

Omnidirectional Motion Trajectory Tracking Control Method for AUVs
-
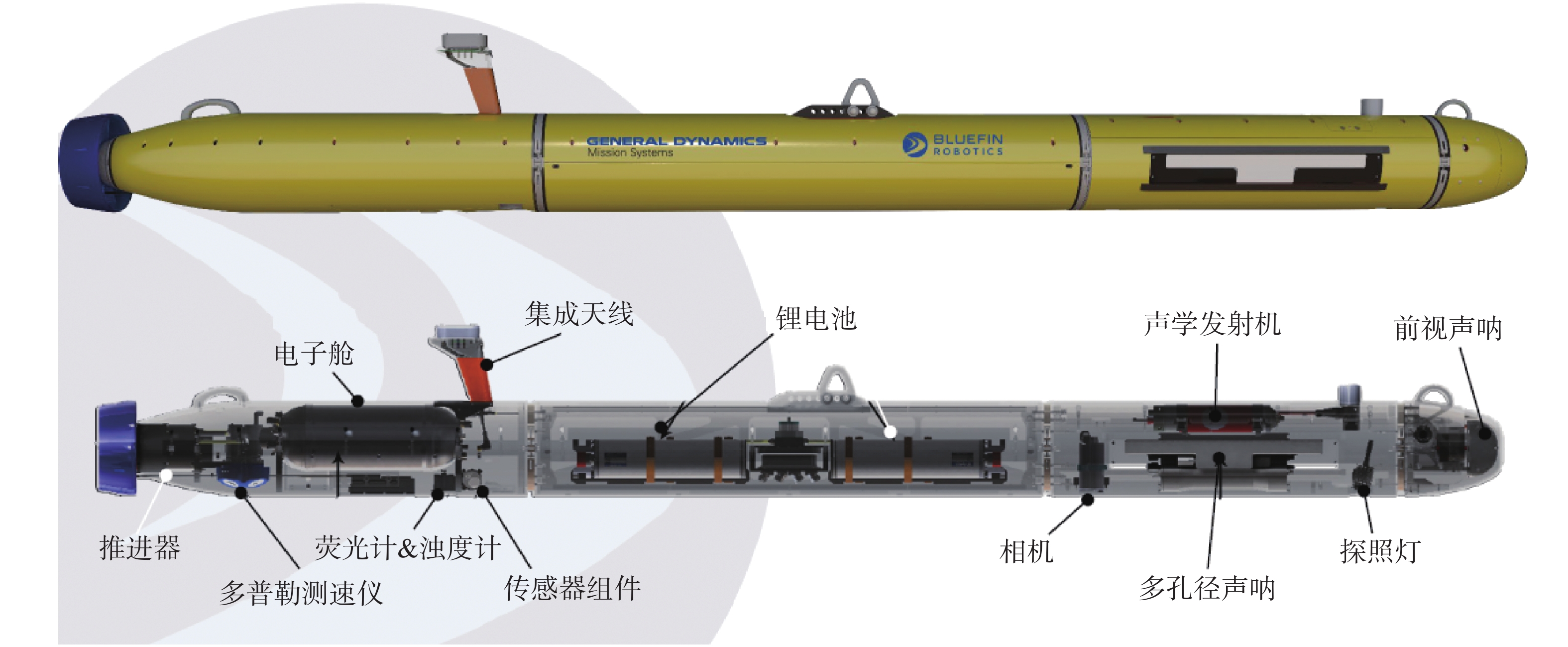
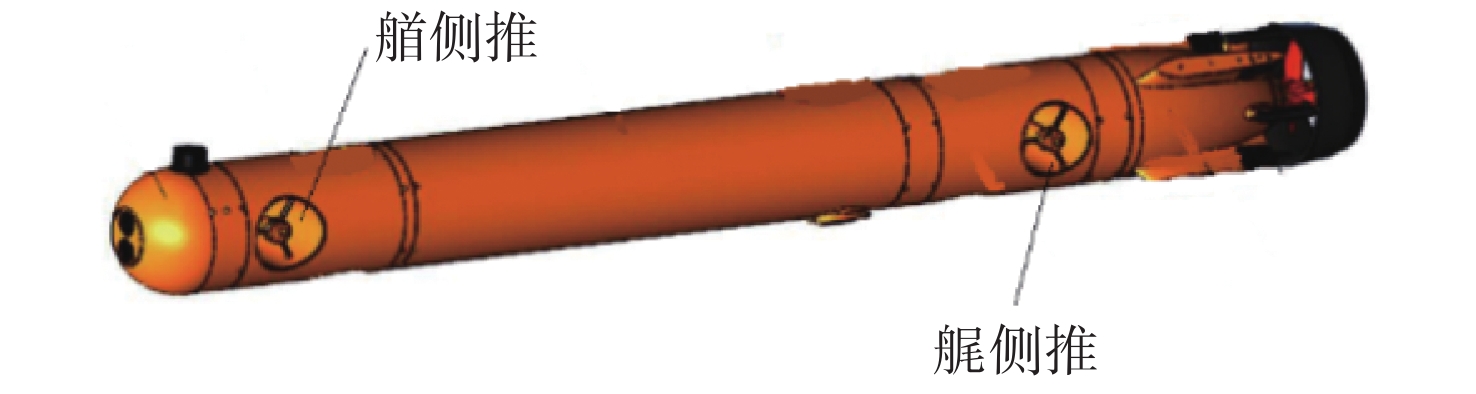
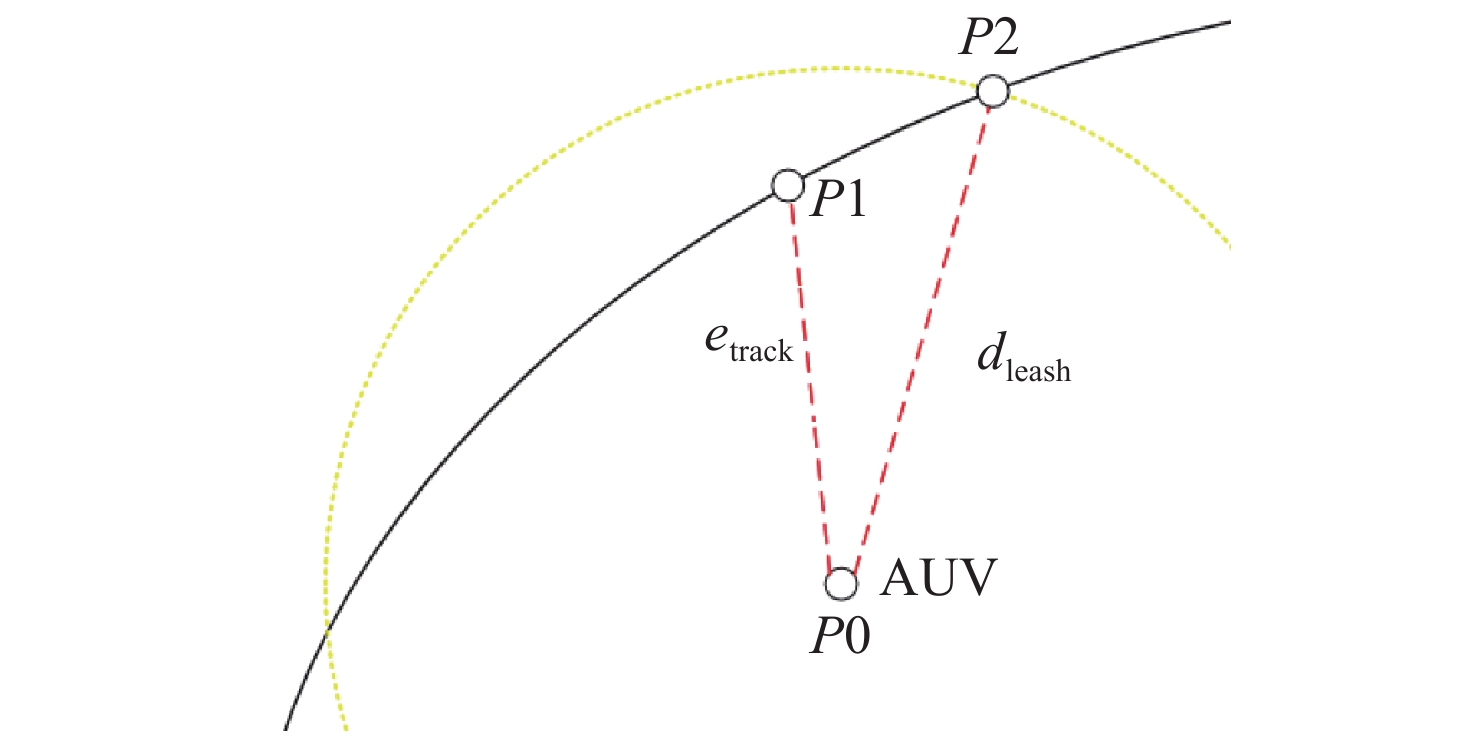
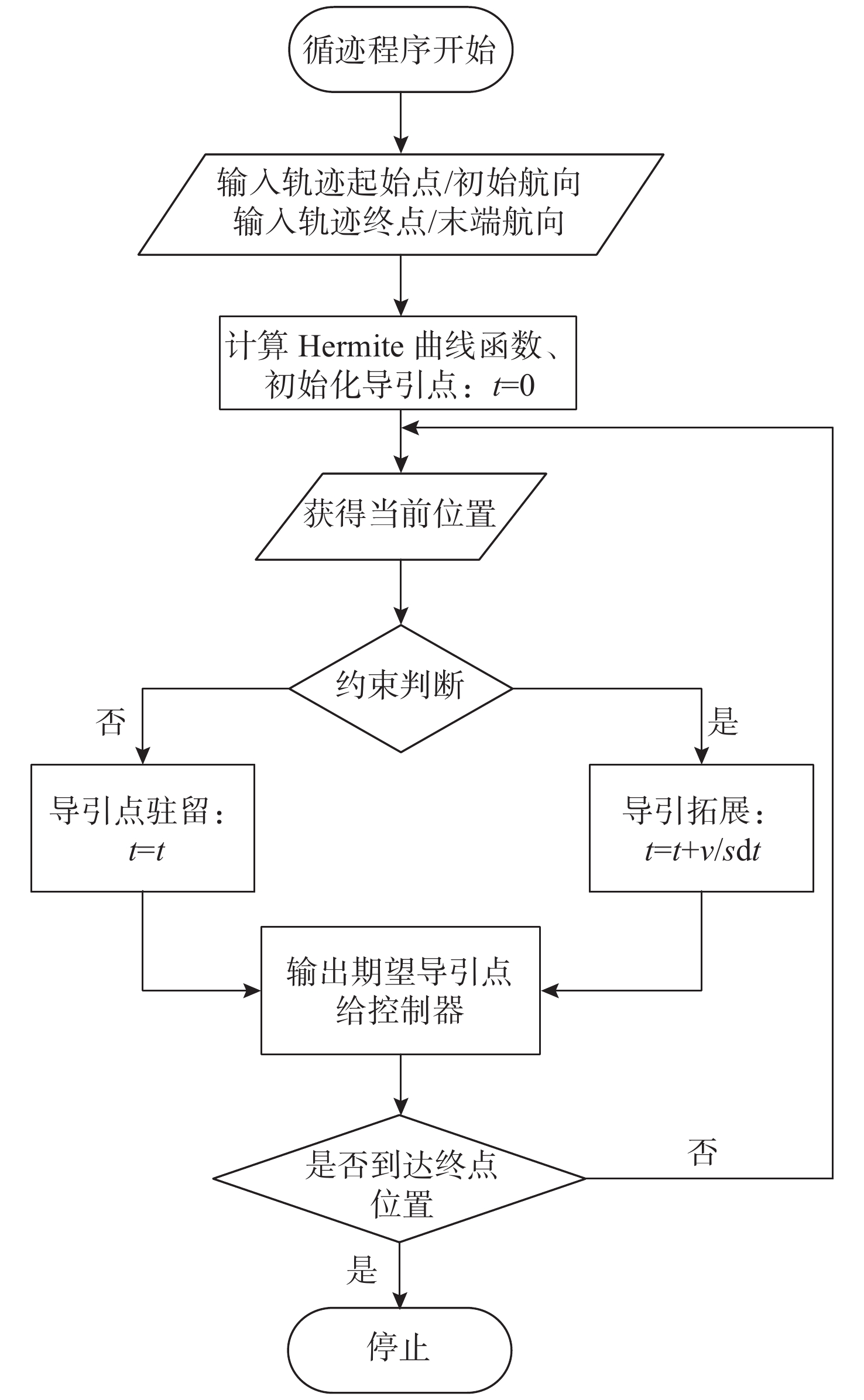
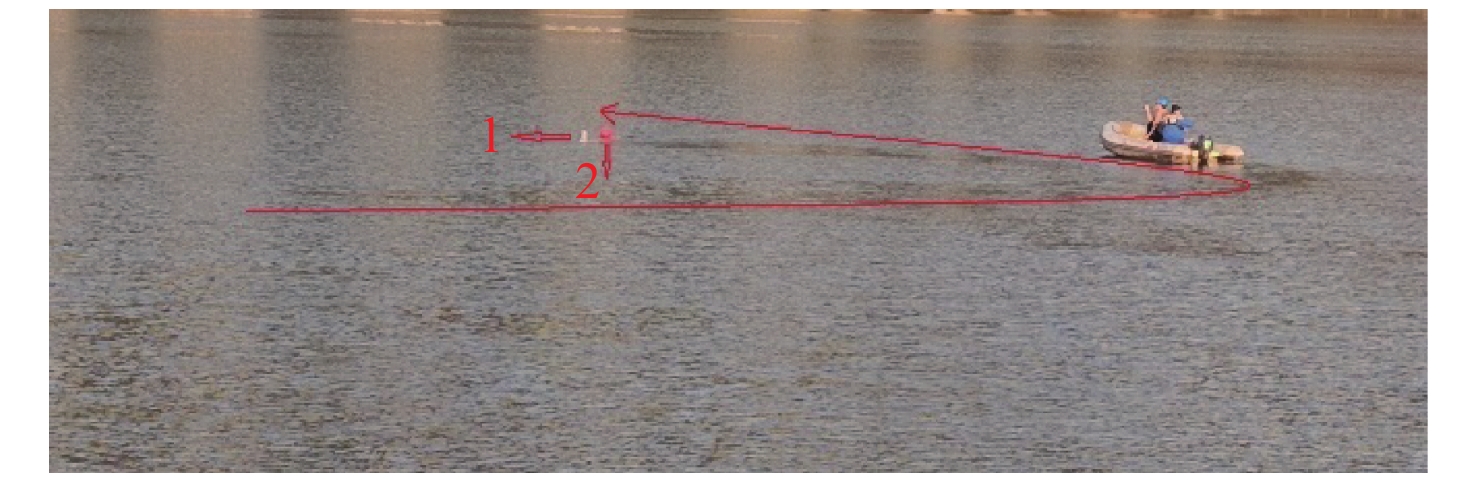
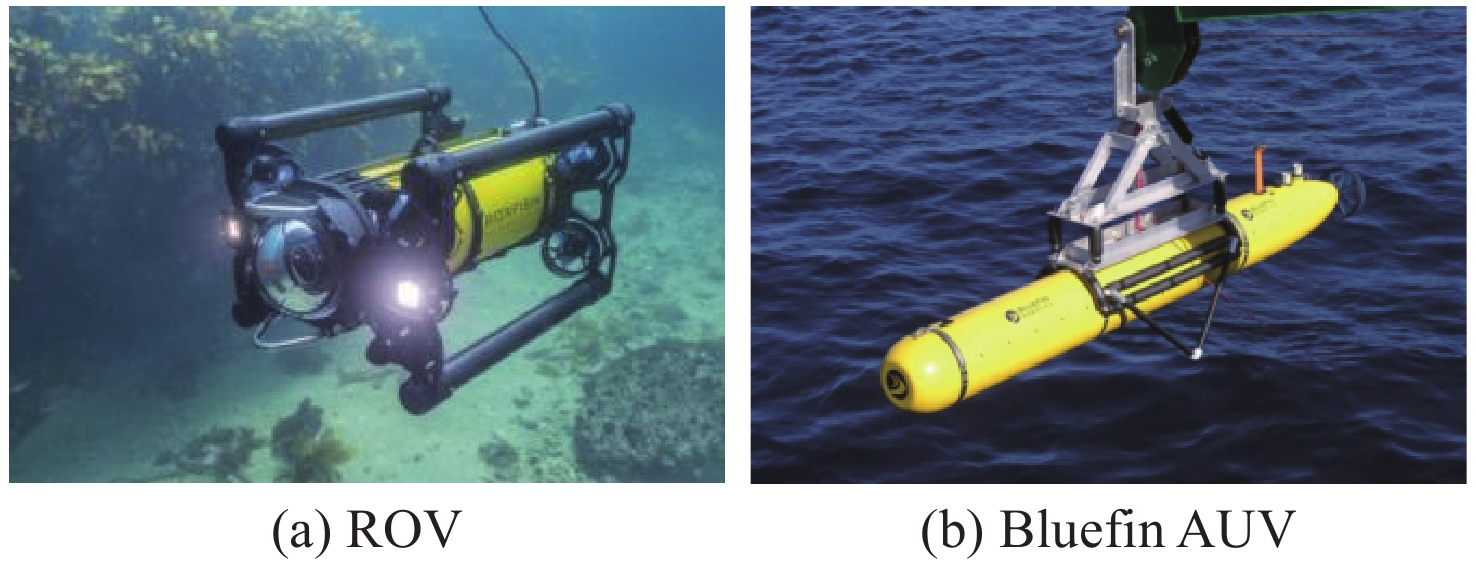
摘要: 自主水下航行器(AUV)的精确轨迹跟踪能力是完成勘探、避障及管路巡检等水下任务的技术基础, 但AUV是典型欠驱动系统, 满足非完整动力学约束, 导致无法跟踪某些特殊轨迹, 也无法完成如守位调头、机头定点环绕观测等特殊水下动作。多数研究者基于欠驱动系统理论, 研究如何提升AUV水下轨迹跟踪能力, 文中则从结构改进的角度, 通过借鉴水下遥控航行器(ROV)构型设计提出了AUV全向运动轨迹跟踪控制方法。该方法在保留AUV原有低阻流线型的鱼雷状结构设计与运动模式的前提下, 再赋予其全向运动模式。文中以Bluefin系列AUV为例, 设计改造全向式运动结构, 开发基于Hermite算法的轨迹生成算法、基于缩放因子的轨迹导引算法以及航行-航向混合控制算法, 并对控制方法进行了仿真与水下试验验证。结果表明, 该方法能够实现AUV全向航行, 解决AUV轨迹跟踪中的运动约束问题, 使AUV具备对任意轨迹的跟踪能力, 并完成了特殊的水下动作。Abstract: The precise trajectory tracking capability of autonomous undersea vehicles(AUVs) is crucial for completing underwater tasks such as exploration, obstacle avoidance, and pipeline inspection. However, AUVs are typically underactuated systems that satisfy non-holonomic dynamic constraints, and they cannot track some specific trajectories or perform some specific underwater maneuvers, such as station-keeping U-turns and point-circling observations. Most researchers focus on improving the trajectory tracking capability of AUVs based on underactuated system theory. This paper, however, proposed a new omnidirectional motion trajectory tracking control method for AUVs from the perspective of structural improvement, drawing on the configuration design of remotely operated vehicles(ROVs). The method retained the original low-drag streamlined torpedo-like structural design and motion mode of AUVs while endowing them with a new omnidirectional motion mode. Using the Bluefin series AUV as an example, the paper designed and modified the omnidirectional motion structure and developed a trajectory generation algorithm based on the Hermite algorithm, a trajectory guidance algorithm based on the scaling factor, and a sailing-heading hybrid control algorithm. Both simulation and underwater experiments validate the control method. The results show this method can achieve omnidirectional navigation, solve motion constraint problems in AUV trajectory tracking, enable them to track any trajectory, and complete specific underwater maneuvers.
-
表 1 T200推进器部分性能参数
Table 1. Partial performance parameters of T200 thruster
电压/V 最大功率/W 推力/(kg·f) 效率/(g/W) 10 136.0 2.93 21.5 12 202.9 3.71 18.3 14 285.0 4.52 15.9 16 381.3 5.25 13.8 18 496.3 6.02 12.1 20 624.2 6.72 10.8  下载: 导出CSV
下载: 导出CSV
表 2 深度控制模糊规则表
Table 2. Depth control fuzzy rule
Upwm_dutyEc PL PM PS Z NS NM NL
ENL Z NS NM NM NM NL NL NM PS Z NS NM NM NM NL NS PM PS Z NS NM NM NM Z PM PM PS Z NS NM NM PS PM PM PM PS Z NS NM PM PL PM PM PM PS Z NS PL PL PL PM PM PM PS Z
下载: 导出CSV
-
[1] 叶梦佳, 王宇轩, 王赟, 等. AUV平面直线航迹跟踪控制算法[J]. 浙江大学学报(工学版), 2022, 56(11): 2127-2134. doi: 10.3785/j.issn.1008-973X.2022.11.003 [2] PENG Z, WANG J, HAN Q L. Path-following control of autonomous underwater vehicles subject to velocity and input constraints via neurodynamic optimization[J]. Transactions on Industrial Electronics, 2019, 66(11): 8724-8732. doi: 10.1109/TIE.2018.2885726 [3] 李曾妮. 移动对接过程中的欠驱动AUV路径规划方法研究[D]. 杭州: 浙江大学, 2023. [4] 程相勤. 基于滑模理论的欠驱动UUV空间曲线路径跟随控制[D]. 哈尔滨: 哈尔滨工程大学, 2011. [5] 谢天奇, 李晔, 姜言清, 等. 欠驱动自主水下航行器移动式回收控制及视景仿真[J]. 哈尔滨工程大学学报, 2023, 44(9): 1501-1509. doi: 10.11990/jheu.202112022 [6] 刘承蔚. 欠驱动UUV有限时间路径跟踪控制方法研究[D]. 大连: 大连海事大学, 2023. [7] WANG Z, WANG Y, JIANG S, et al. Three-dimensional trajectory tracking control of an underactuated AUV[C]// 2017 29th Chinese Control and Decision Conference. Chongqing, China: IEEE, 2017: 525-530. [8] Guo Q, Li Y, Liu H, et al. An underactuated AUV tracking algorithm based on backstepping adaptive sliding mode control[C]//2020 Chinese Automation Congress. Shanghai, China: IEEE, 2020: 3765-3770. [9] NOGUCHI Y, MAKI T. Tracking omnidirectional surfaces using a low-cost autonomous underwater vehicle[J]. Journal of Oceanic Engineering, 2021, 46(1): 11-23. doi: 10.1109/JOE.2020.2972046 [10] HESHMATI-ALAMDARI S, NIKOU A, DIMAROGONAS D V. Robust trajectory tracking control for underactuated autonomous underwater vehicles in uncertain environments[J]. Transactions on Automation Science and Engineering, 2021, 18(3): 1288-1301. doi: 10.1109/TASE.2020.3001183 [11] SONG Y S, ARSHAD M R. Tracking control design for autonomous underwater vehicle using robust filter approach[C]//2016 IEEE/OES Autonomous Underwater Vehicles. Tokyo, Japan: IEEE, 2016: 374-380. [12] KIM Y S, LEE J, PARK S K, et al. Path tracking control for underactuated AUVs based on resolved motion acceleration control[C]//2009 4th International Conference on Autonomous Robots and Agents. Wellington, New Zealand: IEEE, 2009: 342-346. [13] 武建国, 任志刚, 吕日恒. 模块化自主水下机器人开发与应用[J]. 海洋信息技术与应用, 2022, 37(1): 10-20. doi: 10.3969/j.issn.1005-1724.2022.01.002 [14] 崔峰, 林平. 基于模块化AUV的控制系统研究[J]. 机电工程技术, 2019, 48(2): 67-68. [15] TAYLOR M, WILBY A. Design considerations and operational advantages of a modular AUV with synthetic aperture sonar[C]//Oceans’11 MTS/IEEE KONA. Waikoloa, USA: IEEE, 2011: 1-6. [16] 刘隽, 文永鹏, 孙翔, 等. AUV模块化对于操纵性的影响分析[J]. 舰船科学技术, 2023, 45(10): 78-84. doi: 10.3404/j.issn.1672-7649.2023.10.016 [17] 王晓伟. 欠驱动AUV运动控制和路径规划研究[D]. 哈尔滨: 哈尔滨工程大学, 2022. [18] 卢有旺, 夏英凯, 徐国华, 等. 面向UUV对接的视觉引导三维轨迹跟踪控制研究[J]. 中国舰船研究, 2024, 19(1): 290-304. [19] YANG X, YAN J, HUA C, et al. Trajectory tracking control of autonomous underwater vehicle with unknown parameters and external disturbances[J]. Transactions on Systems, Man, and Cybernetics: Systems, 2021(51): 1054-1063. [20] NAG A, PATEL S S, AKBAR S A. Fuzzy logic based depth control of an autonomous underwater vehicle[C]//2013 International Mutli-Conference on Automation, Computing, Communication, Control and Compressed Sensing. Kottayam, India: IEEE, 2013: 117-123. [21] 李建朋. 水下机器人浮力调节系统及其深度控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2010. [22] 王伟. 微小型AUV浮力调节系统设计及定深控制研究[D]. 天津: 河北工业大学, 2018. [23] 李长龙, 刘伟, 周邵萍. 基于Mamdani模糊推理的槽罐车运输安全评价[J]. 华东理工大学学报(自然科学版), 2017, 43(4): 591-596.LI C L, LIU W, ZHOU S P. Transportation safety assessment of tank vehicle based on Mamdani fuzzy inference[J]. Journal of East China University of Science and Technology, 2017, 43(4): 591-596. [24] 蔡建银, 王志刚, 郭宇飞, 等. 基于RBF神经网络的四旋翼磨抛机器人力/位混合控制[J]. 武汉科技大学学报, 2023, 46(6): 465-471. [25] YE L, HONGDA G, HAO G, et al. The improved adaptive hybrid fuzzy control of AUV horizontal motion[C]//2016 13th International Computer Conference on Wavelet Active Media Technology and Information Processing. Chengdu, China: IEEE, 2016: 408-414. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 922
- HTML全文浏览量: 413
- PDF下载量: 172
- 被引次数: 0
图(24) / 表(2)




