Parameter Tuning Method of Active Disturbance Rejection Controller for AUVs Based on VRFT
-
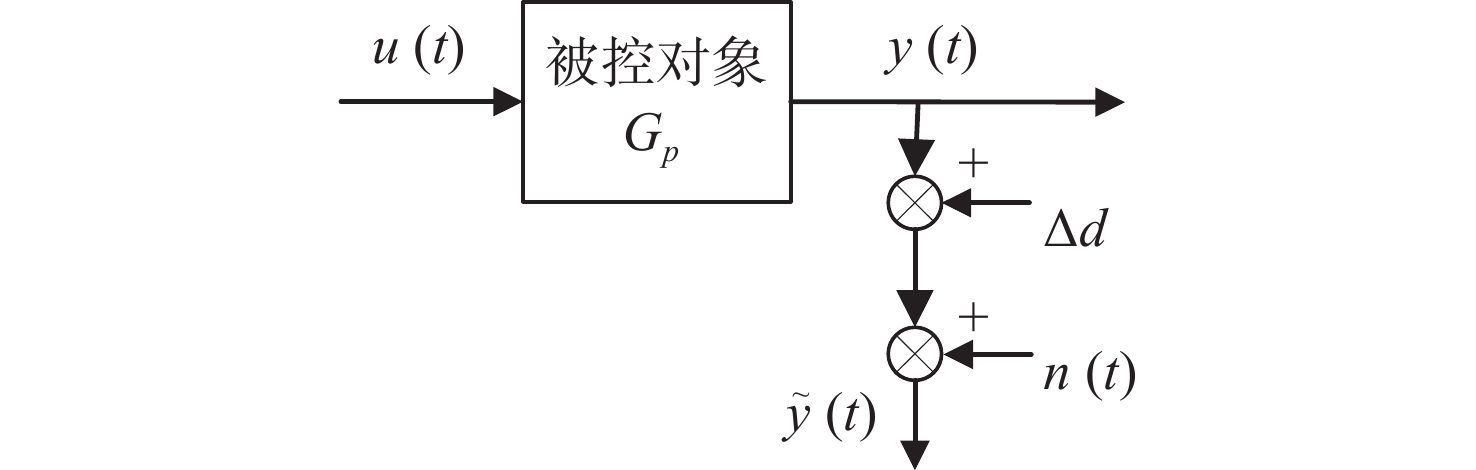
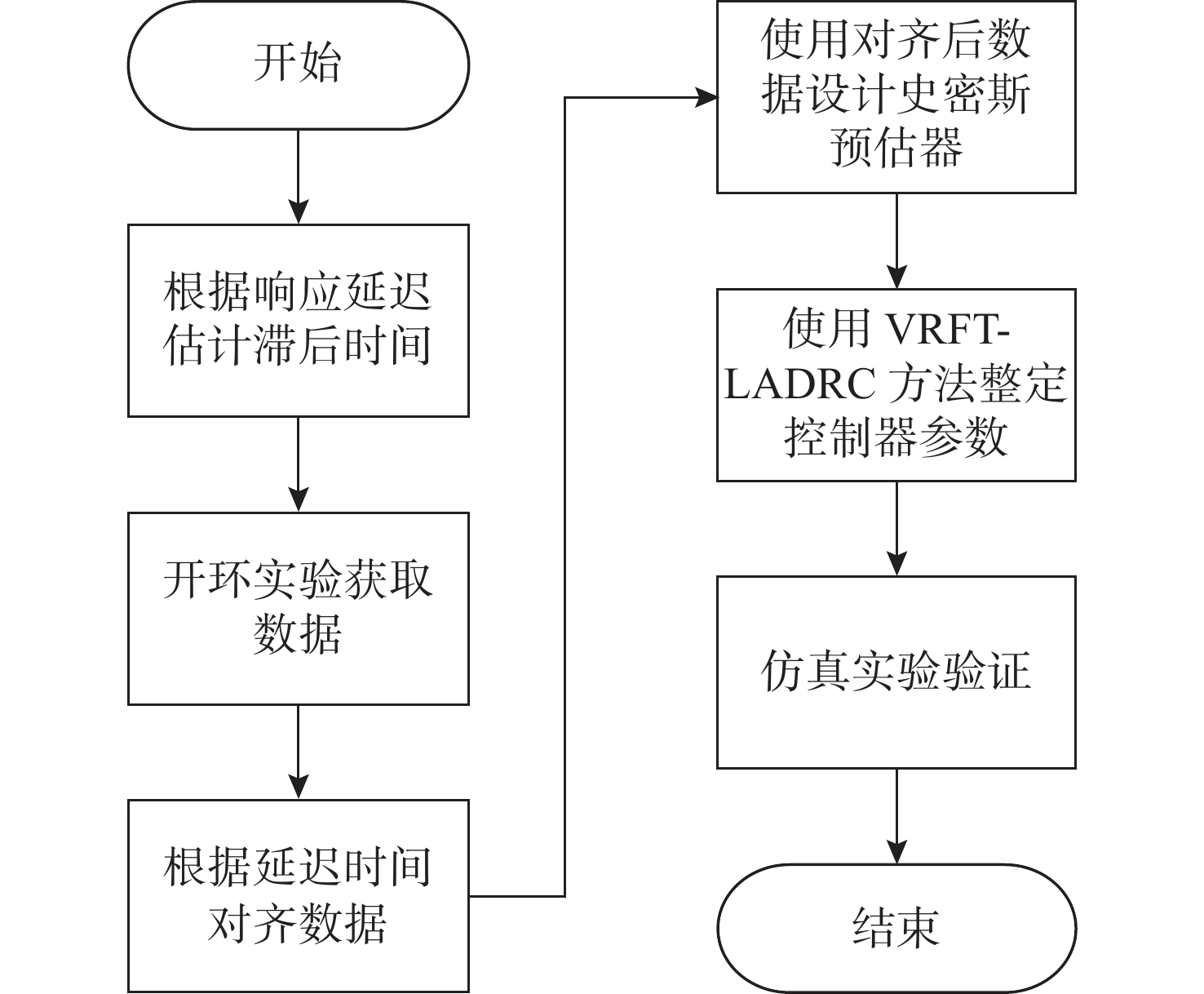
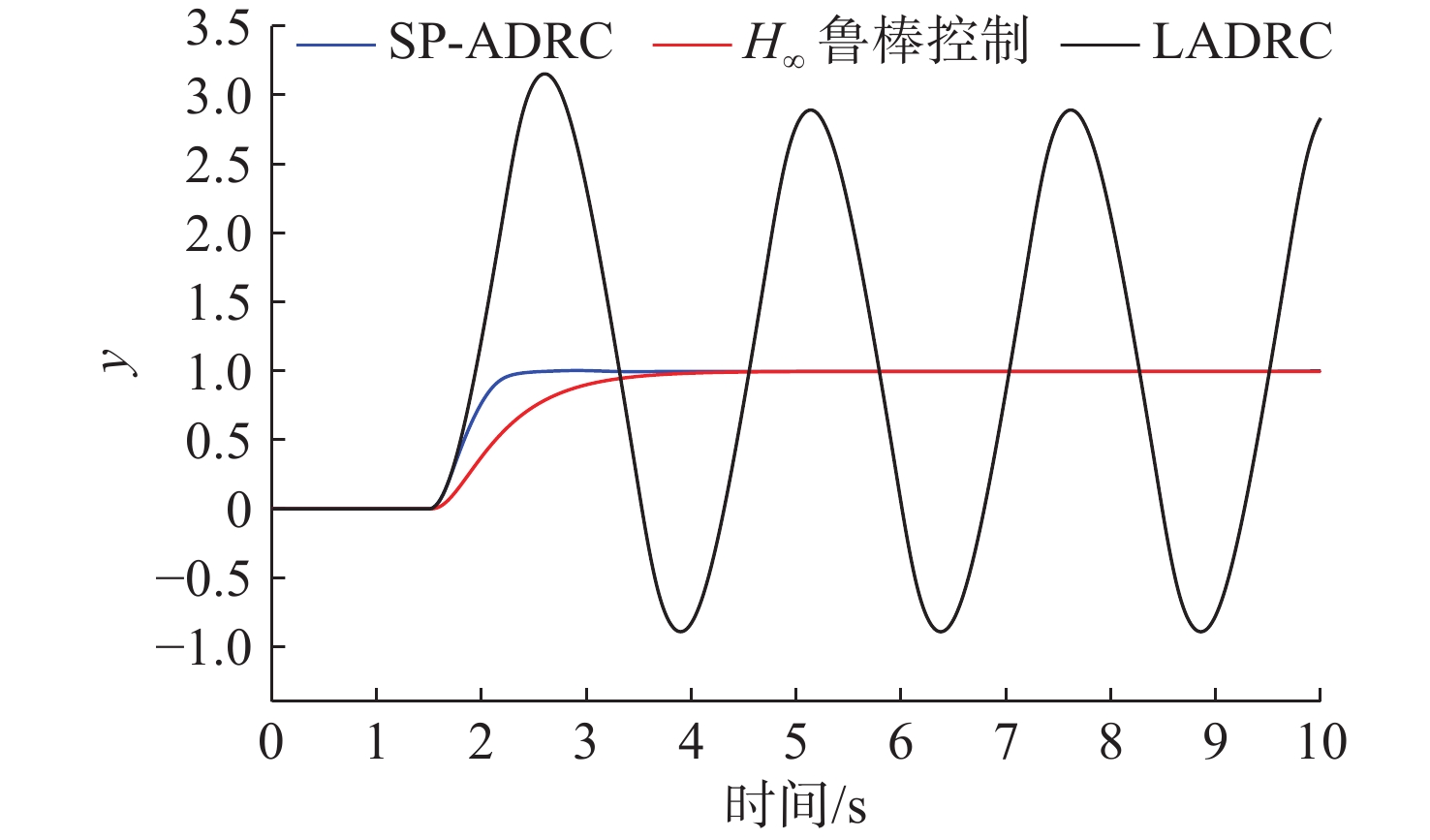
摘要: 自抗扰控制(ADRC)不依赖模型, 抗干扰能力强, 可以很好地解决自主水下航行器(AUV)模型不确定性和外部环境复杂的问题, 然而ADRC控制器的参数整定存在一定困难。针对该问题, 文中提出了一种基于虚拟参考反馈整定(VRFT)的ADRC控制器参数整定方法。首先针对AUV艏摇模型设计了ADRC控制器; 其次给出了VRFT-ADRC控制器参数整定方法; 最后针对角度传感器延迟问题给出了基于史密斯预估器的ADRC控制器设计方法。仿真证明, 该方法能够在模型信息未知的情况下, 仅通过开环实验的输入输出数据, 对AUV的ADRC控制器参数进行整定, 达到期望的控制效果。Abstract: Active disturbance rejection control(ADRC) is model-independent and exhibits strong robustness against disturbances, effectively addressing the uncertainties of autonomous undersea vehicle(AUV) models and complex external environments. However, parameter tuning for active disturbance rejection controllers presents certain difficulties. To tackle this issue, a parameter tuning method based on virtual reference feedback tuning(VRFT) was proposed. Initially, an active disturbance rejection controller was designed for the yaw model of the AUV. Subsequently, a parameter tuning method for VRFT-active disturbance rejection was presented. Finally, to address the issue of angular sensor delay, a design method for an active disturbance rejection controller based on the Smith predictor was proposed. The simulation results demonstrate that this method can tune the parameters of the active disturbance rejection controller for AUVs solely based on the open-loop experimental input and output data under the condition of unknown model information, achieving the desired control effect.
-
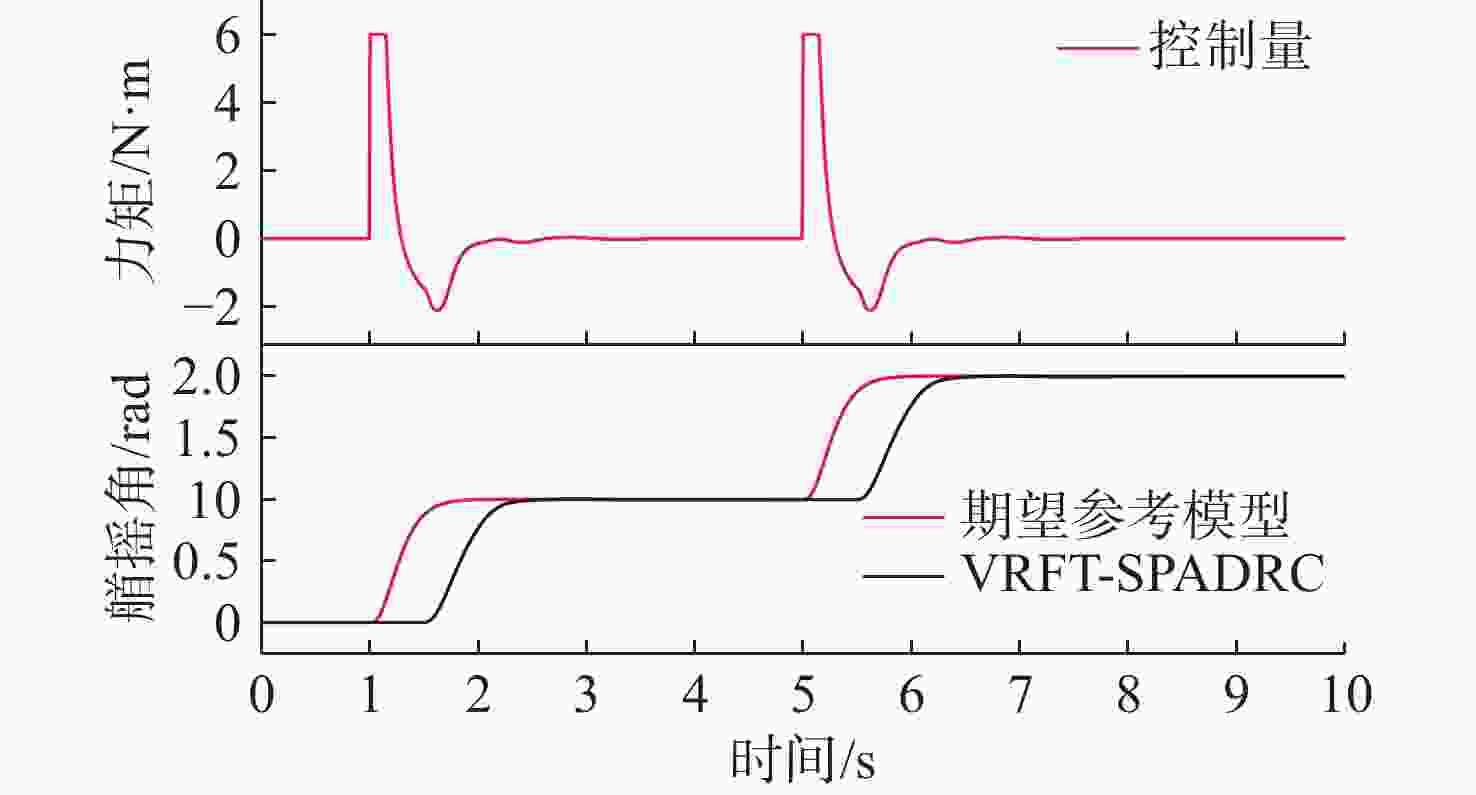
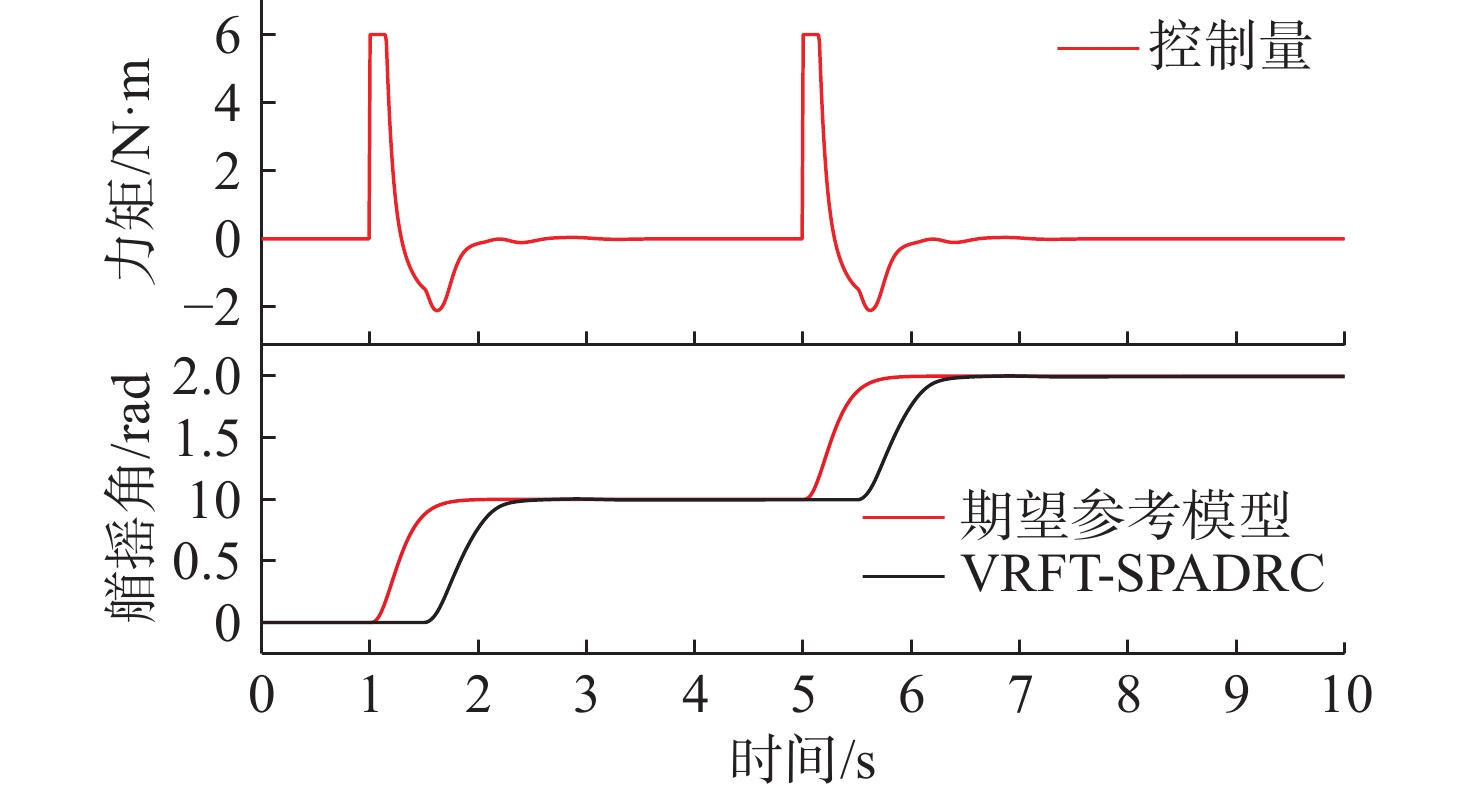
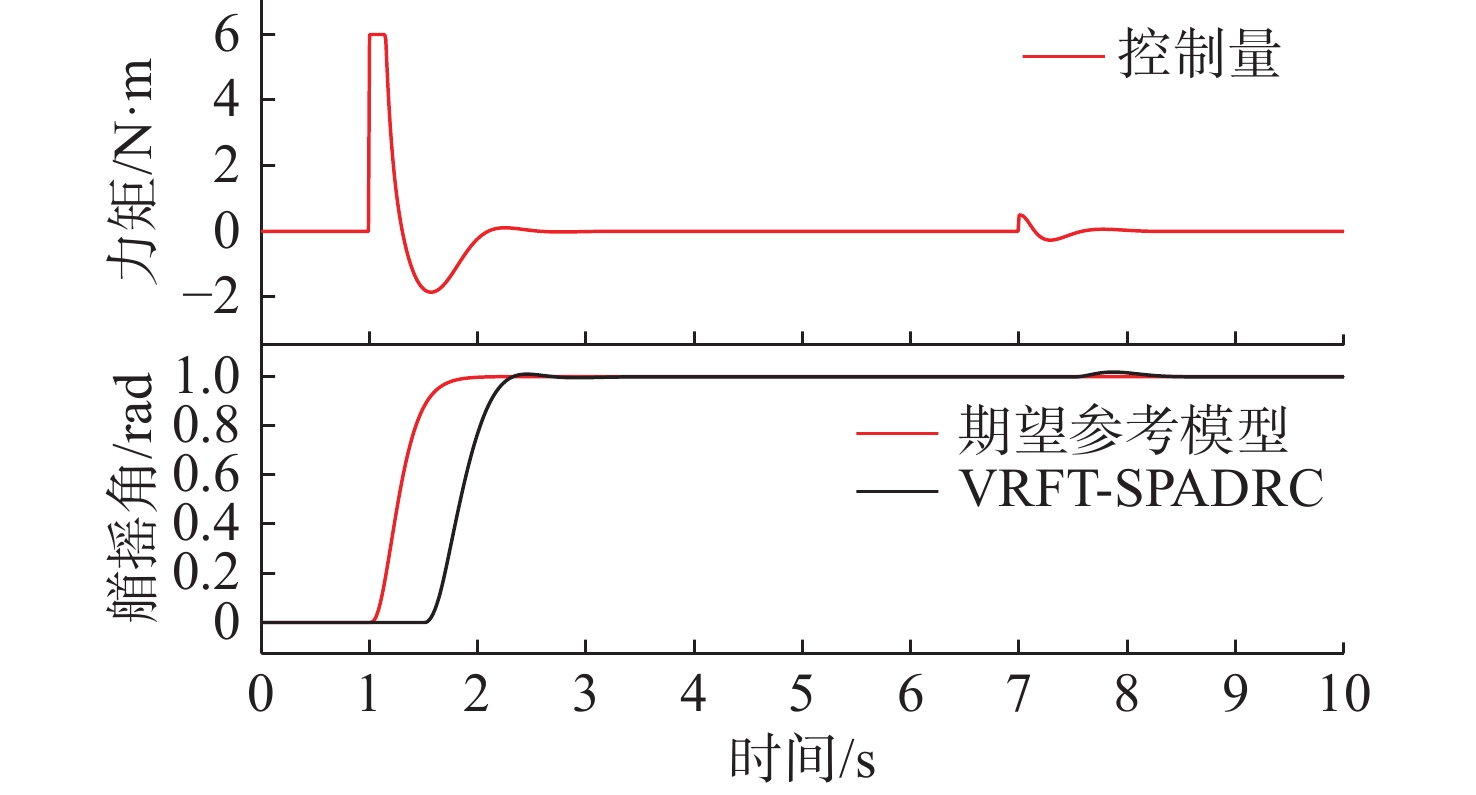
图 6 AUV艏摇模型阶跃响应与控制输出(SP-ADRC)
Figure 6. Step response and controller outputs of AUV yaw model (SP-ADRC)
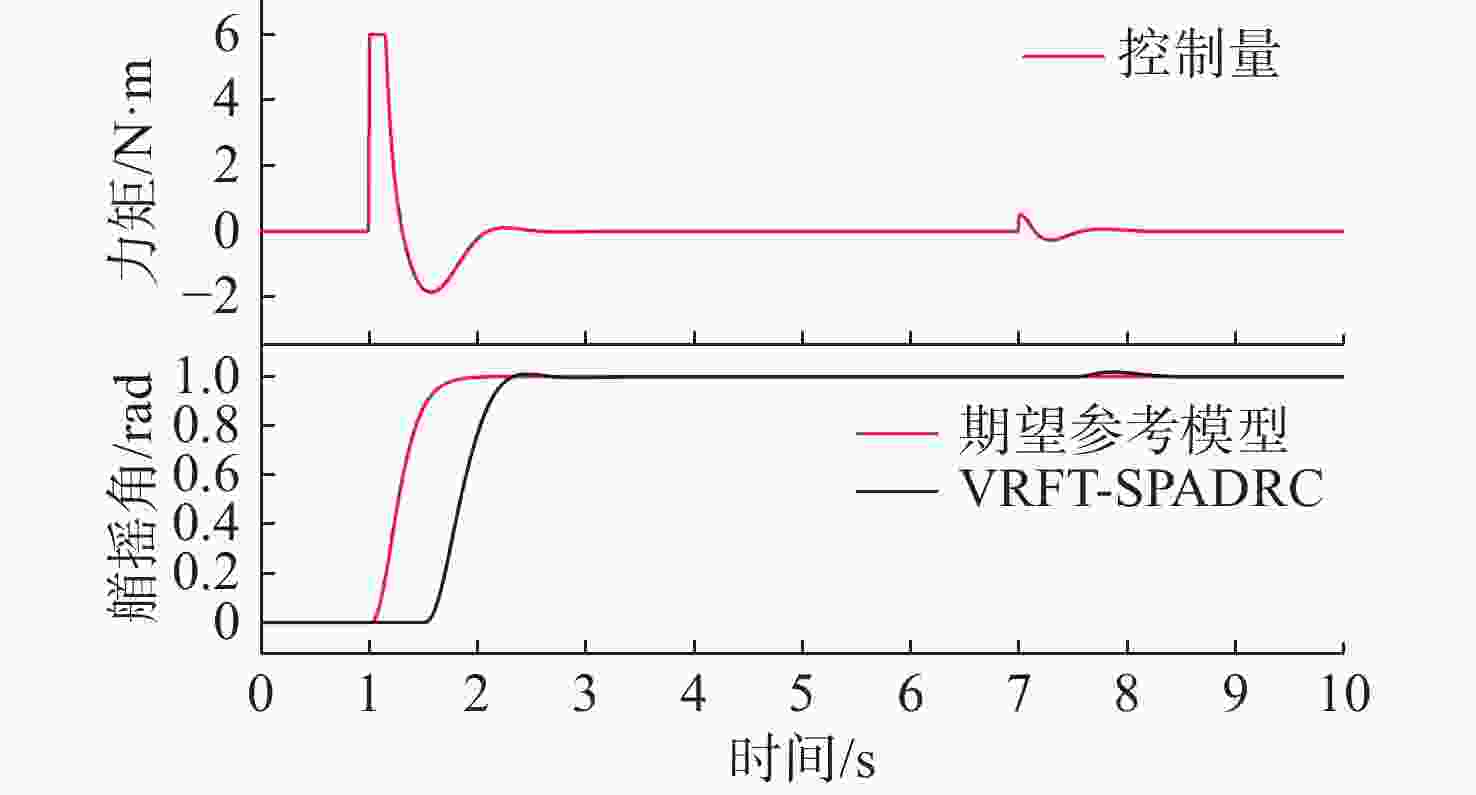
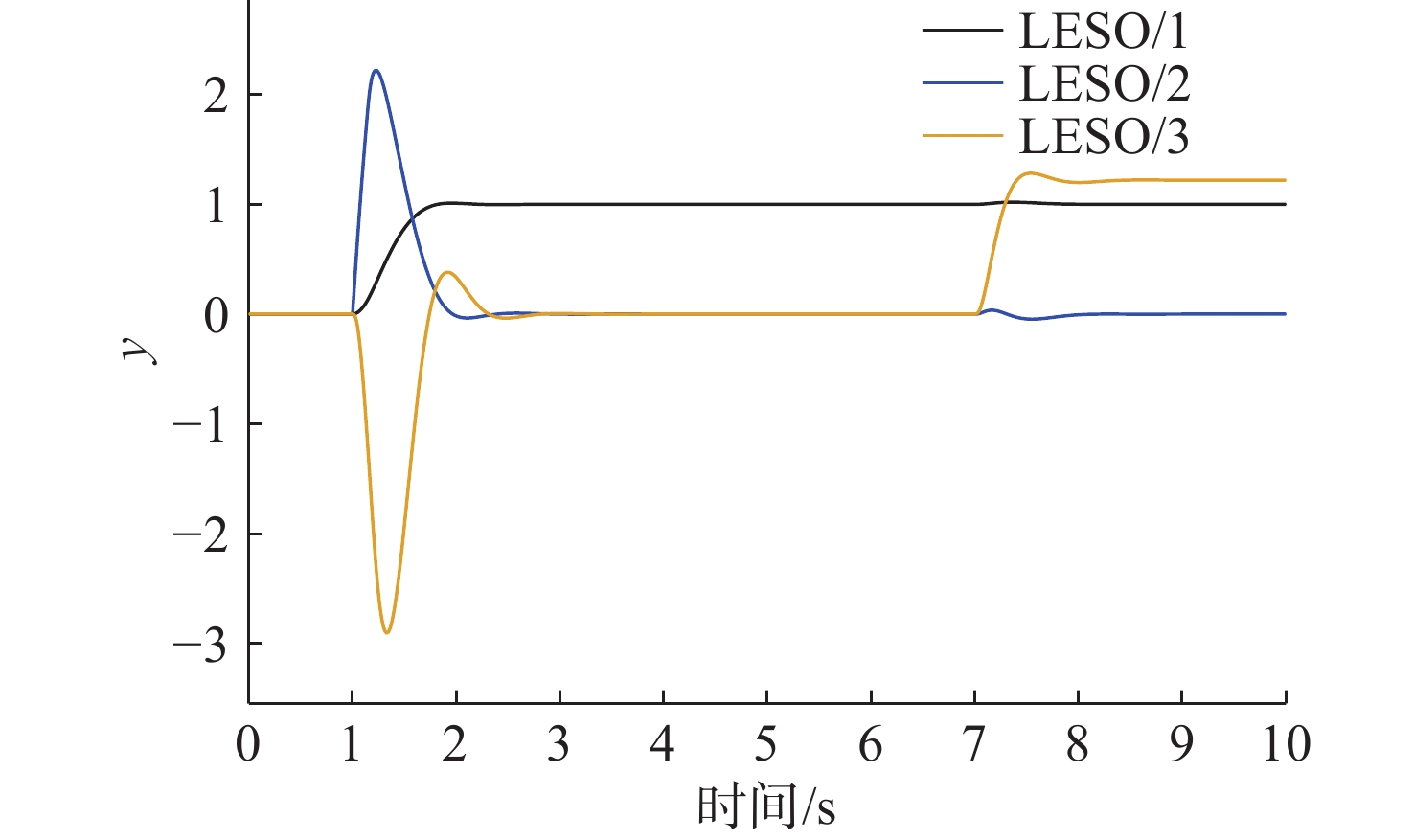
图 8 扰动作用下的阶跃响应与控制输出(SP-ADRC)
Figure 8. Step response and controller outputs under disturbances (SP-ADRC)

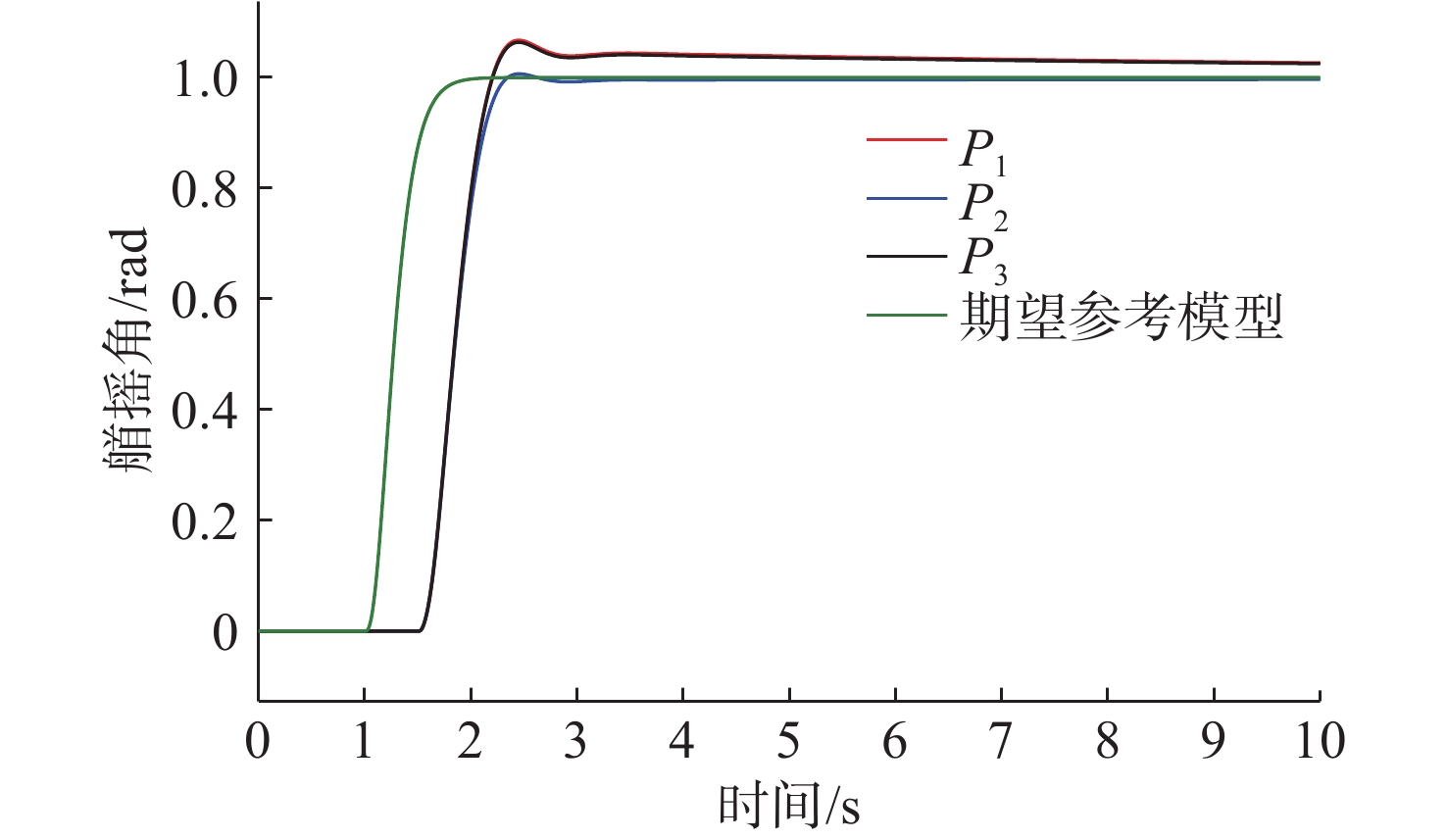
图 10 模型参数变化后的系统响应(SP-ADRC)
Figure 10. Response after model paraneters change (SP-ADRC)
表 1 艏摇模型变量定义与取值
Table 1. Definition and values of yaw
变量 定义 参数值 $ {I_{{Y\text{RB}}}}/({\text{kg}} \cdot {{\text{m}}^2}) $ 刚体转动惯量 $ {\text{0}}{\text{.357}}\;{\text{8}} $ $ {I_{{YA}}}/({\text{kg}} \cdot {{\text{m}}^2}) $ 附加转动惯量 $ {\text{0}}{\text{.138 0}} $ $ {D_{{YN}}} $ 标称非线性阻尼系数 0.249 6 $ {D_{{YL}}} $ 标称线性阻尼系数 0.021 0 $ {\dot x_r} $/($ {\text{rad/s}} $) 转动角速度 0~4 $ {\tau _i} $/$ \left({\text{N}} \cdot {\text{m}} \right)$ 推进器力矩输入 0~6  下载: 导出CSV
下载: 导出CSV
-
[1] 李娟, 王佳奇, 丁福光. 基于反馈线性化的AUV三维轨迹跟踪滑模控制[J]. 哈尔滨工程大学学报, 2022, 43(3): 348-355. doi: 10.11990/jheu.202101003 [2] DESAI R P, MANJAREKAR N S. Robust high gain observer based sliding mode controller for pitch and yaw position control of an AUV[J]. Advanced Control for Applications: Engineering and Industrial Systems, 2024, 6(1): e177. doi: 10.1002/adc2.177 [3] 刘艳, 冯旭琛, 杨睿, 等. 基于CISCREA AUV耦合模型的H∞鲁棒控制器设计[J]. 中国舰船研究, 2021, 16(6): 191-200.LIU Y, FENG X C, YANG R, et al. H∞ robust control design for coupled Ciscrea AUV model[J]. Chinese Journal of Ship Research, 2021, 16(6): 191-200. [4] 王景楠, 薛晨阳, 齐向东, 等. 基于SSA-模糊PID的AUV姿态控制研究[J]. 计算机测量与控制, 2024, 32(5): 144-150. [5] 王震, 王俊雄, 牛啸辰, 等. 基于改进型ADRC的全驱动AUV建模与仿真[J]. 水下无人系统学报, 2021, 29(1): 48-53.WANG Z, WANG J X, NIU X C, et al. Modeling and simulation of fully actuated AUV based on modified ADRC[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 48-53. [6] GAO Z. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the 2003 American Control Conference. Denver, USA: IEEE, 2003: 4989-4996. [7] CHEN X, LI D, GAO Z, et al. Tuning method for second-order active disturbance rejection control[C]//Proceedings of the 30th Chinese control conference. Yantai, China: IEEE, 2011: 6322-6327. [8] NOWAK P, CZECZOT J, KLOPOT T. Robust tuning of a first order reduced active disturbance rejection controller[J]. Control Engineering Practice, 2018, 74: 44-57. doi: 10.1016/j.conengprac.2018.02.001 [9] HOU G, GONG L, WANG M, et al. A novel linear active disturbance rejection controller for main steam temperature control based on the simultaneous heat transfer search[J]. ISA Transactions, 2022, 122: 357-370. doi: 10.1016/j.isatra.2021.05.003 [10] WANG Y, CHEN Z, SUN M, et al. Enhancing active disturbance rejection design via deep reinforcement learning and its application to autonomous vehicle[J]. Expert Systems with Applications, 2024, 239: 122433. doi: 10.1016/j.eswa.2023.122433 [11] CAMPI M C, LECCHINI A, SAVARESI S M. Virtual reference feedback tuning: A direct method for the design of feedback controllers[J]. Automatica, 2002, 38(8): 1337-1346. doi: 10.1016/S0005-1098(02)00032-8 [12] ROMAN R C, PRECUP R E, PETRIU E M, et al. First-order active disturbance rejection-virtual reference feedback tuning control of tower crane systems[C]//2020 24th International Conference on System Theory, Control and Computing. Sinaia, Romania: IEEE, 2020: 137-142. [13] ROMAN R C, PRECUP R E, PETRIU E M, et al. Second order active disturbance rejection control-virtual reference feedback tuning for twin rotor aerodynamic systems[C]//2020 IEEE International Conference on Systems, Man, and Cybernetics. Toronto, Canada: IEEE, 2020: 1693-1698. [14] 杨睿. 水下机器人建模与鲁棒控制研究[D]. 青岛: 中国海洋大学, 2016. [15] SELVI D, PIGA D, BATTISTELLI G, et al. Optimal direct data-driven control with stability guarantees[J]. European Journal of Control, 2021, 59: 175-187. doi: 10.1016/j.ejcon.2020.09.005 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 554
- HTML全文浏览量: 261
- PDF下载量: 90
- 被引次数: 0