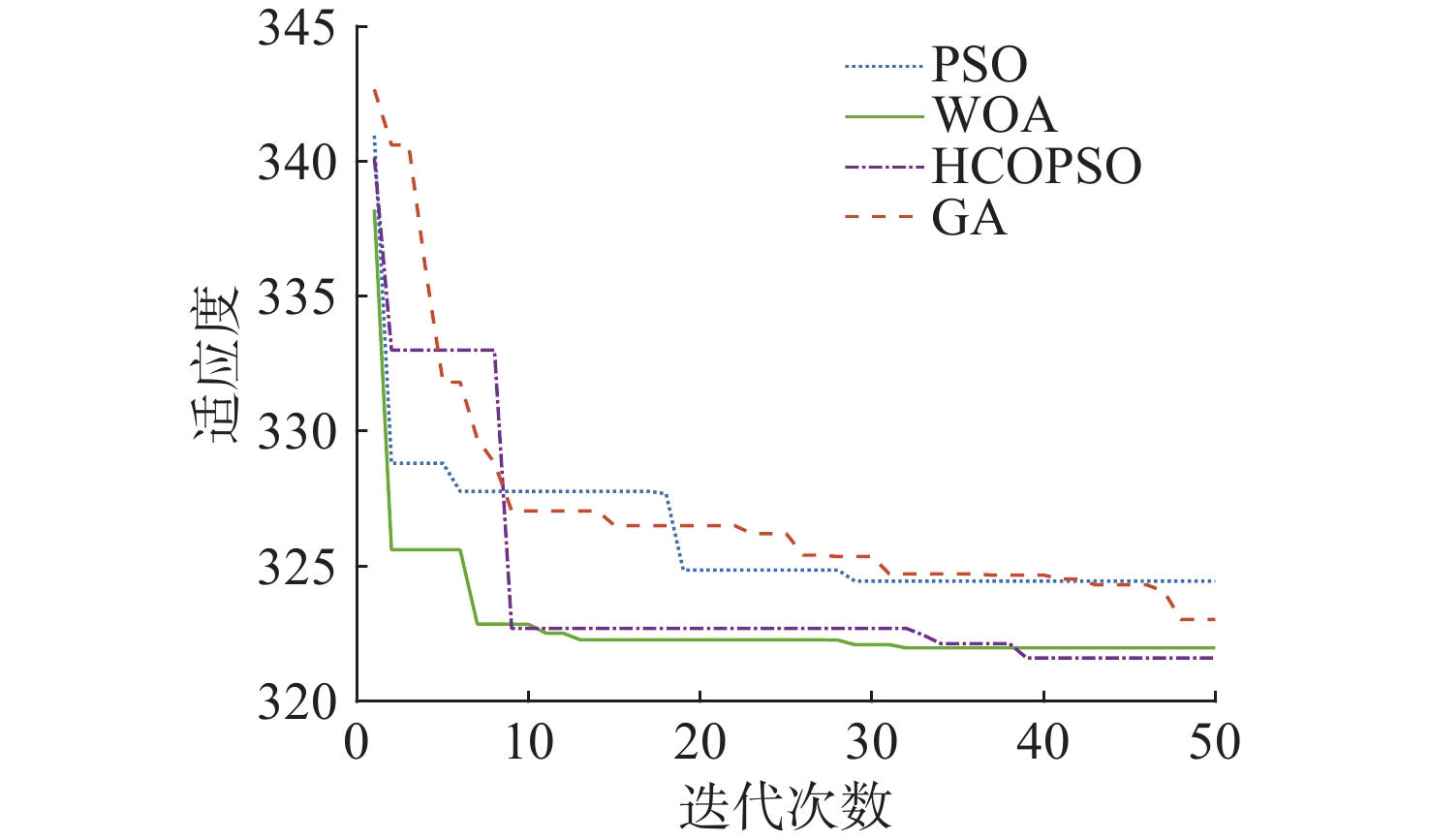
表 2 基于改进Smith预估PID控制器的控制系统框架下不同算法最佳适应度值
Table 2. Optimal fitness values of different algorithms under the control system framework of optimized Smith predictor PID controller
智能优化
算法$ {K_{\text{P}}} $ $ {K_{\text{I}}} $ $ {K_{\text{D}}} $ 迭代次数 最佳适应度值 PSO 3.34 0 5.00 29 324.4 WOA 6.61 0 15.11 32 322.0 HCOPSO 4.13 0 10.21 39 321.6 GA 3.77 0.000 2 8.75 48 323.0
下载: 导出CSV
表 3 不同算法整定的PID参数值和动态响应指标
Table 3. The PID parameter values and dynamic response indices tuned by different algorithms
智能优化
算法超调量/% 调节时间/s ITAE 峰值时间/s PSO 46.3 71.4 8 341 43.0 WOA 32.0 57.9 4 801 42.0 HCOPSO 20.4 52.0 3 722 41.0 GA 31.4 58.1 4 938 42.0
下载: 导出CSV
-
[1] TOUZOUT W, BENMOUSSA Y, BENAZZOUZ D, et al. Unmanned surface vehicle energy consumption modelling under various realistic disturbances integrated into simulation environment[J]. Ocean Engineering, 2021, 222: 108560. doi: 10.1016/j.oceaneng.2020.108560 [2] 祝川, 卢俊, 吴翔. 无人艇直驱式电液伺服舵机系统建模与仿真[J]. 舰船科学技术, 2019, 41(23): 87-92.ZHU C, LU J, WU X. Modeling and simulation of direct-drive electro-hydraulic servo steering-gear system of USV[J]. Ship Science and Technology, 2019, 41(23): 87-92. [3] GE Y, ZHONG L, QIANG Z J. Research on USV heading control method based on Kalman filter sliding mode control[C]//Proceedings of the 32nd 2020 Chinese Control and Decision Conference. Hefei, China: IEEE, 2020: 1547-1551. [4] 周嘉俊, 吴萌岭, 刘宇康, 等. 基于改进史密斯预估器的列车制动减速度控制研究[J]. 同济大学学报(自然科学版), 2020, 48(11): 1657-1667.ZHOU J J, WU M L, LIU Y K, et al. Train braking deceleration control based on improved Smith estimator[J]. Journal of Tongji University(Natural Science), 2020, 48(11): 1657-1667. [5] Al-DHAIFALLAH M. Fractional order and Smith predictor structure—performance analysis for pressure control process[C]//Proceedings of the 2023 20th International Multi-Conference on Systems, Signals & Devices(SSD). Mahdia, Tunisia: IEEE, 2023: 700-704. [6] DING Q H, FANG B. Research on the application of improved Smith predictor on control systems which contain time-delay in feedback path[C]//Proceedings of the 32nd Chinese Control Conference. Xi’an, China: IEEE, 2017: 309-312. [7] MEHALLEL A, FELIU-BATLLE V. Reducing the impacts of withdrawals on the water distribution in main irrigation canals based on a modified Smith predictor control scheme[J]. Water, 2025, 17(3): 373. [8] 王健, 祖广浩. 磁流变半主动悬架的史密斯预估-LQG时滞补偿控制方法[J]. 重庆理工大学学报(自然科学), 2017, 31(8): 65-72, 80.WANG J, ZU G H. Smith predictor-LQG control for time delay compensation of magneto-rheological semi-active suspension[J]. Journal of Chongqing University of Technology(Natural Science), 2017, 31(8): 65-72, 80. [9] INYANG I J, WHIDBORNE J F. Applying a modified Smith predictor-bilinear proportional plus integral control for directional drilling[J/OL]. IFAC-PapersOnLine, 2017, 50(2): 139-144. https://doi.org/10.1016/j.ifacol.2017.12.026 [10] SINGHA P, MEENA R, CHAKRABORTY S, et al. Robust PIDF-PID cascade control scheme for delay-dominant stable and integrating chemical processes[J]. Journal of the Taiwan Institute of Chemical Engineers, 2025, 173: 106165. doi: 10.1016/j.jtice.2025.106165 [11] 苗河泉, 刁培松, 徐广飞, 等. 基于改进史密斯预估控制的电液转向时滞补偿研究[J]. 农机化研究, 2023, 45(7): 232-237. [12] MORALES L. Smith predictor based LAMDA sliding-mode control applied to a mixing tank with variable dead time[C]//2022 IEEE ANDESCON. Barranquilla, Colombia: IEEE, 2022: 1-6. [13] TANG G, LEI J M, DU H H, et al. Proportional-integral-derivative controller optimization by particle swarm optimization and back propagation neural network for a parallel stabilized platform in marine operations[J]. Journal of Ocean Engineering and Science, 2025, 10(1): 1-10. [14] FU J, GU S, WU L, et al. Research on optimization of diesel engine speed control based on UKF-Filtered data and PSO fuzzy PID control[J]. Processes, 2025, 13(3): 777. doi: 10.3390/pr13030777 [15] ALI Z M, AHMED A M, HASANIEN H M, et al. Optimal design of fractional-order PID controllers for a nonlinear AWS wave energy converter using hybrid jellyfish search and particle swarm optimization[J]. Fractal and Fractional, 2024, 8(1): 6. [16] GHADIMI N. A new hybrid algorithm based on optimal fuzzy controller in multimachine power system[J]. Complexity, 2013, 21(1): 78-93. [17] LI B, CHE X Q, LIU C Y, et al. Parameter optimization of unmanned surface vessel propulsion motor based on BAS-PSO[J]. International Journal of Advanced Robotic Systems, 2022, 19(2): 172988142110406. [18] ZHANG H X, ZHAO Z, WEI Y C, et al. A self-tuning variable universe fuzzy PID control framework with hybrid BAS-PSO-SA optimization for unmanned surface vehicles[J]. Journal of Marine Science and Engineering, 2025, 13(3): 558. [19] 陈明志, 刘兰军, 陈家林, 等. 基于HCOPSO算法的USV舵向PID控制参数整定方法[J]. 水下无人系统学报, 2023, 31(3): 381-387.CHEN M Z, LIU L J, CHEN J L, et al. Parameter tuning method for USV rudder steering PID control based on HCOPSO algorithm[J]. Journal of Unmanned Undersea Systems, 2023, 31(3): 381-387. [20] ZHAO S Q, MU J R, LIU H D, et al. Heading control of USV based on fractional-order model predictive control[J]. Ocean Engineering, 2025, 322: 120476. doi: 10.1016/j.oceaneng.2025.120476 [21] MCCUE L. Handbook of marine craft hydrodynamics and motion control[J]. IEEE Control Systems, 2016, 36(1): 78-79. doi: 10.1109/MCS.2015.2495095 [22] 韩巍, 高丙坤, 郭浩轩. 分数阶时滞系统的Smith预估分数阶PI控制[J]. 吉林大学学报(信息科学版), 2020, 38(5): 542-547.HAN W, GAO B K, GUO H X. Smith predictor fractional order PI control for fractional order with time delay[J]. Journal of Jilin University(Information Science Edition), 2020, 38(5): 542-547. [23] 孙辉, 邓志诚, 赵嘉, 等. 混合均值中心反向学习粒子群优化算法[J]. 电子学报, 2019, 47(9): 1809-1818.SUN H, DENG Z C, ZHAO J, et al. Hybrid mean center opposition-based learning particle swarm optimization[J]. Acta Electronica Sinica, 2019, 47(9): 1809-1818. [24] 朱蓉, 靳雁霞, 范卫华. 融合优质粒子分布的粒子群优化算法[J]. 小型微型计算机系统, 2015, 36(3): 576-580. [25] TIZHOOSH H R. Opposition-based learning: A new scheme for machine intelligence[C]//International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce. Vienna, Austria: IEEE, 2005: 695-701. [26] MA X L, LIU F, QI Y T, et al. MOEA/D with opposition-based learning for multiobjective optimization problem[J]. Neurocomputing, 2014, 146: 48-64. [27] 姜继海, 苏文海, 张洪波, 等. 直驱式容积控制电液伺服系统及其在船舶舵机上的应用[J]. 中国造船, 2004, 45(4): 58-63.JIANG J H, SU W H, ZHANG H B, et al. Direct drive volume control of electro-hydraulic servo system and its application to the steering system of ship[J]. Shipbuilding of China, 2004, 45(4): 58-63. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 466
- HTML全文浏览量: 211
- PDF下载量: 134
- 被引次数: 0