摘要:
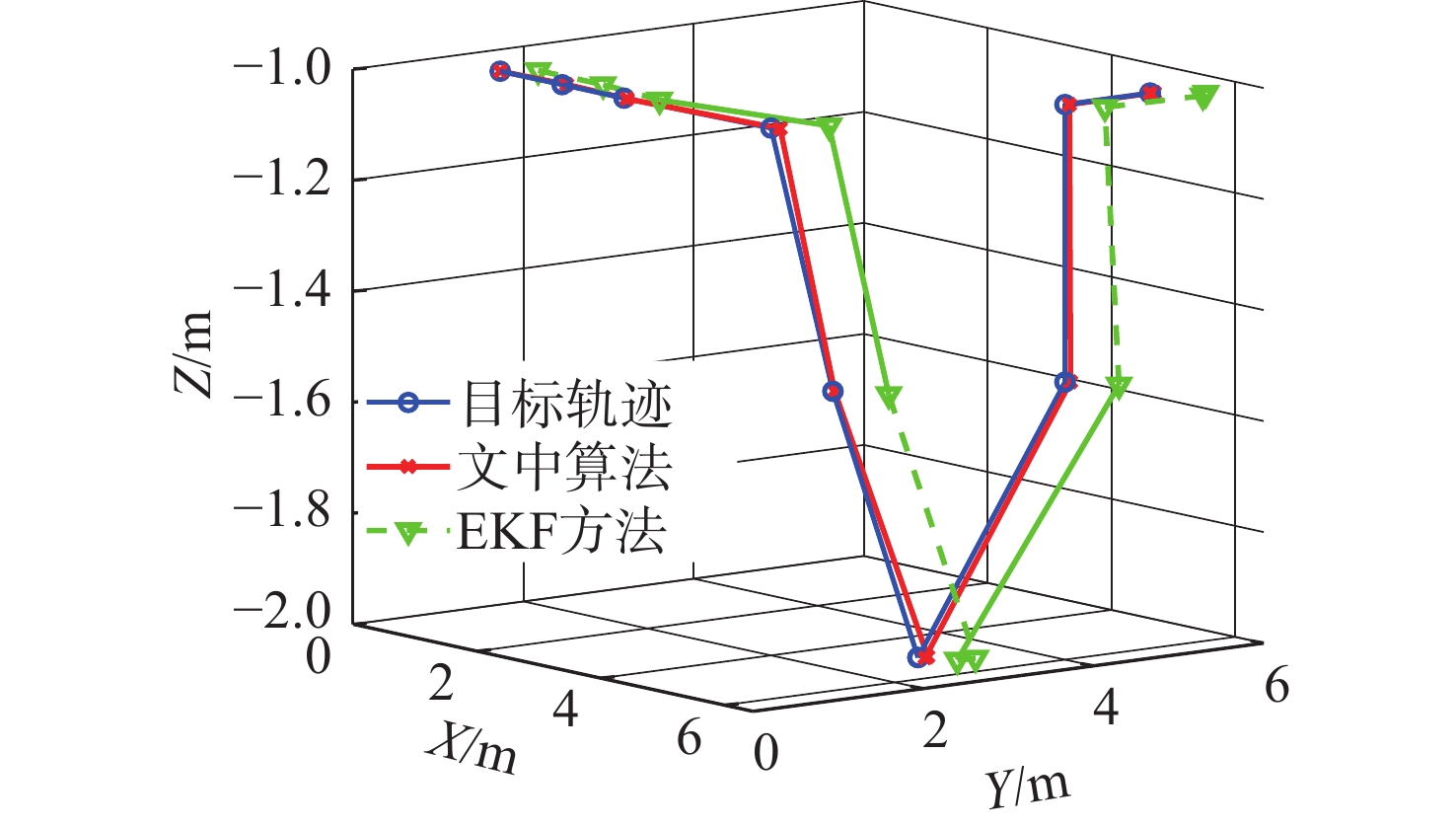
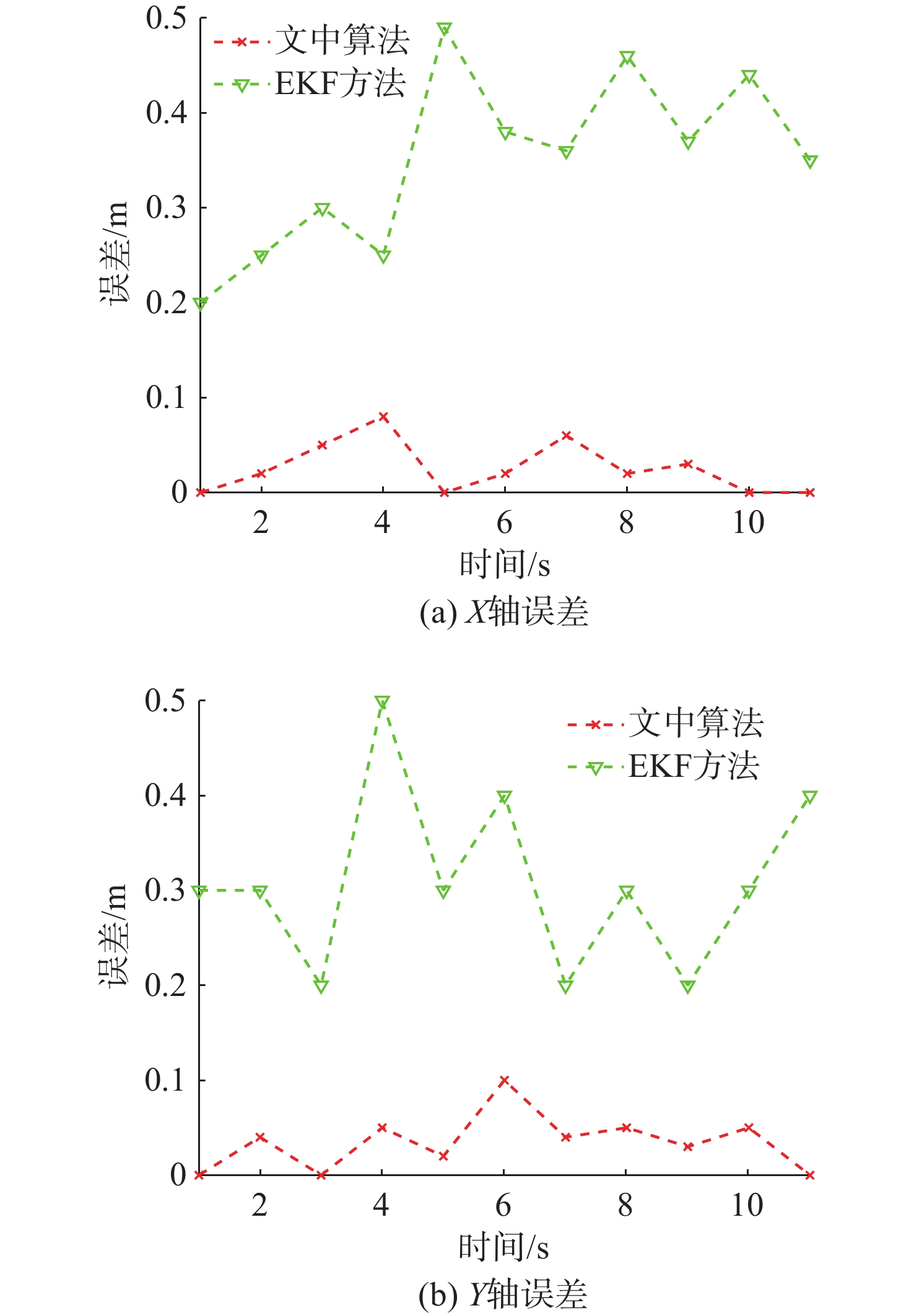
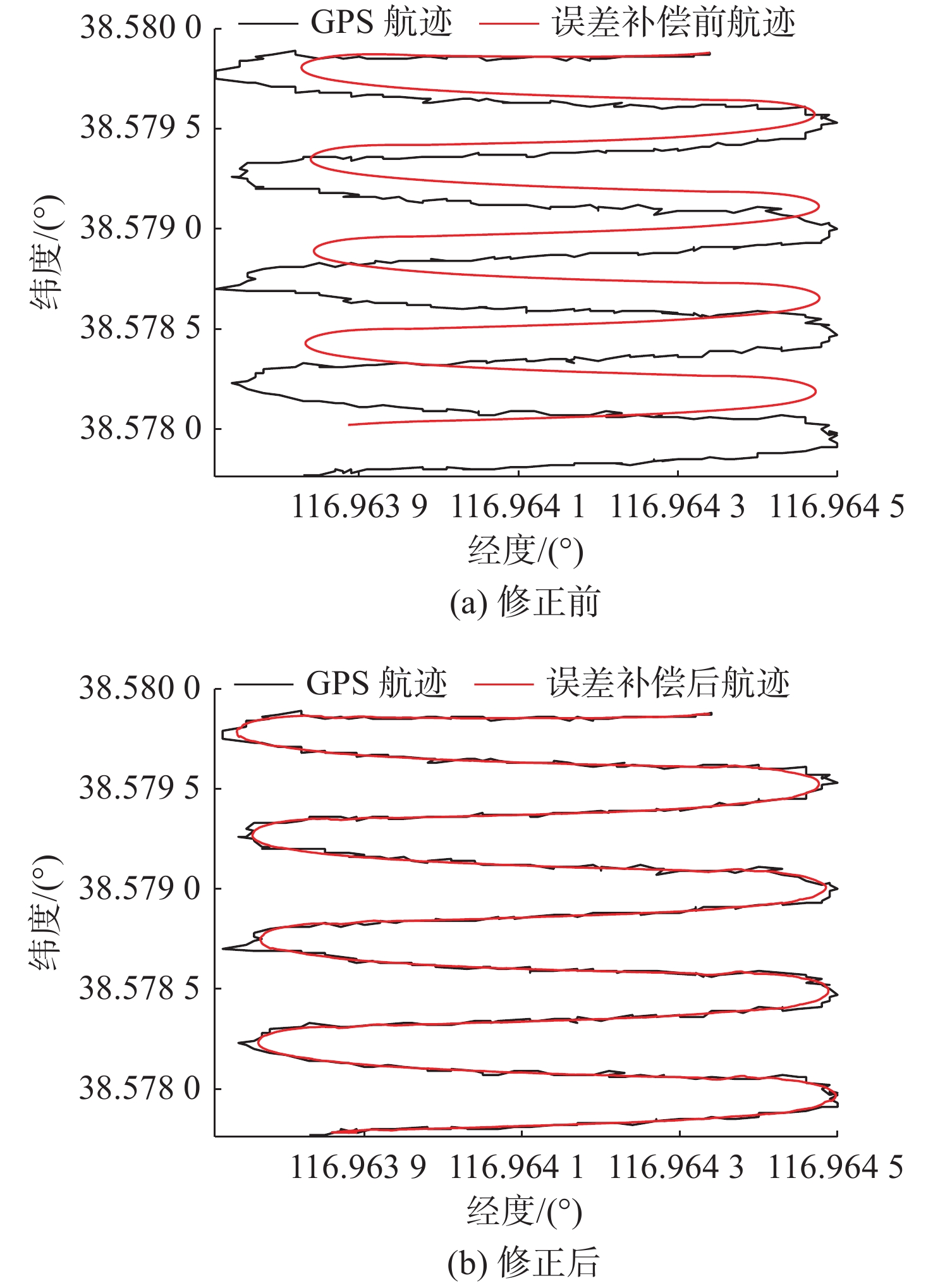
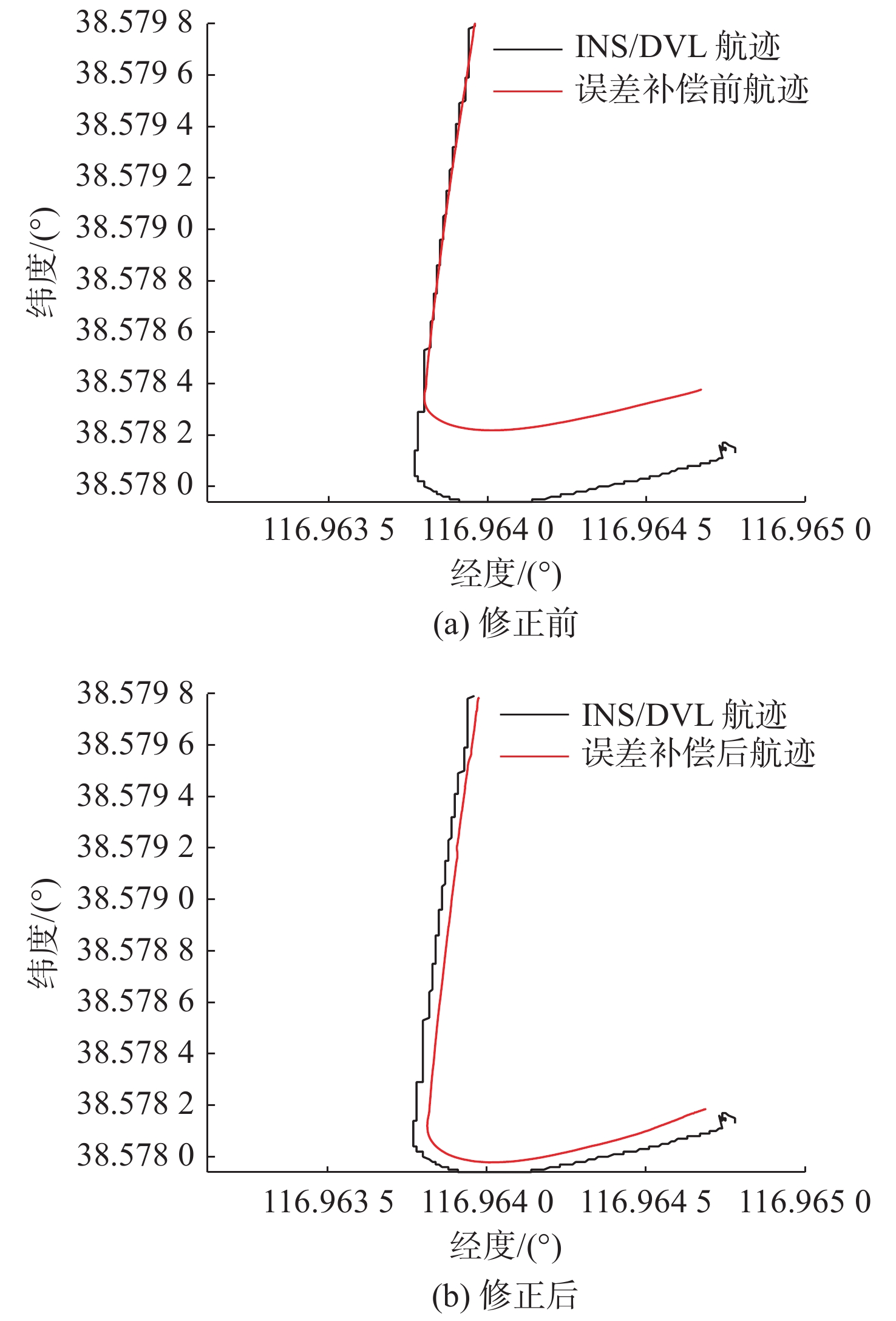
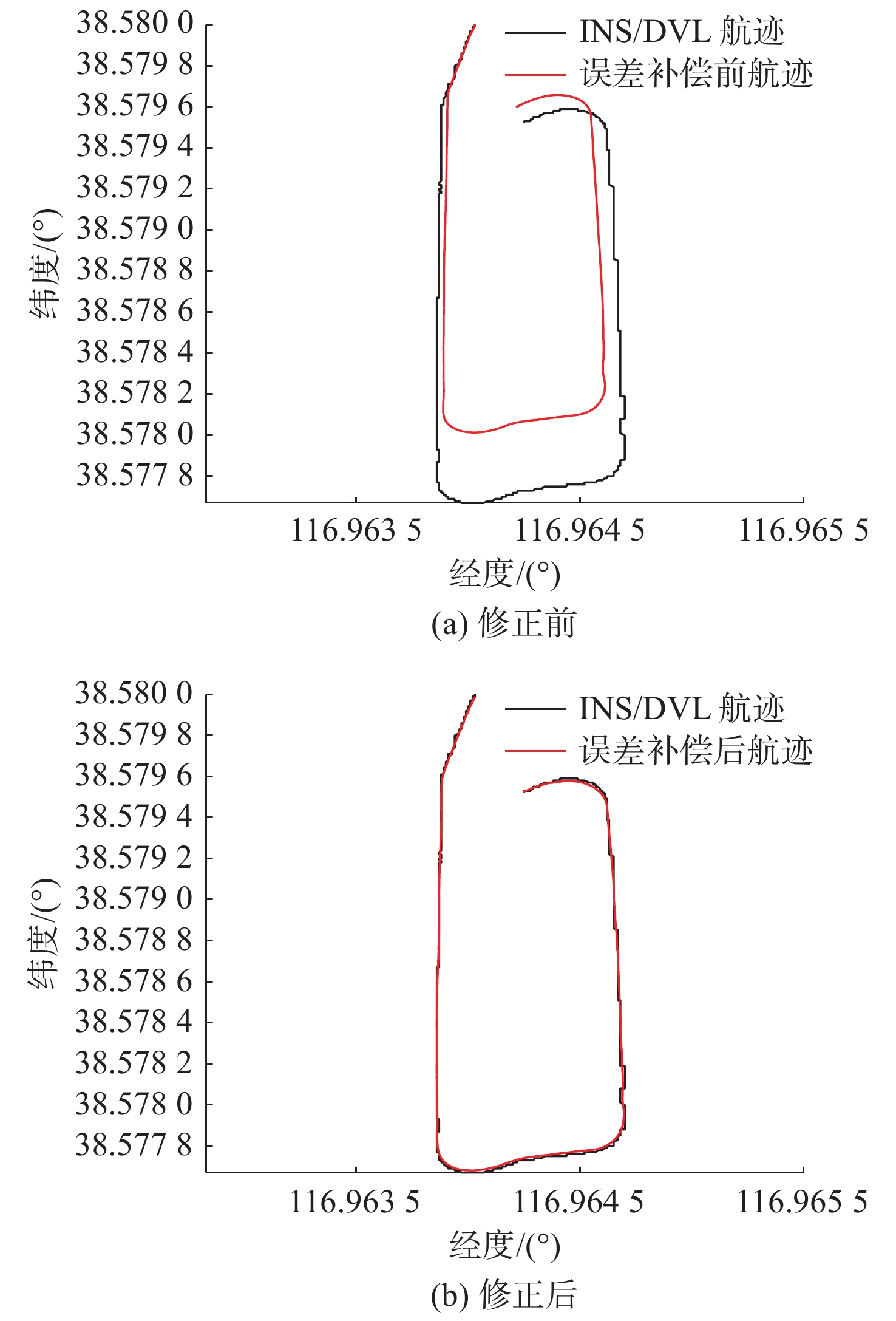
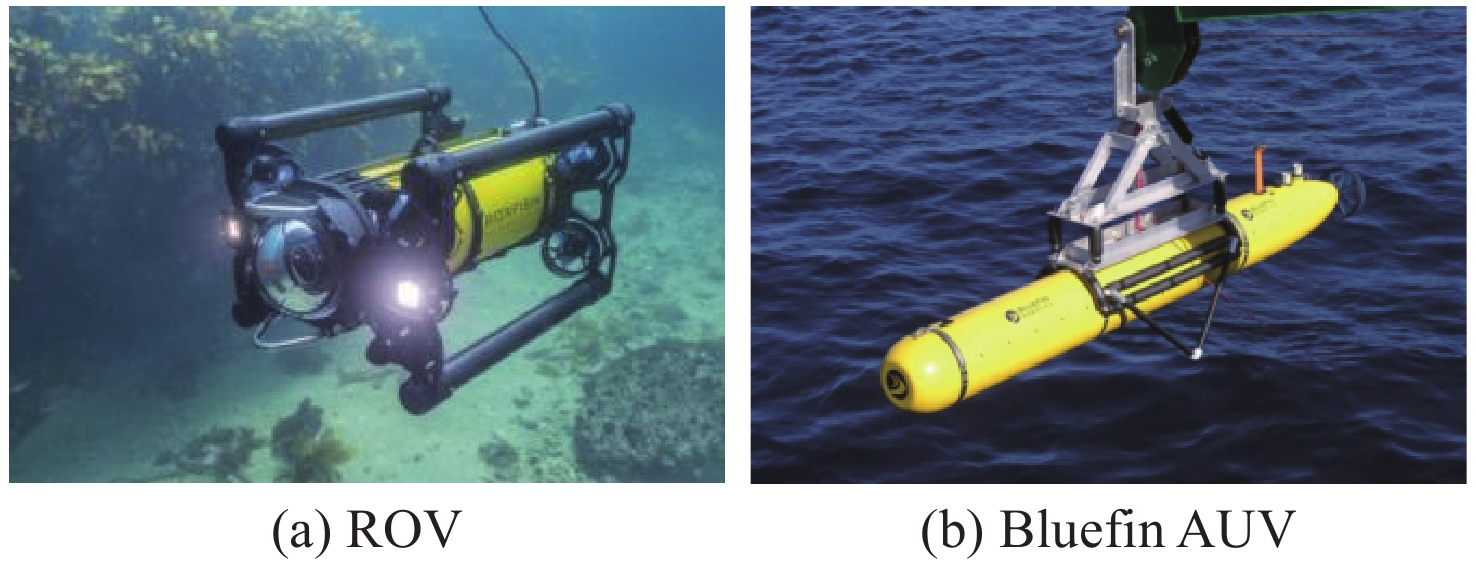
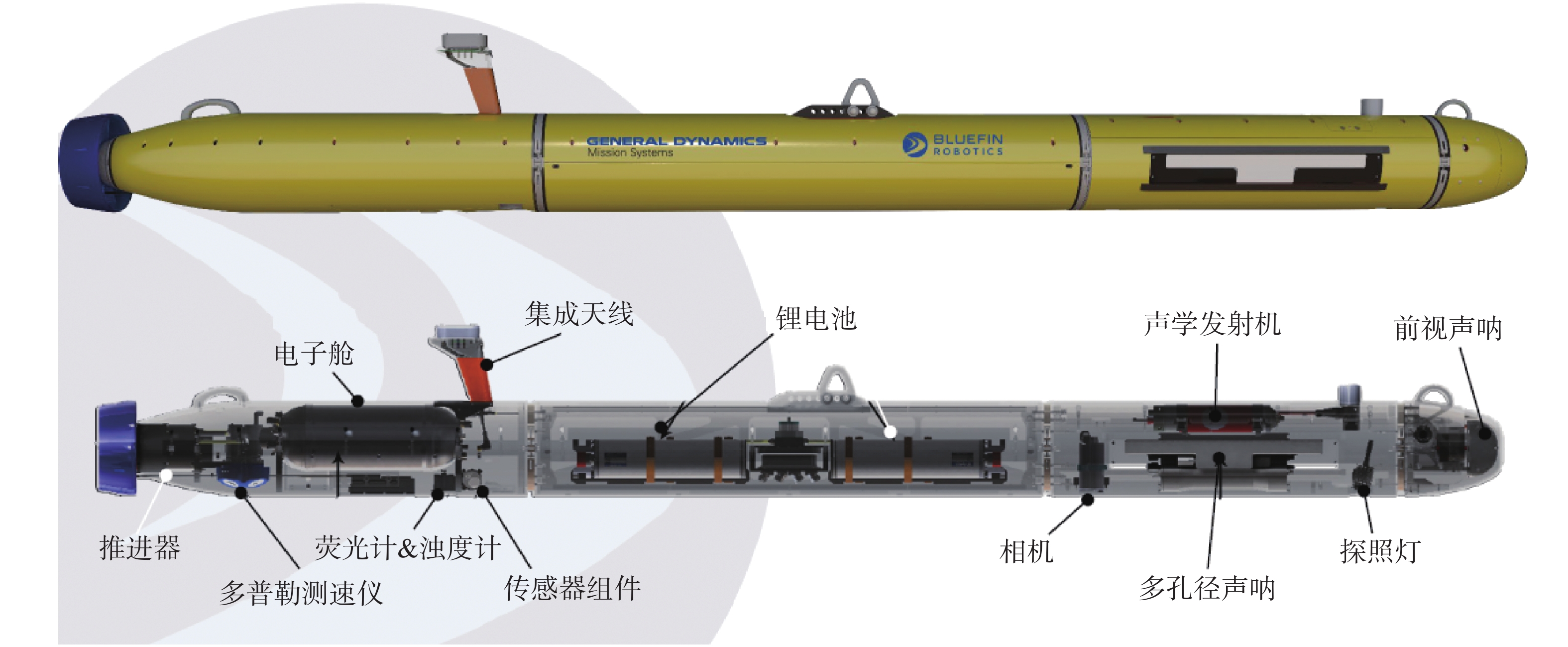
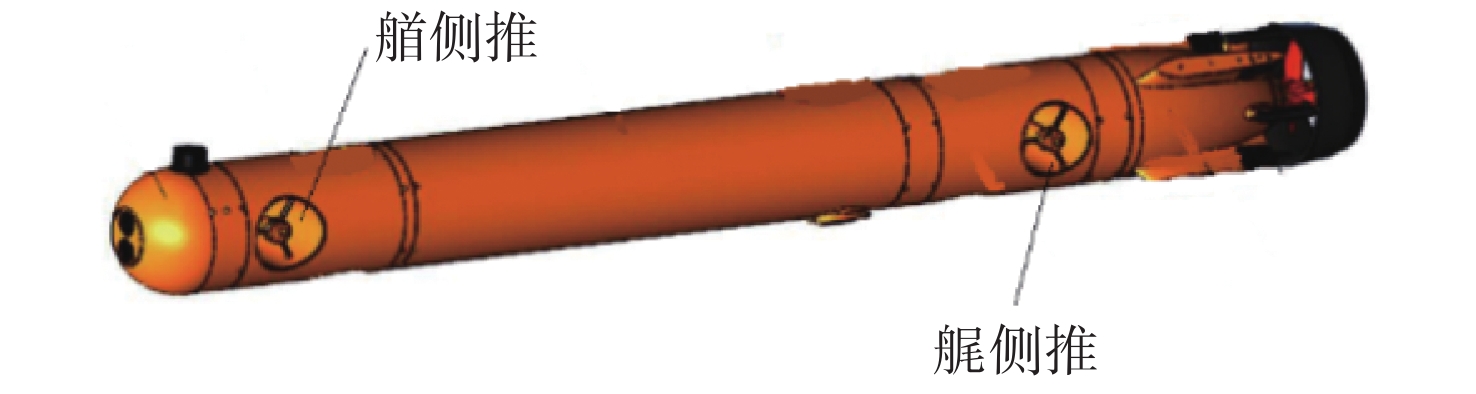
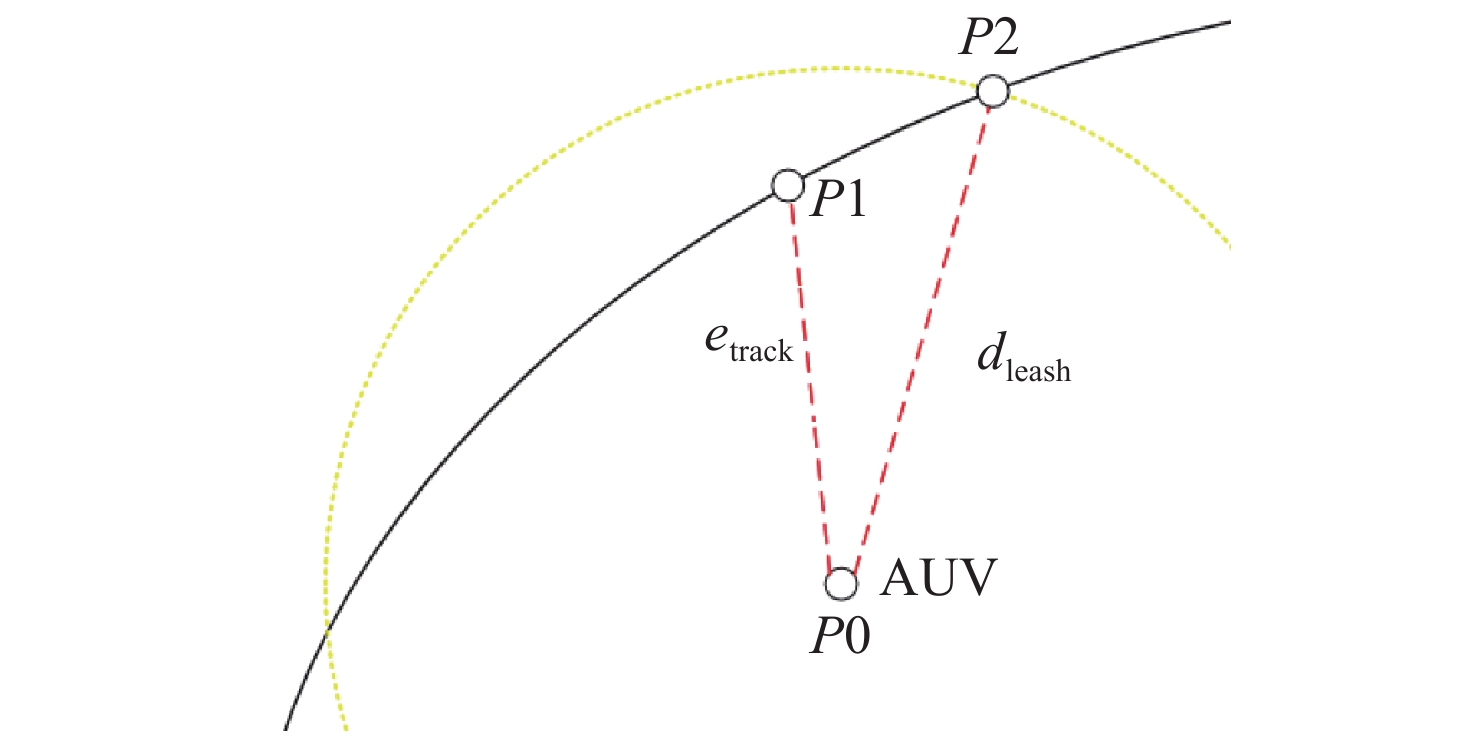
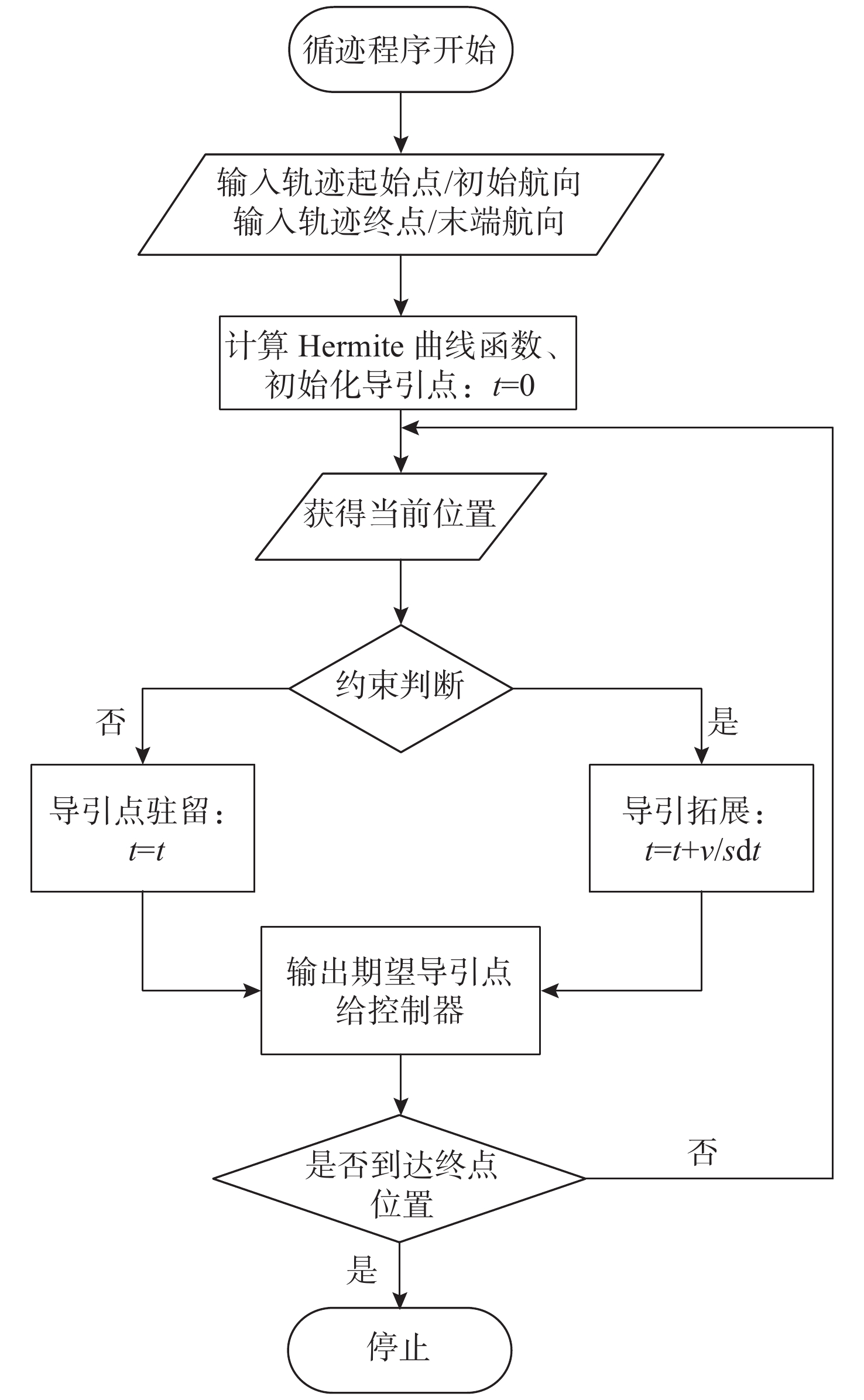
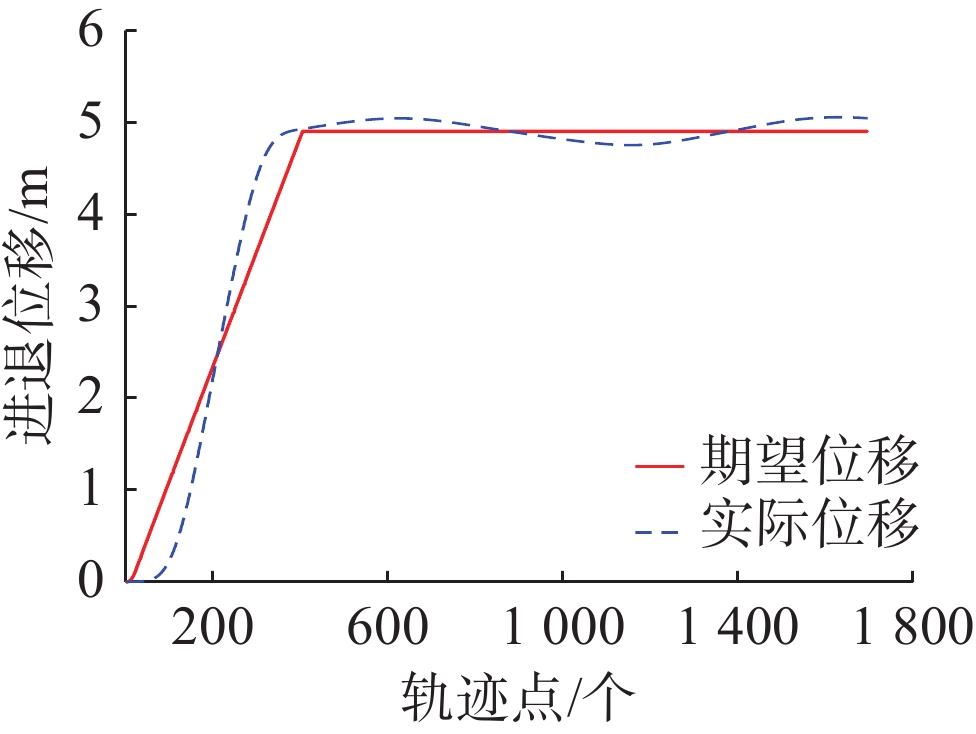
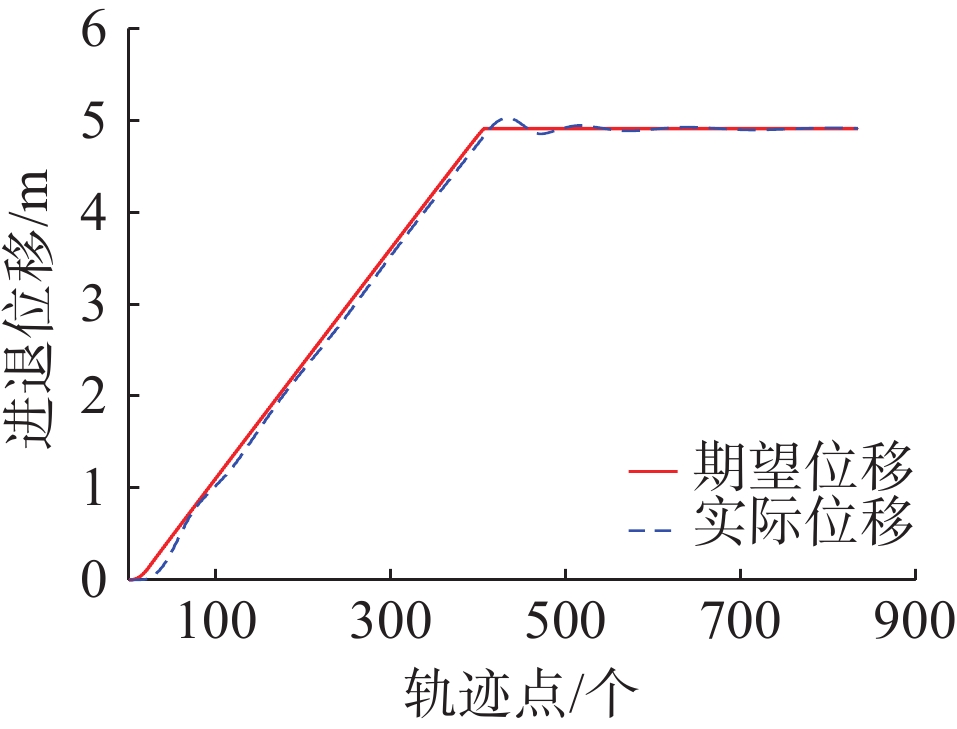
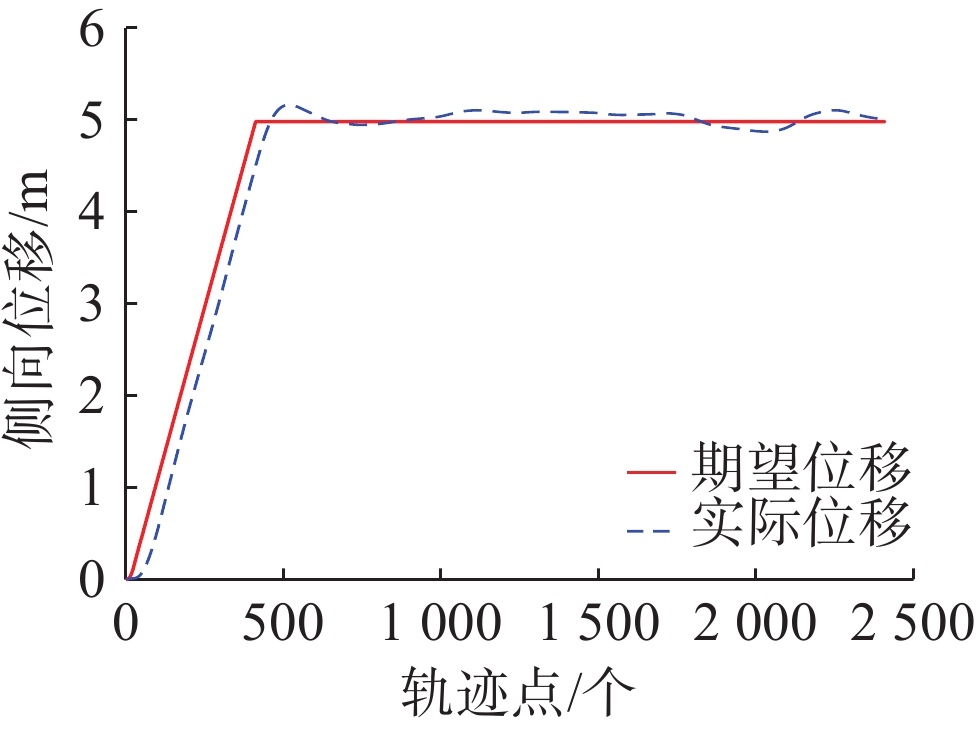
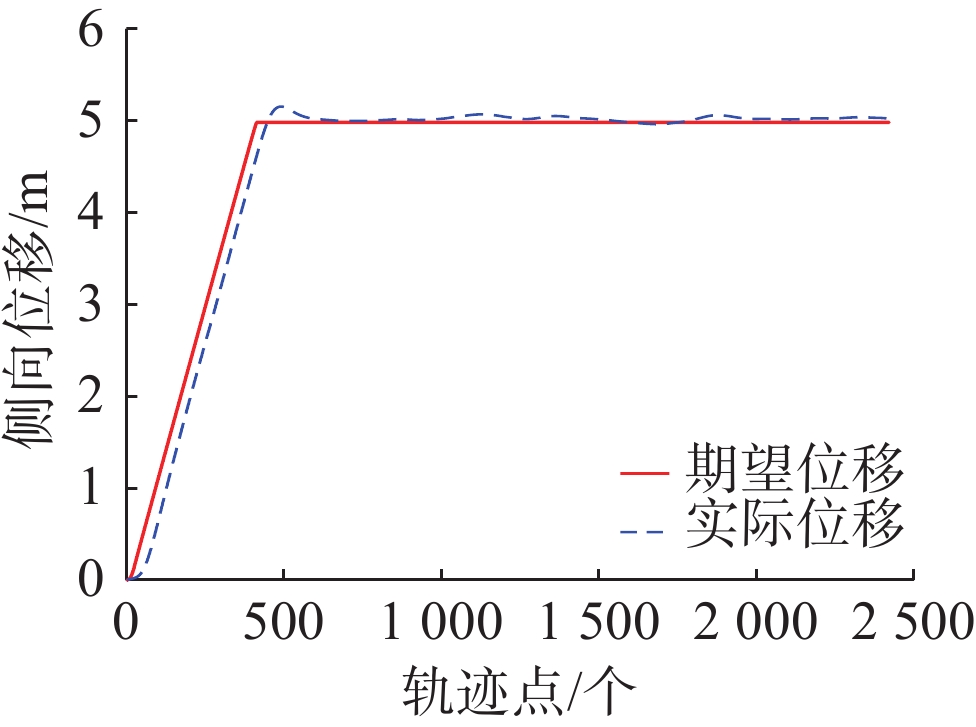
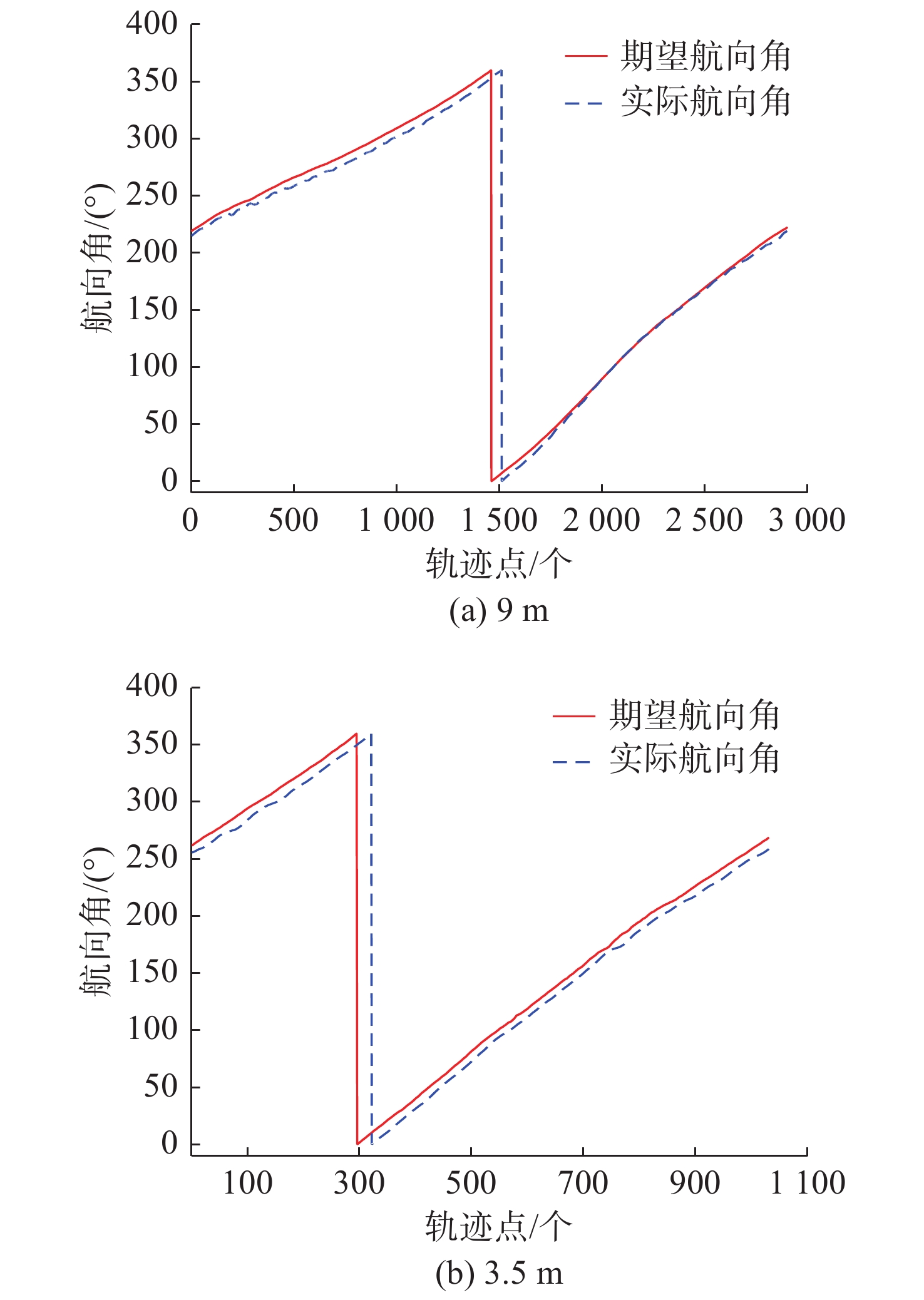
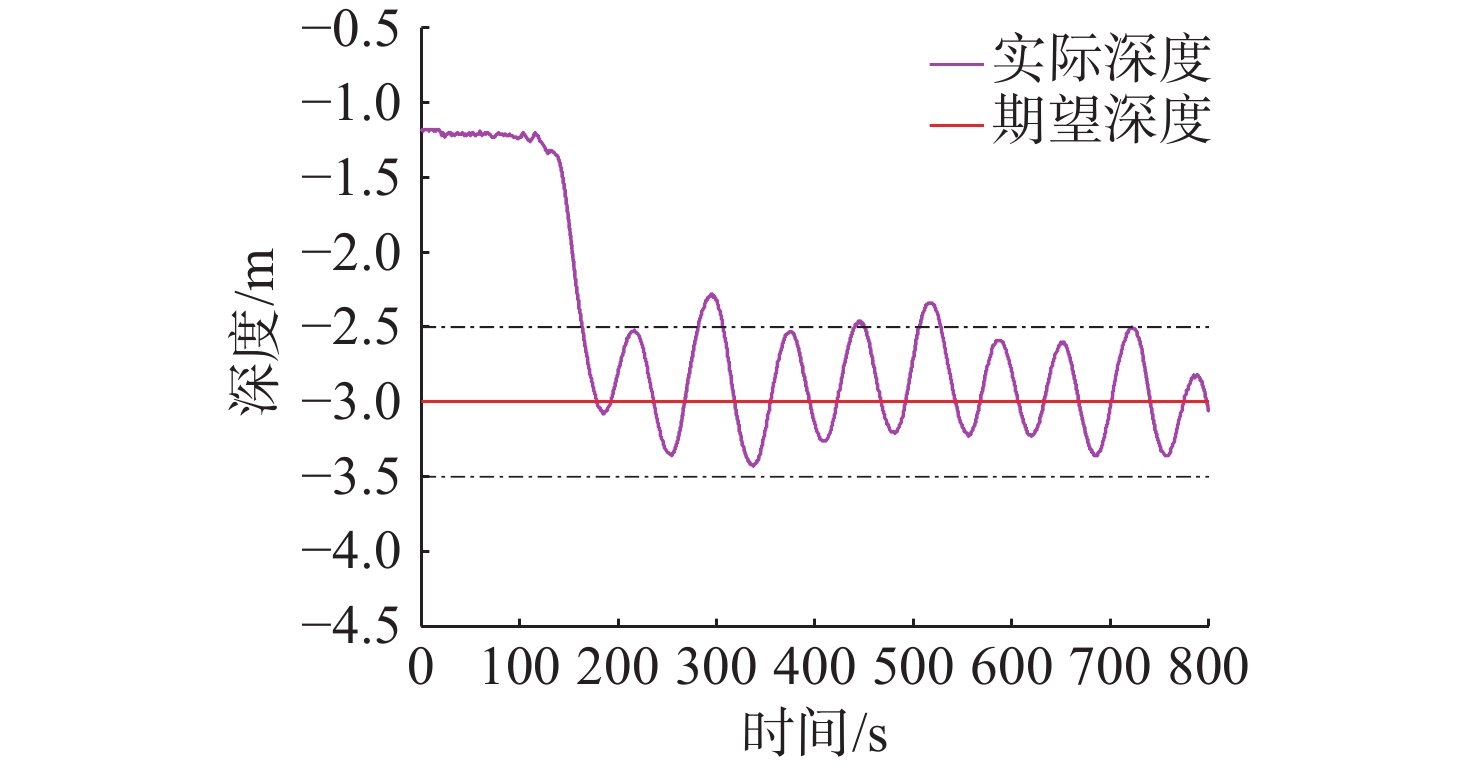
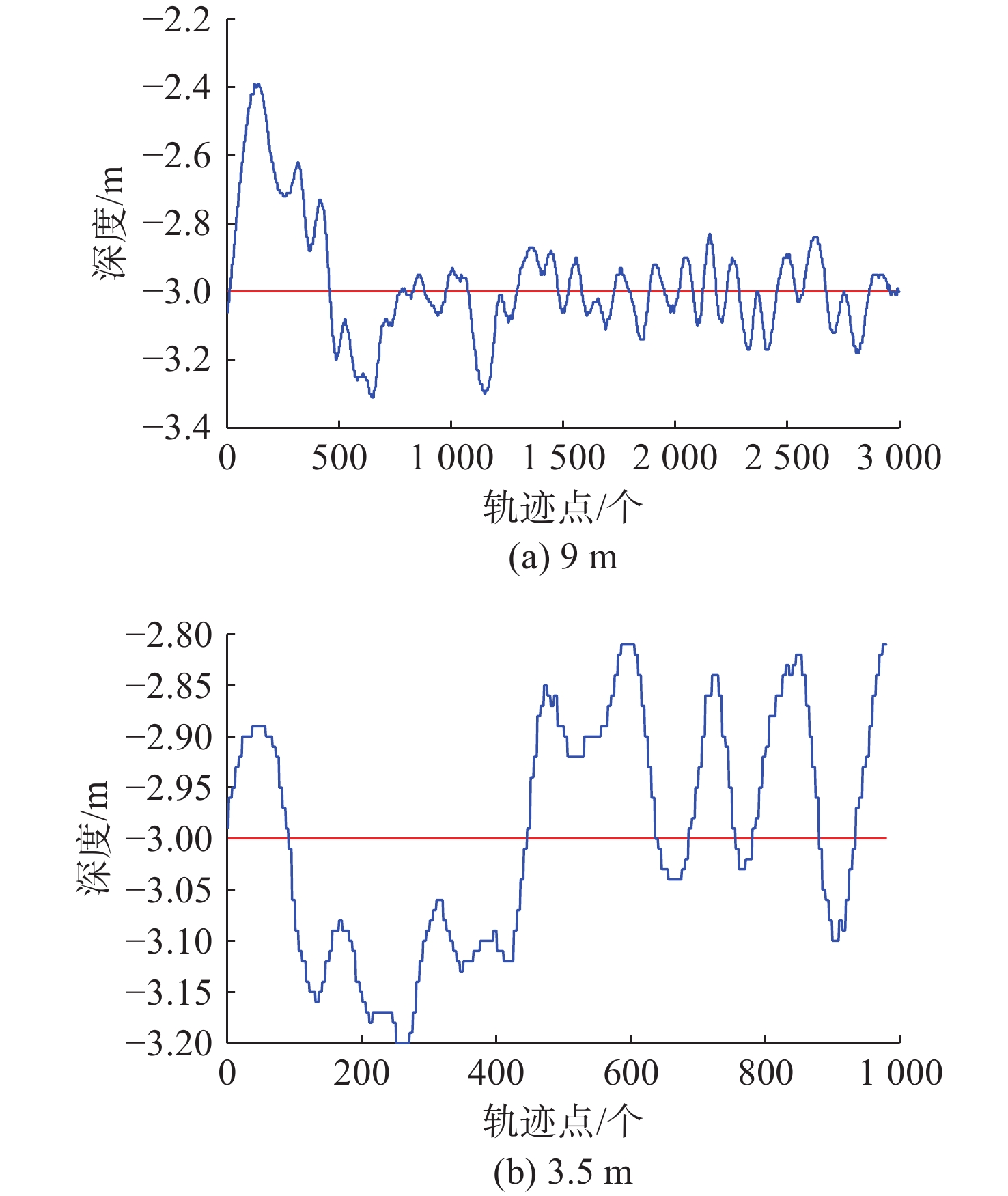
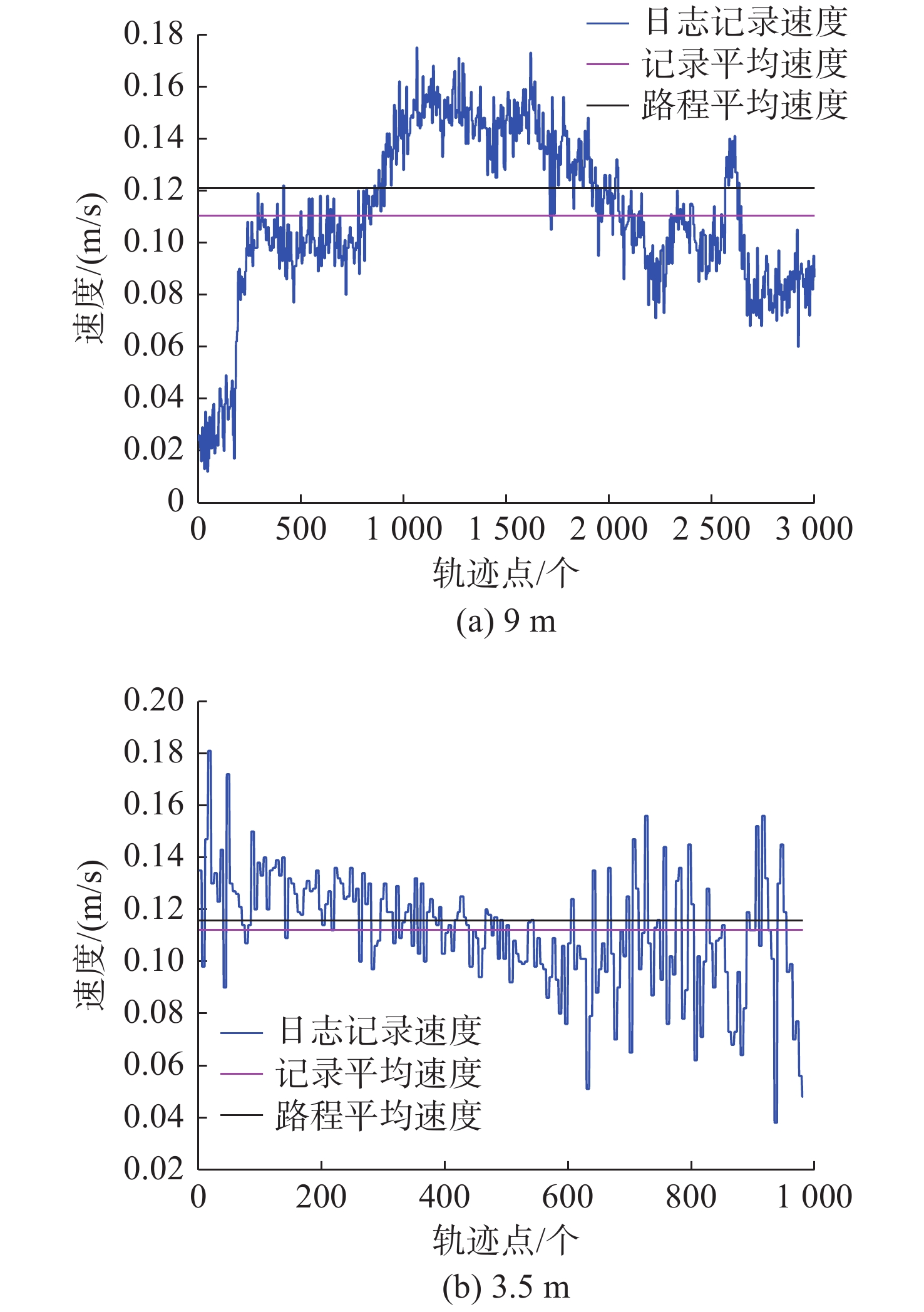
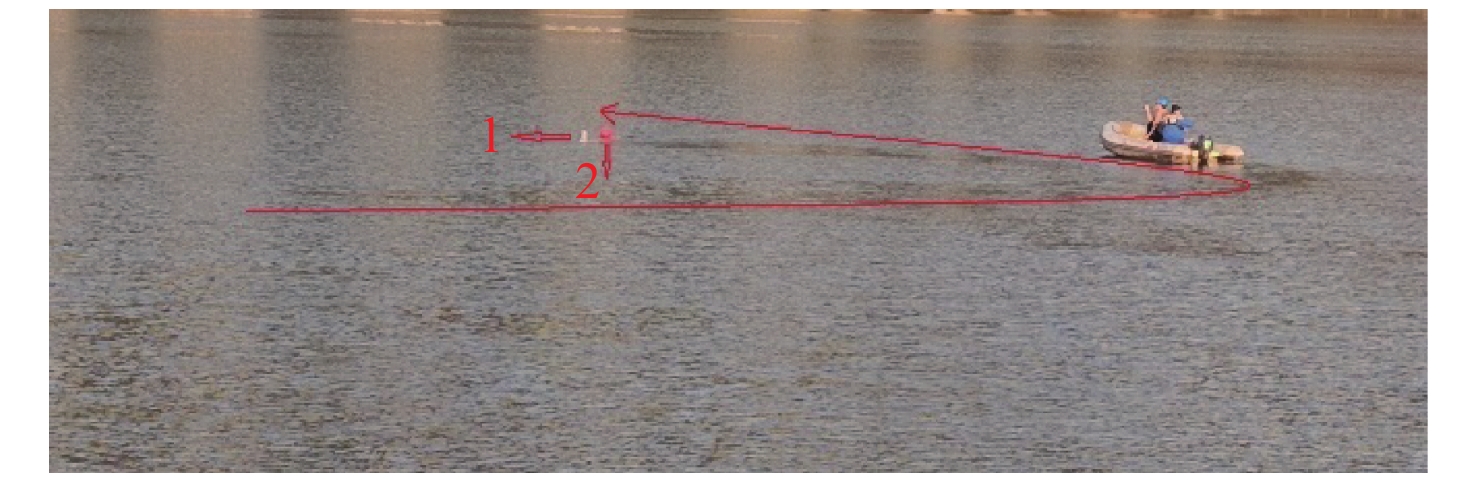
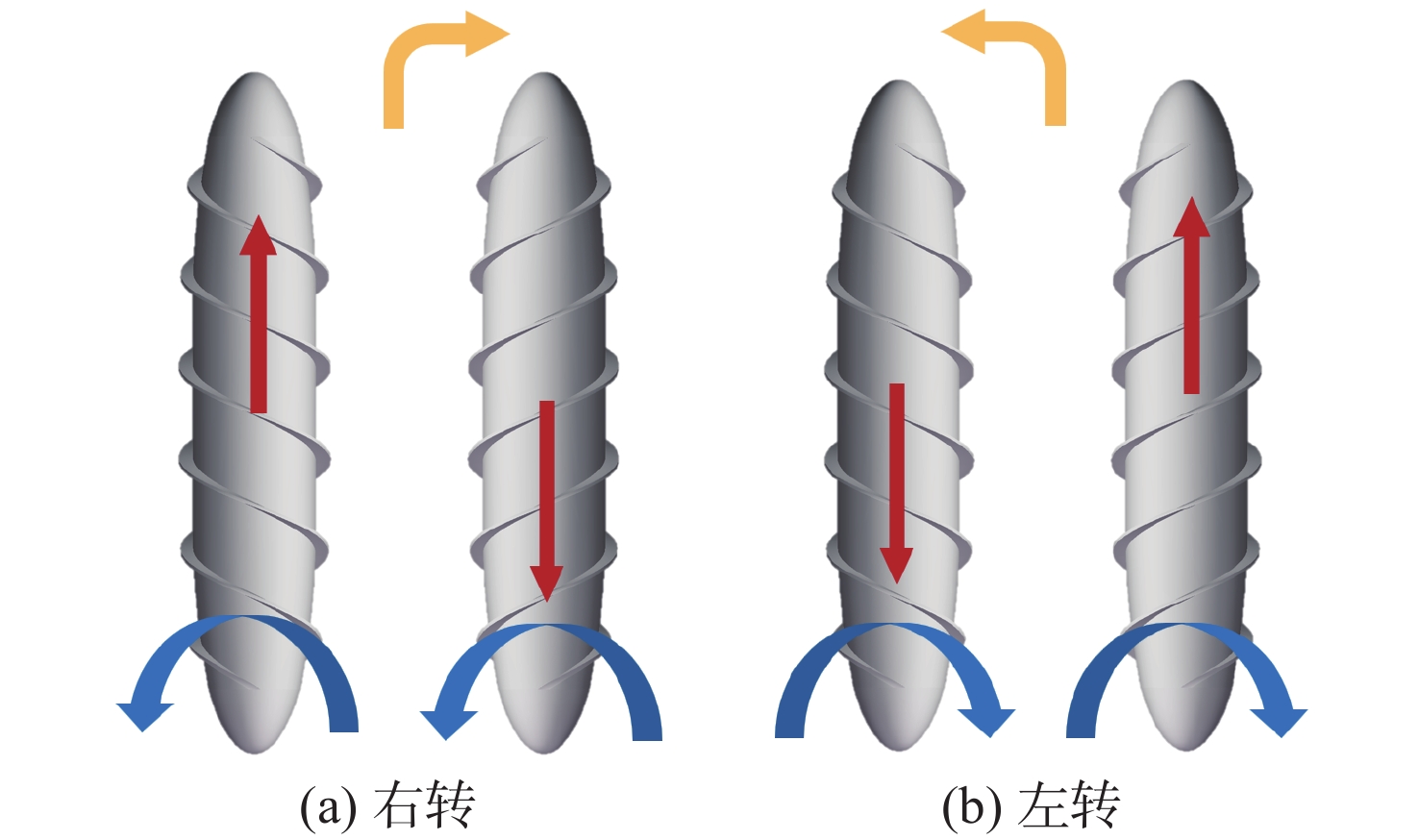
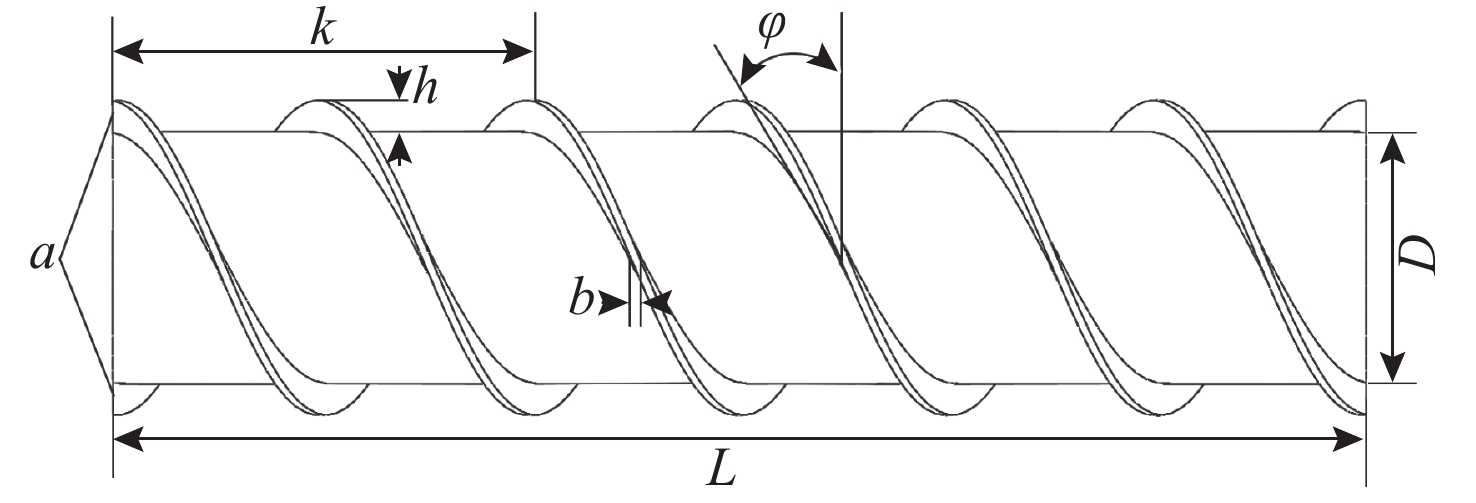
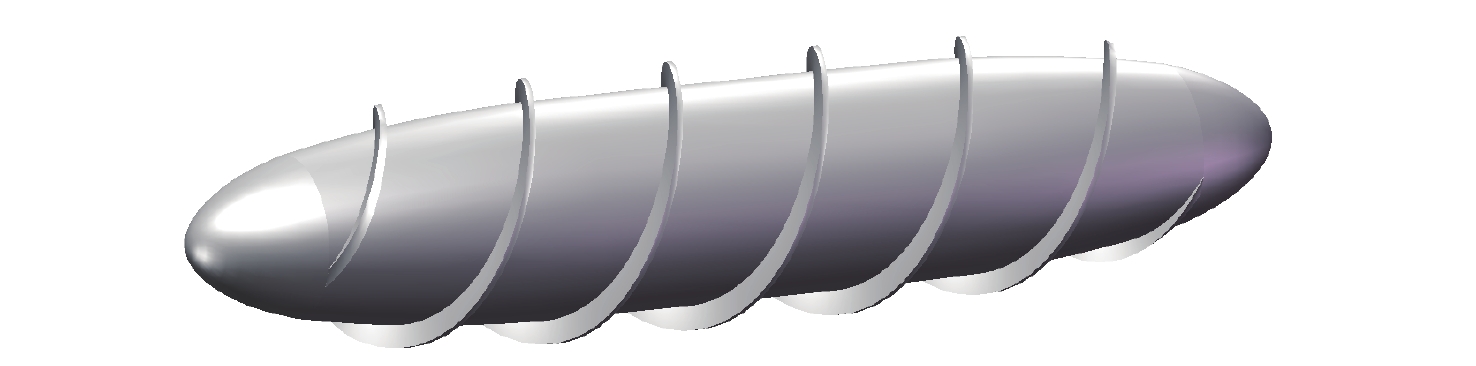
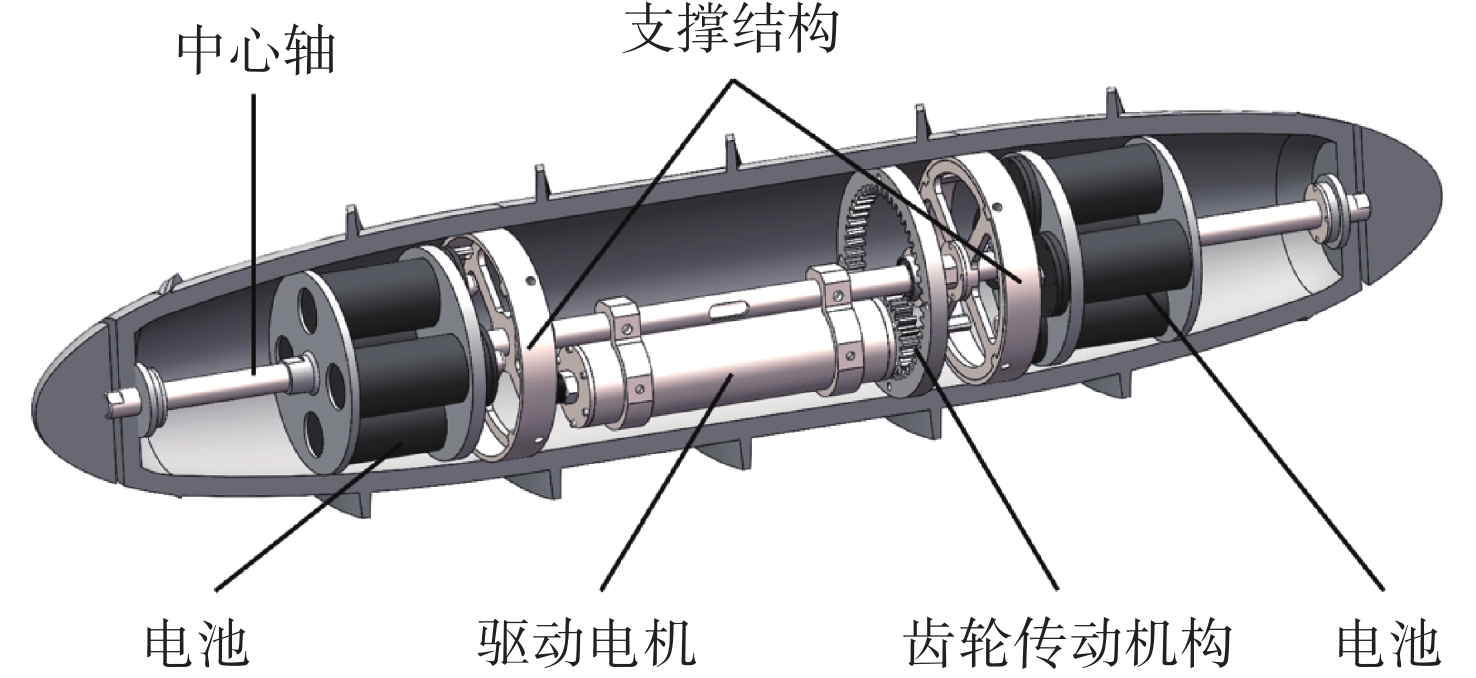
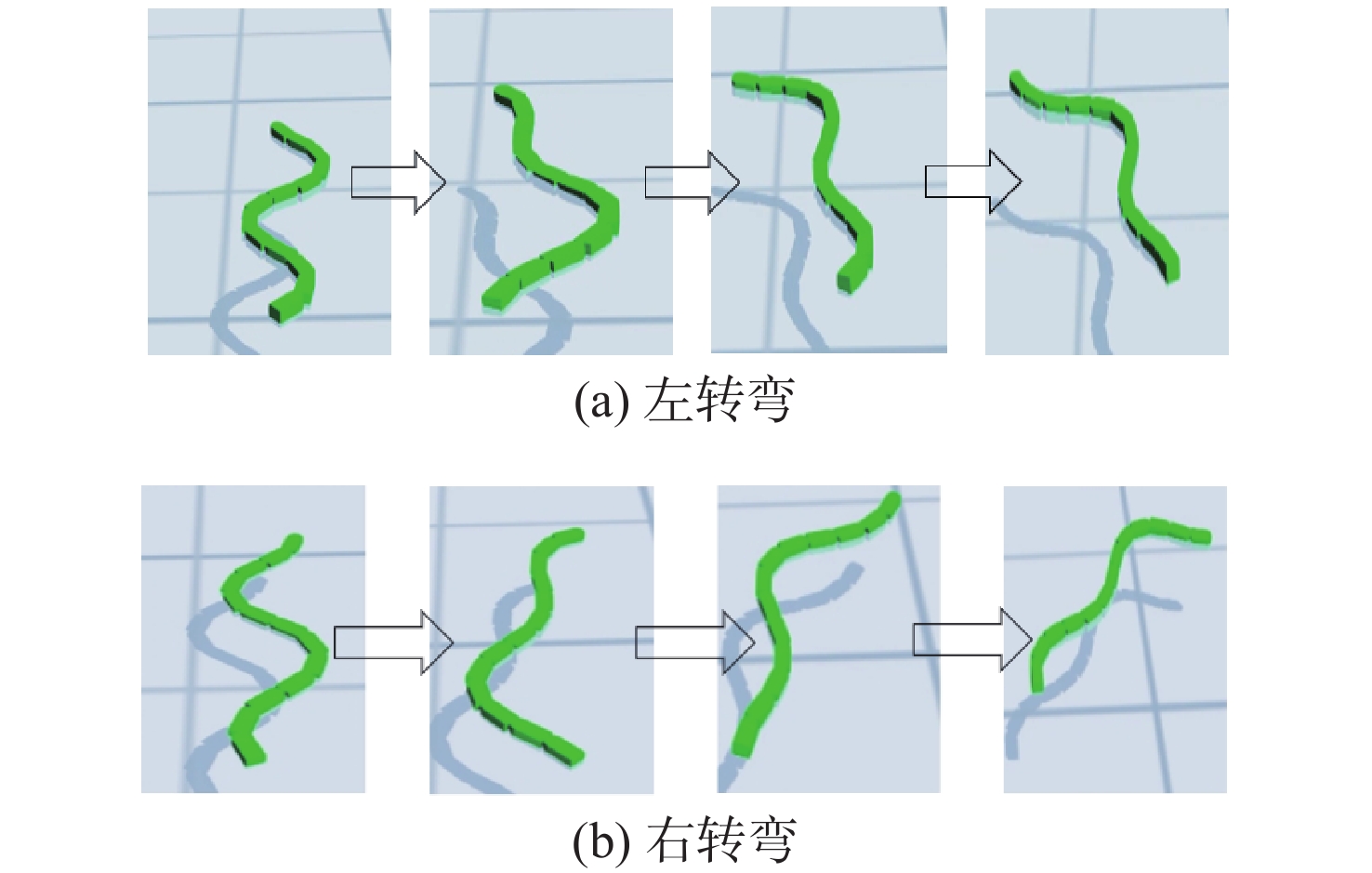
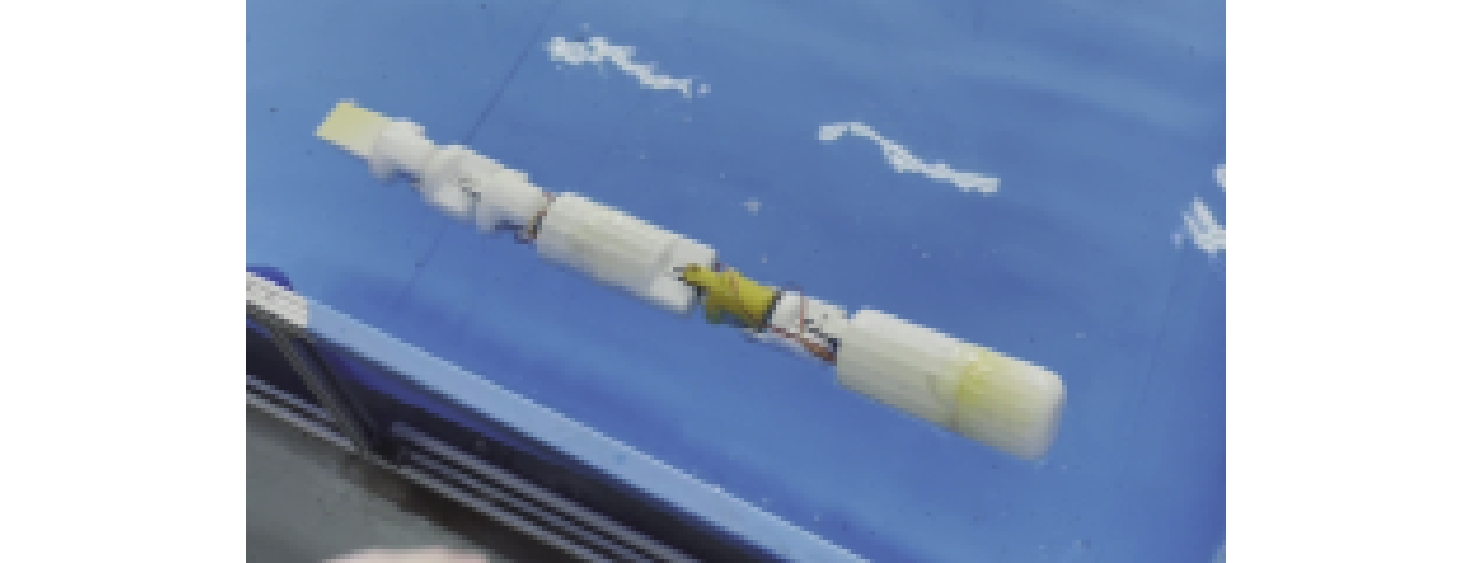
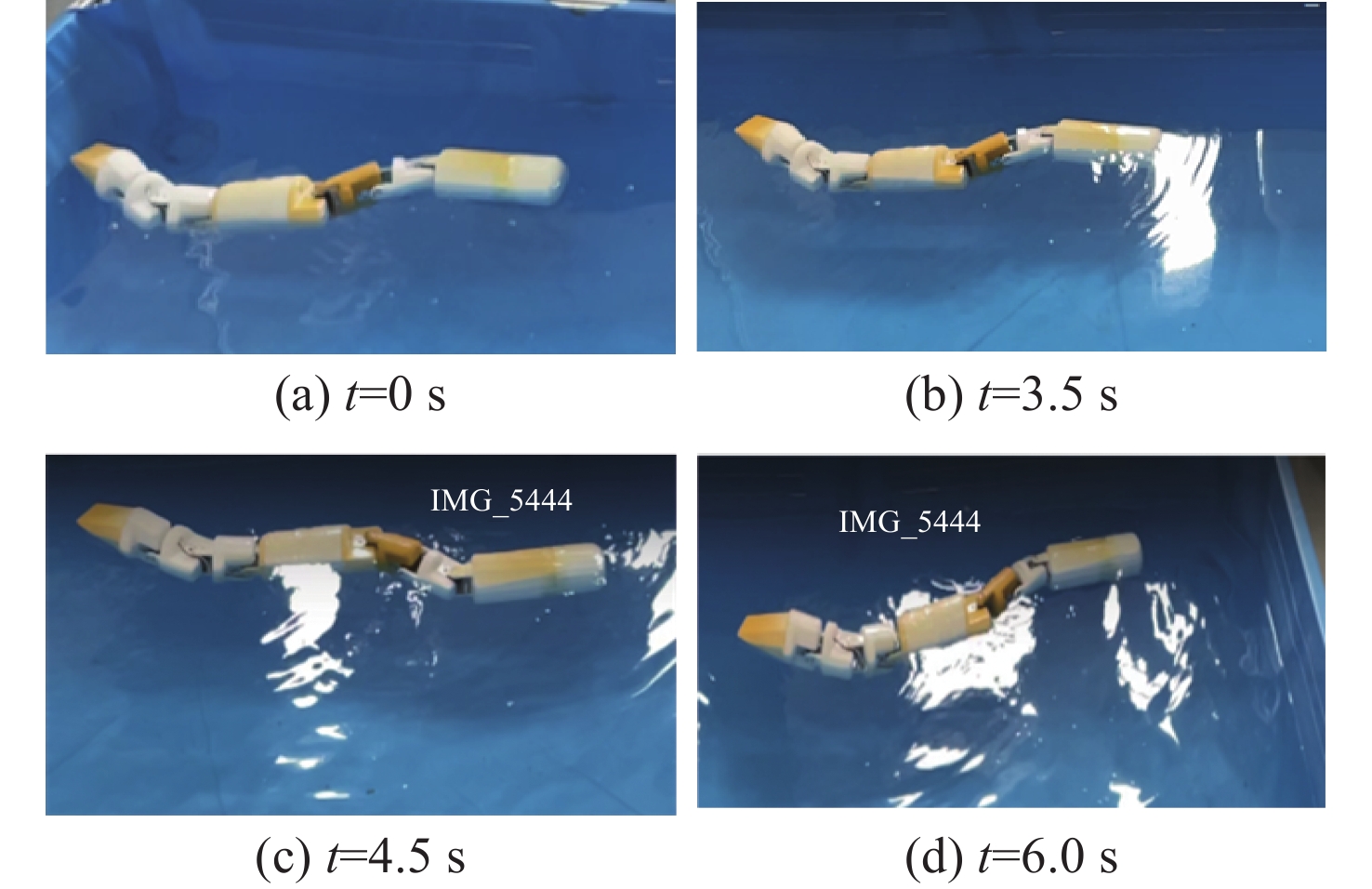
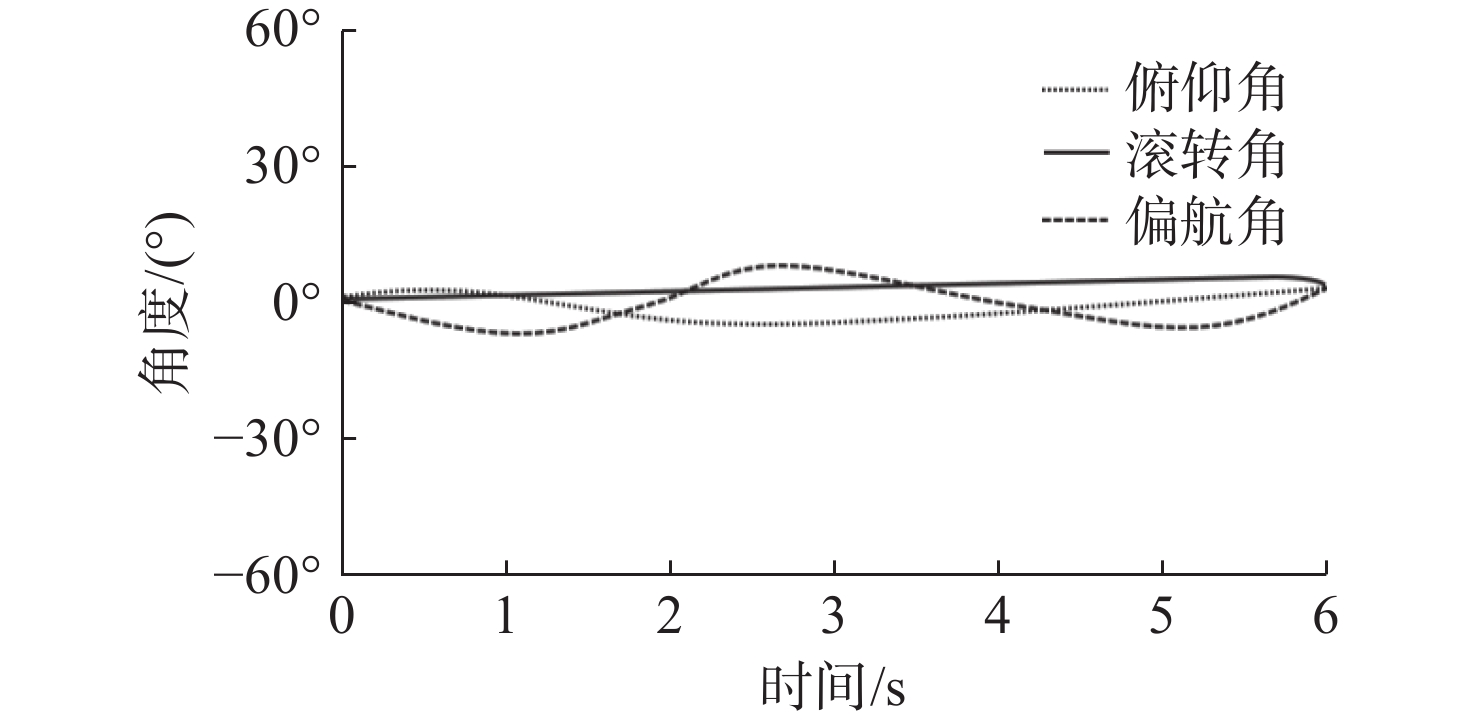
自主水下航行器(AUV)的精确轨迹跟踪能力是完成勘探、避障及管路巡检等水下任务的技术基础, 但AUV是典型欠驱动系统, 满足非完整动力学约束, 导致无法跟踪某些特殊轨迹, 也无法完成如守位调头、机头定点环绕观测等特殊水下动作。多数研究者基于欠驱动系统理论, 研究如何提升AUV水下轨迹跟踪能力, 文中则从结构改进的角度, 通过借鉴水下遥控航行器(ROV)构型设计提出了AUV全向运动轨迹跟踪控制方法。该方法在保留AUV原有低阻流线型的鱼雷状结构设计与运动模式的前提下, 再赋予其全向运动模式。文中以Bluefin系列AUV为例, 设计改造全向式运动结构, 开发基于Hermite算法的轨迹生成算法、基于缩放因子的轨迹导引算法以及航行-航向混合控制算法, 并对控制方法进行了仿真与水下试验验证。结果表明, 该方法能够实现AUV全向航行, 解决AUV轨迹跟踪中的运动约束问题, 使AUV具备对任意轨迹的跟踪能力, 并完成了特殊的水下动作。
徐江鹏, 王俊雷, 唐怡. AUV全向运动轨迹跟踪控制方法[J]. 水下无人系统学报, 2024, 32(6): 1018-1028. doi: 10.11993/j.issn.2096-3920.2024-0084.