CFD Simulation Study on Propulsion Performance of Air-Water Dual-Mode Cross-Medium Robot
-
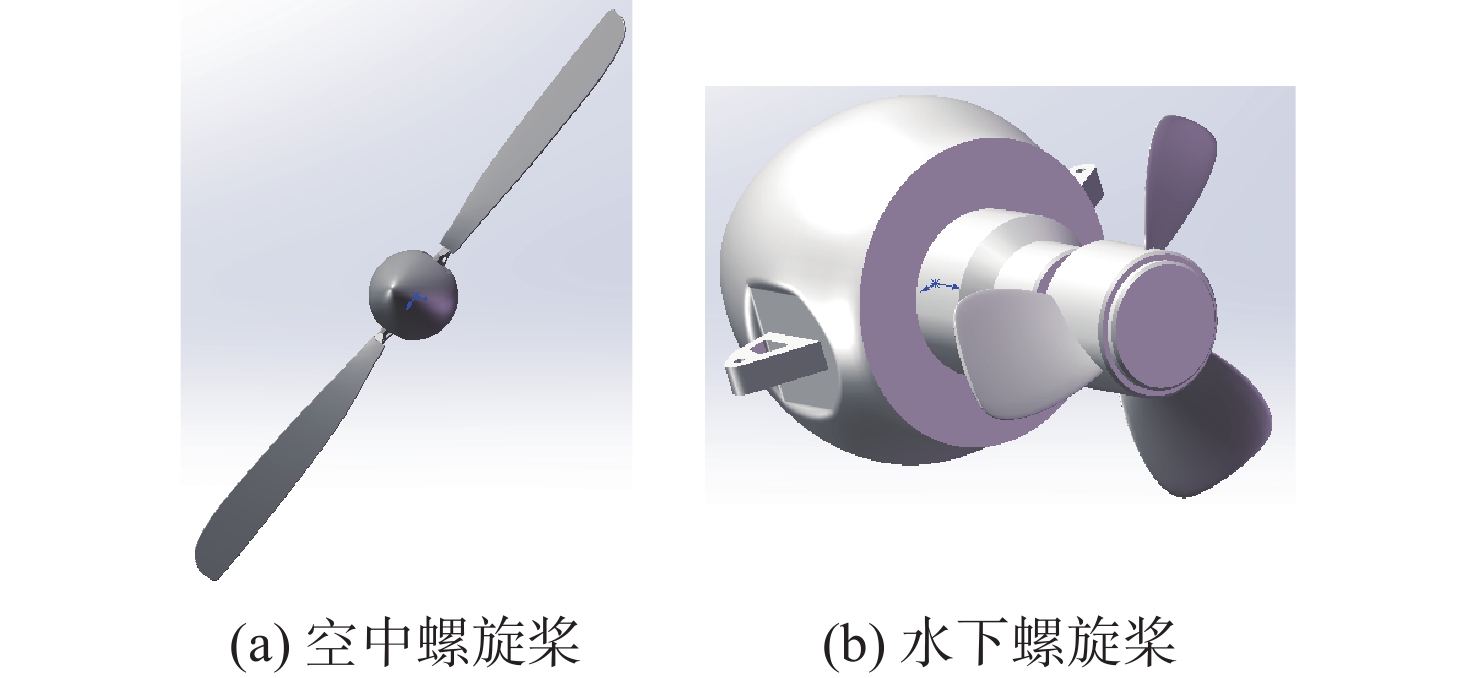
摘要: 为应对复杂海洋环境中跨介质作业的需求, 针对一款具备空中与水下双模态运动能力的跨介质机器人, 开展了推进系统的计算流体力学(CFD)仿真研究。由于空气与水的密度、黏性等物理性质存在显著差异, 传统单环境推进器难以兼顾2种介质的高效推进。为此, 文中建立了涵盖空中与水下2种典型工况的三维瞬态CFD模型, 采用滑移网格与流体体积方法, 对单螺旋桨与多推进器耦合系统进行对比仿真分析, 揭示了跨介质推进系统在推力系数、推进效率与尾流干扰等方面的差异性及规律。结果表明, 在3 kn航速下, 水下推进系统效率最高可达48.48%, 显著高于空中推进系统(7.43%); 多推进器协同运行会引起尾流耦合干扰, 但在合理布局下可提升整体效率。文中构建了统一的空-水推进CFD分析框架, 提出了一种跨介质推进性能定量评估方法, 为跨介质机器人推进系统的布局优化与多模态协同设计提供理论参考。Abstract: To meet the demand for cross-medium operations in complex marine environments, this paper conducted a computational fluid dynamics(CFD) simulation study on the propulsion system of a cross-medium robot with air-water dual-mode motion capability. Due to the significant differences in physical properties such as density and viscosity between air and water, traditional single-environment propellers fail to balance high propulsion efficiency in both media. To address this, this paper established a three-dimensional transient CFD model covering typical aerial and underwater conditions. The sliding mesh and volume of fluid methods were adopted to perform a comparative simulation analysis of single-propeller and multi-propeller coupled systems, revealing the differences and patterns of the cross-medium propulsion system in terms of thrust coefficient, propulsion efficiency, and wake interference. The results indicate that at a speed of 3 kn, the underwater propulsion system achieves an efficiency of up to 48.48%, significantly higher than that of the aerial propulsion system(7.43%). Although multi-propeller operation induces wake coupling interference, an optimized layout can improve the overall efficiency. This paper constructed a unified CFD analysis framework for air-water propulsion and proposed a quantitative evaluation method for cross-medium propulsion performance, providing theoretical support for the layout optimization and multimodal coordination design of cross-medium robots.
-
Key words:
- cross-medium robot /
- air-water dual-mode /
- CFD simulation /
- performance propulsion /
- wake /
- multimodal coordination
-
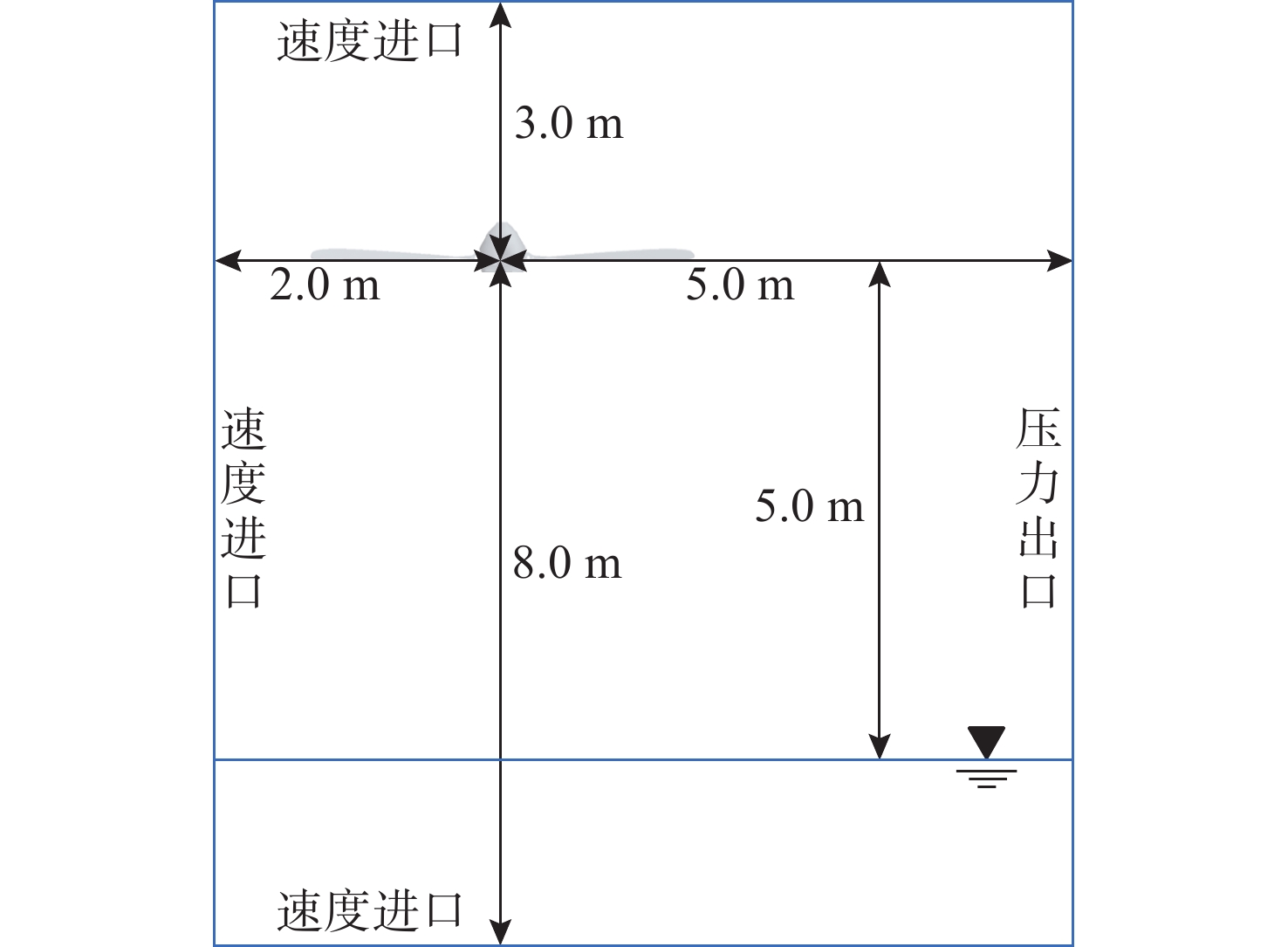
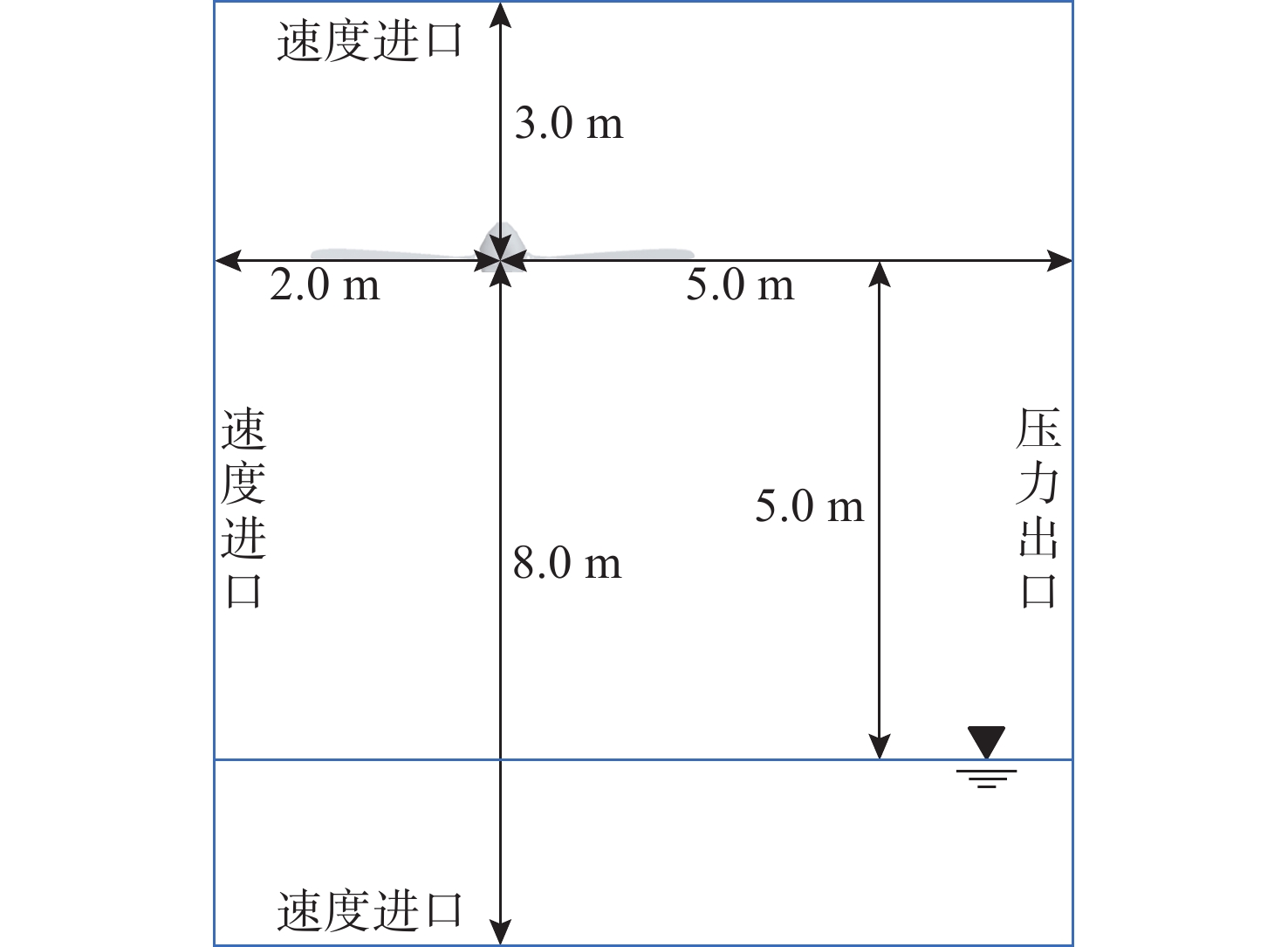
图 4 空中螺旋桨计算域尺寸及边界条件(单组)
Figure 4. Dimensions of the computational domain and boundary conditions of the aerial propeller(single)
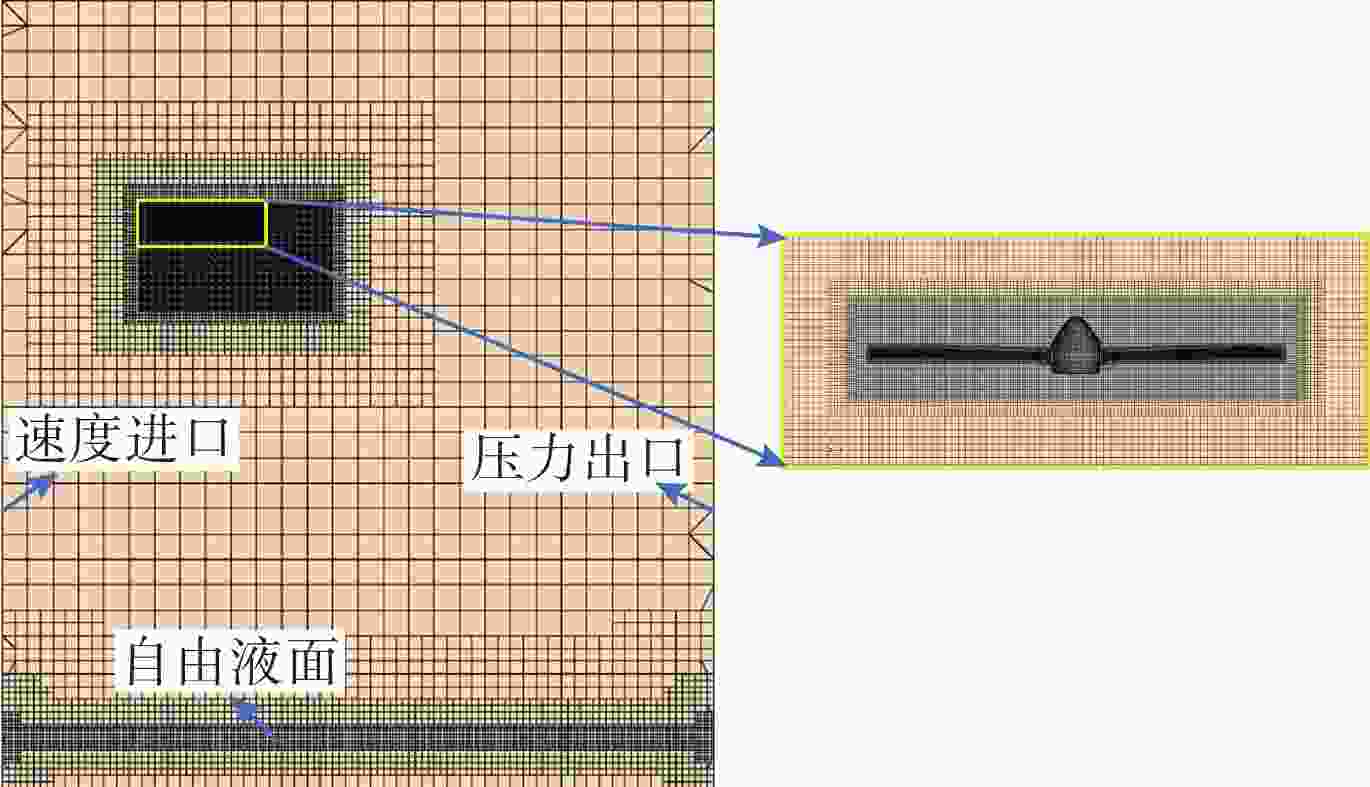
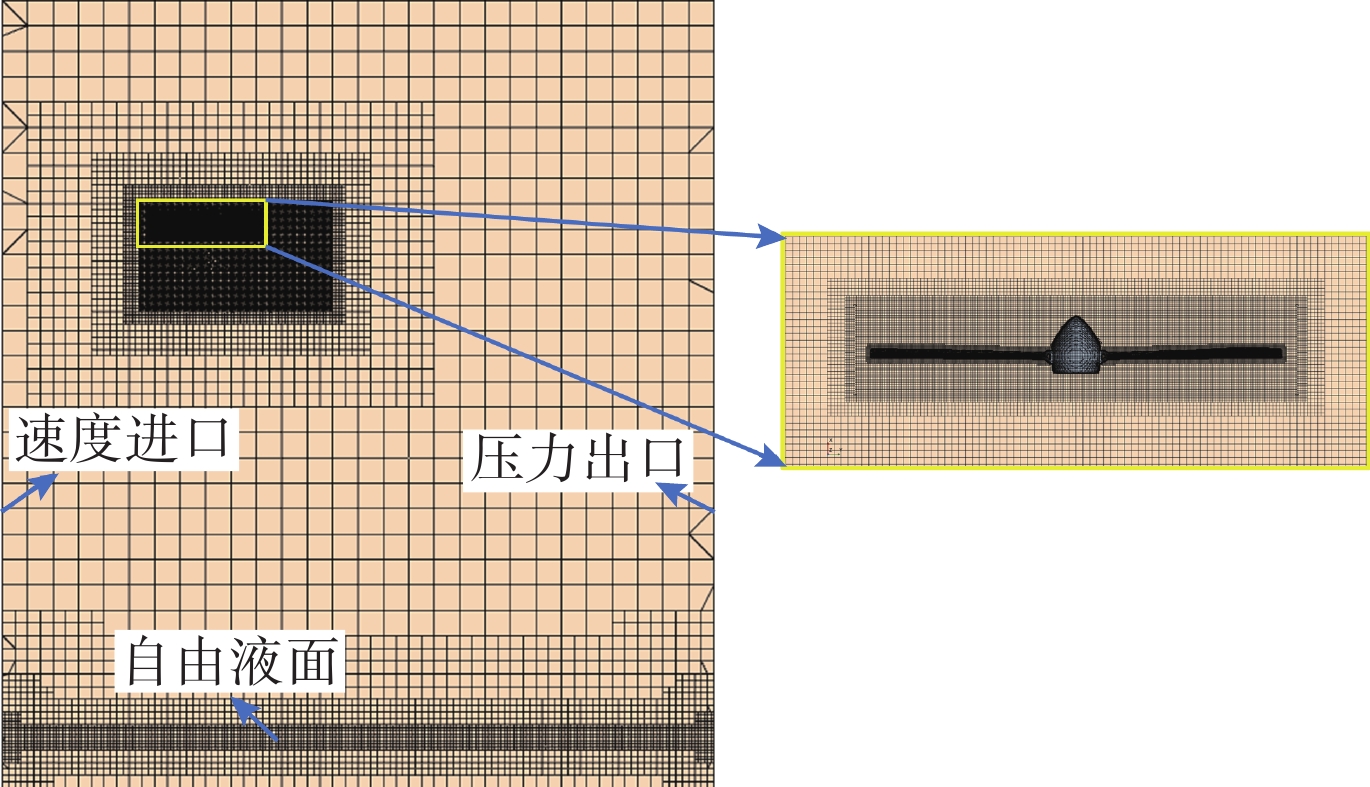
图 5 空中螺旋桨中纵剖面网格划分(单组)
Figure 5. Mesh distribution of the aerial propeller on the central longitudinal section(single)
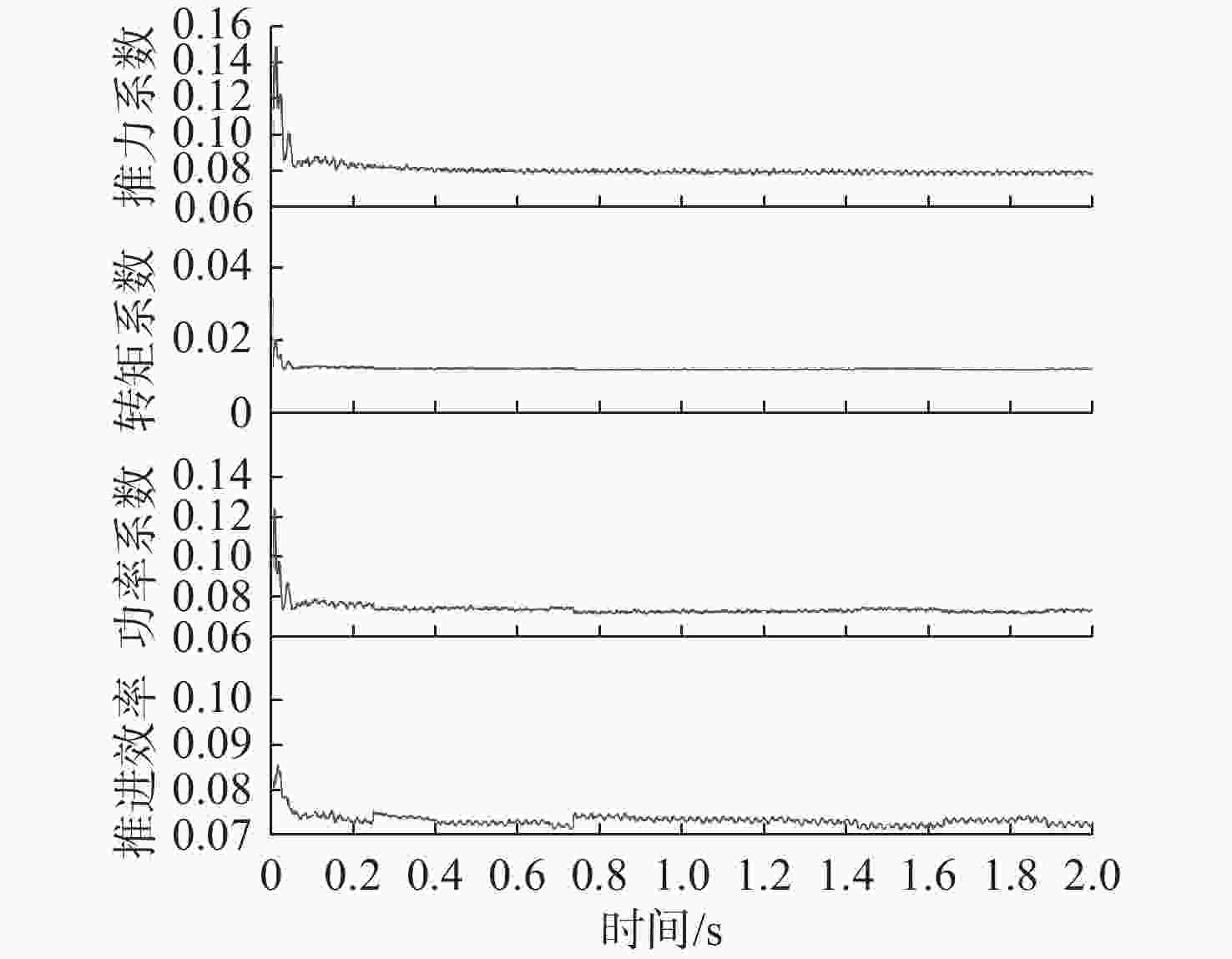
图 8 空中螺旋桨气动性能时历曲线(单组)
Figure 8. Time history curves of aerodynamic performance of the aerial propeller(single)
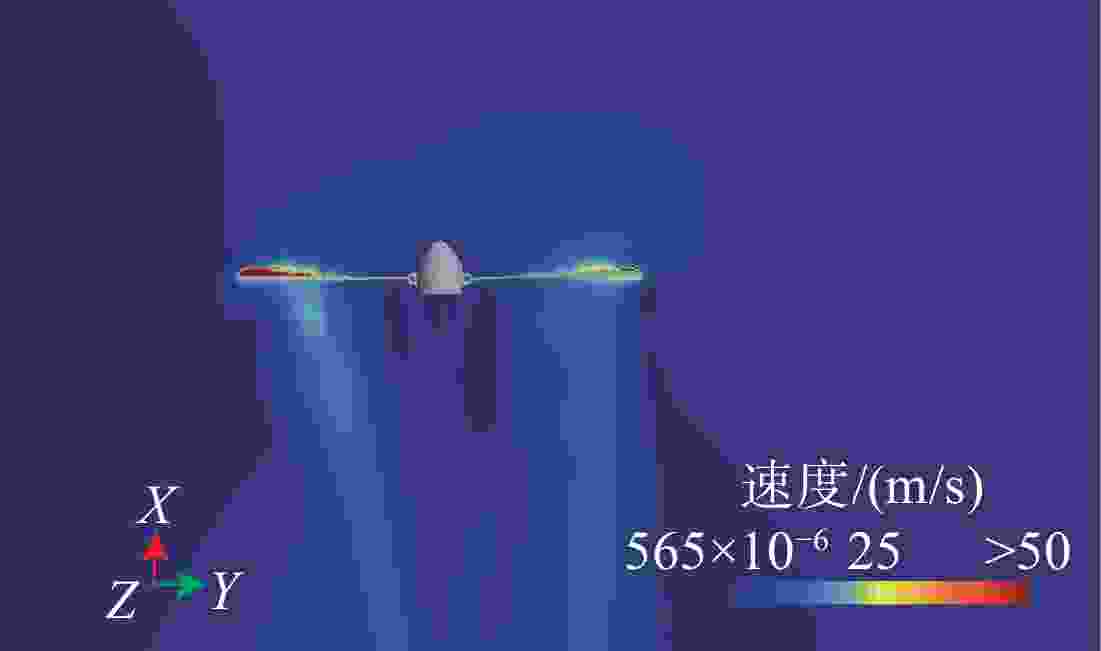
图 10 空中螺旋桨速度场分布(单组)
Figure 10. Velocity field distribution of the aerial propeller (single)
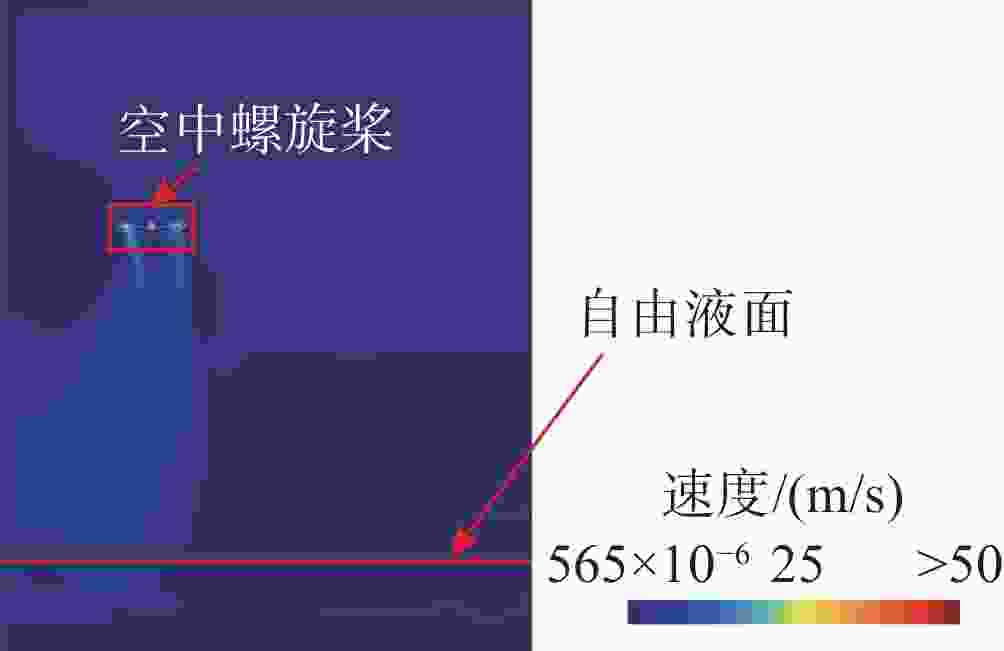
图 11 空中螺旋桨中纵剖面处速度分布(单组)
Figure 11. Velocity distribution on the aerial propeller in the central longitudinal section(single)
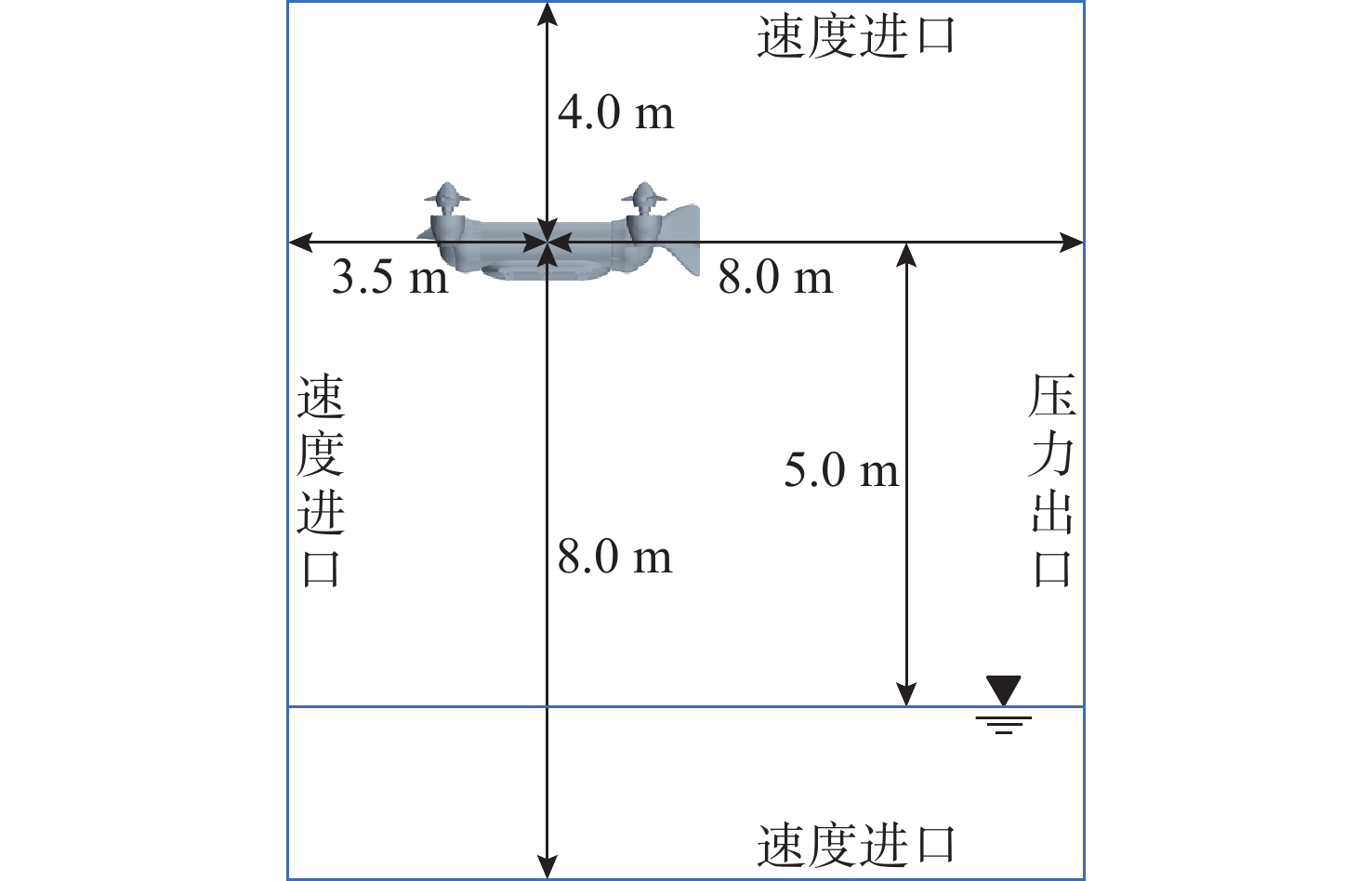
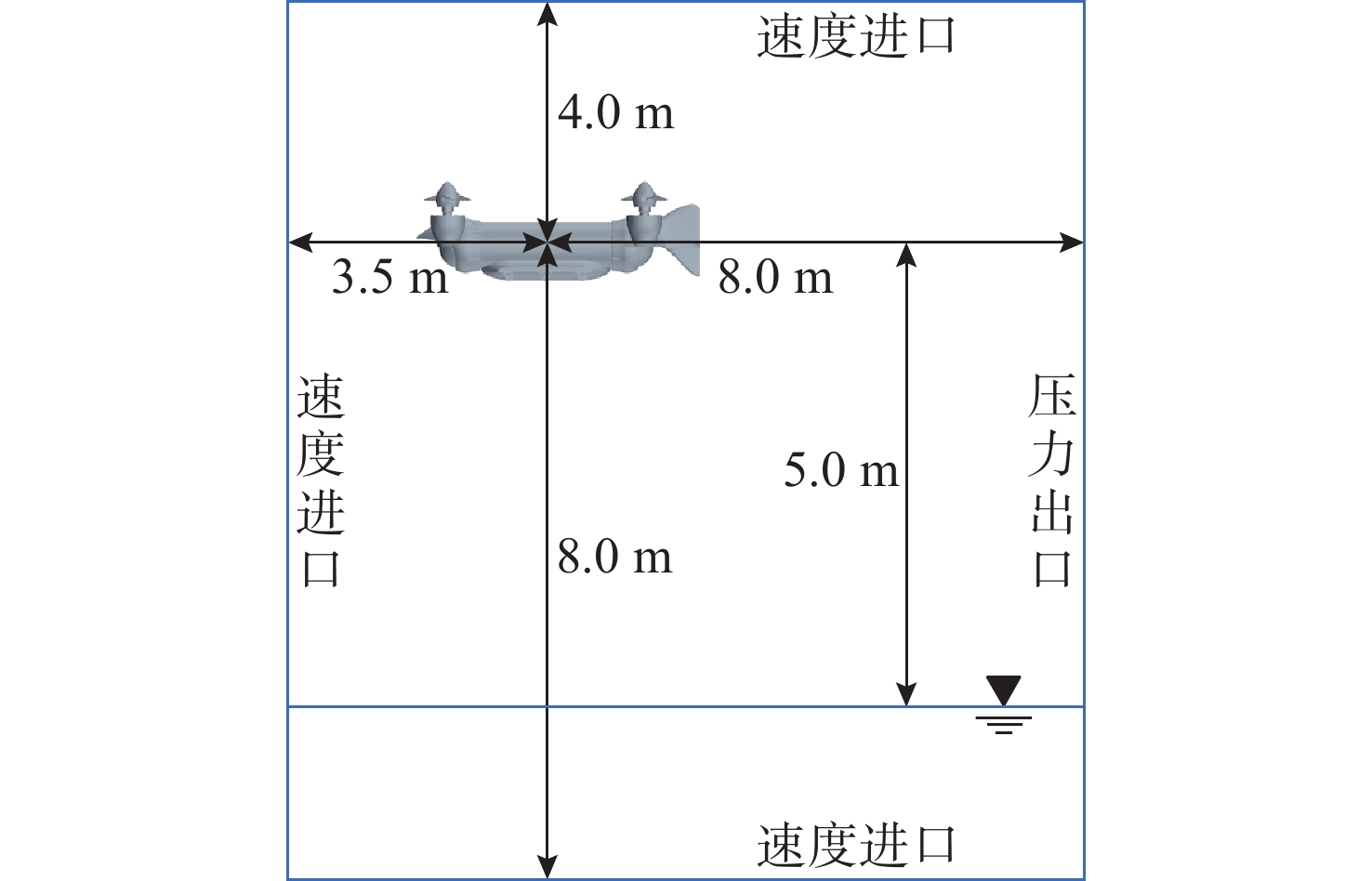
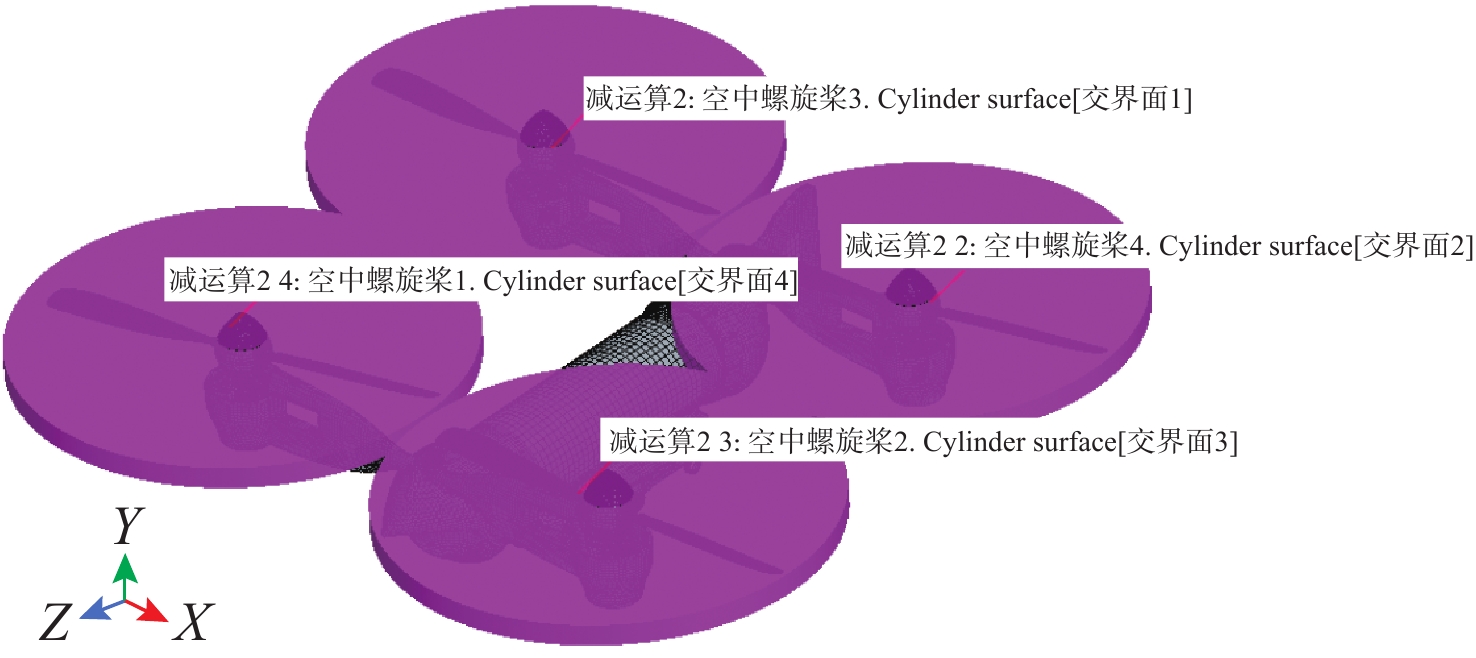
图 12 空中螺旋桨计算域尺寸及边界条件(多组)
Figure 12. Dimensions of the computational domain and boundary conditions for aerial propellers(multiple)
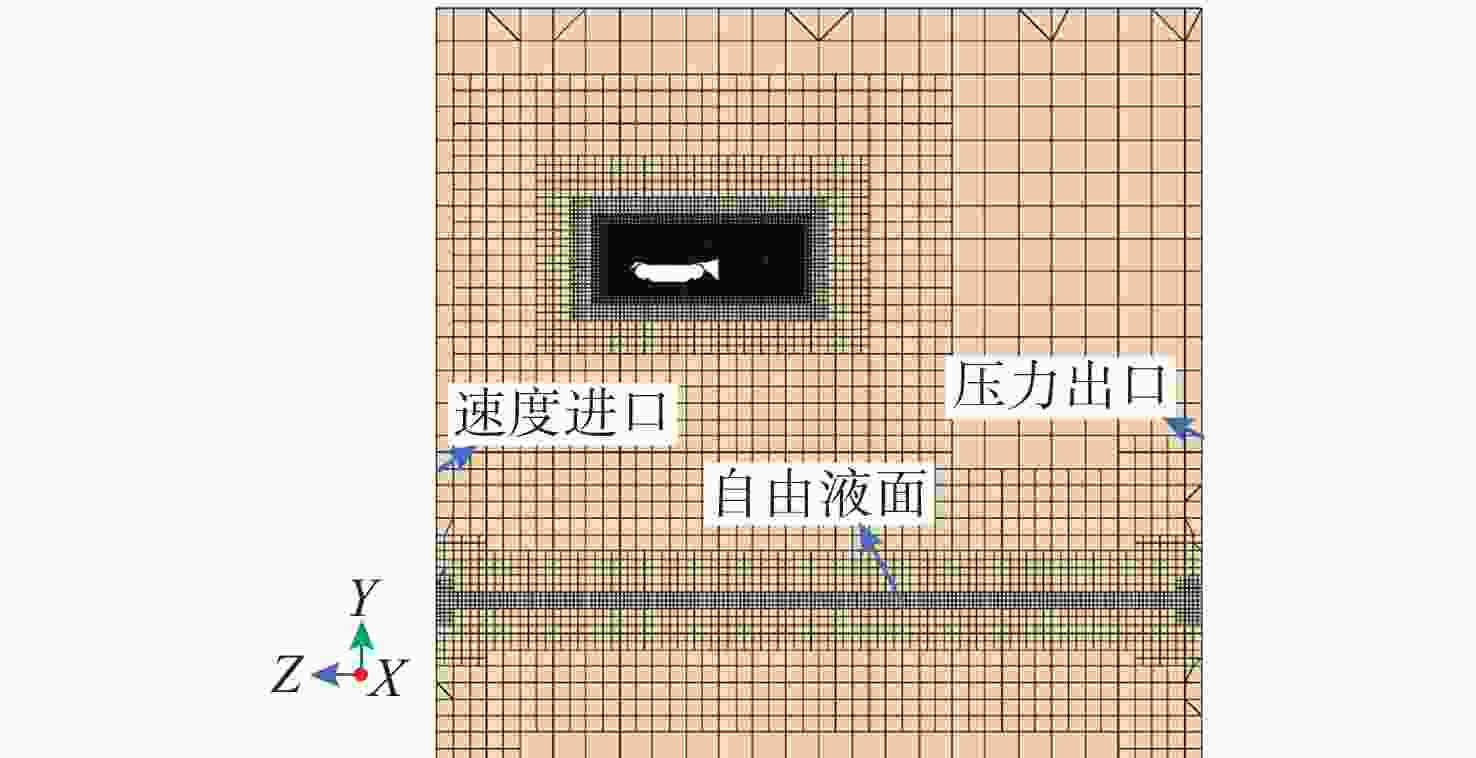
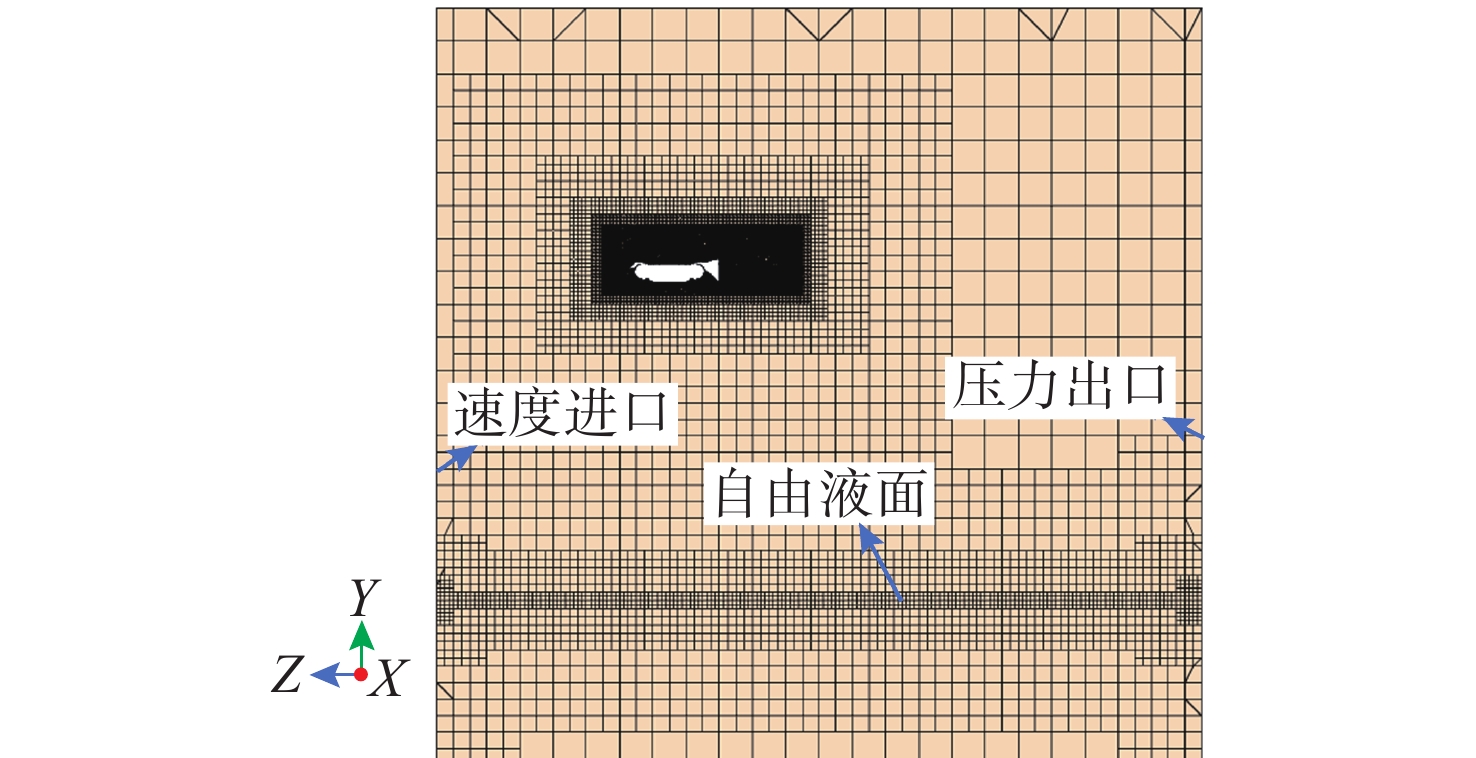
图 13 空中螺旋桨中纵剖面网格划分(多组)
Figure 13. Mesh distribution on aerial propellers in the central longitudinal section(multiple)
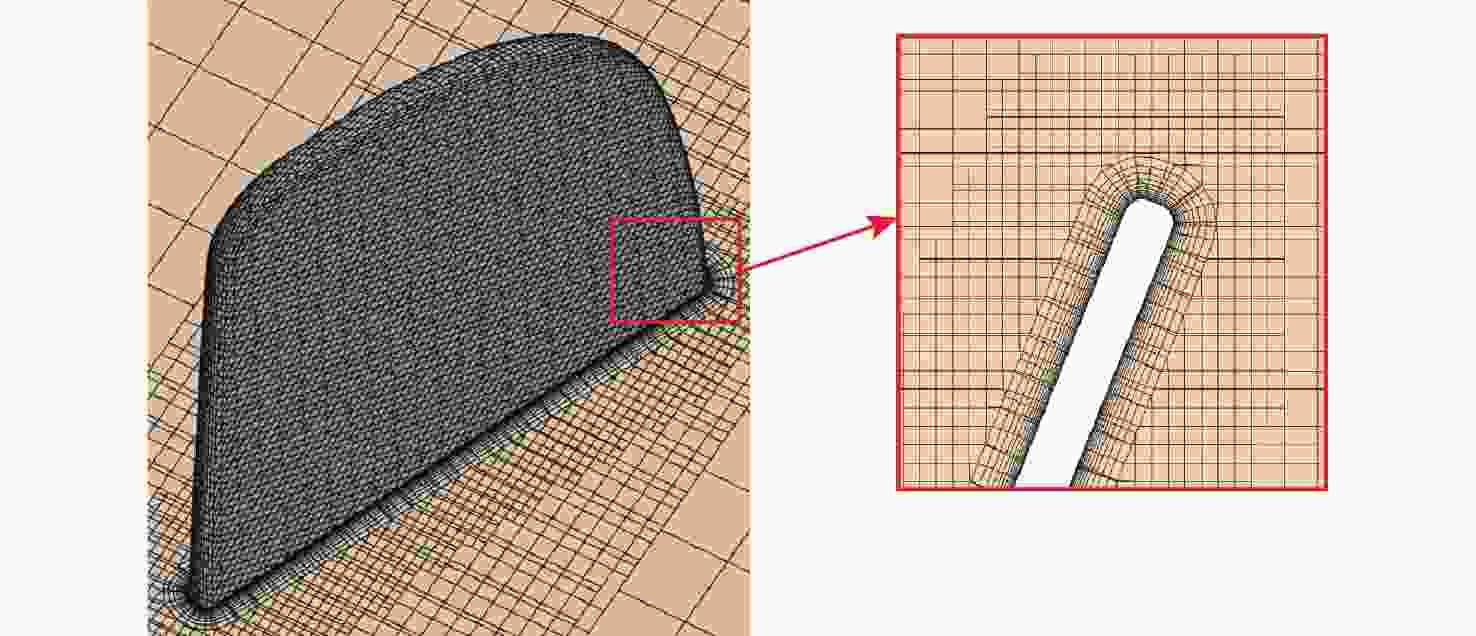
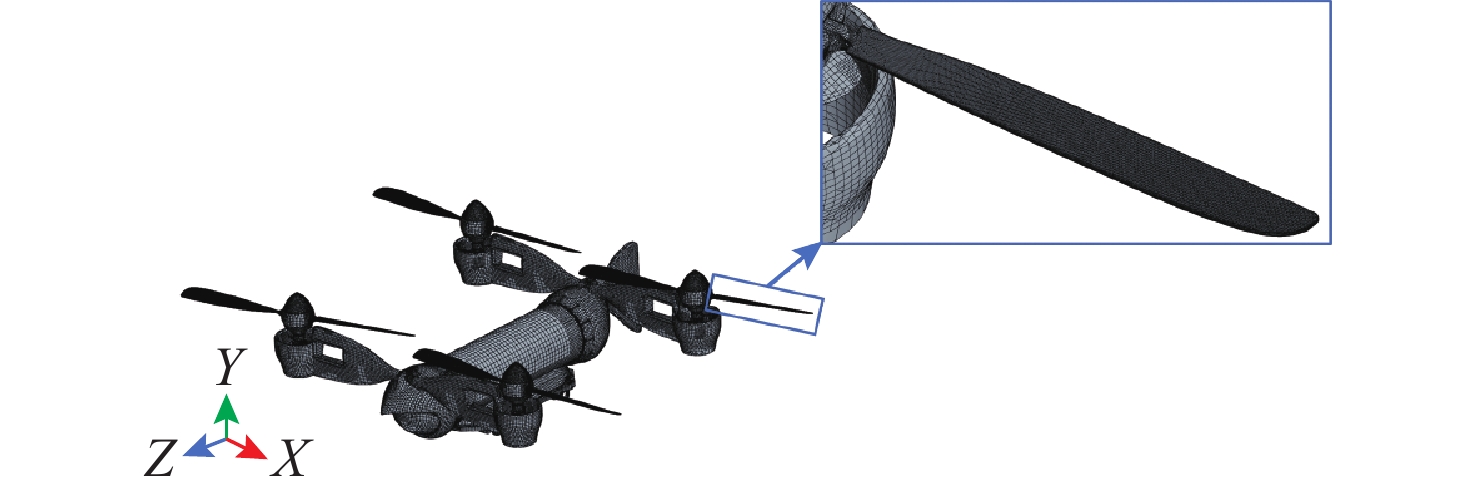
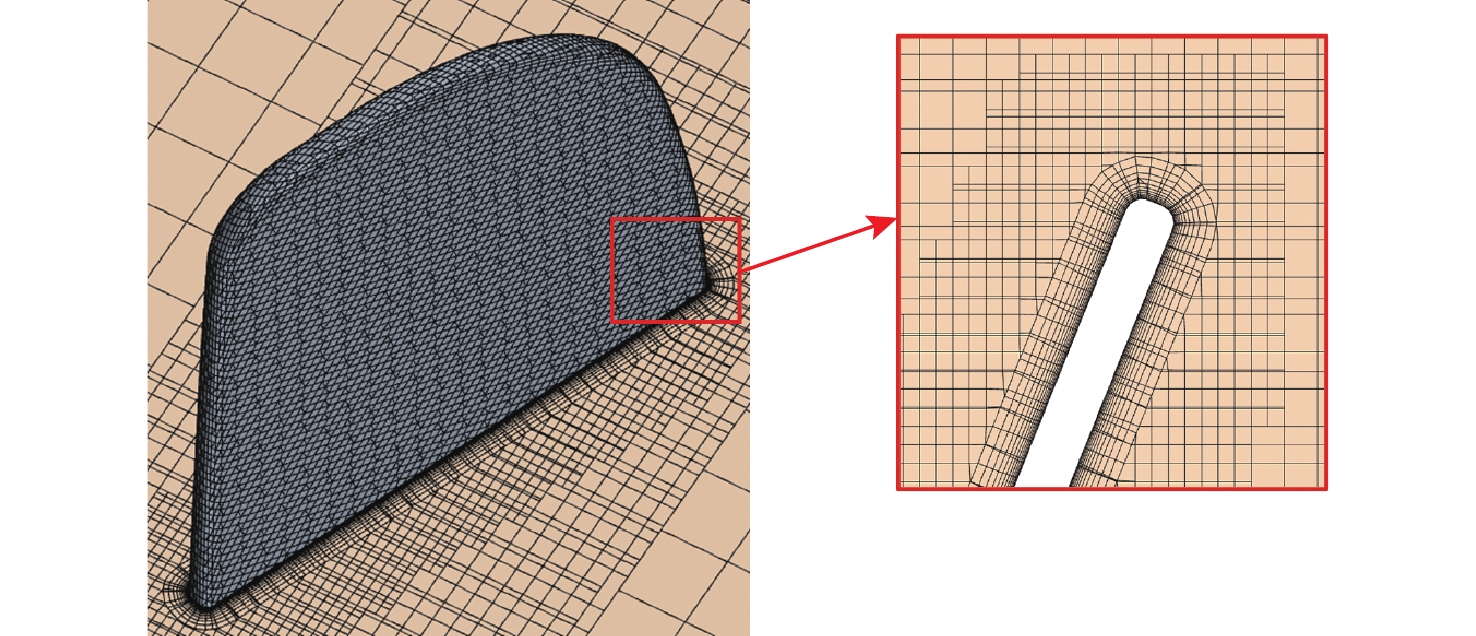
图 15 空中螺旋桨的边界层划分(多组)
Figure 15. Boundary layer division of the aerial propeller(multiple)
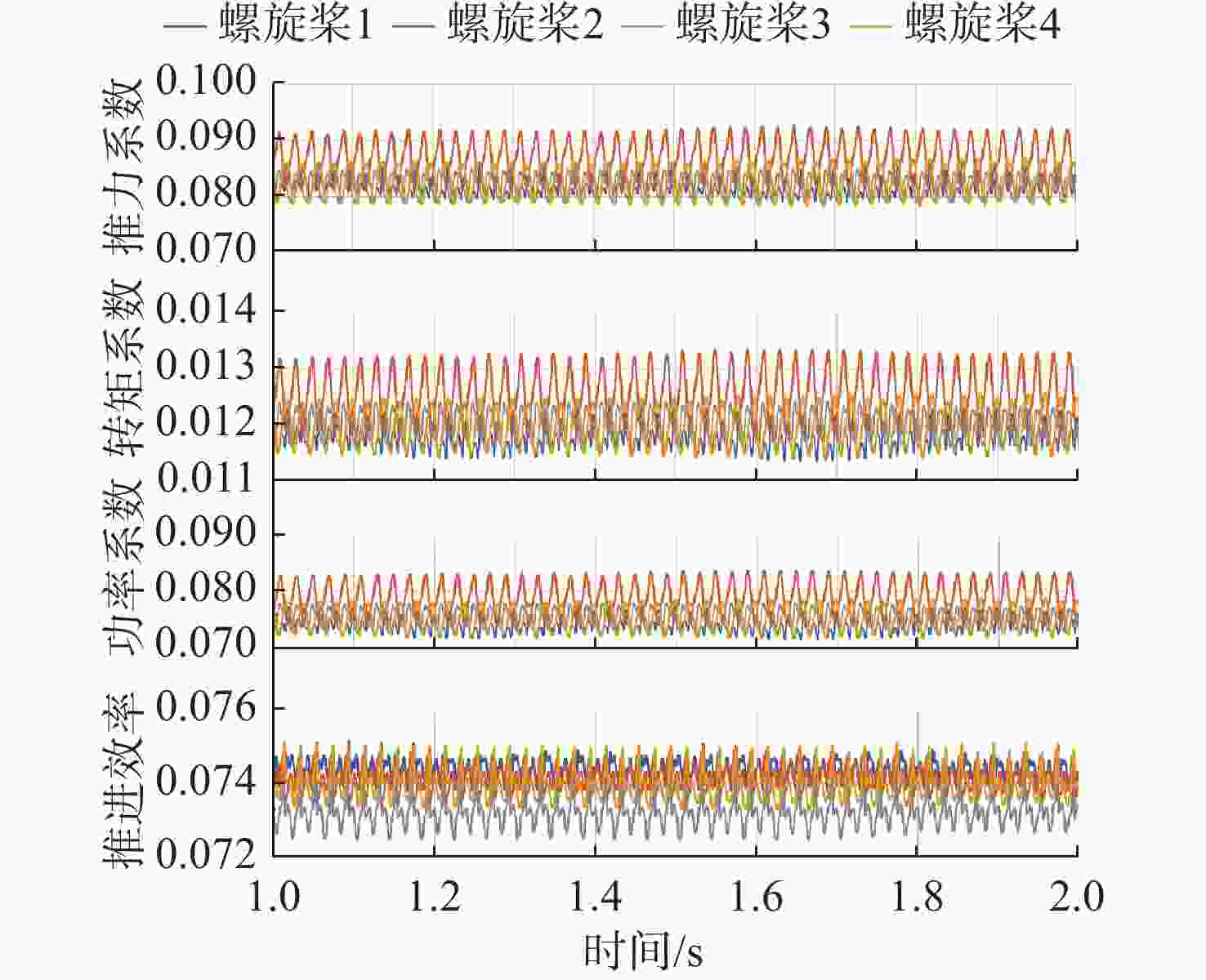
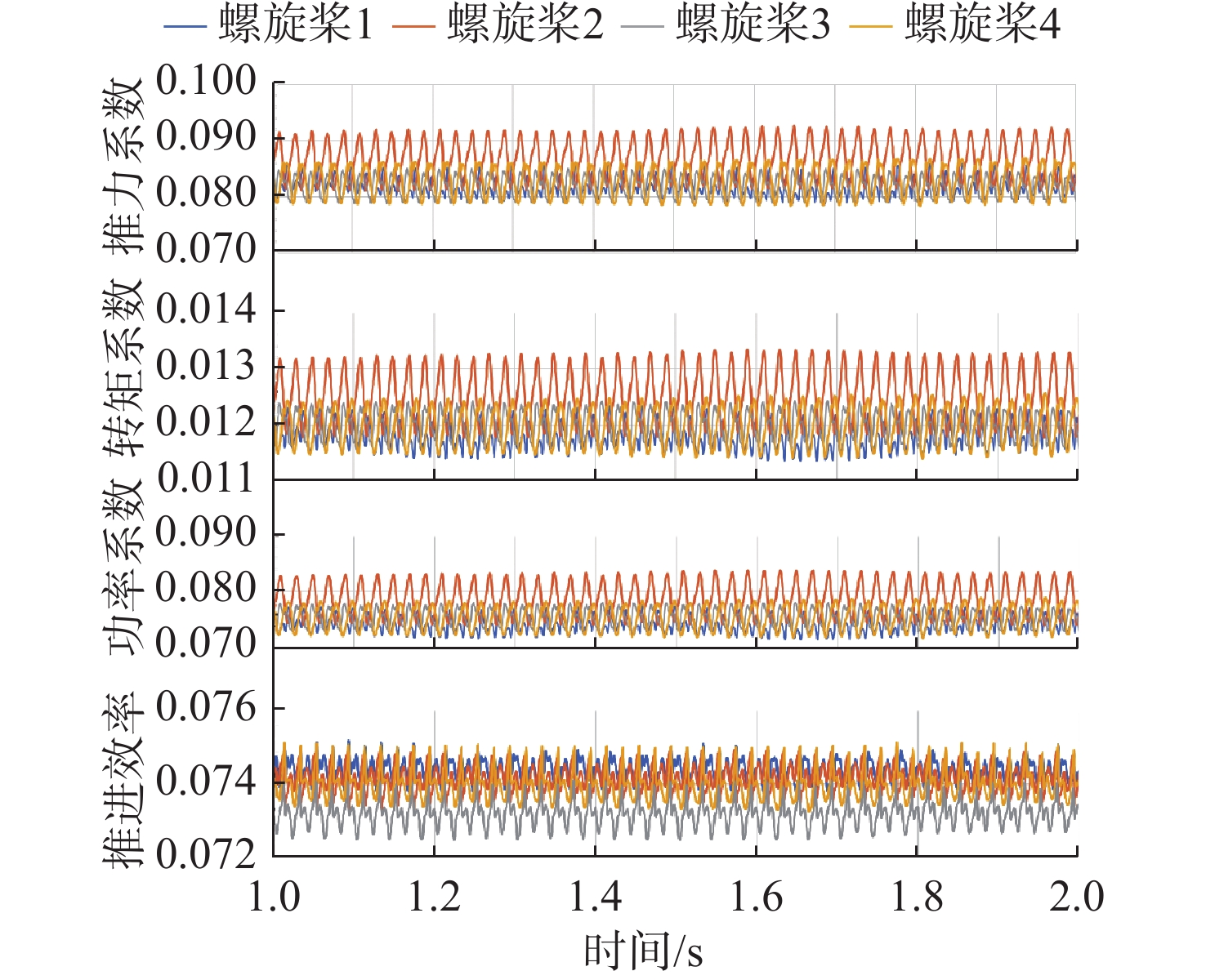
图 18 空中螺旋桨气动性能时历曲线(多组)
Figure 18. Time history curves of aerodynamic performance of aerial propellers(multiple)
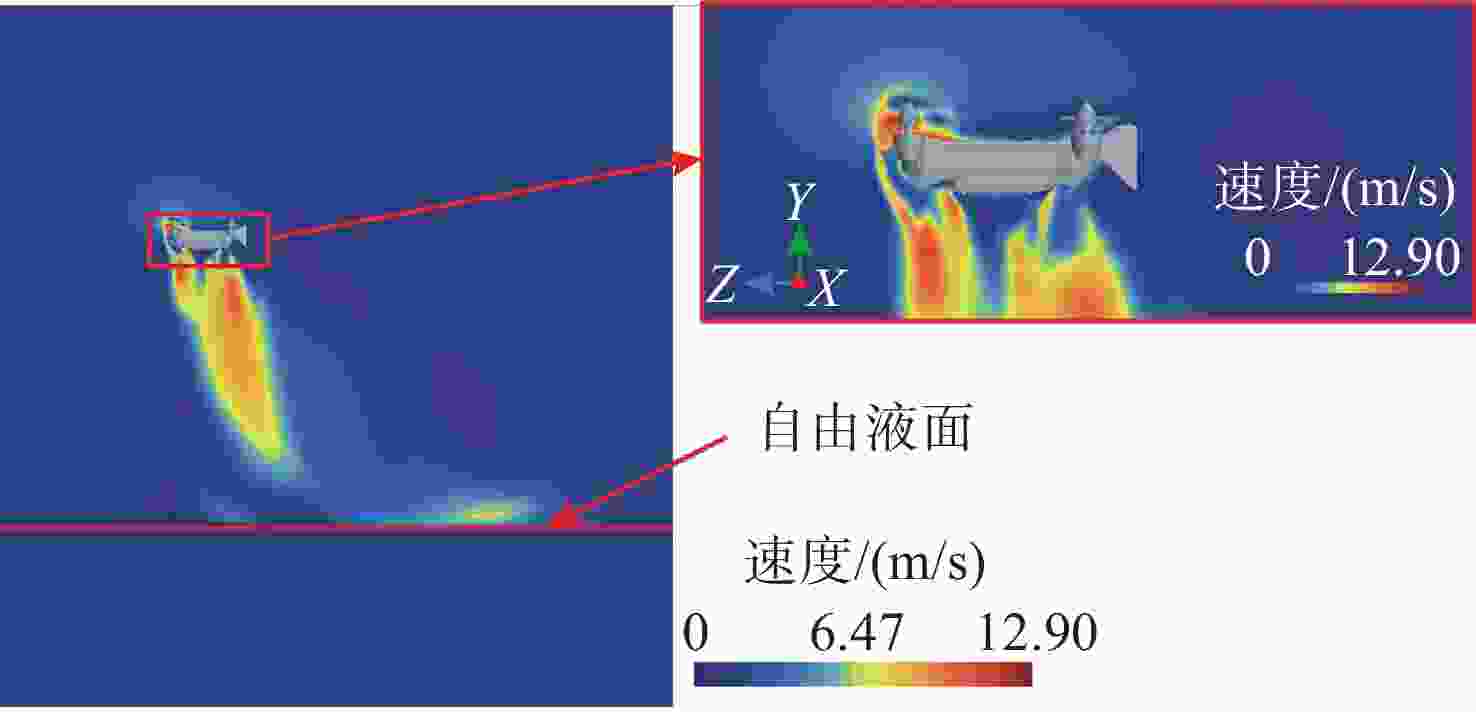
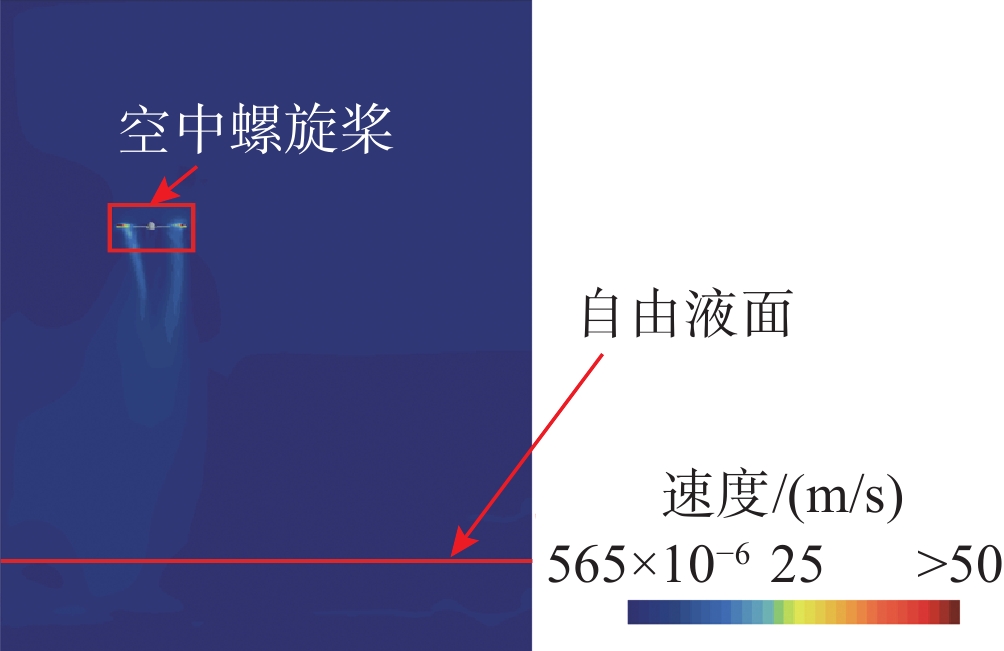
图 20 空中螺旋桨中纵剖面速度场(多组)
Figure 20. Velocity field of aerial propellers in the central longitudinal section(multiple)
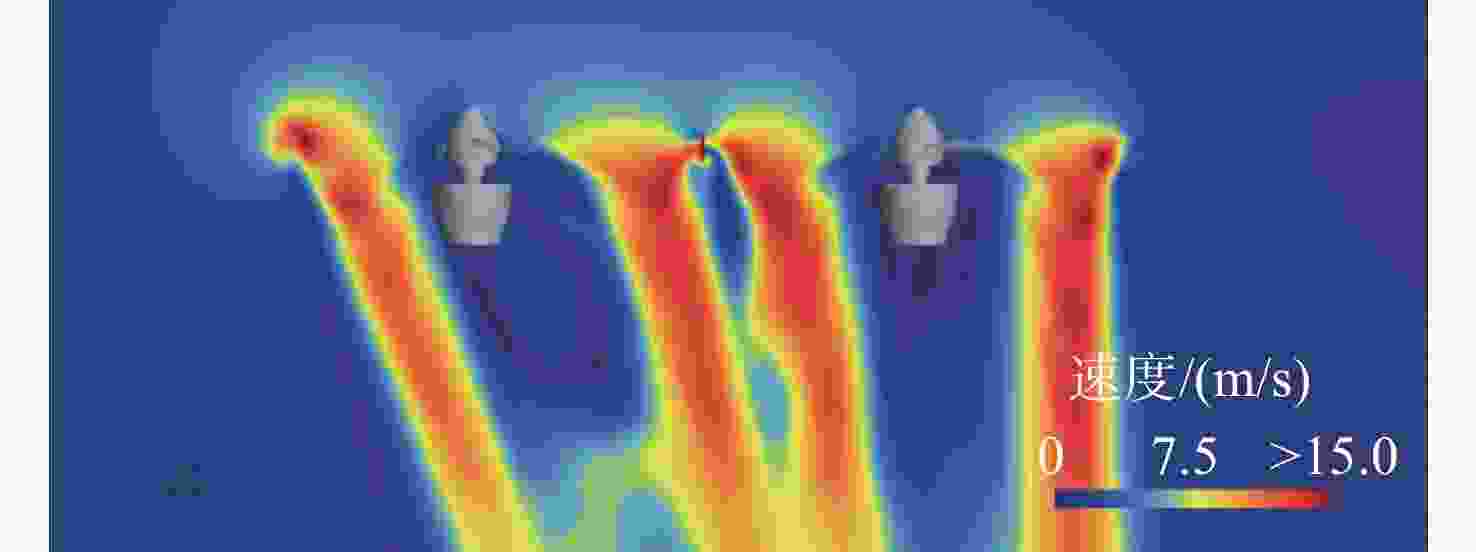
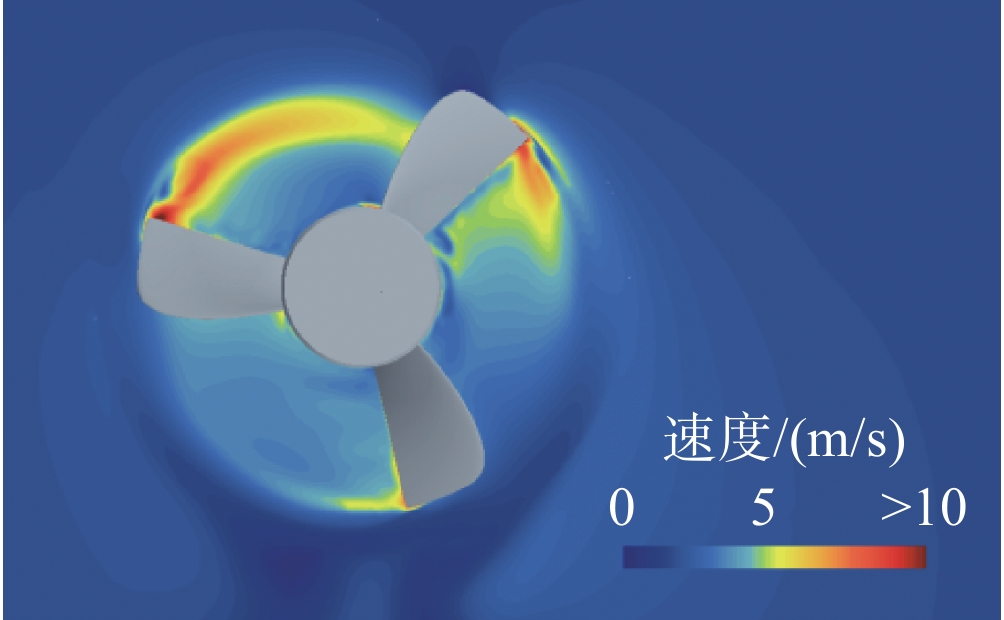
图 21 空中螺旋桨位置速度场(多组)
Figure 21. Velocity field at aerial propellers position (multiple)
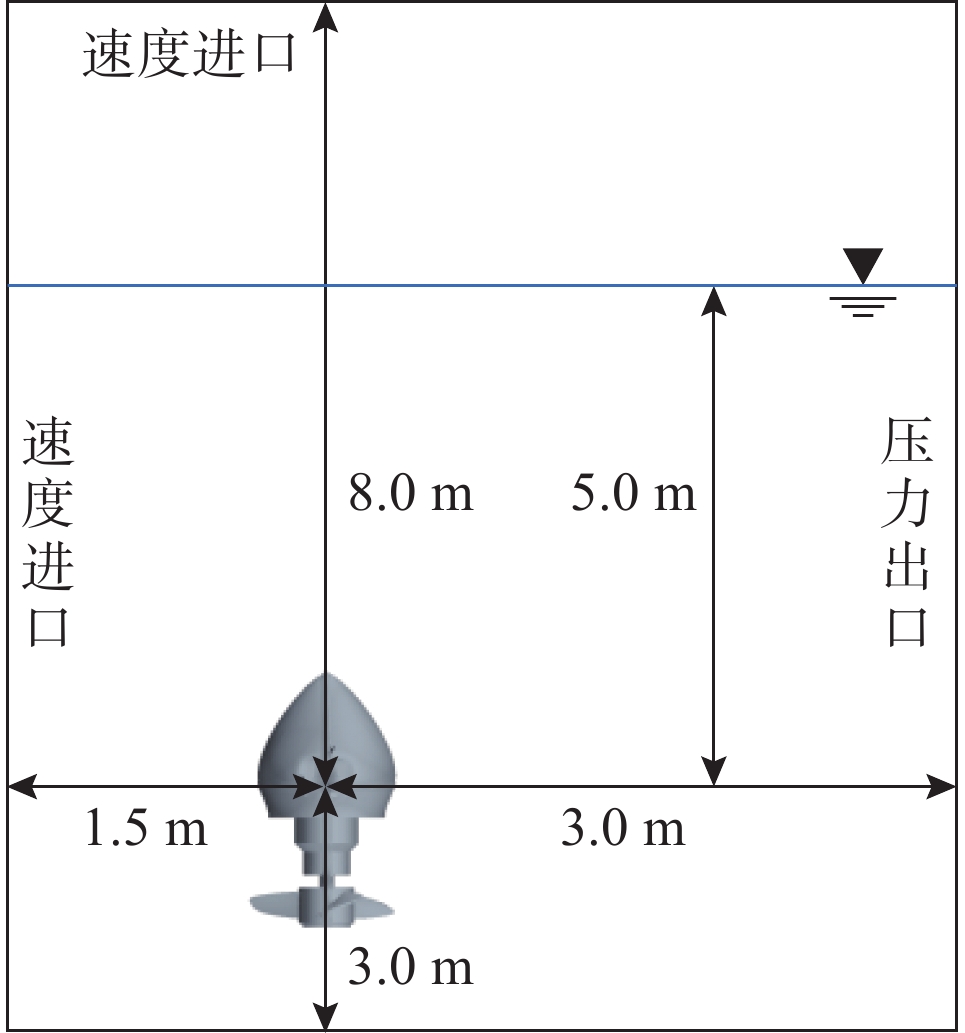
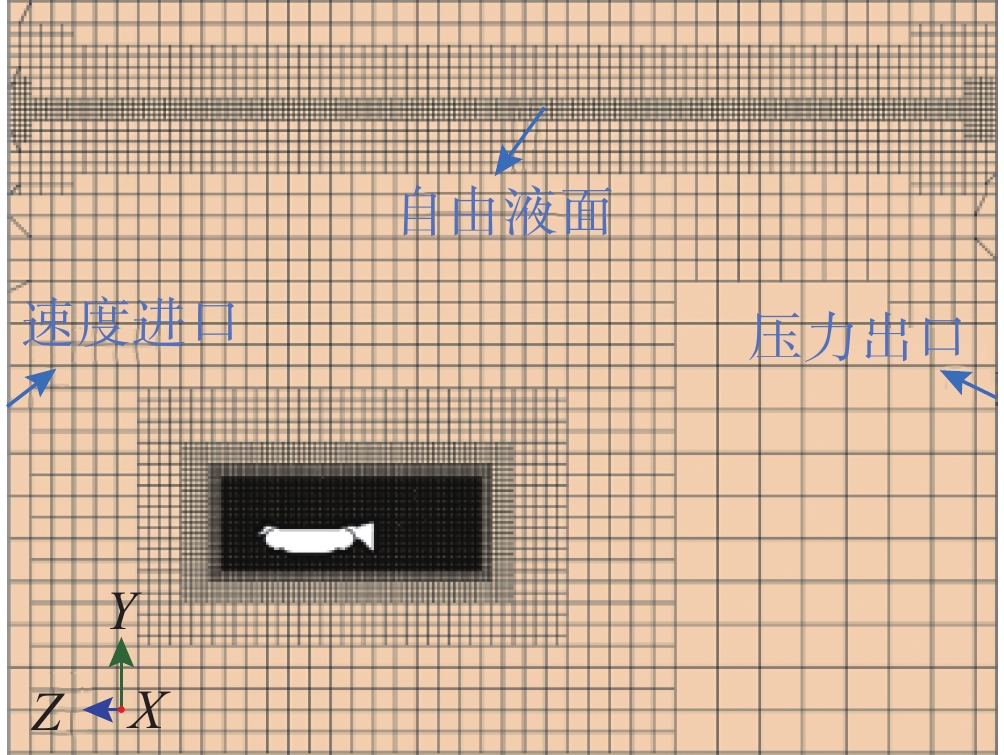
图 22 水下螺旋桨计算域尺寸和边界条件(单组)
Figure 22. Dimensions of the computational domain and boundary conditions for the underwater propeller (single)
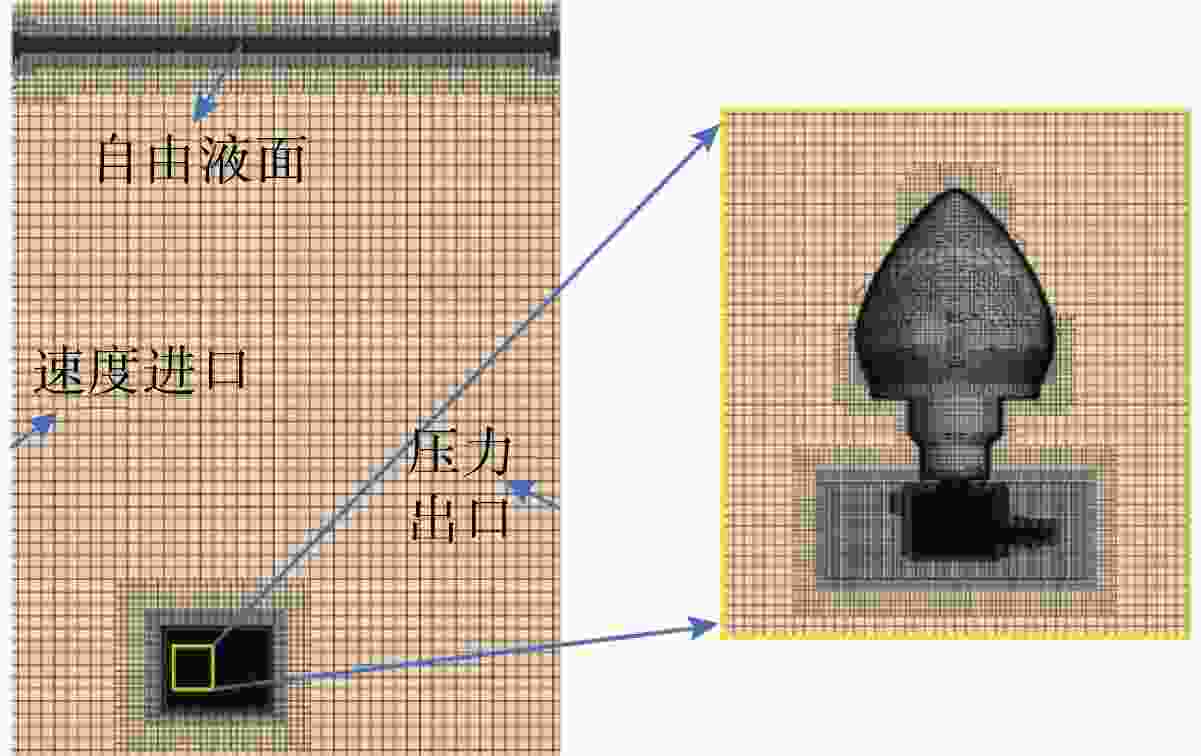
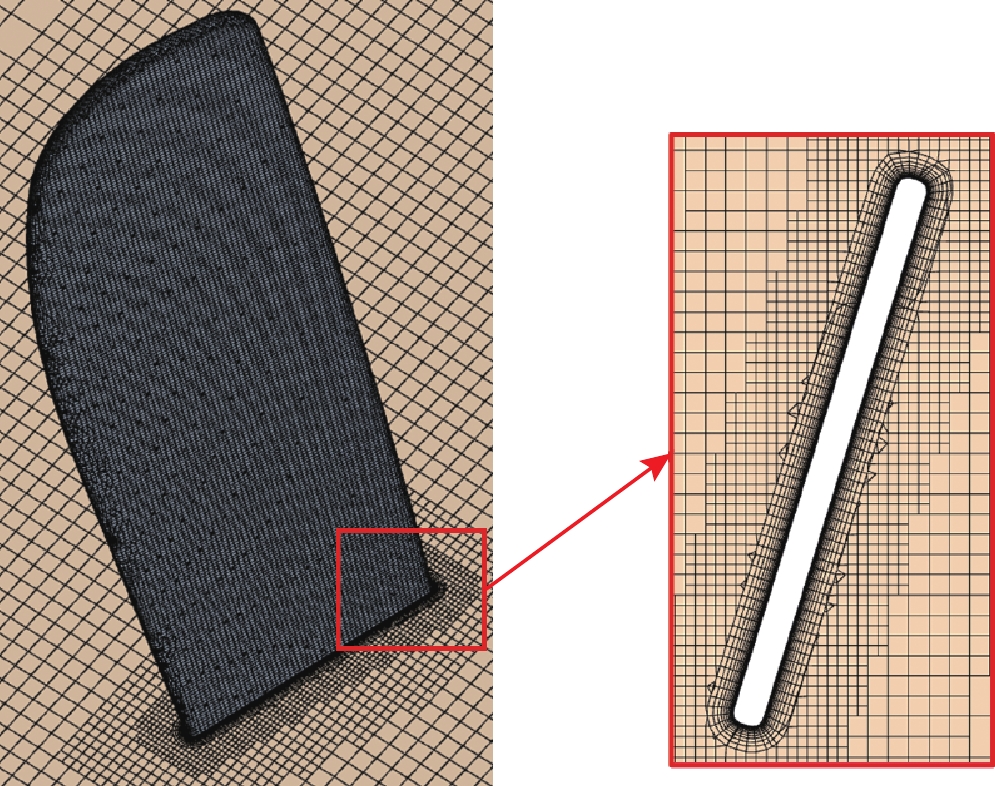
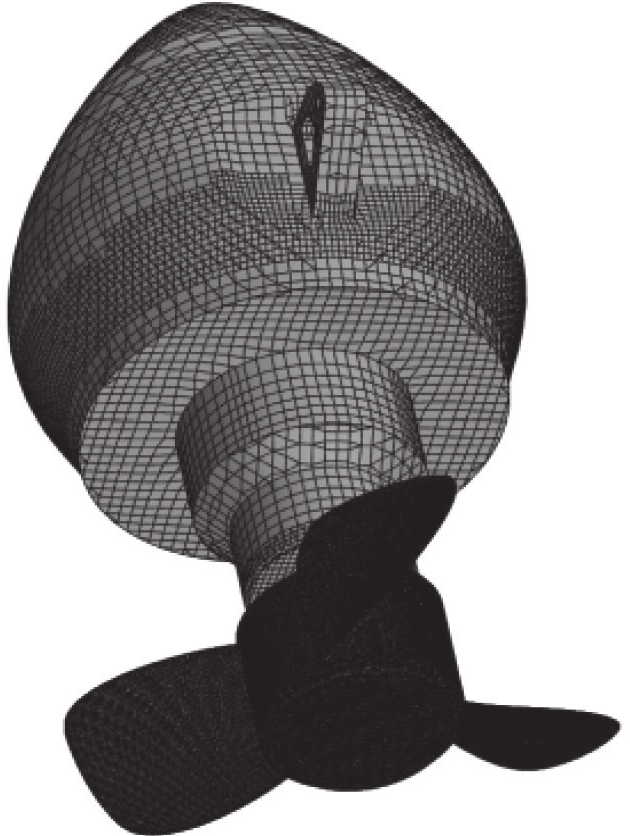
图 23 水下螺旋桨中纵剖面网格划分(单组)
Figure 23. Mesh generation of the underwater propeller in the central longitudinal section(single)
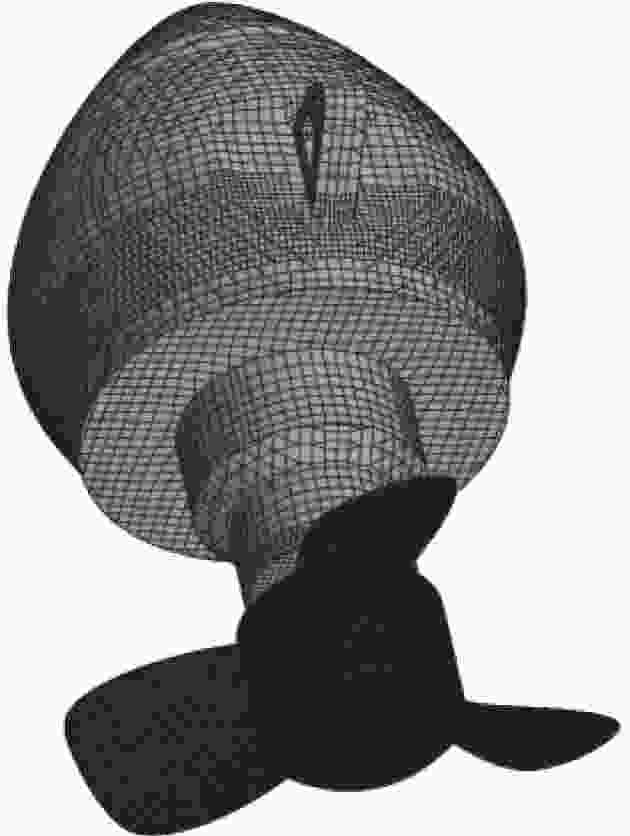
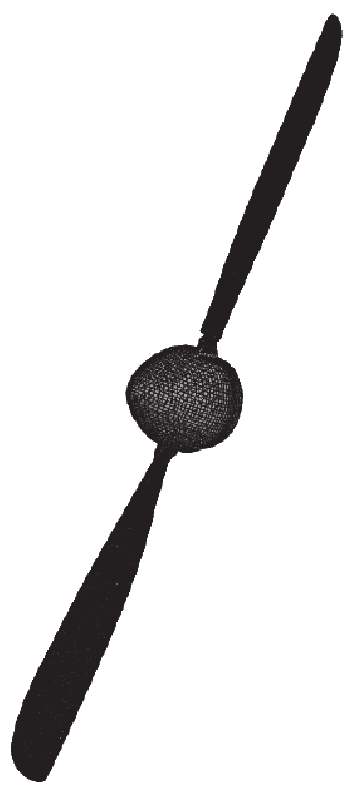
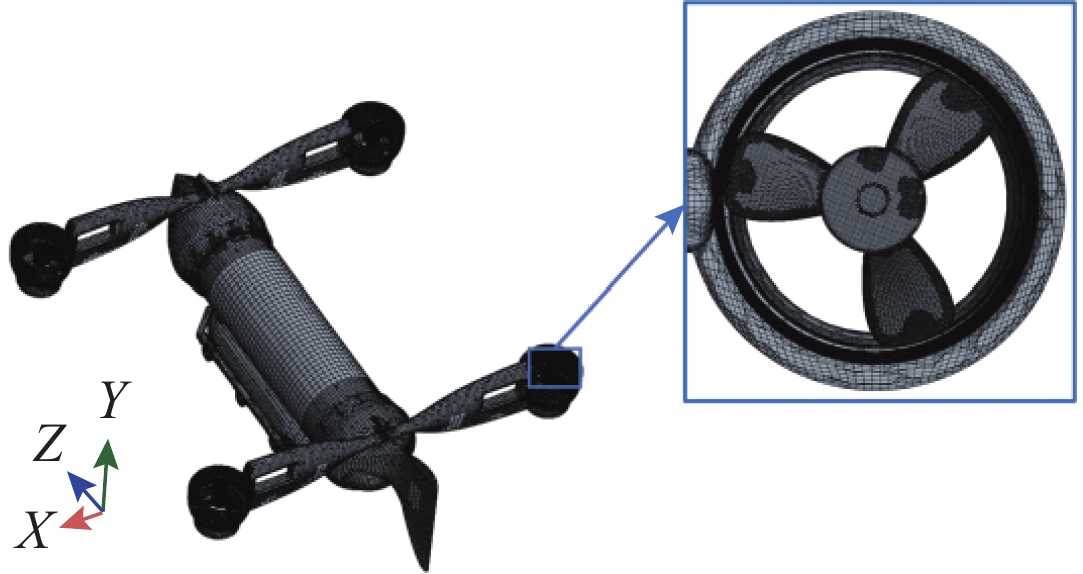
图 24 水下螺旋桨表面网格划分(单组)
Figure 24. Mesh generation on the surface of the underwater propeller(single)
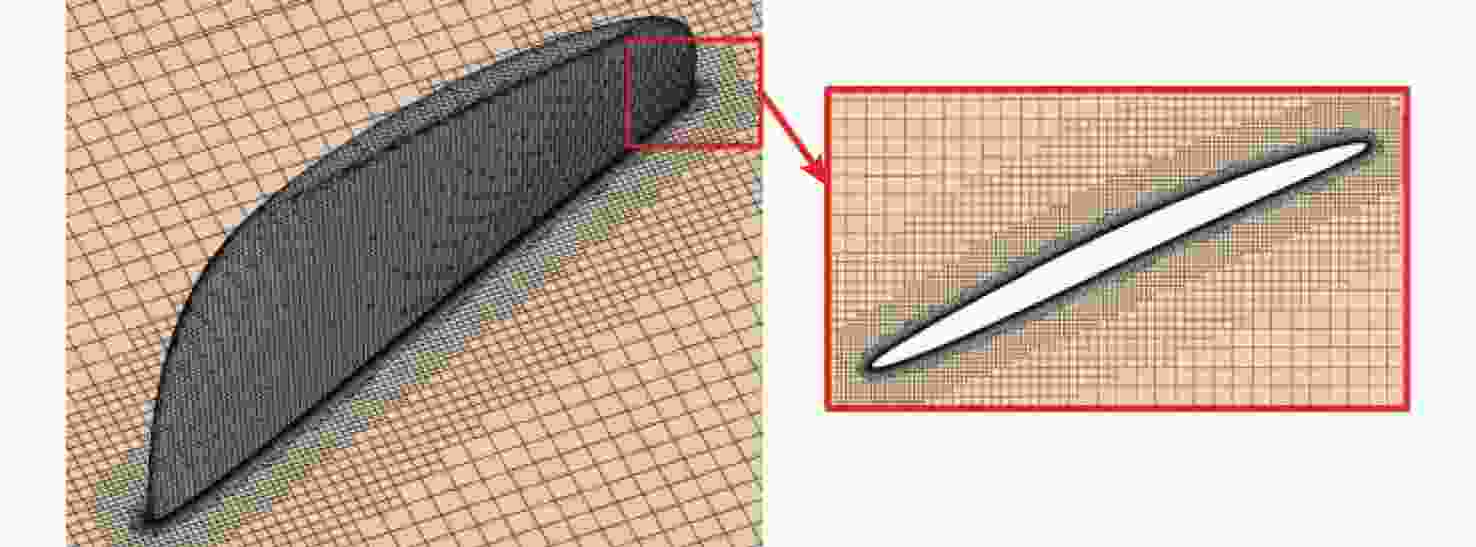
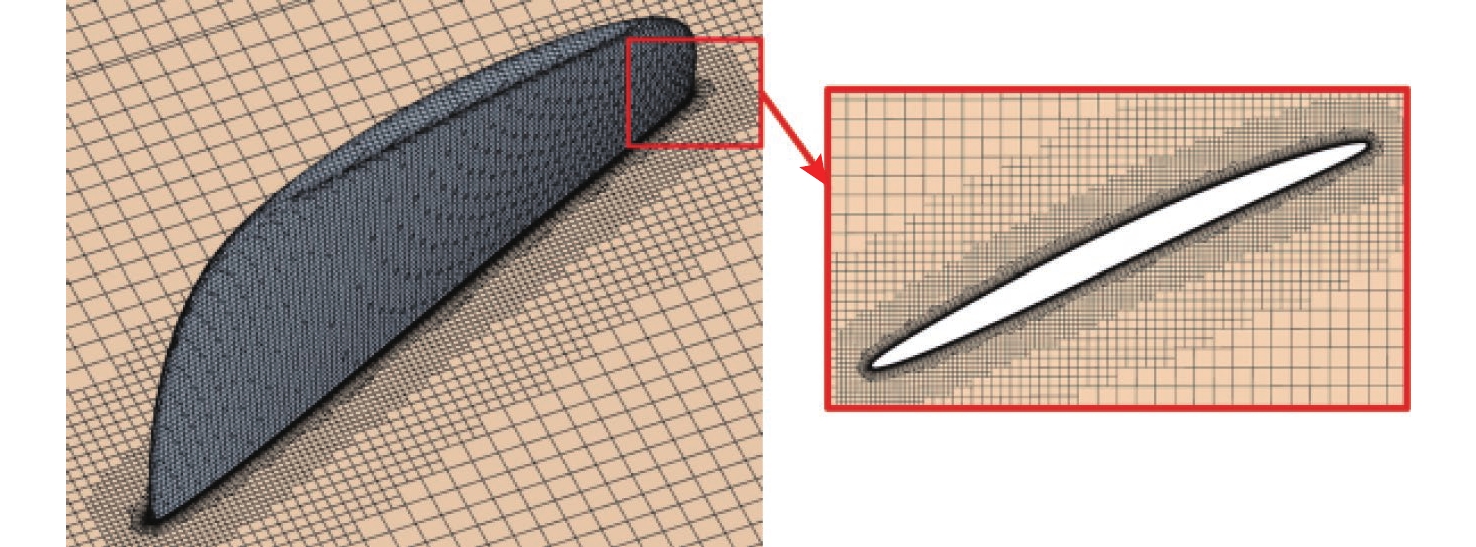
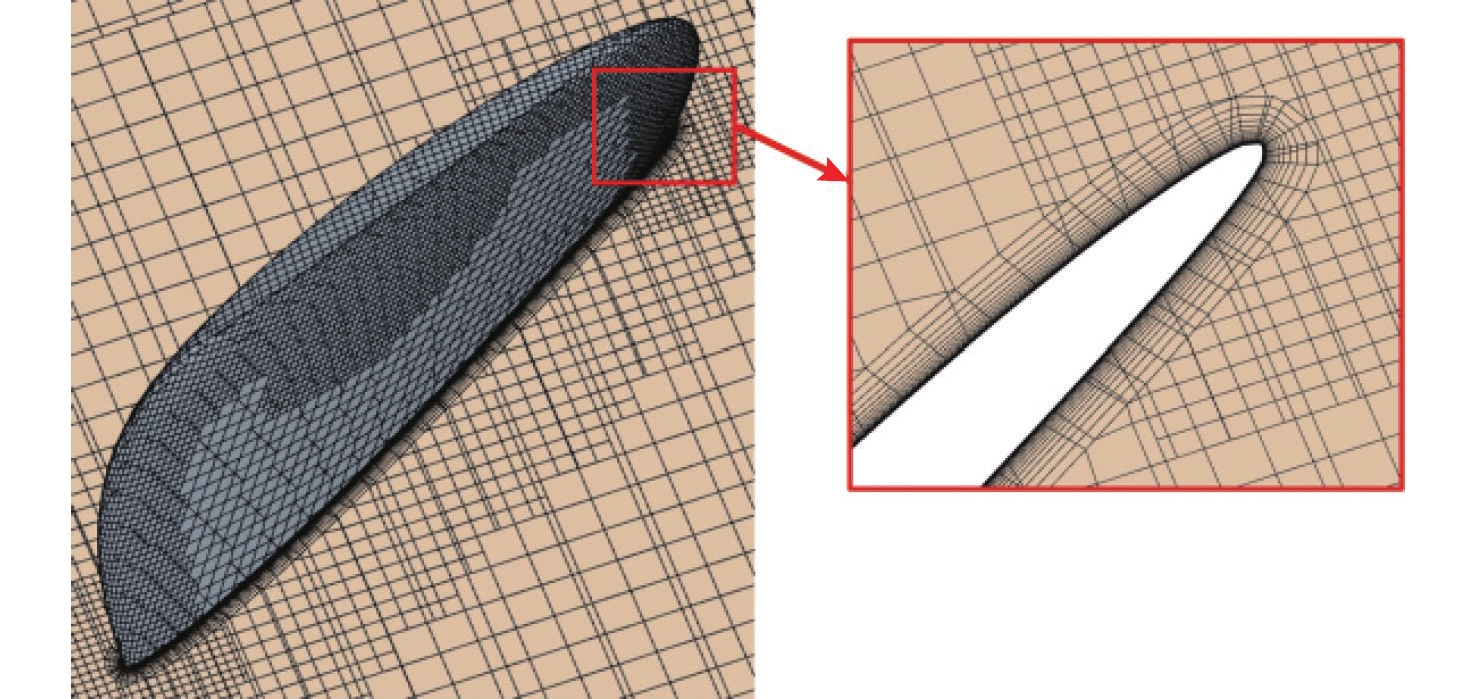
图 25 水下螺旋桨边界层划分(单组)
Figure 25. Boundary layer division of the underwater propeller(single)
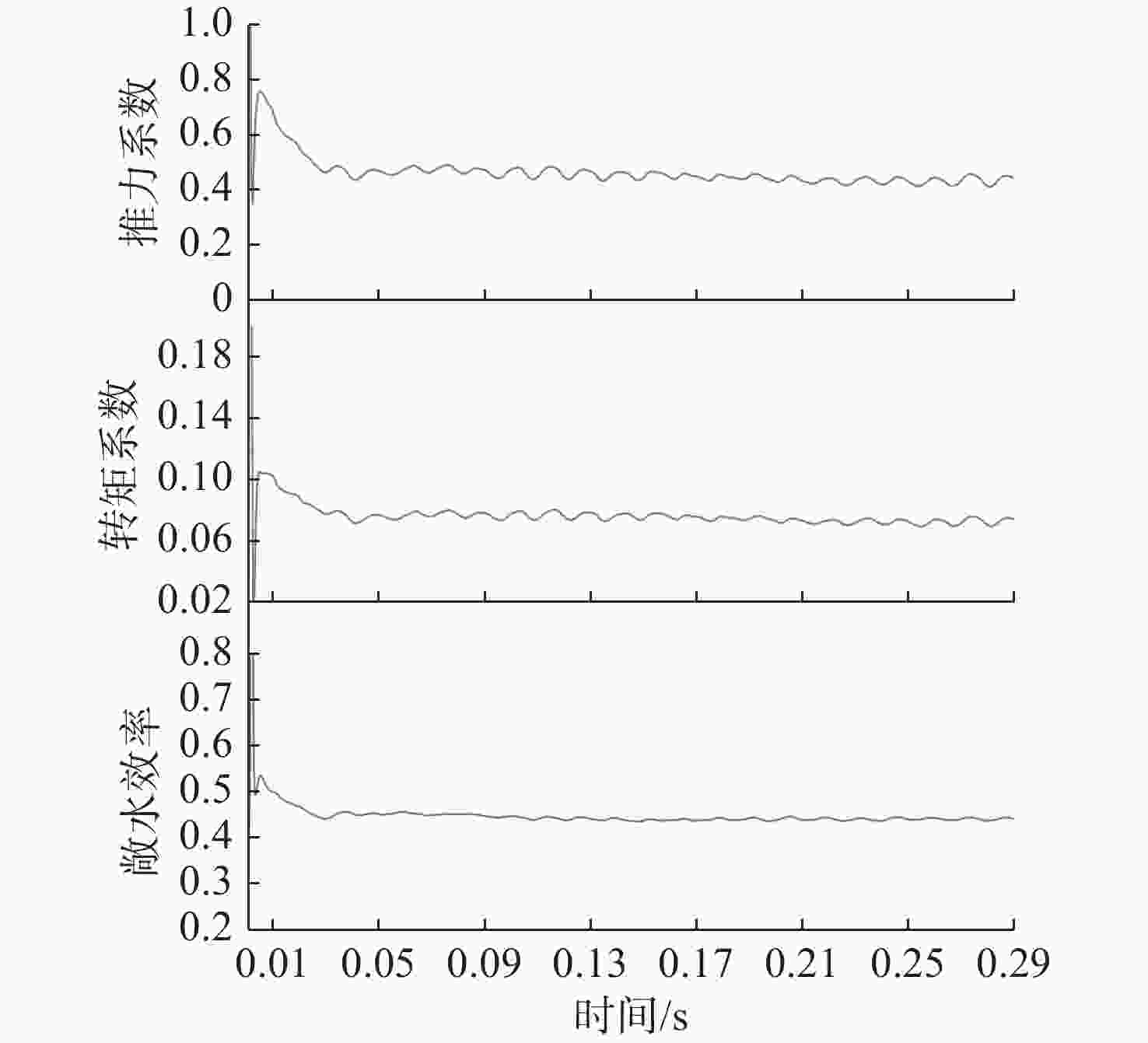
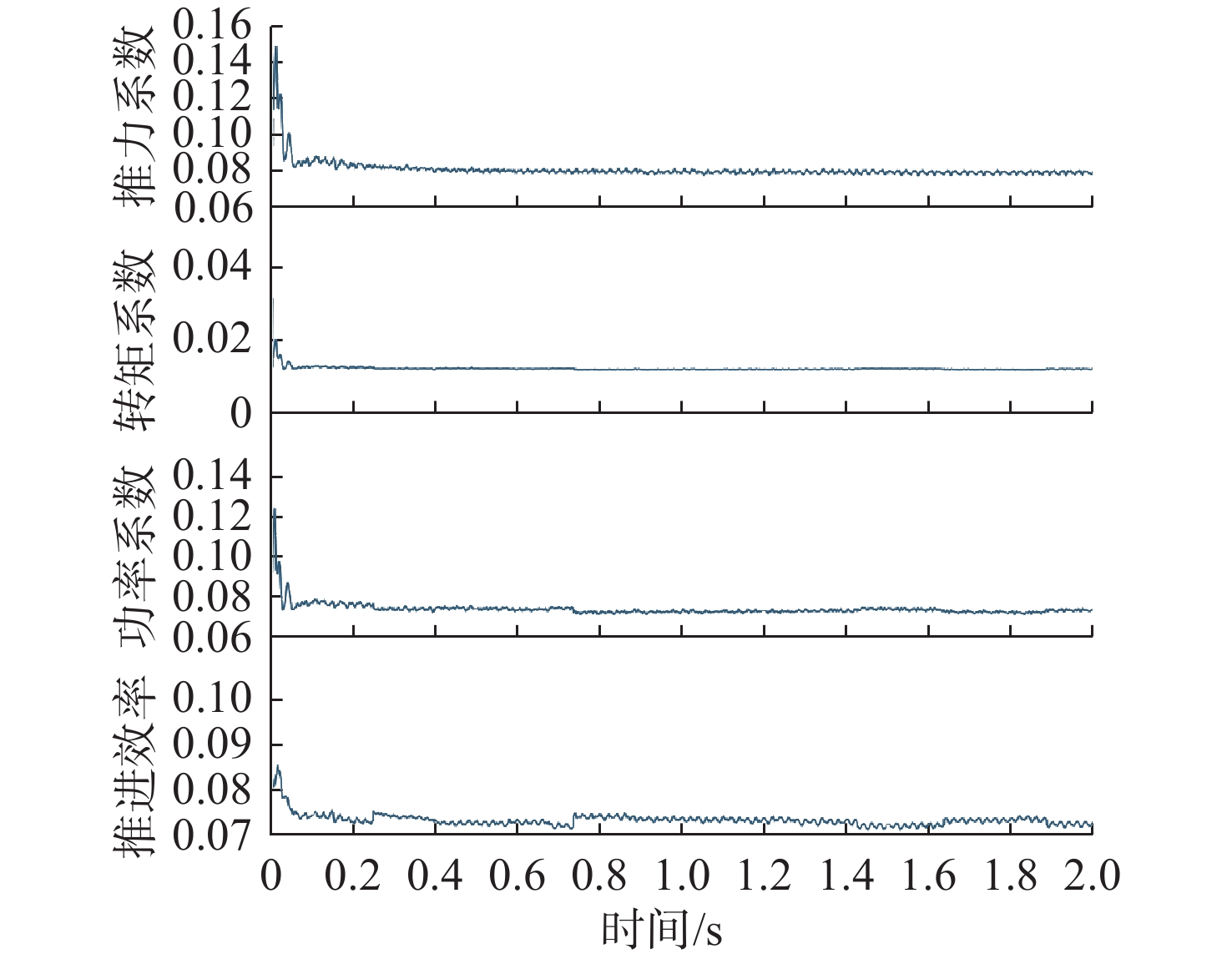
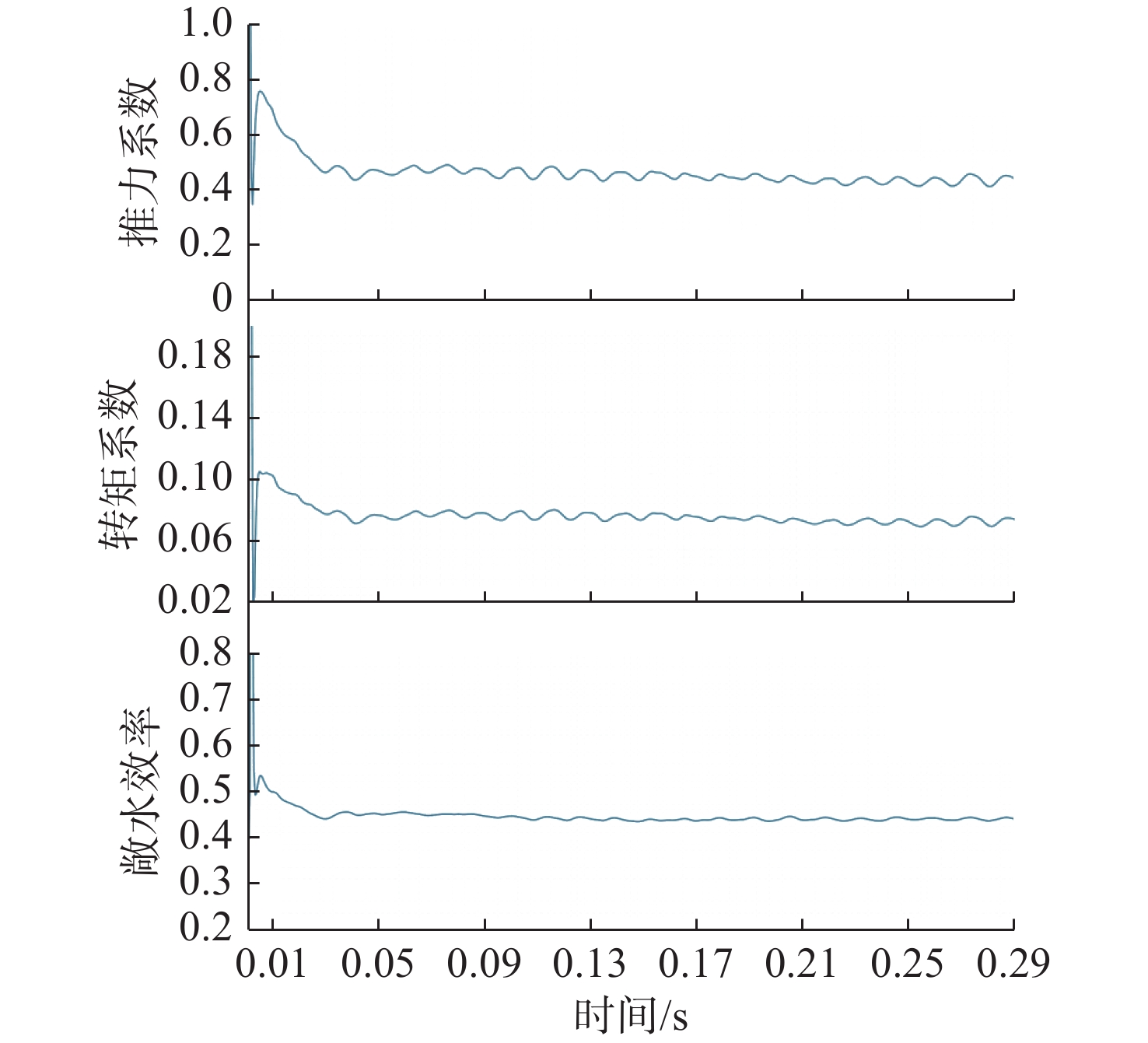
图 26 水下螺旋桨水动力性能时历曲线(单组)
Figure 26. Time history curves of hydrodynamic performance of the underwater propeller
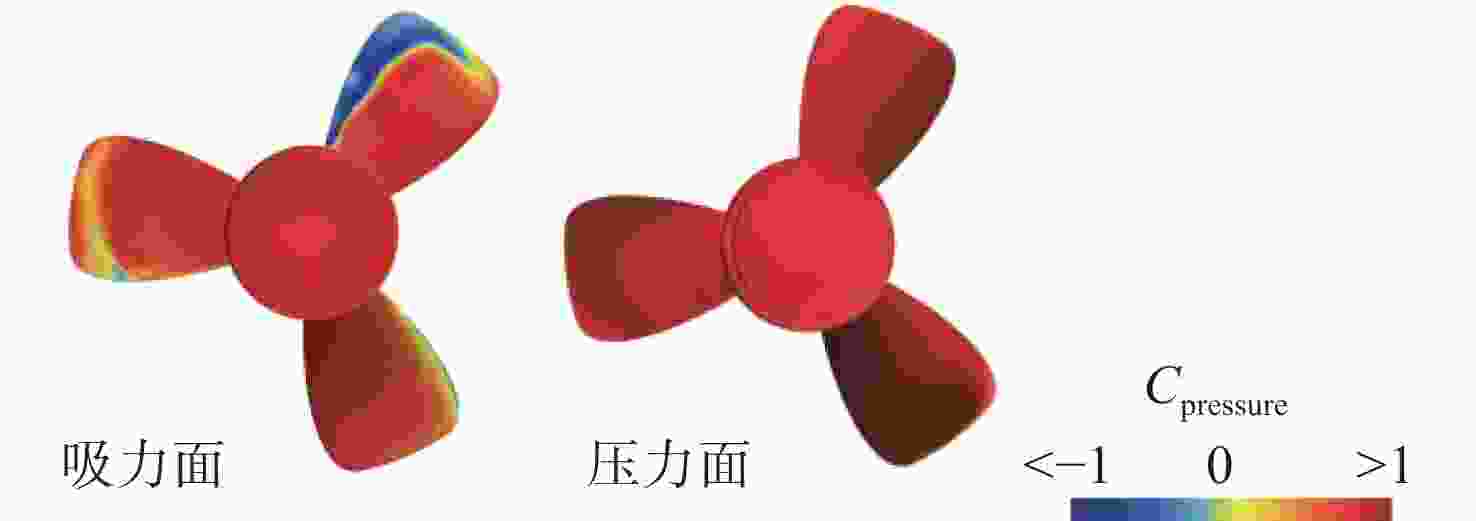
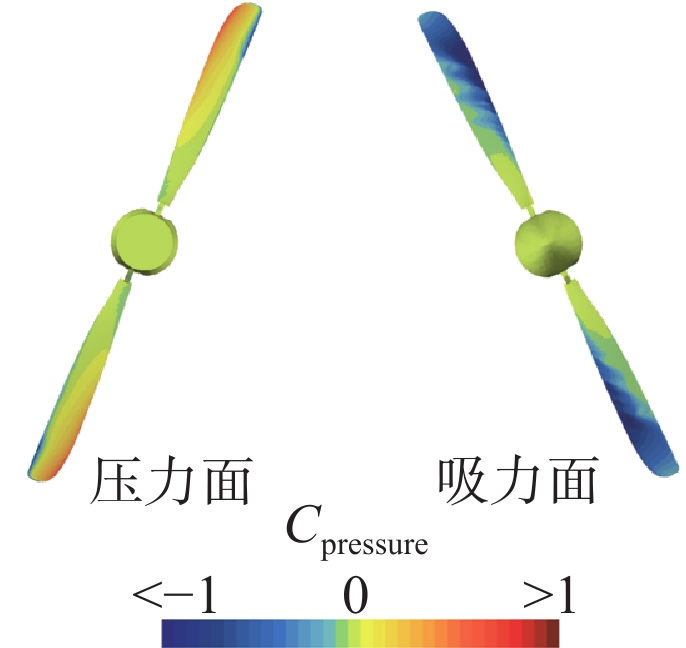
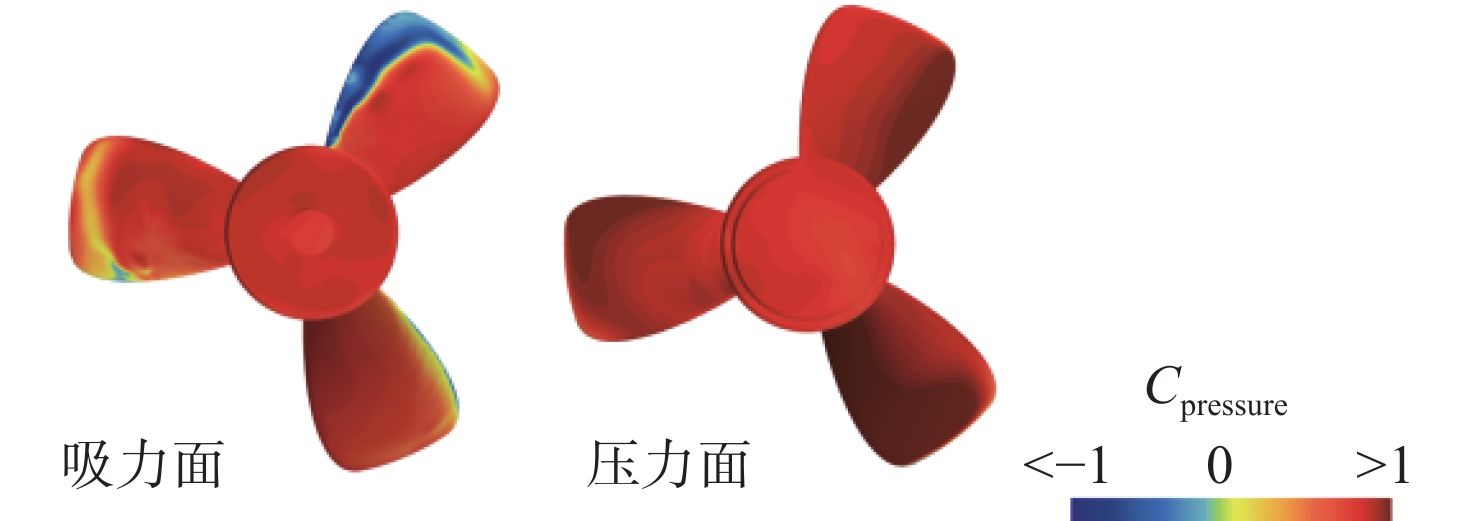
图 27 水下螺旋桨压力分布(单组)
Figure 27. Pressure distribution on the underwater propeller(single)
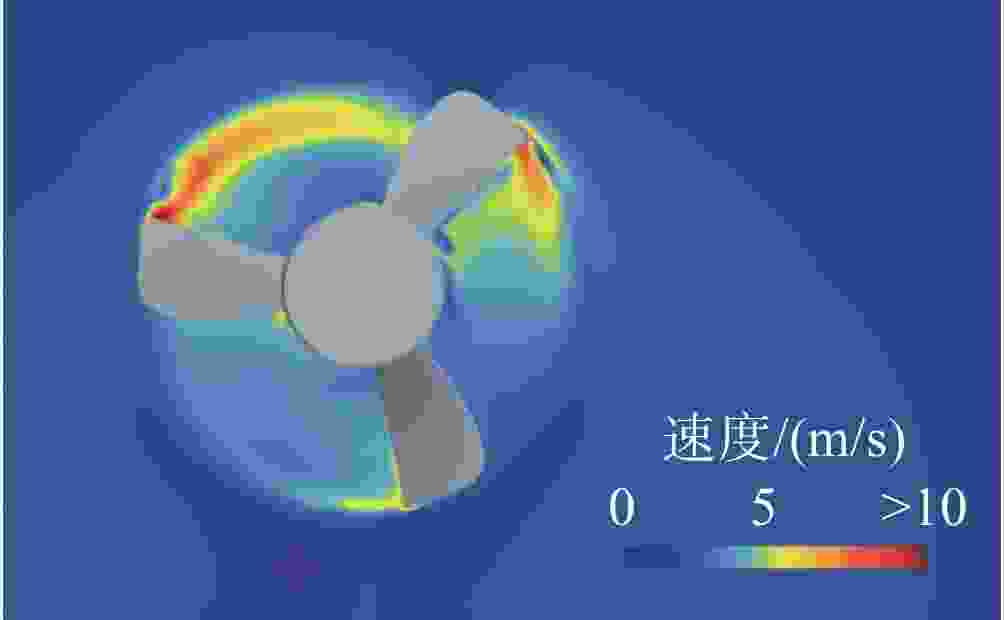
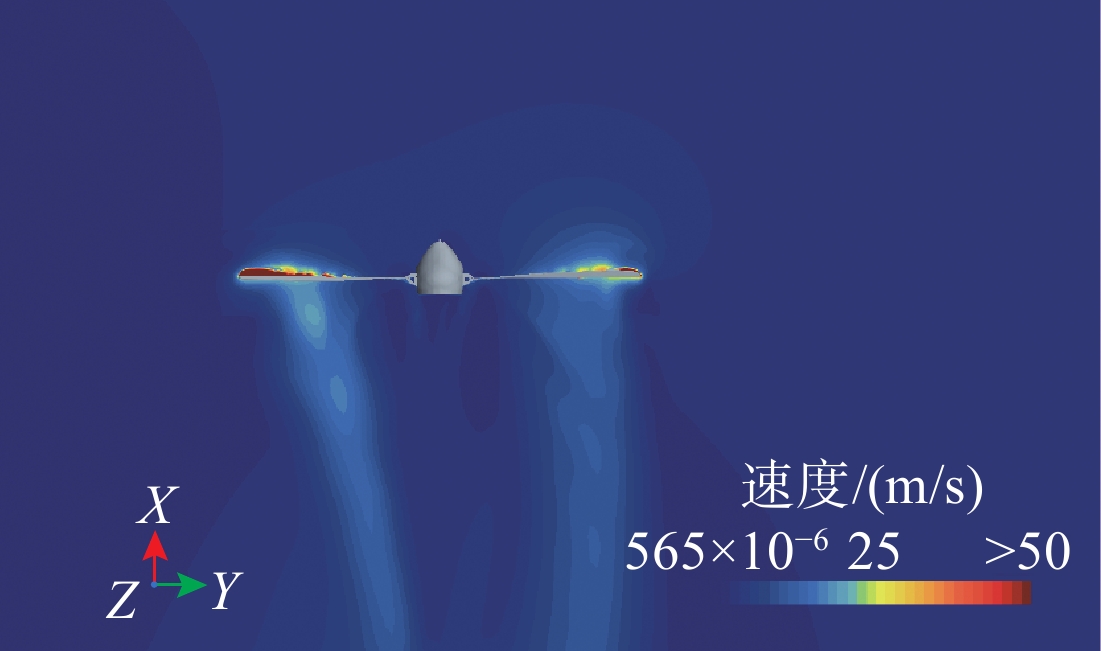
图 28 水下螺旋桨桨盘面位置速度分布(单组)
Figure 28. Velocity distribution on the position of the underwater propeller disk plane(single)
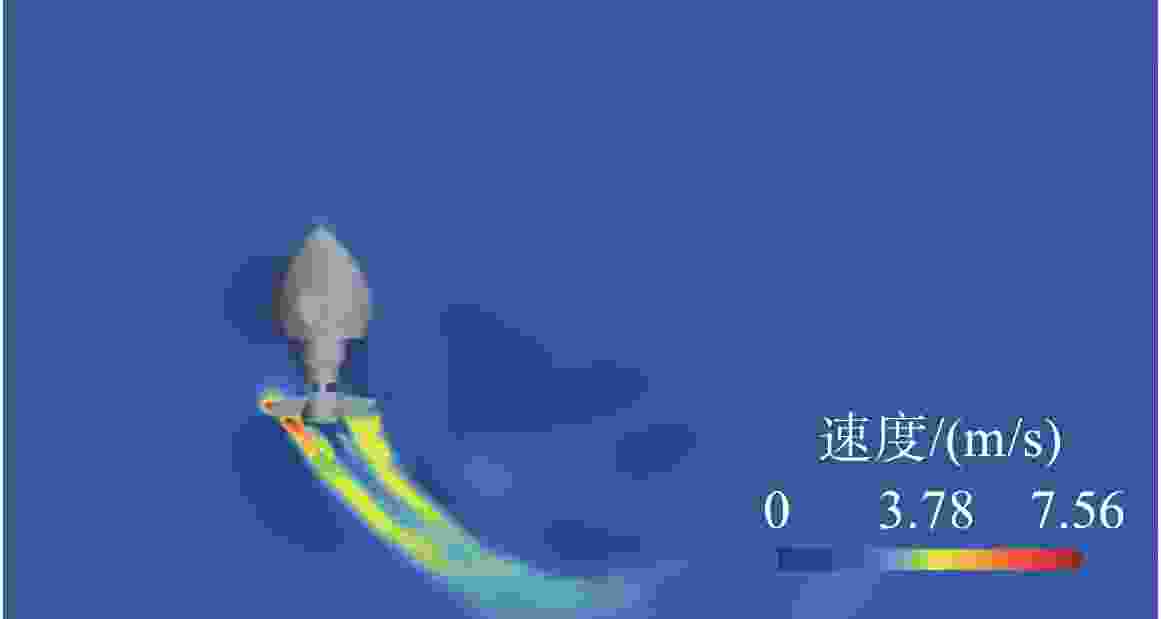
图 29 水下螺旋桨尾流速度分布(单组)
Figure 29. Wake velocity distribution of the underwater propeller(single)
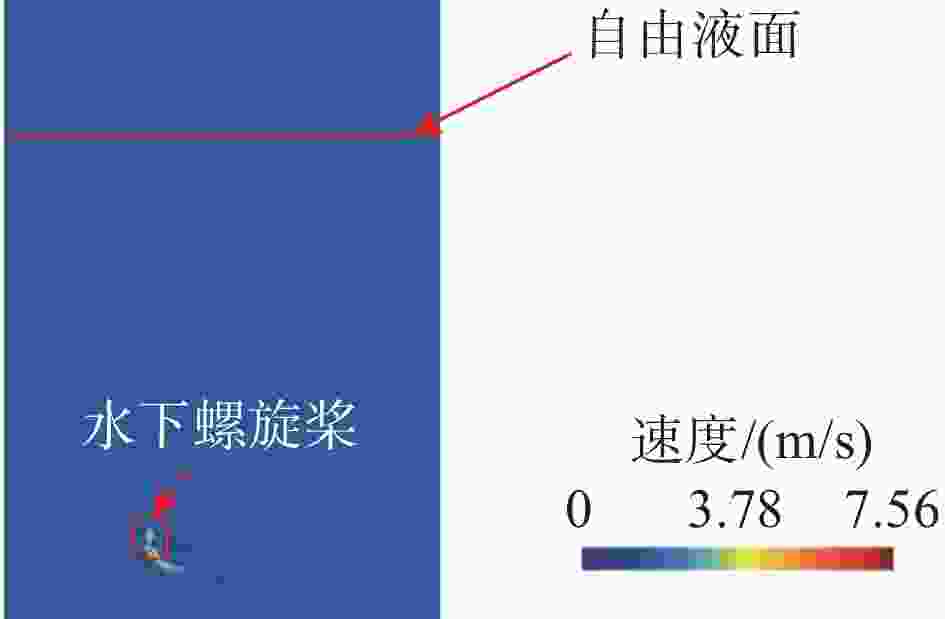
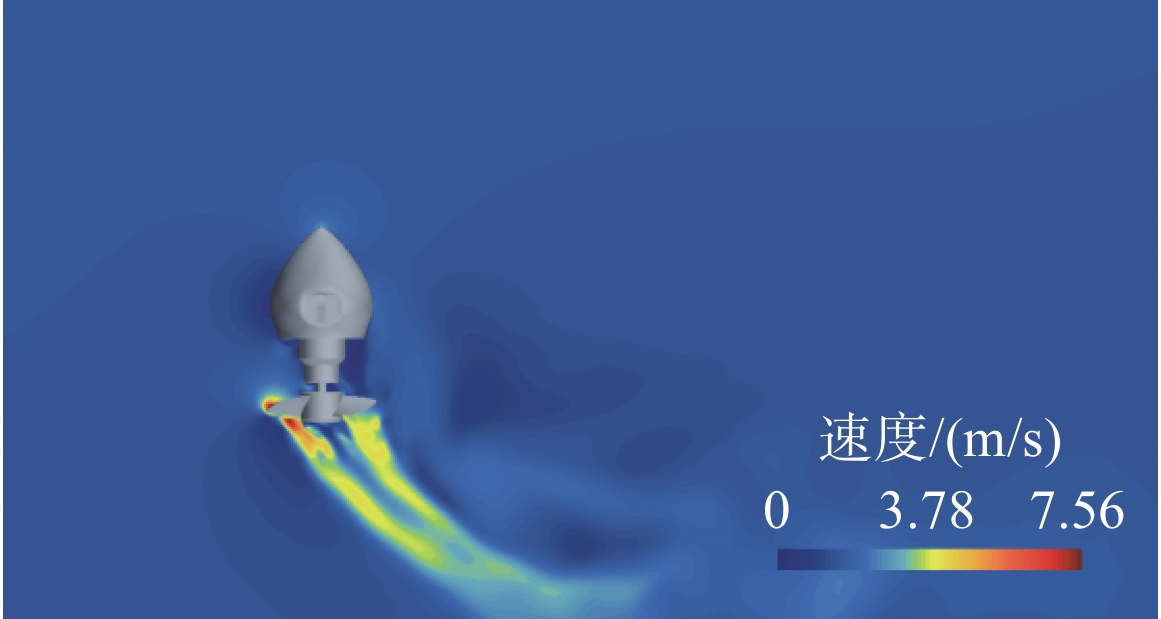
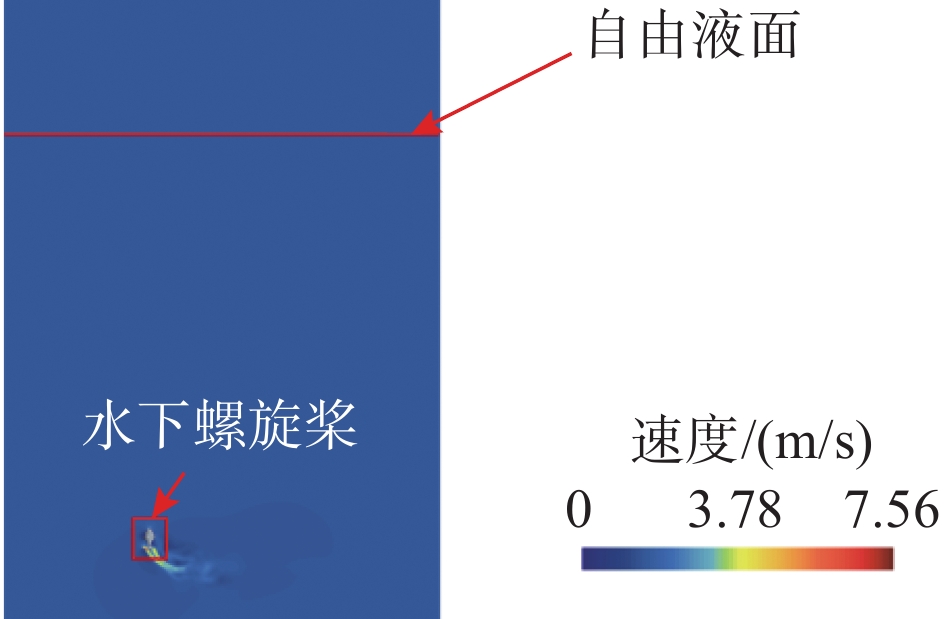
图 30 水下螺旋桨中纵剖面处速度分布(单组)
Figure 30. Velocity distribution on underwater propeller in the central longitudinal section(single)
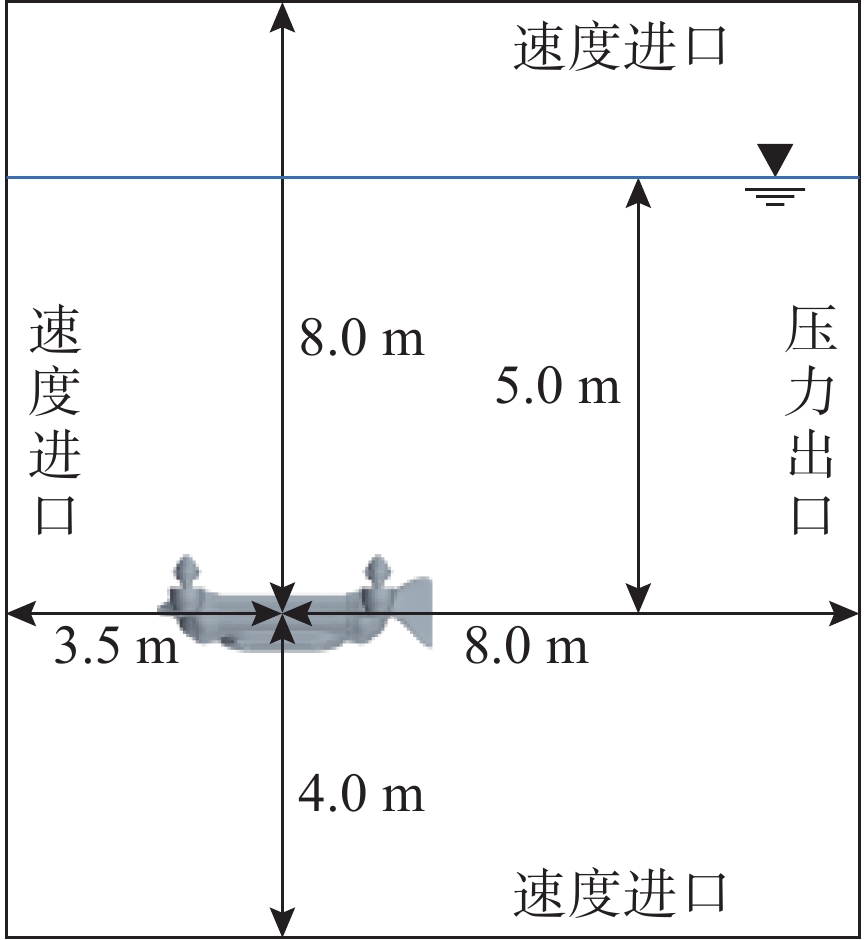
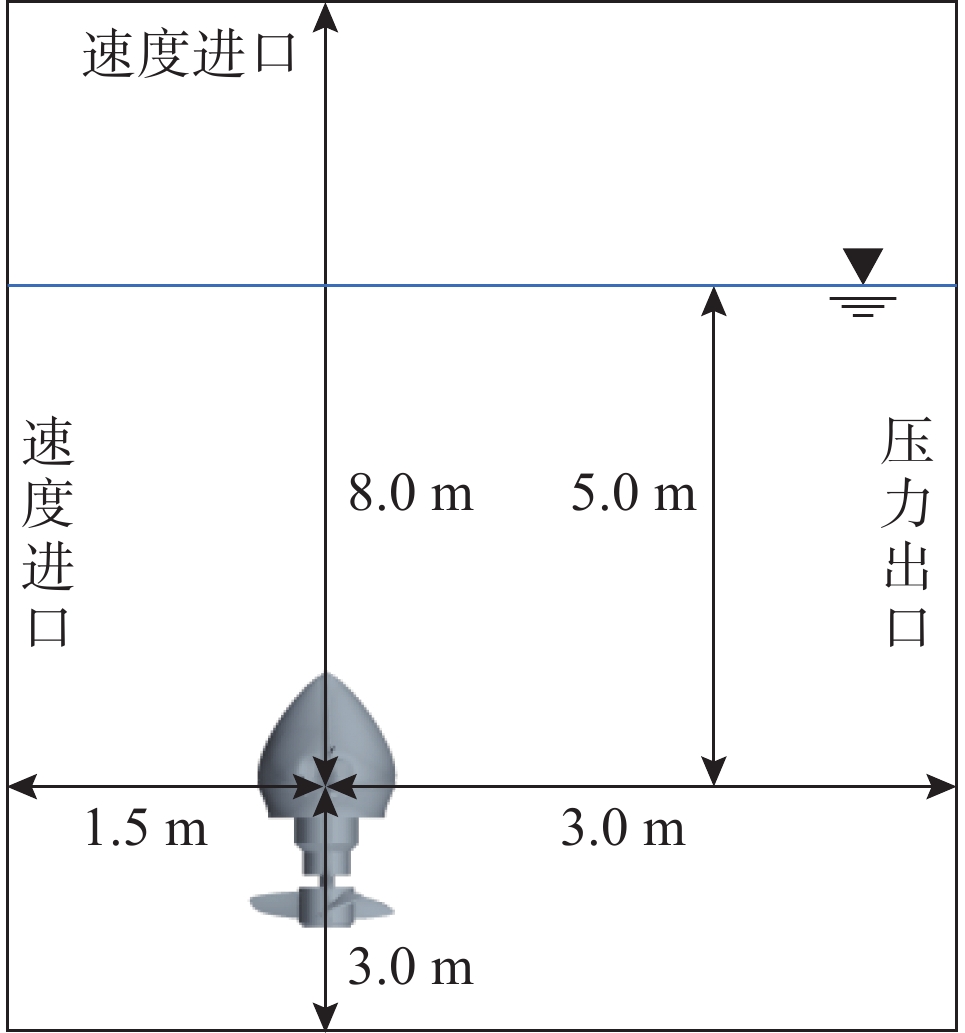
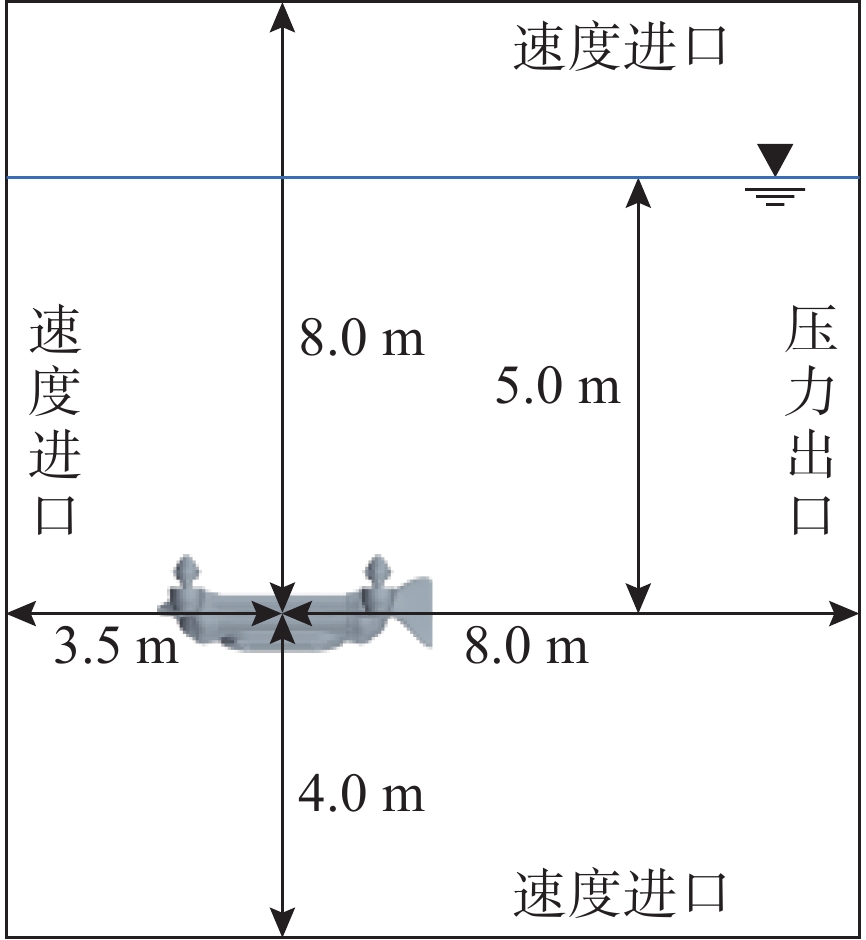
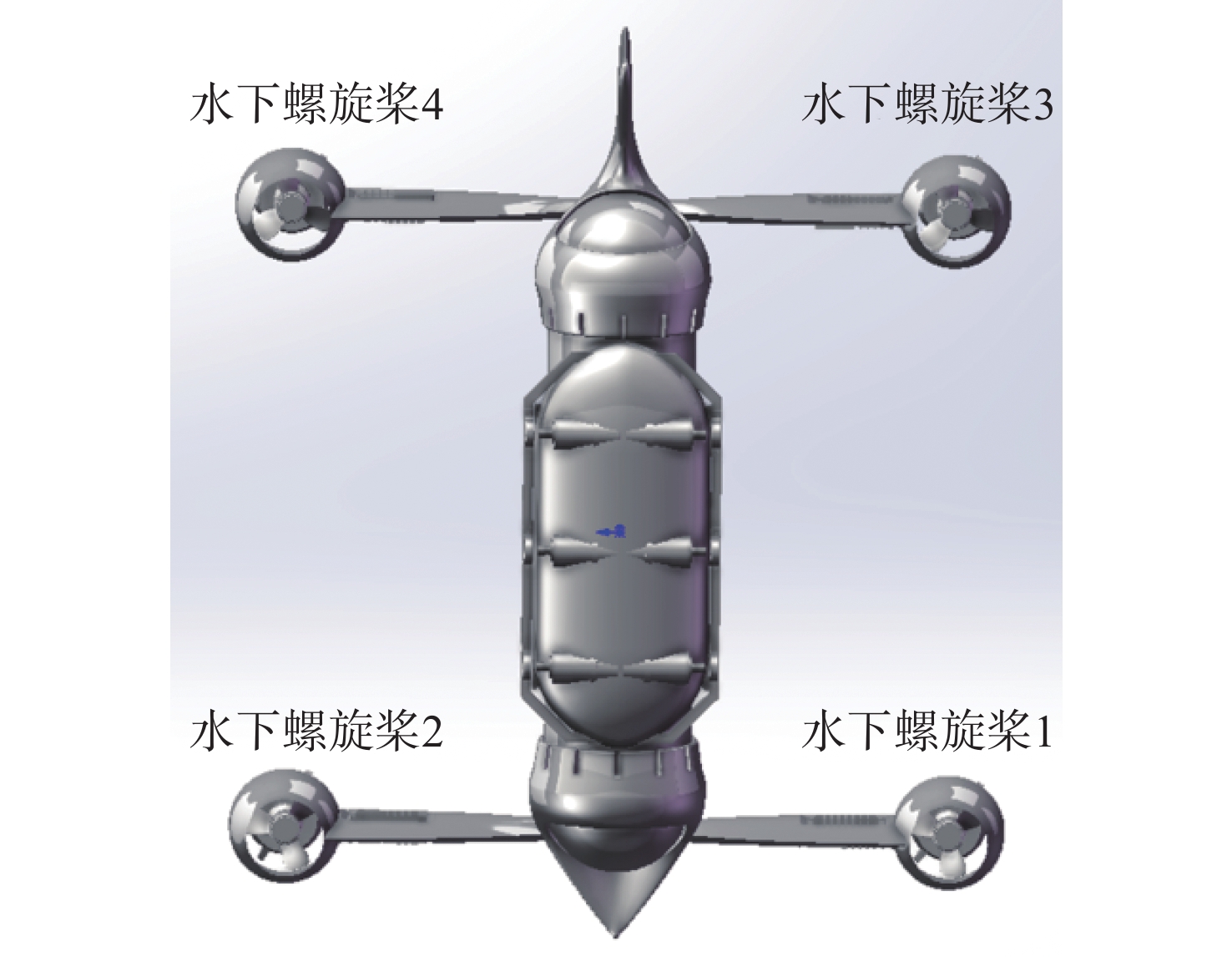
图 31 水下螺旋桨计算域尺寸和边界条件(多组)
Figure 31. Dimensions of the computational domain and boundary conditions for underwater propellers (multiple)
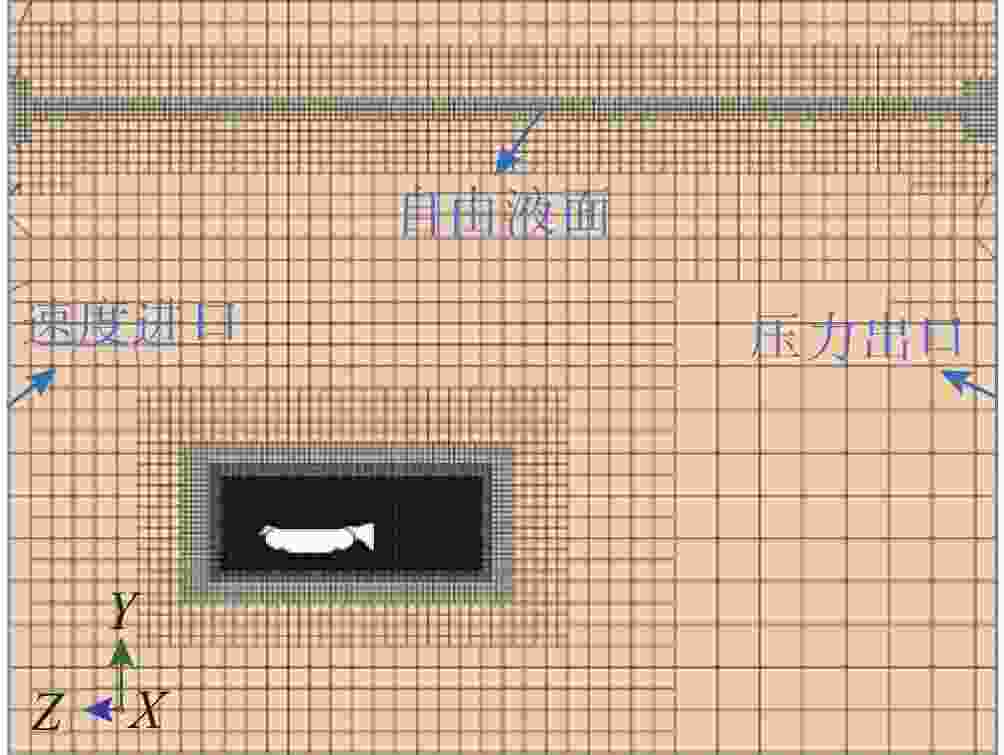
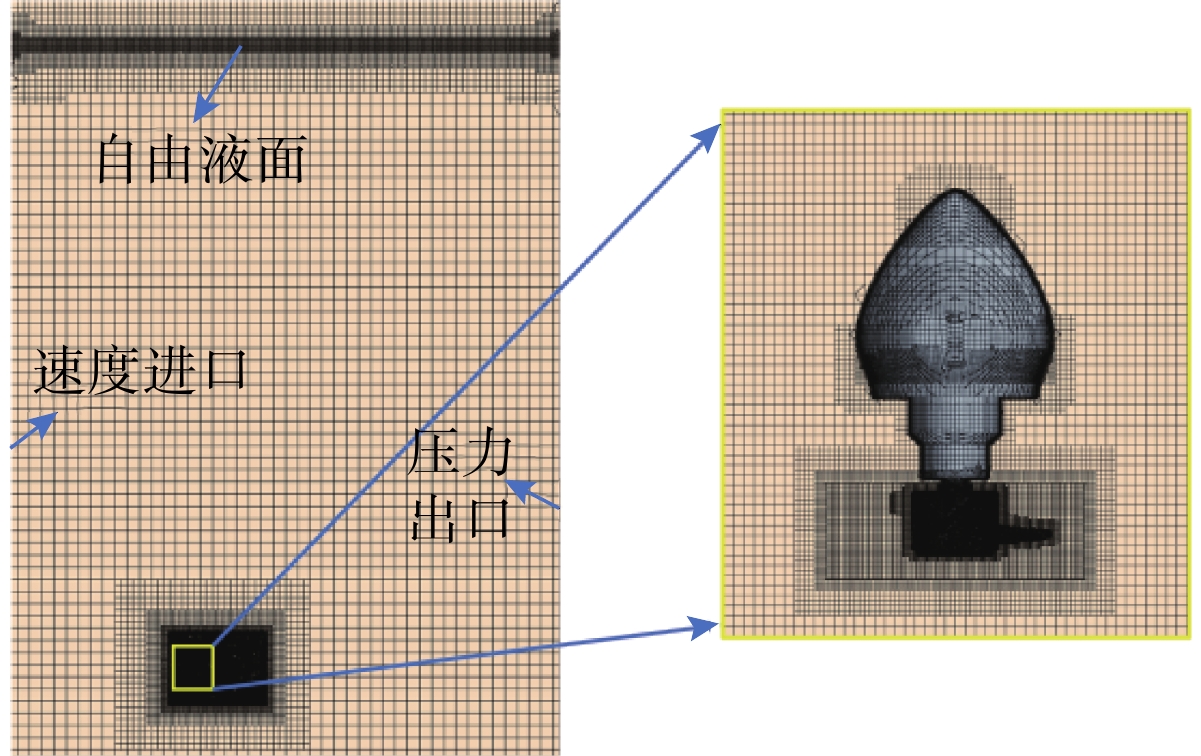
图 32 水下螺旋桨中纵剖面网格划分(多组)
Figure 32. Mesh generation of underwater propellers in the central longitudinal section(multiple)
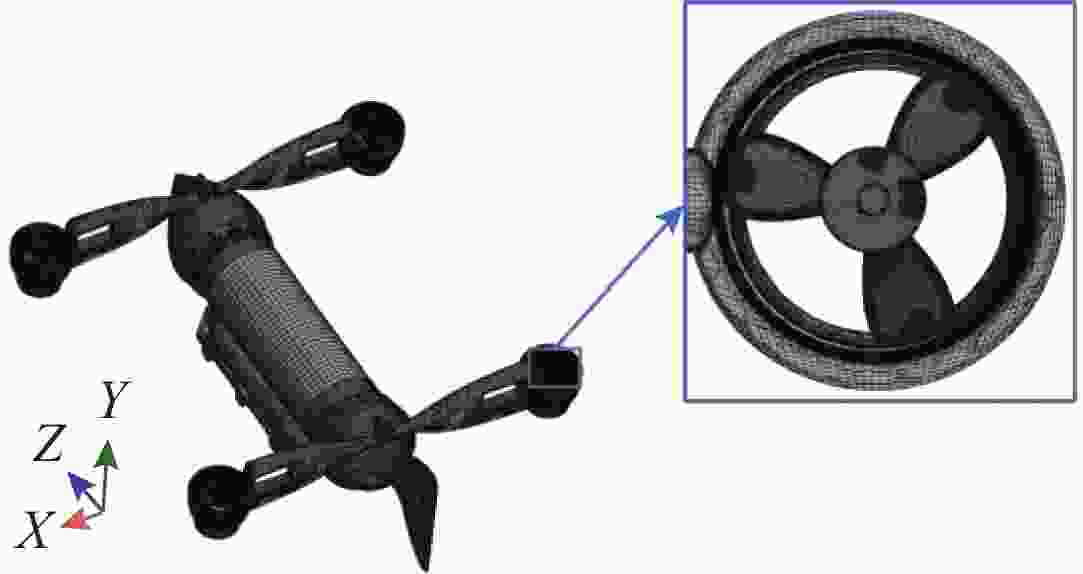
图 33 水下螺旋桨表面网格划分(多组)
Figure 33. Mesh generation on the surface of the underwater propeller(multiple)
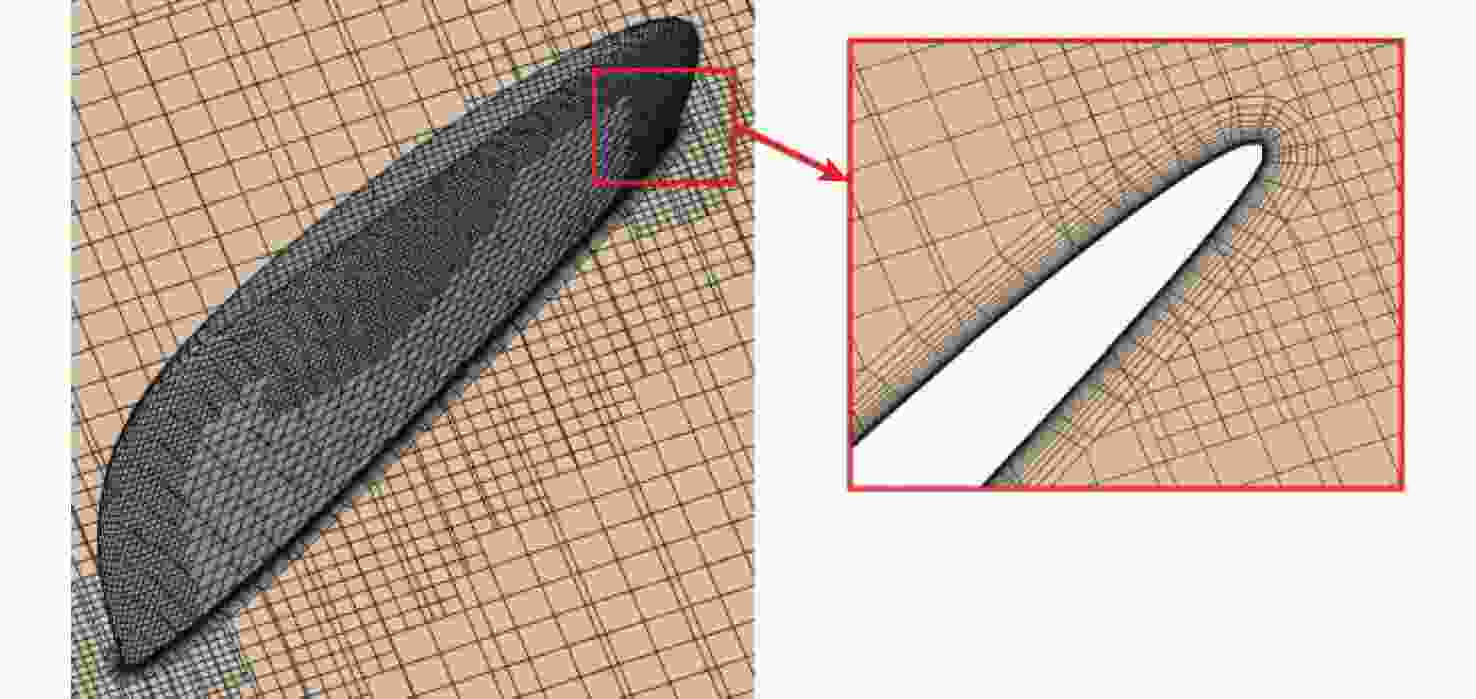
图 34 水下螺旋桨边界层划分(多组)
Figure 34. Boundary layer division of the underwater propeller(multiple)
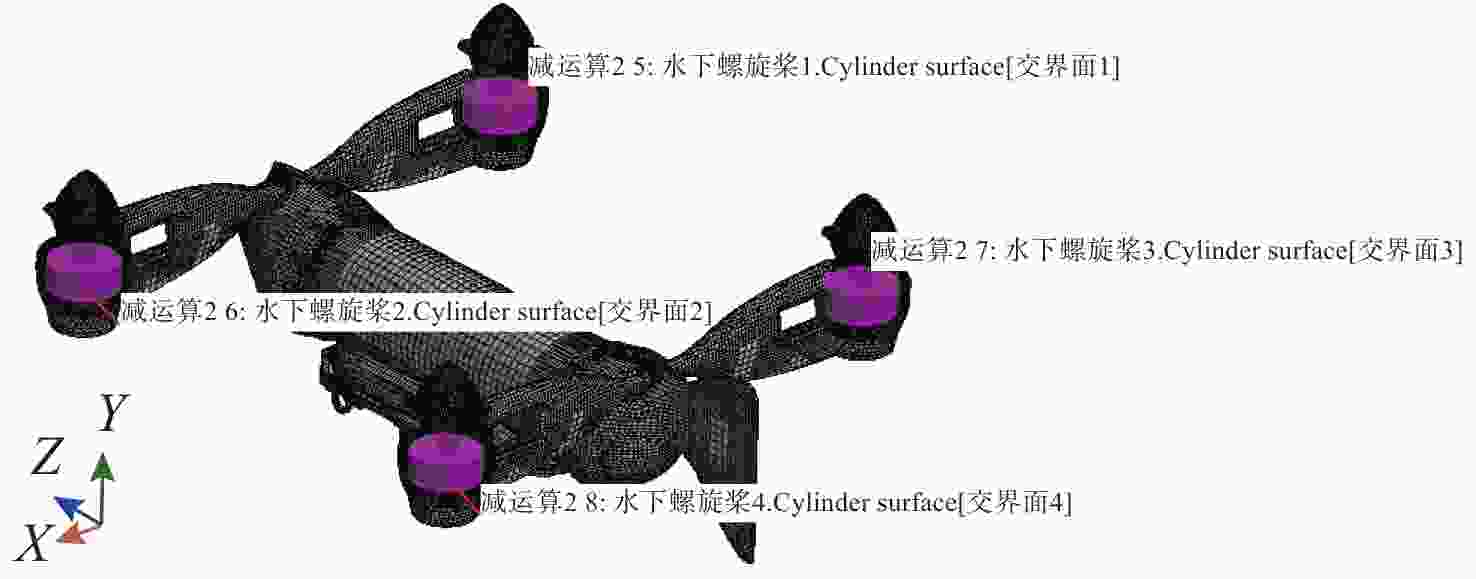
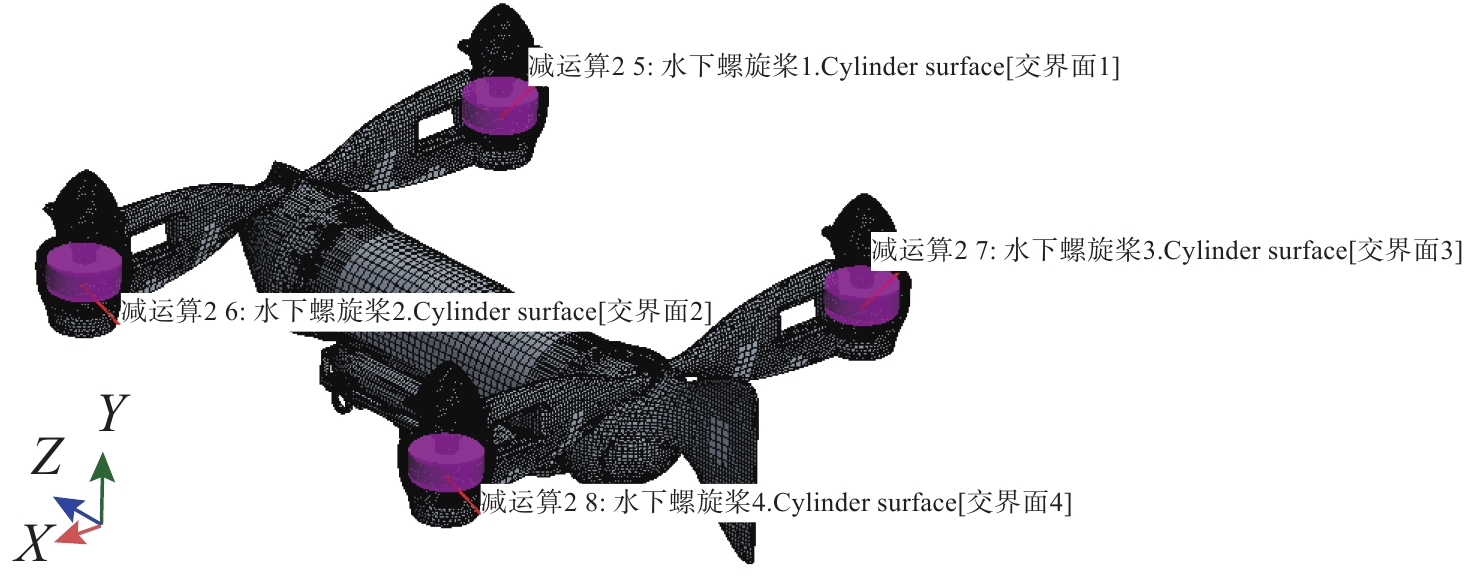
图 35 水下螺旋桨滑移网格区域(多组)
Figure 35. Sliding mesh region of underwater propellers (multiple)
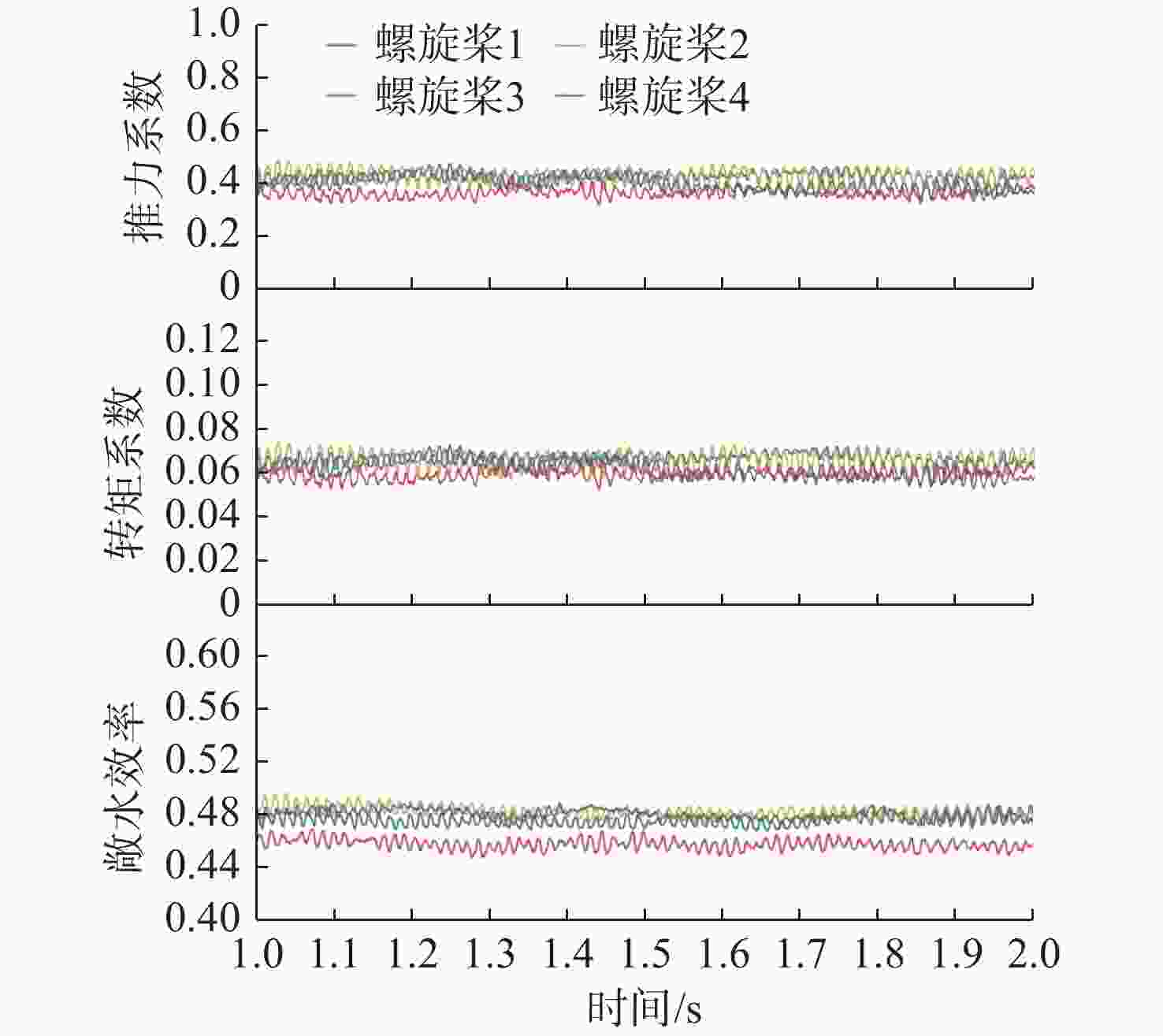
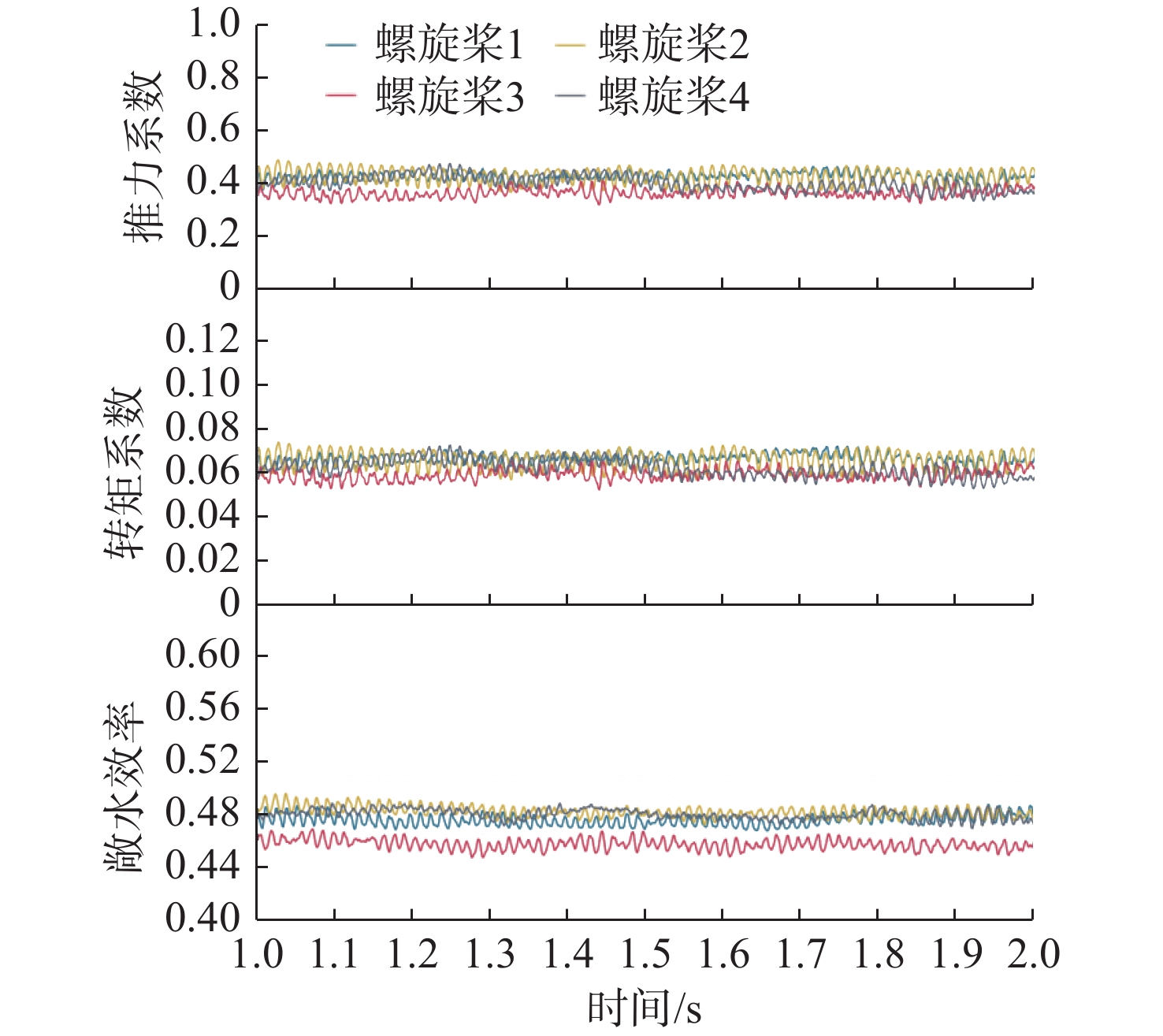
图 37 水下螺旋桨水动力性能时历曲线(多组)
Figure 37. Time history curves of hydrodynamic performance of underwater propellers(multiple)
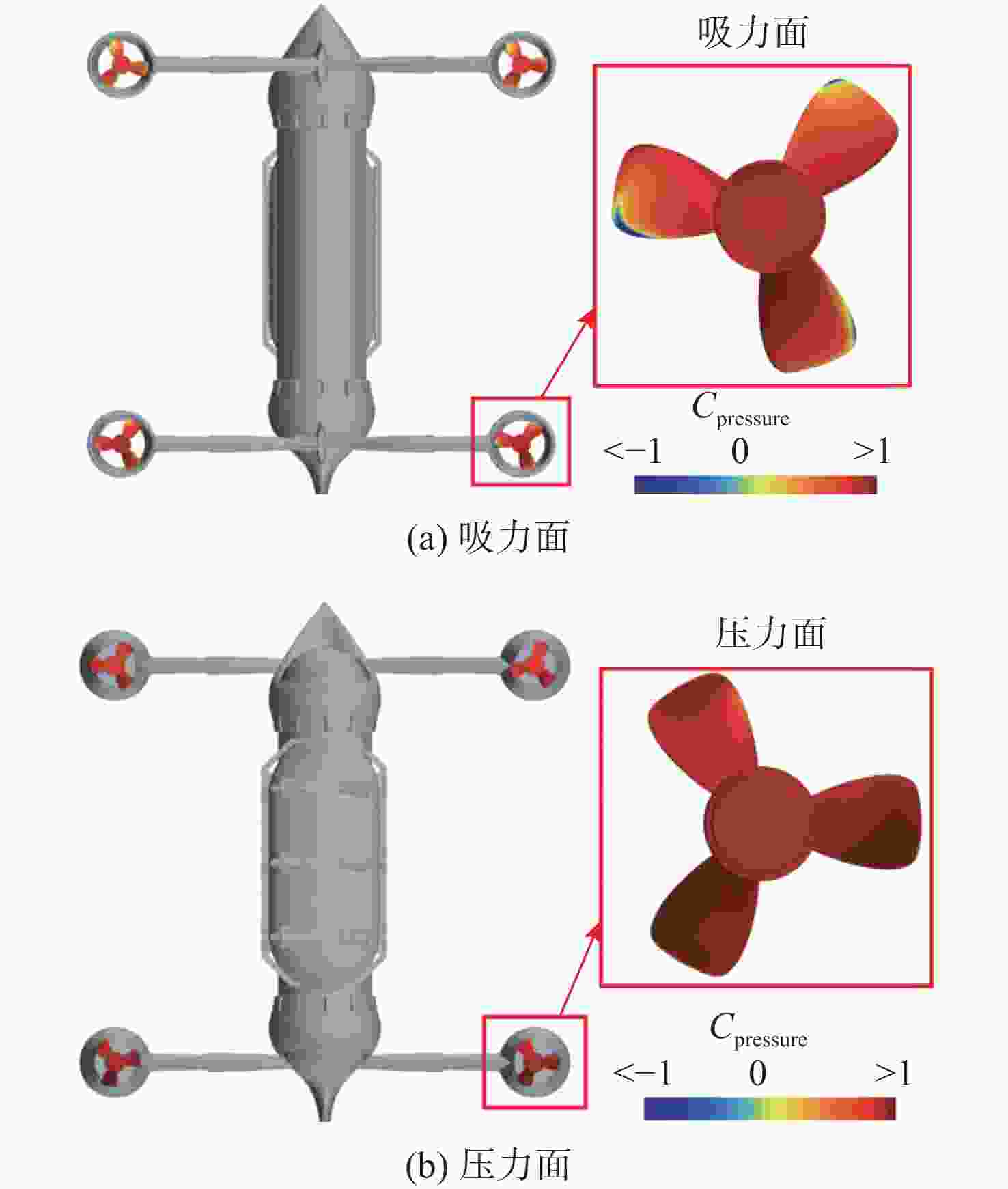
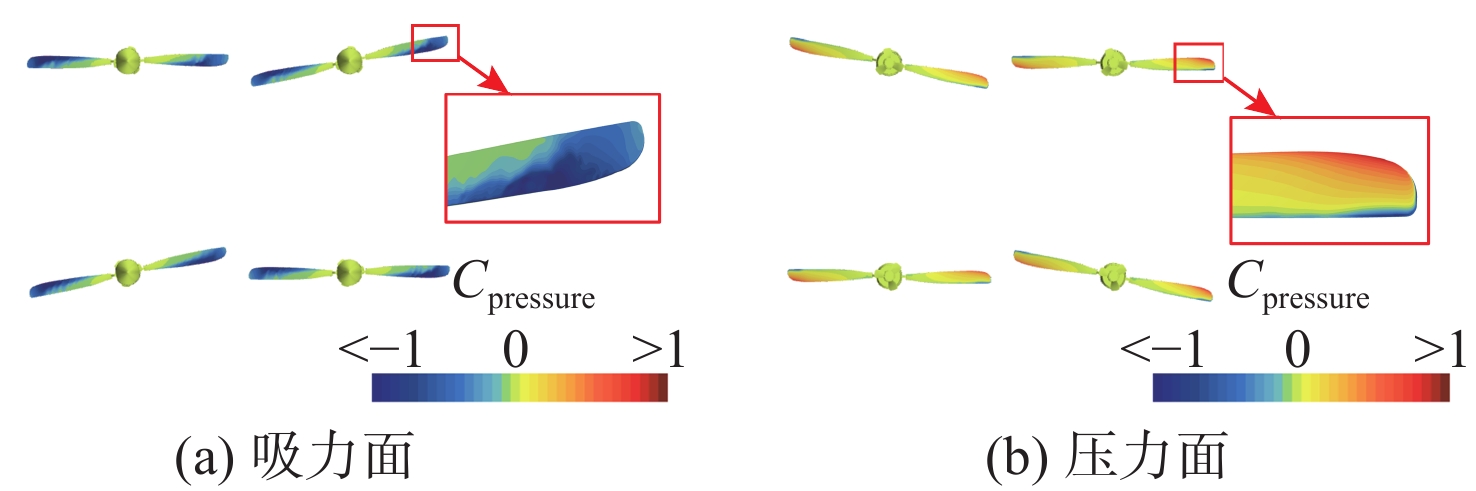
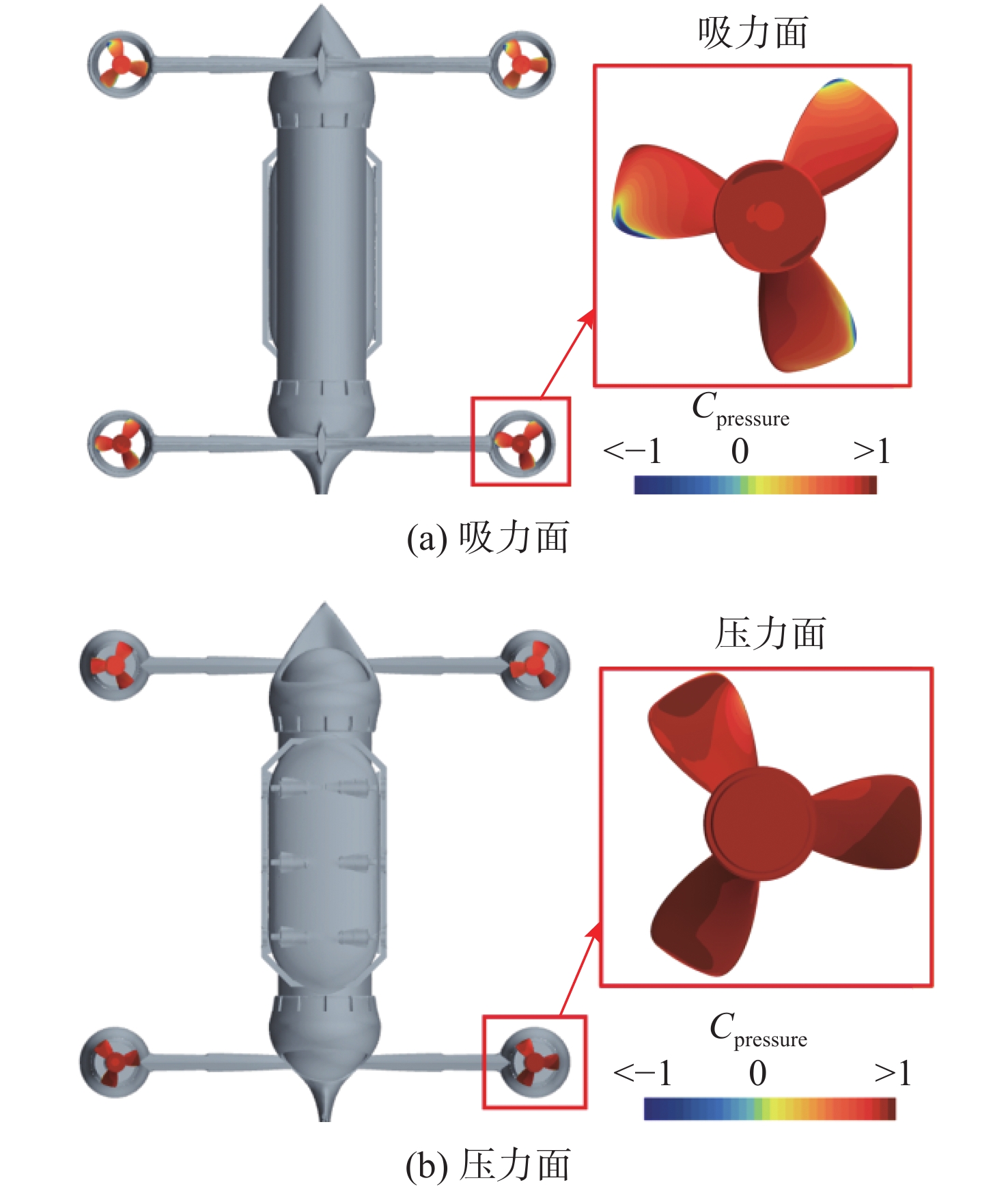
图 38 水下螺旋桨压力分布(多组)
Figure 38. Pressure distribution on the underwater propeller(multiple)
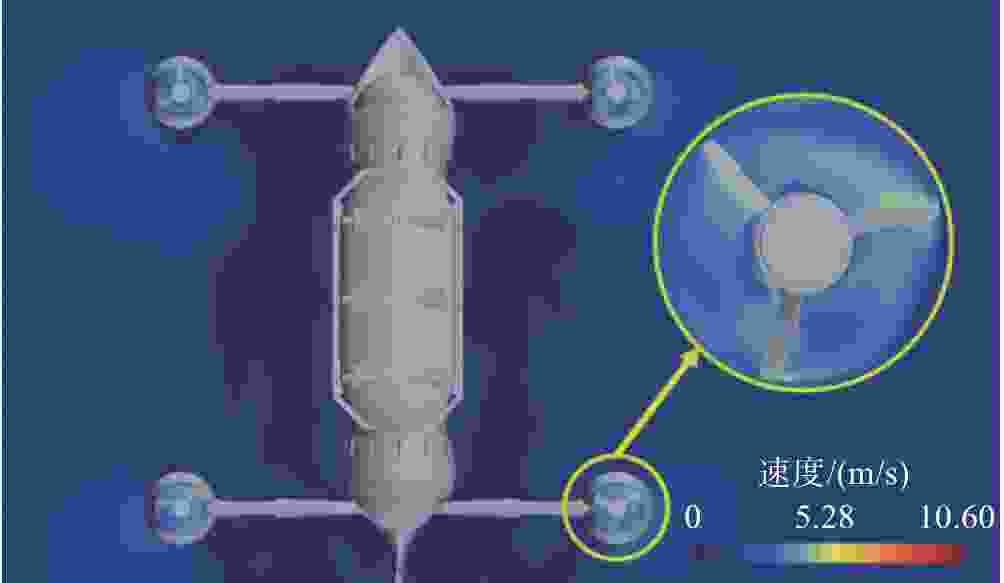
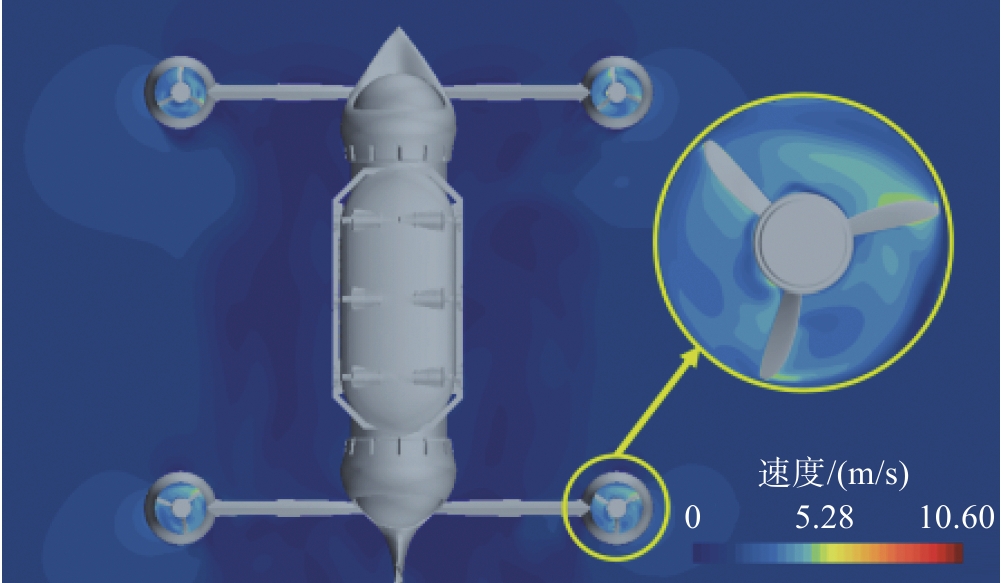
图 39 水下螺旋桨桨盘面位置速度分布(多组)
Figure 39. Velocity distribution of the underwater propeller disk plane(multiple)
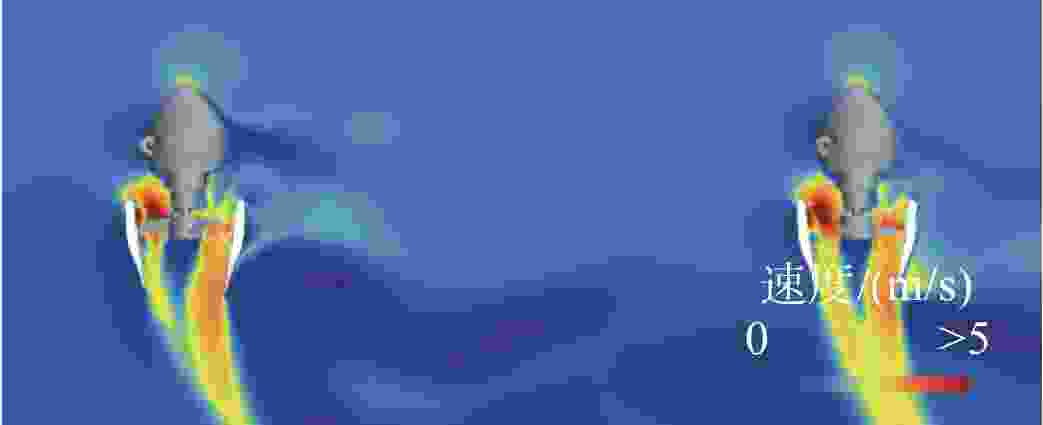
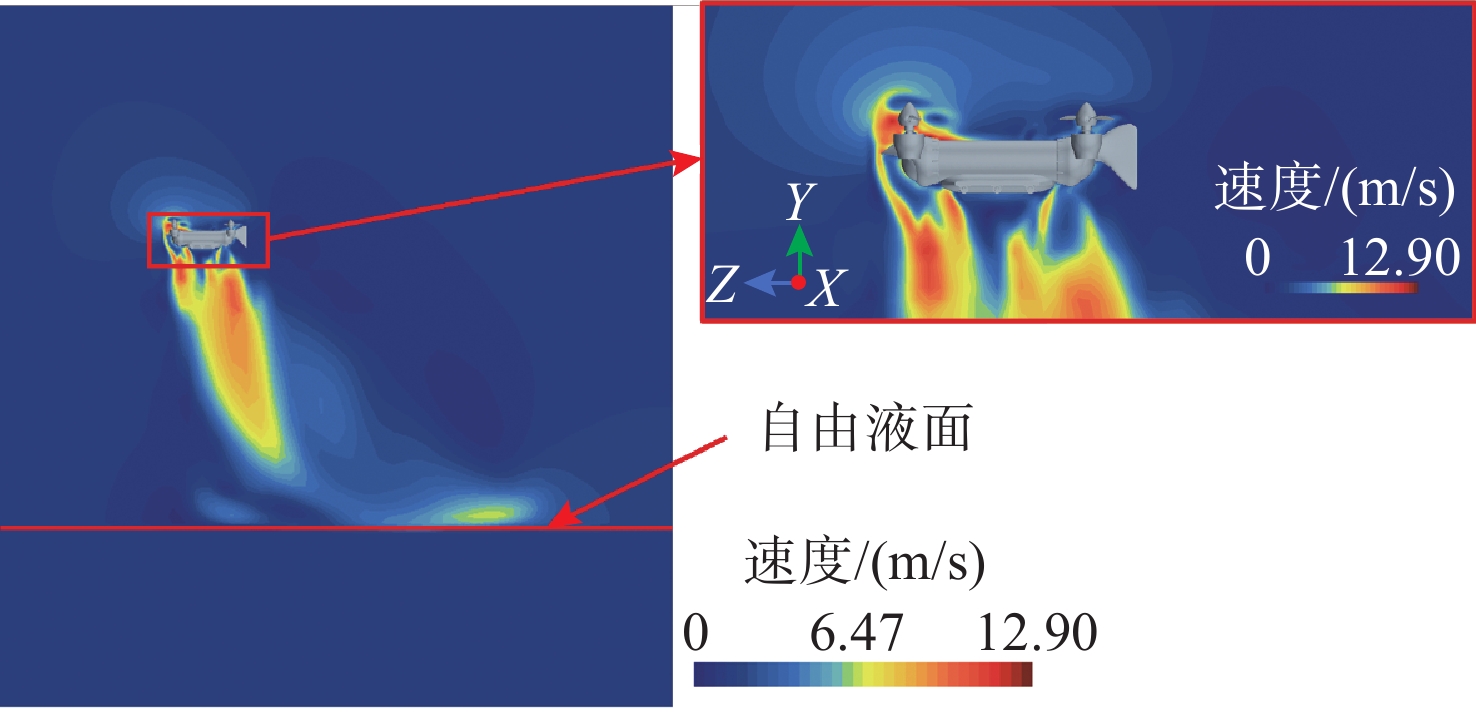
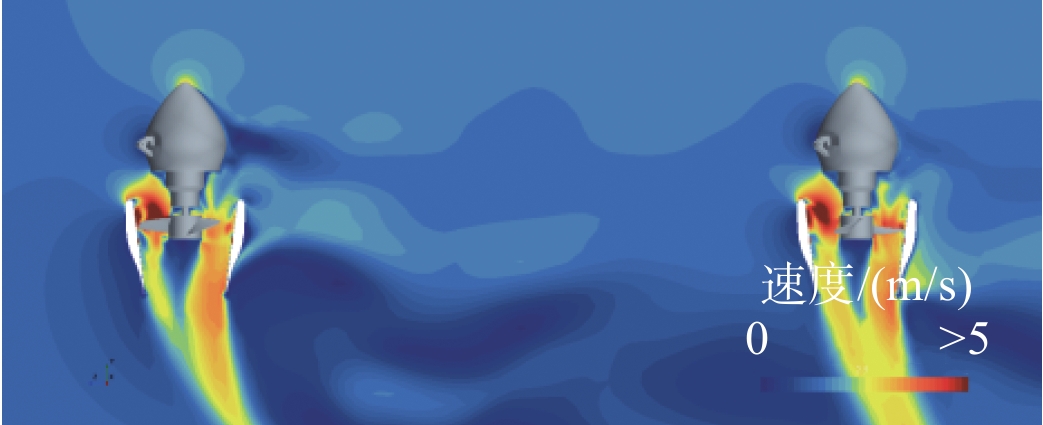
图 40 水下螺旋桨尾流速度分布(多组)
Figure 40. Wake velocity distribution of underwater propellers(multiple)
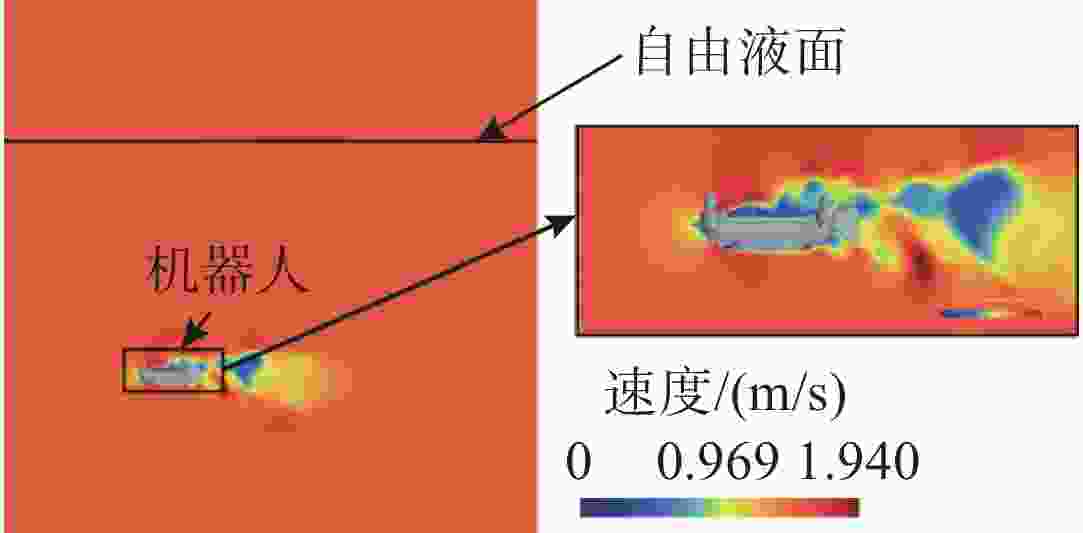
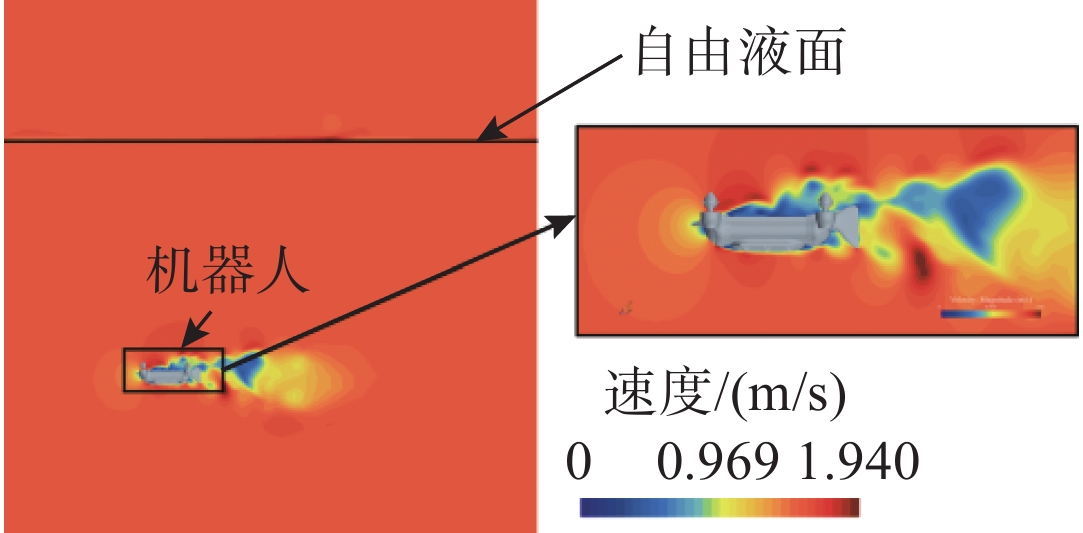
图 41 水下螺旋桨中纵剖面处速度分布(多组)
Figure 41. Velocity distribution of underwater propellers in the central longitudinal section(multiple)
表 1 空中螺旋桨3套网格的尺寸和数量(单组)
Table 1. Sizes and numbers of three mesh sets of the aerial propeller(single)
网格编号 网格质量 最小网格尺寸/m 网格总数 1 精细 4.75×10−4 13 863 440 2 中等 6.25×10−4 7 143 909 3 粗糙 7.50×10−4 4 676 327  下载: 导出CSV
下载: 导出CSV
表 2 空中螺旋桨网格收敛性分析结果(单组)
Table 2. Results of grid convergence analysis for the aerial propeller(single)
物理量 $ \phi_{1} $ $ \phi_{2} $ $ \phi_{3} $ $ \phi_{\mathrm{ext}}^{21} $ $ e_{a}^{21} $ $ e_{\mathrm{ext}}^{21} $ $ GCI^{21}/{\text{%}} $ 推力
系数0.078 3 0.079 8 0.081 9 0.077 9 0.016 6 0.007 5 0.94 转矩
系数0.011 4 0.011 8 0.013 0 0.011 3 0.035 1 0.005 5 0.69
下载: 导出CSV
表 3 空中螺旋桨气动性能统计结果(单组)
Table 3. Statistical results of aerodynamic performance of the aerial propeller(single)
变量 数值 航速/kn 3 驱动转速/(r/min) 1 500 推力系数 0.079 8 转矩系数 0.011 8 功率系数 0.073 8 推进效率 0.072 9
下载: 导出CSV
表 4 空中螺旋桨3套网格尺寸和数量(多组)
Table 4. Sizes and numbers of three mesh sets for aerial propellers(multiple)
网格编号 网格质量 最小网格尺寸/m 网格总数 1 精细 3.8×10−4 25 345 372 2 中等 5.0×10−4 14 519 320 3 粗糙 7.0×10−4 7 804 743
下载: 导出CSV
表 5 空中螺旋桨网格收敛性分析结果(多组)
Table 5. Results of grid convergence analysis for aerial propellers(multiple)
物理量 ${\phi}_{1} $ $ \phi_{2} $ $ \phi_{3} $ $ \phi^{21}_{\mathrm{ext }}$ $ e_{a}^{21} $ $e^{21}_{\mathrm{ext}} $ $ GC I^{21}$ 推力 173.13 N 173.87 N 175.21 N 171.85 N 0.004 3 N 0.007 4 N 0.77% 转矩 22.76 $\mathrm{N} \cdot \mathrm{~m} $ 23.15 $\mathrm{N} \cdot \mathrm{~m} $ 23.24 $\mathrm{N} \cdot \mathrm{~m} $ 23.67 $\mathrm{N} \cdot \mathrm{~m} $ 0.017 1 $\mathrm{N} \cdot \mathrm{~m} $ 0.003 8 $\mathrm{N} \cdot \mathrm{~m} $ 0.38%
下载: 导出CSV
表 6 空中螺旋桨气动性能统计结果(多组)
Table 6. Statistical results of aerodynamic performance of aerial propellers(multiple)
螺旋桨编号 推力系数 转矩系数 功率系数 推进效率 1 0.081 6 0.011 8 0.074 0 0.074 3 2 0.086 9 0.012 6 0.079 0 0.074 2 3 0.082 0 0.012 0 0.075 5 0.073 2 4 0.083 2 0.012 1 0.075 7 0.074 0
下载: 导出CSV
表 7 跨介质机器人空中航行升阻力
Table 7. Lift and drag forces during the aerial navigation of the cross-medium robot
变量 数值 航速/kn 3 转速/(r/min) 1 500 升力/N 173.87 阻力/N 5.98
下载: 导出CSV
表 8 水下螺旋桨3套网格尺寸和数量(单组)
Table 8. Sizes and numbers of three mesh sets of the underwater propeller(single)
网格编号 网格质量 最小网格尺寸/m 网格总数 1 精细 1.31×10−4 10 984 385 2 中等 1.75×10−4 6 028 379 3 粗糙 2.45×10−4 3 101 420
下载: 导出CSV
表 9 水下螺旋桨网格收敛性分析结果(单组)
Table 9. Results of grid convergence analysis for the underwater propeller(single)
物理量 $ {\phi}_{1} $ $ \phi_{2} $ $ \phi_{3} $ $ \phi^{21} $ $ e_{a}^{21} $ $ {e_{{\mathrm{ext}}}}^{21} $ $ G C I^{21}/{\text{%}} $ 推力
系数0.443 2 0.440 6 0.432 1 0.444 7 0.005 9 0.003 3 0.41 转矩
系数0.073 8 0.073 1 0.071 6 0.074 6 0.009 5 0.010 9 1.37
下载: 导出CSV
表 10 水下螺旋桨水动力性能统计结果(单组)
Table 10. Statistical results of hydrodynamic performance of underwater propeller(single)
变量 数值 航速/kn 3 驱动转速/(r/min) 1 500 推力系数 0.440 6 转矩系数 0.073 1 敞水效率 0.441 7
下载: 导出CSV
表 11 水下螺旋桨3套网格的尺寸和数量(多组)
Table 11. Sizes and numbers of three mesh sets of underwater propellers(multiple)
网格编号 网格质量 最小网格尺寸/m 网格总数 1 精细 2.250×10−4 18 041 700 2 中等 3.125×10−4 9 121 663 3 粗糙 4.125×10−4 5 522 231
下载: 导出CSV
表 12 水下螺旋桨网格收敛性分析结果(多组)
Table 12. Results of grid convergence analysis for underwater propellers(multiple)
物理量 $ {\phi}_{1} $ $ \phi_{2} $ $ \phi_{3} $ $ \phi_{{\mathrm{ext}}}^{21} $ $ e_{a}^{21} $ $ e_{{\mathrm{ext}}}^{21} $ $ G C I^{21} $ 推力 327.73 N 326.82 N 324.97 N 328.12 N 0.0012 N0.0028 N0.15% 转矩 6.85 $\mathrm{N} \cdot \mathrm{~m} $ 6.77 $\mathrm{N} \cdot \mathrm{~m} $ 6.61 $\mathrm{N} \cdot \mathrm{~m} $ 6.89 $\mathrm{N} \cdot \mathrm{~m} $ 0.0117 $\mathrm{N} \cdot \mathrm{~m} $0.0051 $\mathrm{N} \cdot \mathrm{~m} $0.65%
下载: 导出CSV
表 13 水下螺旋桨水动力性能统计结果(多组)
Table 13. Statistical results of hydrodynamic performance of underwater propellers(multiple)
螺旋桨编号 推力系数 转矩系数 敞水效率 1 0.427 2 0.065 9 0.476 8 2 0.438 6 0.066 3 0.484 8 3 0.372 6 0.059 6 0.458 6 4 0.387 4 0.059 6 0.476 5
下载: 导出CSV
表 14 跨介质机器人水下航行时升阻力
Table 14. Lift and drag forces during the underwater navigation of the cross-medium robot
变量 数值 航速/kn 3 转速/(r/min) 1 500 升力/N 326.82 阻力/N 636.24
下载: 导出CSV
-
[1] 兰二斌, 杨登杰, 覃继灿, 等. 陆空两栖机器人的结构设计与运动控制研究[J]. 工业控制计算机, 2019, 32(6): 58-60.LAN E B, YANG D J, QIN J C, et al. Structural design and motion control of land-air amphibious robot[J]. Industrial Control Computer, 2019, 32(6): 58-60. [2] IZRAELEVITZ J S, TRIANTAFYLLOU M S. A novel degree of freedom in flapping wings shows promise for a dual aerial/aquatic vehicle propulsor[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE, 2015: 5830-5837. [3] 刘福伟. 一种水空两栖无人艇的概念设计及其航行稳定性分析[D]. 镇江: 江苏科技大学, 2014. [4] MAIA M M, MERCADO D A, DIEZ F J. Design and implementation of multirotor aerial-underwater vehicles with experimental results[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Vancouver, British Columbia(CA): IEEE, 2017: 961-966. [5] MAIA M M, MERCADO D A, DIEZ F J. Demonstration of an aerial and submersible vehicle capable of flight and underwater navigation with seamless air-water transition[C]//XPONENTIAL 2016: An AUVSI Experience. New Orleans, USA: Curran Associates, 2016: 700-706. [6] CARUCCIO D, RUSH M, SMITH P, et al. Design, fabrication, and testing of the fixed-wing air and underwater drone[C]//17th AIAA Aviation Technology, Integration, and Operations Conference. Denver, Colorado, USA: AIAA, 2017: 4447. [7] SALUMÄE T, CHEMORI A, KRUUSMAA M. Motion control of a hovering biomimetic four-fin underwater robot[J]. IEEE Journal of Oceanic Engineering, 2017, 44(1): 54-71. doi: 10.1109/joe.2017.2774318 [8] WANG T M, YANG X B, LIANG J H, et al. CFD based investigation on the impact acceleration when a gannet impacts with water during plunge diving[J]. Bioinspiration & Biomimetics, 2013, 8(3): 036006. doi: 10.1088/1748-3182/8/3/036006 [9] LU D, XIONG C, ZENG Z, et al. A multimodal aerial underwater vehicle with extended endurance and capabilities[C]//2019 International Conference on Robotics and Automation(ICRA). Montreal, QC, Canada: IEEE, 2019: 4674-4680. [10] LU D, XIONG C, LYU B, et al. Multi-mode hybrid aerial underwater vehicle with extended endurance[C]//2018 OCEANS-MTS/IEEE Kobe Techno-Oceans(OTO). Kobe, Japan: IEEE, 2018: 1-7. [11] BAI Y, JIN Y, LIU C, et al. Nezha-F: Design and analysis of a foldable and self-deployable HAUV[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 2309-2316. [12] 王展智, 熊鹰, 齐万江, 等. 船后桨的布局对螺旋桨水动力性能的影响[J]. 哈尔滨工程大学学报, 2012, 33(4): 427-431. doi: 10.3969/j.issn.1006-7043.201105013WANG Z Z, XIONG Y, QI W J, et al. The effect of propeller arrangement behind the hull on propeller hydrodynamic performance[J]. Journal of Harbin Engineering University, 2012, 33(4): 427-431. doi: 10.3969/j.issn.1006-7043.201105013 [13] CHEN Q, YANG J, MAO J, et al. A path following controller for deep-sea mining vehicles considering slip control and random resistance based on improved deep deterministic policy gradient[J]. Ocean Engineering, 2023, 278: 114069. doi: 10.1016/j.oceaneng.2023.114069 [14] SUURNÄKKI P, TIIHONEN M, JOKELA T. UAV icing: Low reynolds number drone propeller performance during dynamic icing process[C]//AIAA AVIATION 2021 FORUM. Washington DC, USA: AIAA, 2021: 2672. [15] 卿黎. 高空长航时无人机总体设计与气动优化研究[D]. 成都: 电子科技大学, 2025. [16] 王晓璐, 陈昌宁, 刘英禹, 等. 无人机动力布局与桨机气动耦合效应研究综述[J]. 航空工程进展, 2025, 16(6): 1-16. doi: 10.16615/j.cnki.1674-8190.2025.06.01 [17] 何朝晖. 非均匀流中不同侧斜螺旋桨空化涡流演变及压力脉动数值分析[D]. 武汉: 武汉大学, 2022. [18] 王倩倩, 辛公正, 周伟新, 等. 环形螺旋桨几何构型与水动力性能计算及验证[J]. 船海工程, 2025, 54(4): 1-8.WANG Q Q, XIN G Z, ZHOU W X, et al. Calculation and verification of geometric configuration and hydrodynamic performance of toroidal propeller[J]. Ship & Ocean Engineering, 2025, 54(4): 1-8. [19] CELIK I B, GHIA U, ROACHE P J, et al. Procedure forestimation and reporting of uncertainty due to discre-tization in CFD applications[J]. Journal of Fluids Engineering-Transactions of the ASME, 2008, 130(7): 078001-1-078001-4. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 616
- HTML全文浏览量: 215
- PDF下载量: 182
- 被引次数: 0