

Modeling and Motion Control of Underwater Snake Robot
-
摘要: 针对水下蛇形机器人在复杂水下环境自主游动难问题, 设计了一种水下蛇形机器人机构。基于蛇类运动机理建立运动学模型, 提出一种基于模糊控制和中枢模式生成(CPG)的运动控制方法, 通过对单个Hopf振荡器模型中极限环的稳定性进行分析, 搭建由多个Hopf振荡器构建形成的具有双耦合链条网拓结构的CPG模型, 引入模糊控制器与CPG模型一起构成闭环控制网络。对水下蛇形机器人进行仿真和实验结果表明, 样机可实现直线蜿蜒运动、左右转弯运动和U型运动实验, 在3种运动模式中, 水下蛇形机器人不仅拥有良好的稳定性, 而且能够保持优越的灵活性与机动性。Abstract: To address the autonomous swimming difficulty of an underwater snake robot in a complex underwater environment, this study designed an underwater snake robot mechanism. A kinematic model was established based on the snake motion mechanism, and a motion control method based on fuzzy control and a central pattern generator(CPG) was proposed. The CPG model was constructed by several Hopf oscillators with double-coupled chain network structure after the stability analysis of the limit cycle in a single Hopf oscillator model, and a fuzzy controller and the CPG model were introduced to form a closed-loop control network. The simulation and experiment of an underwater snake robot were carried out. The prototype can complete the experiments of linear meandering movement, left and right turning movement, and U-shaped movement. The experimental results show that the underwater snake robot not only has good stability but also can maintain superior flexibility and maneuverability in the three motion modes.
-
Key words:
- underwater snake robot /
- fuzzy controller /
- central pattern generator /
- motion control
-
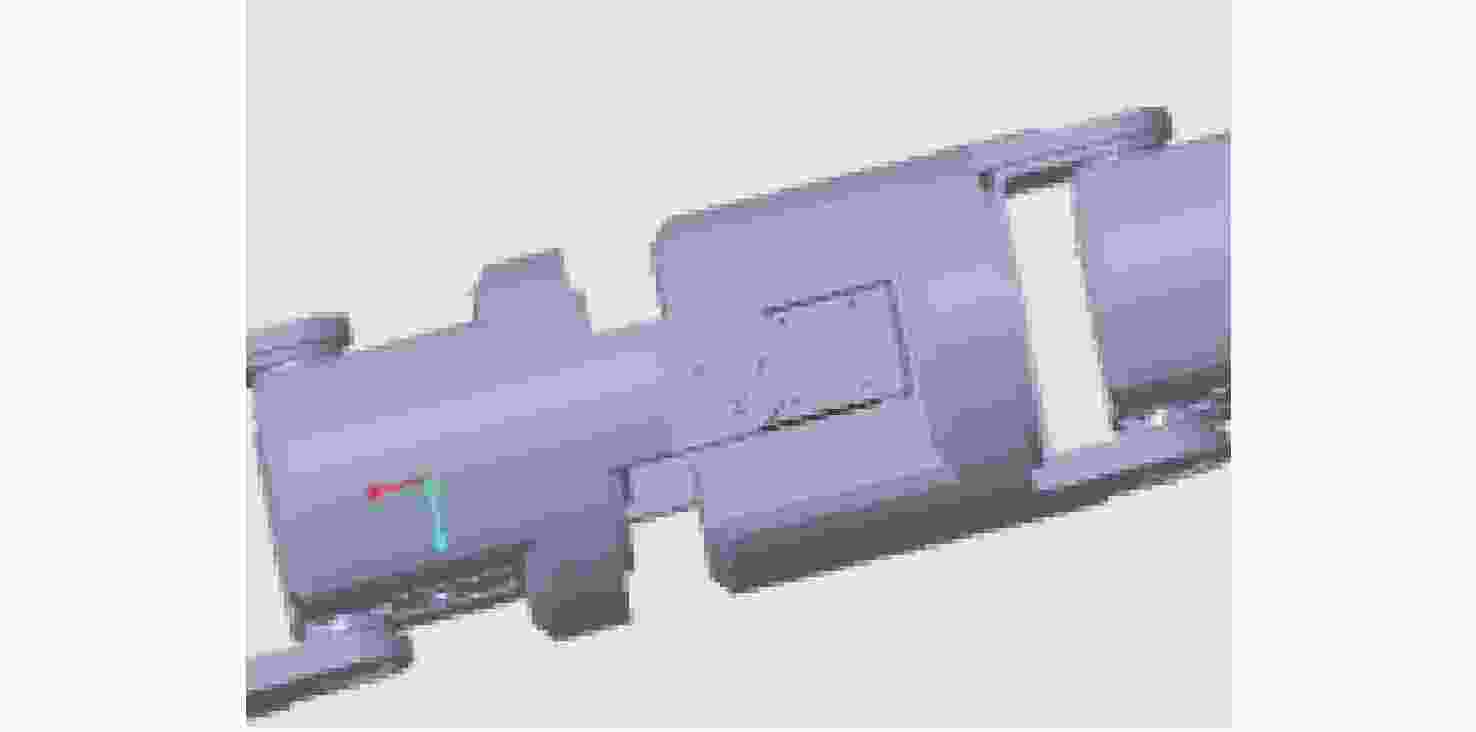
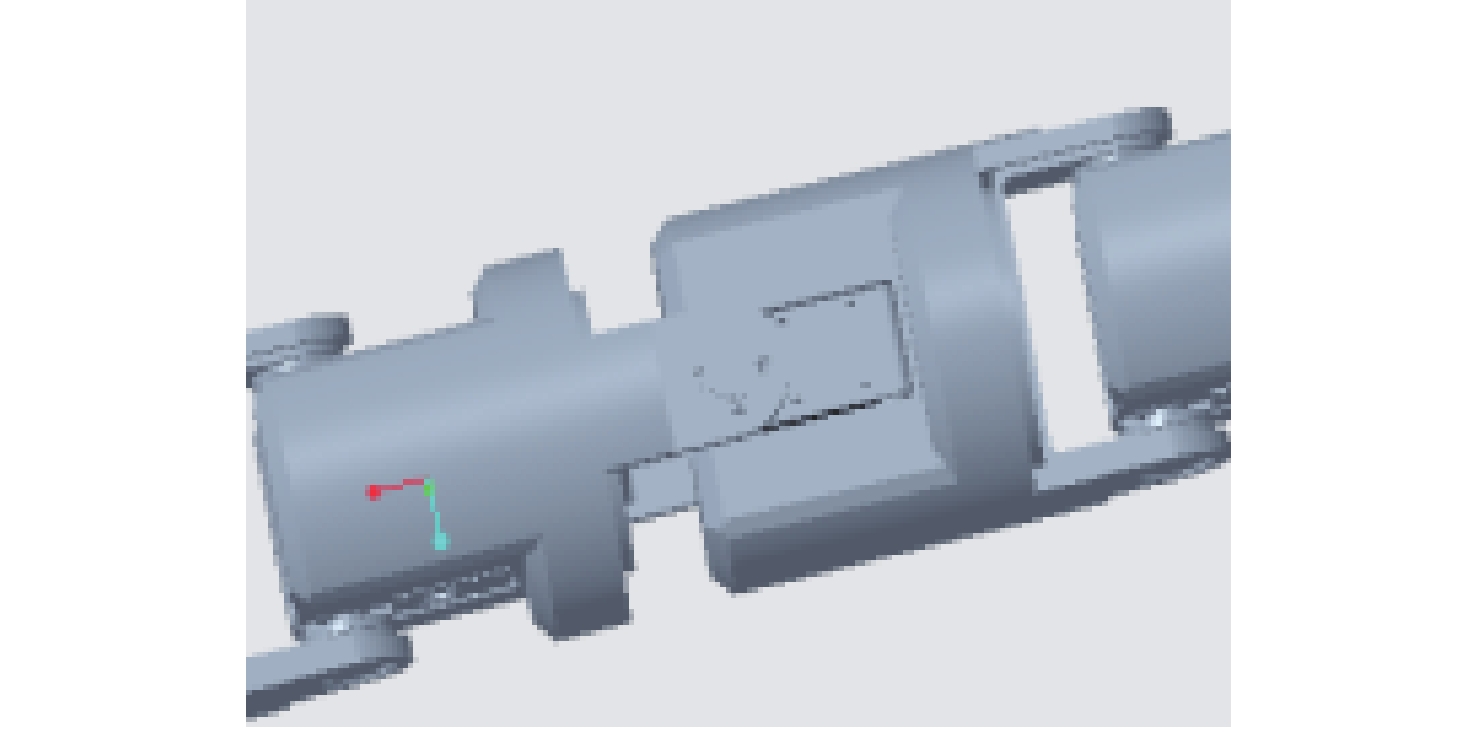
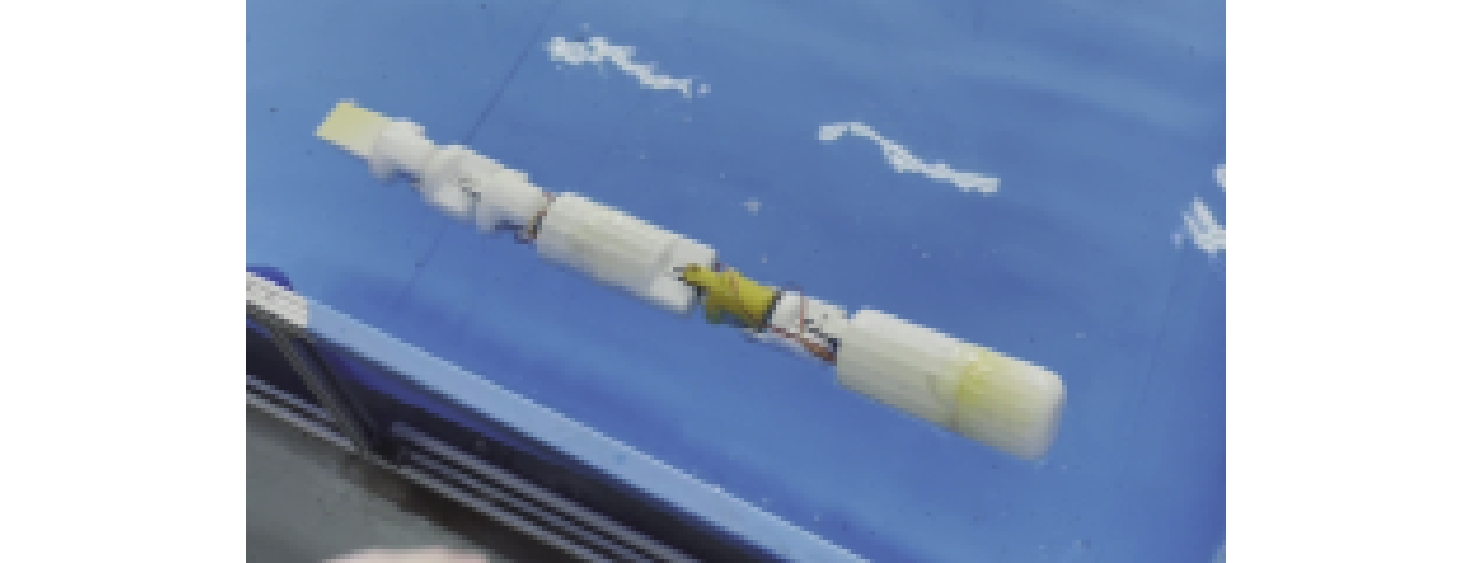
图 4 水下蛇形机器人单自由度模块关节
Figure 4. Single degree of freedom module joint of the underwater snake robot
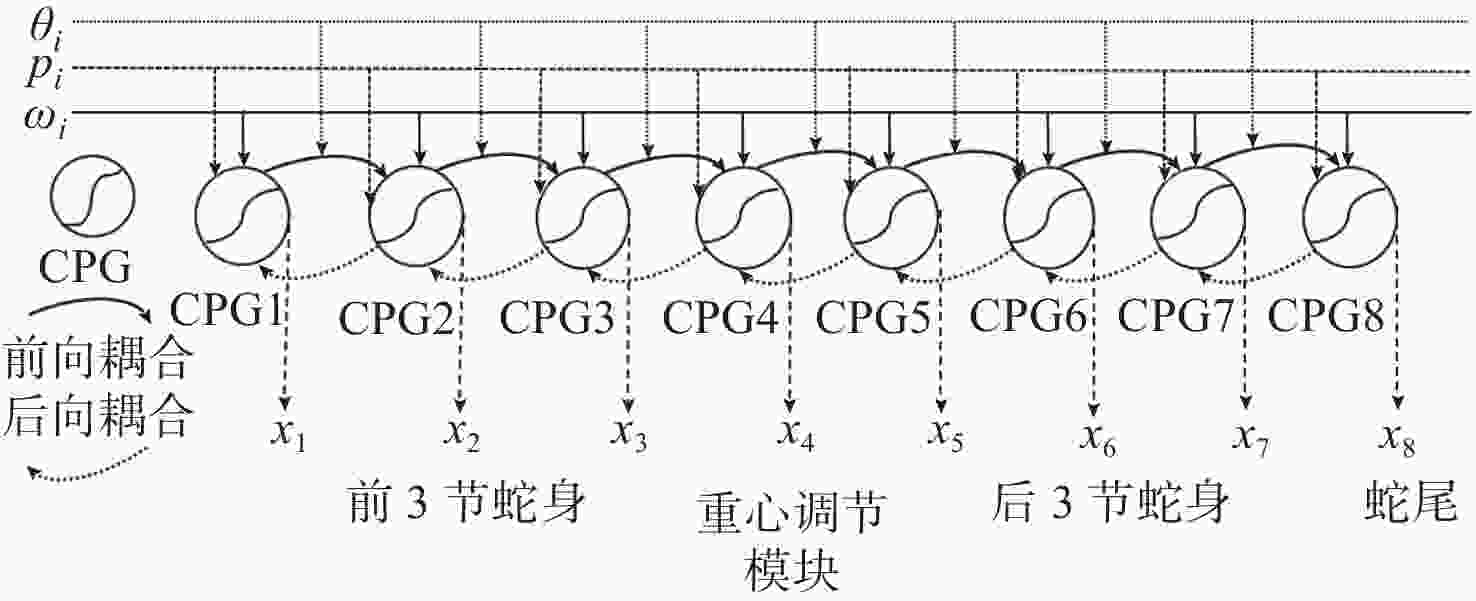
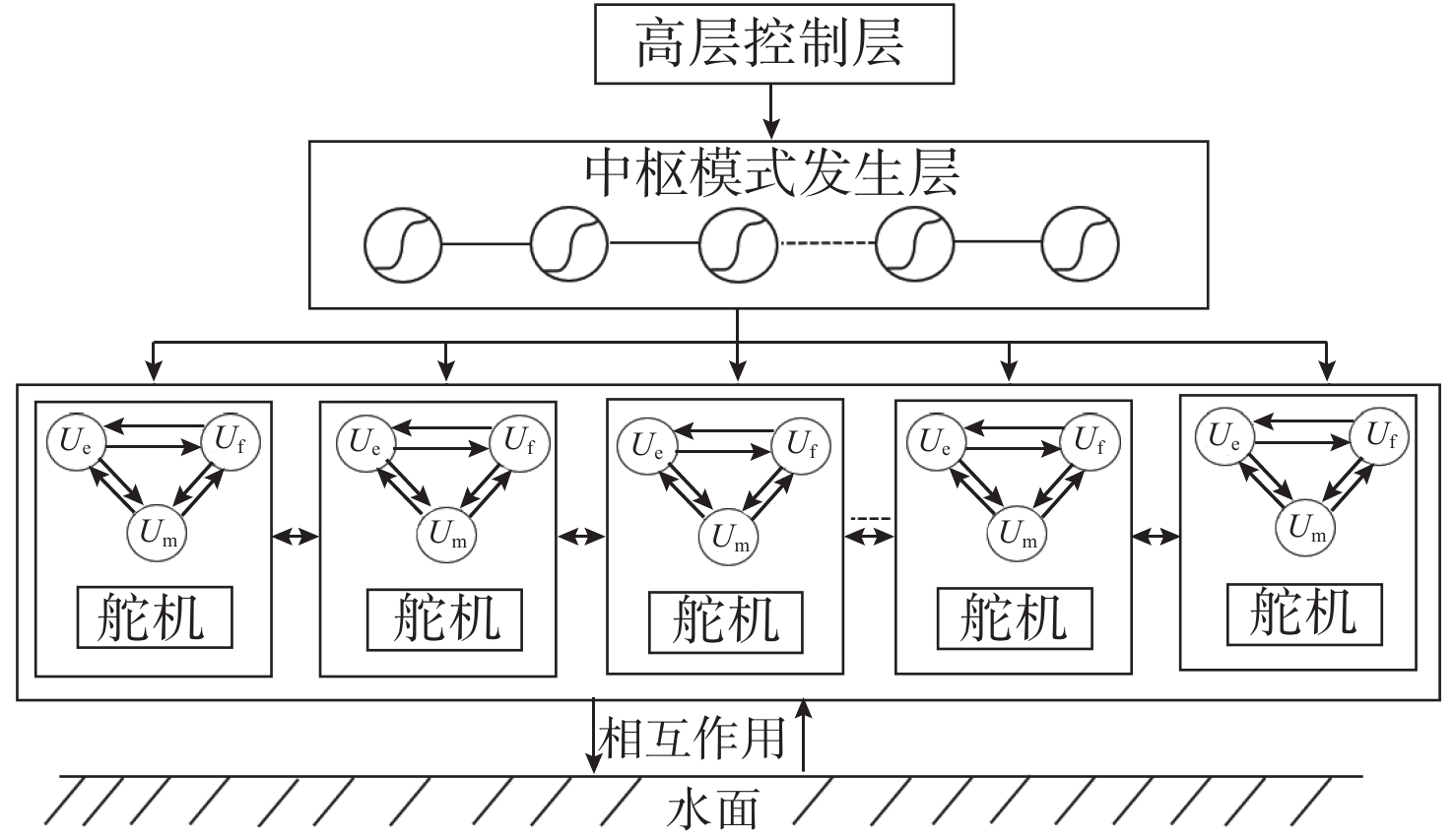
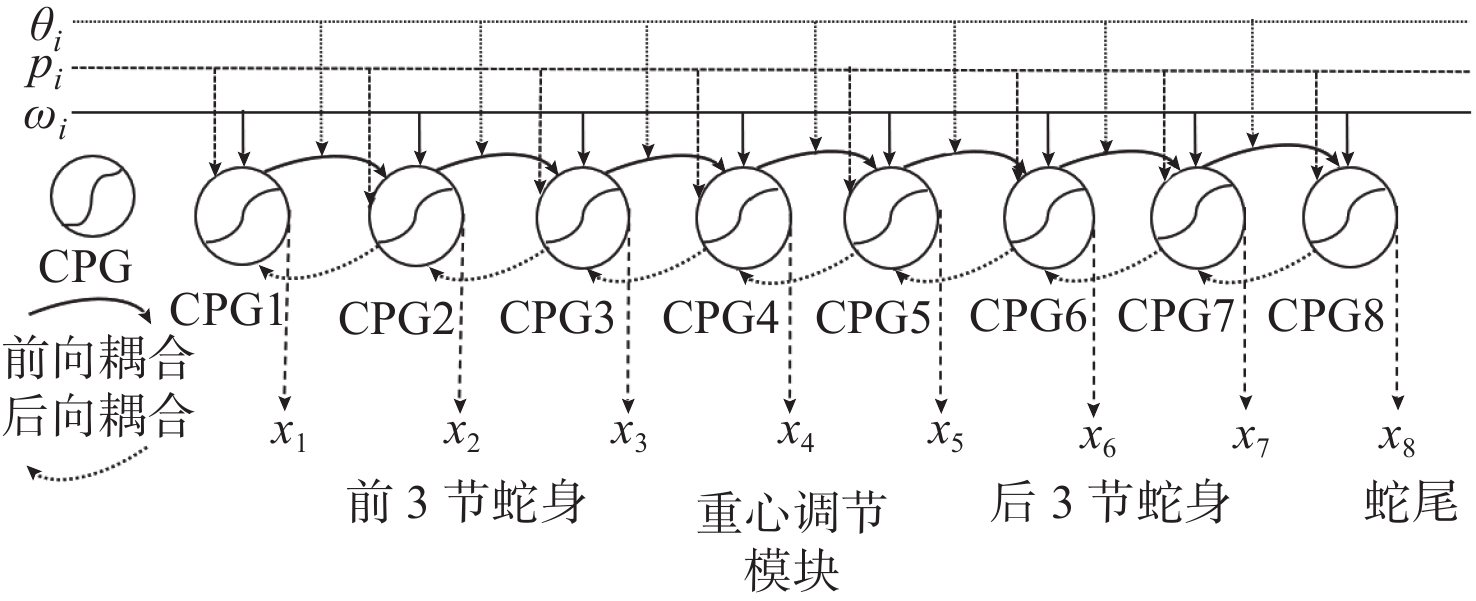
图 7 水下蛇形机器人CPG网络拓扑结构
Figure 7. CPG network topology structure of the underwater snake robot
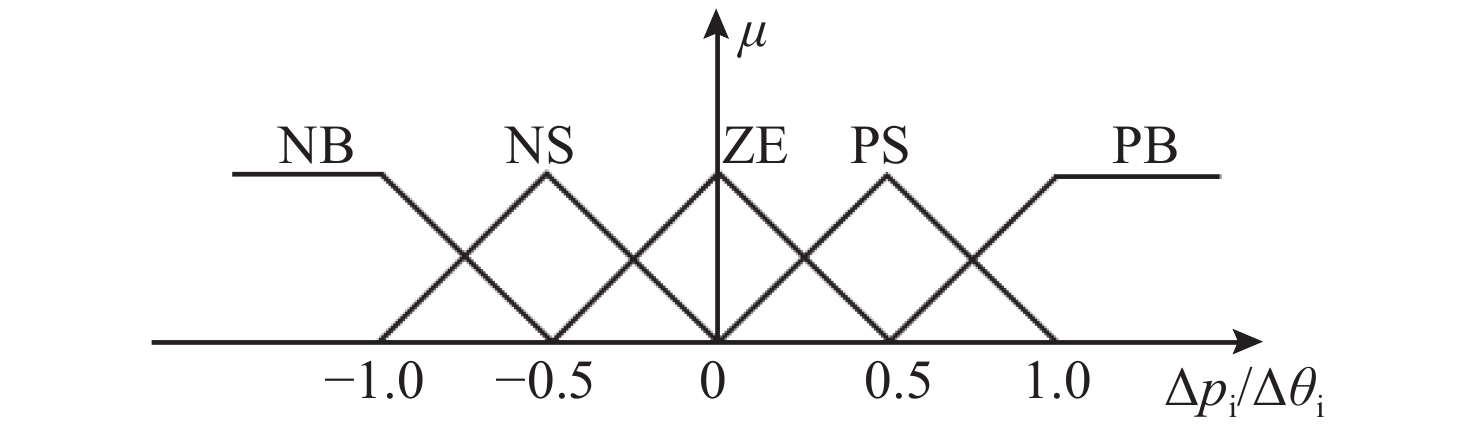
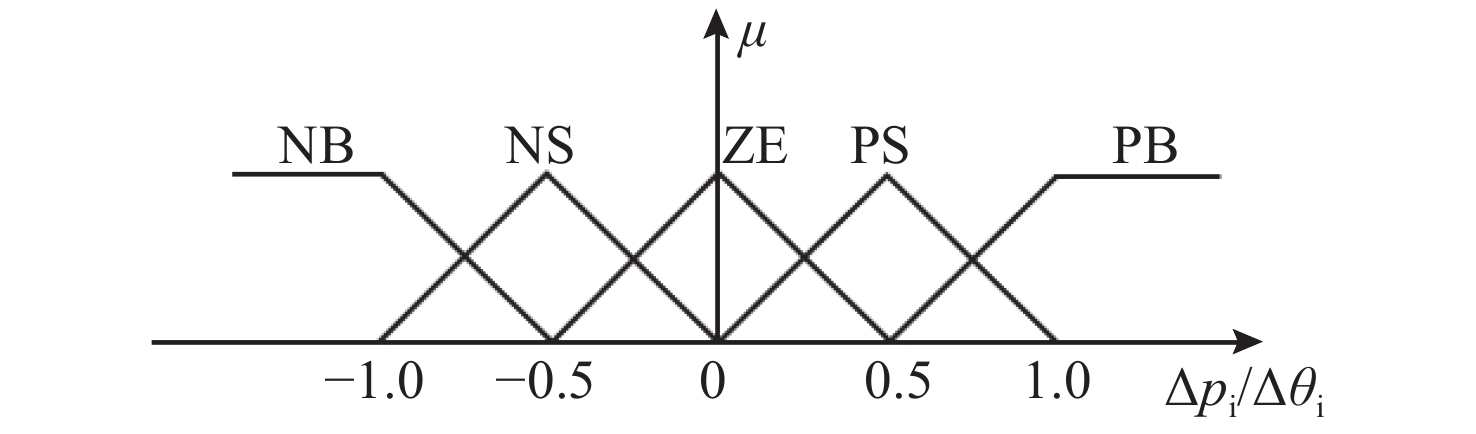
图 11
$ \Delta {p}_{i} $ /$ \Delta {\theta }_{i} $ -Z隶属函数Figure 11.
$ \Delta {p}_{i} $ /$ \Delta {\theta }_{i} $ -Z membership function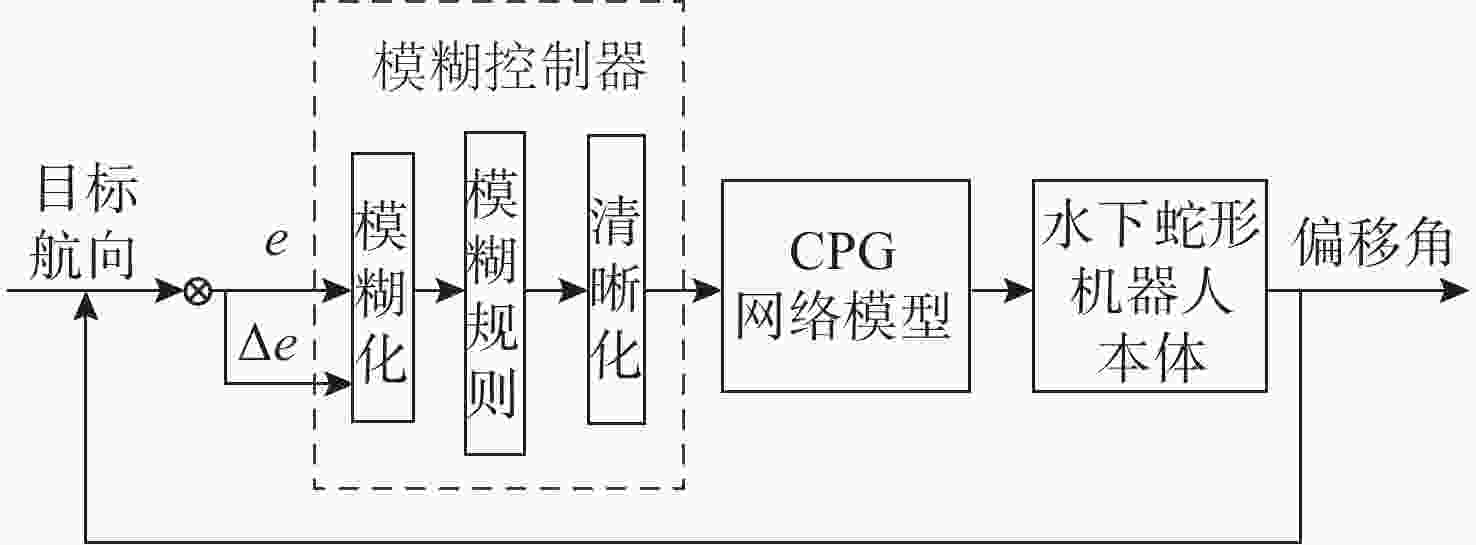
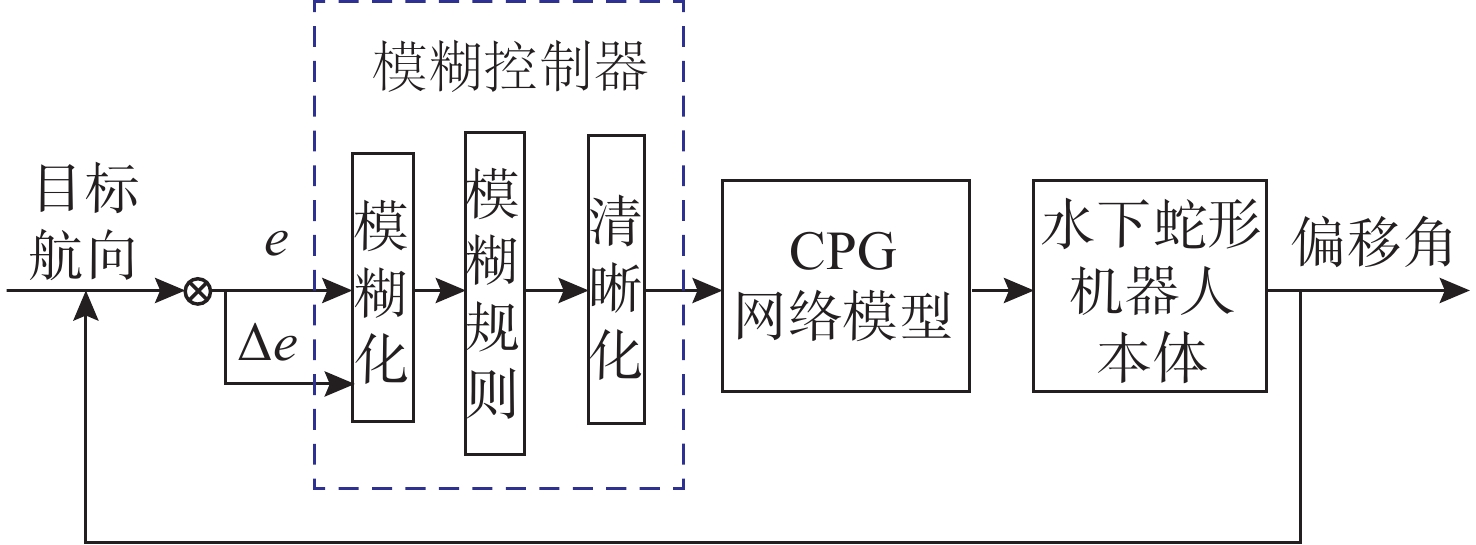
图 12 水下蛇形机器人模糊CPG控制器整体结构图
Figure 12. Overall structure diagram of the underwater snake robot fuzzy CPG controller
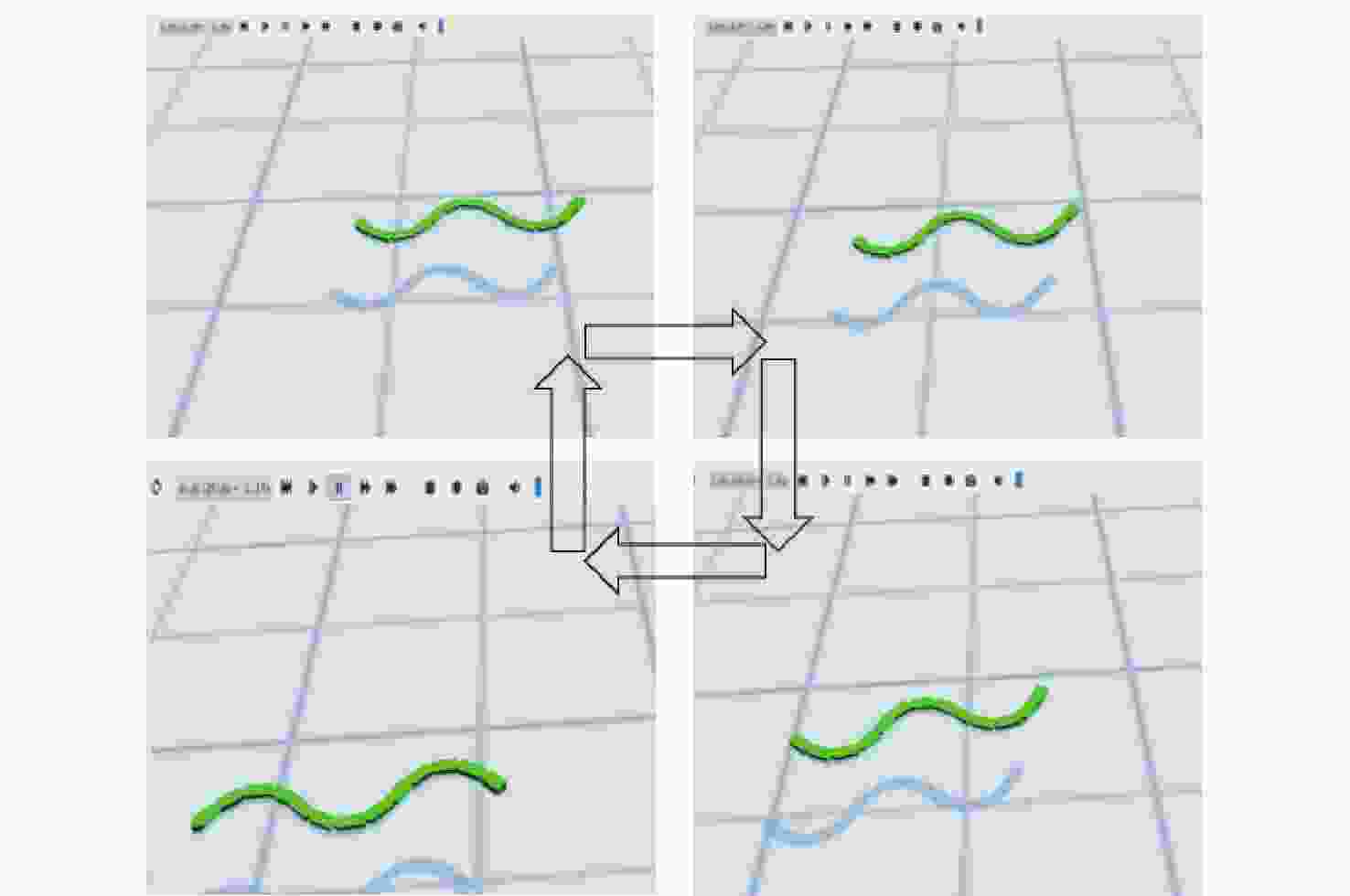
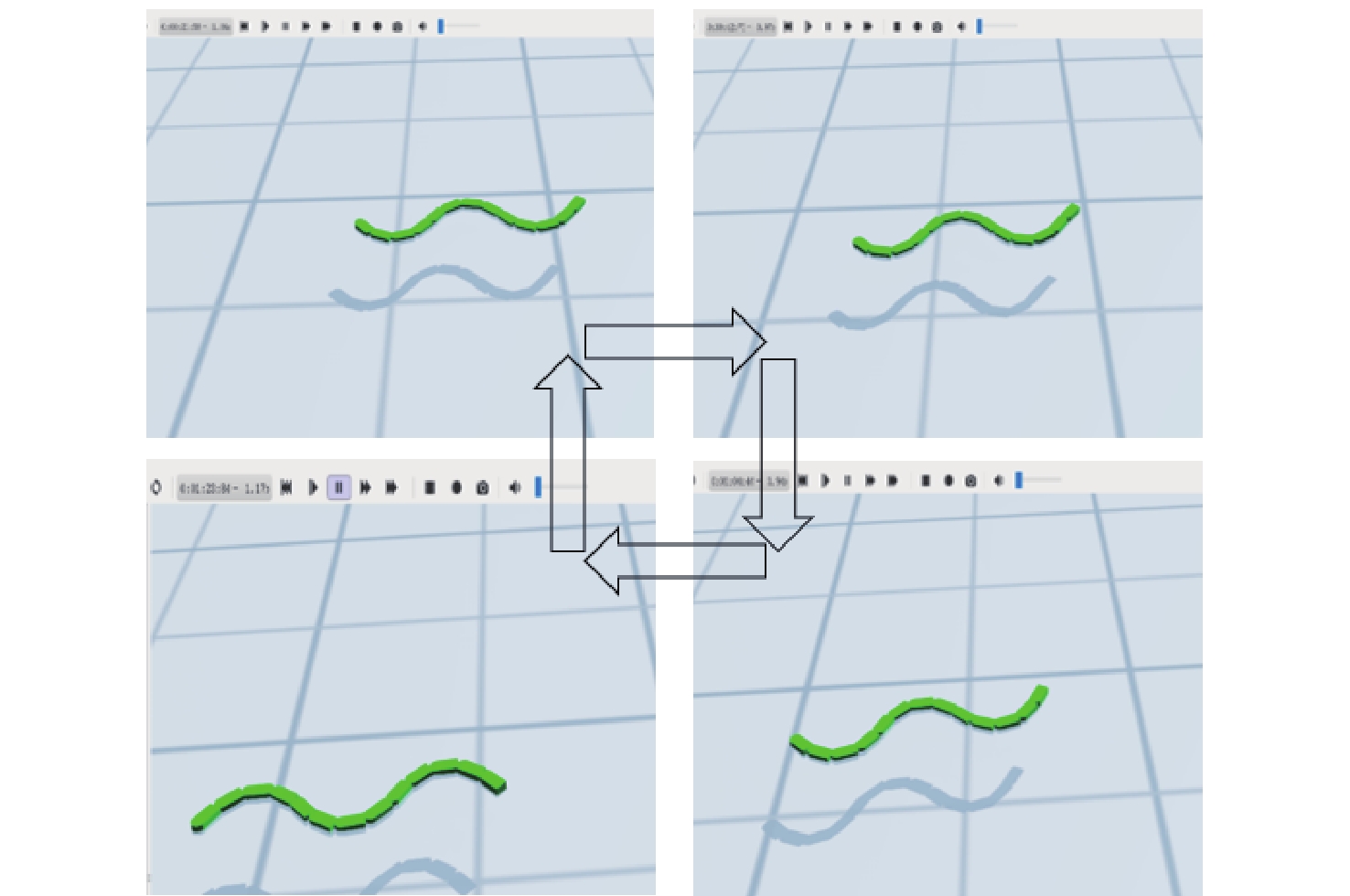
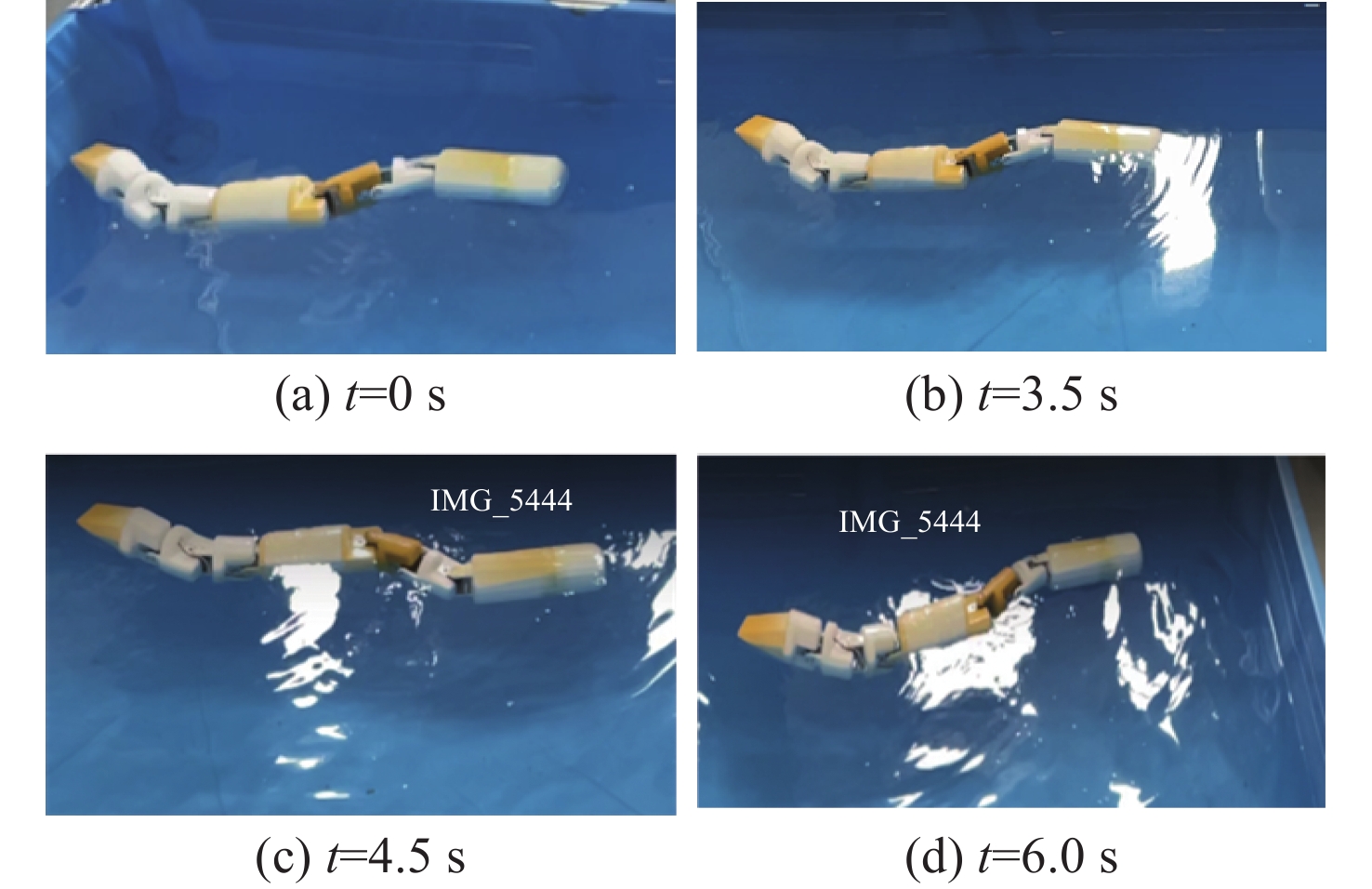
图 14 水下蛇形器人直线蜿蜒运动仿真实验
Figure 14. Simulation experiment of linear meandering motion of the underwater snake robot
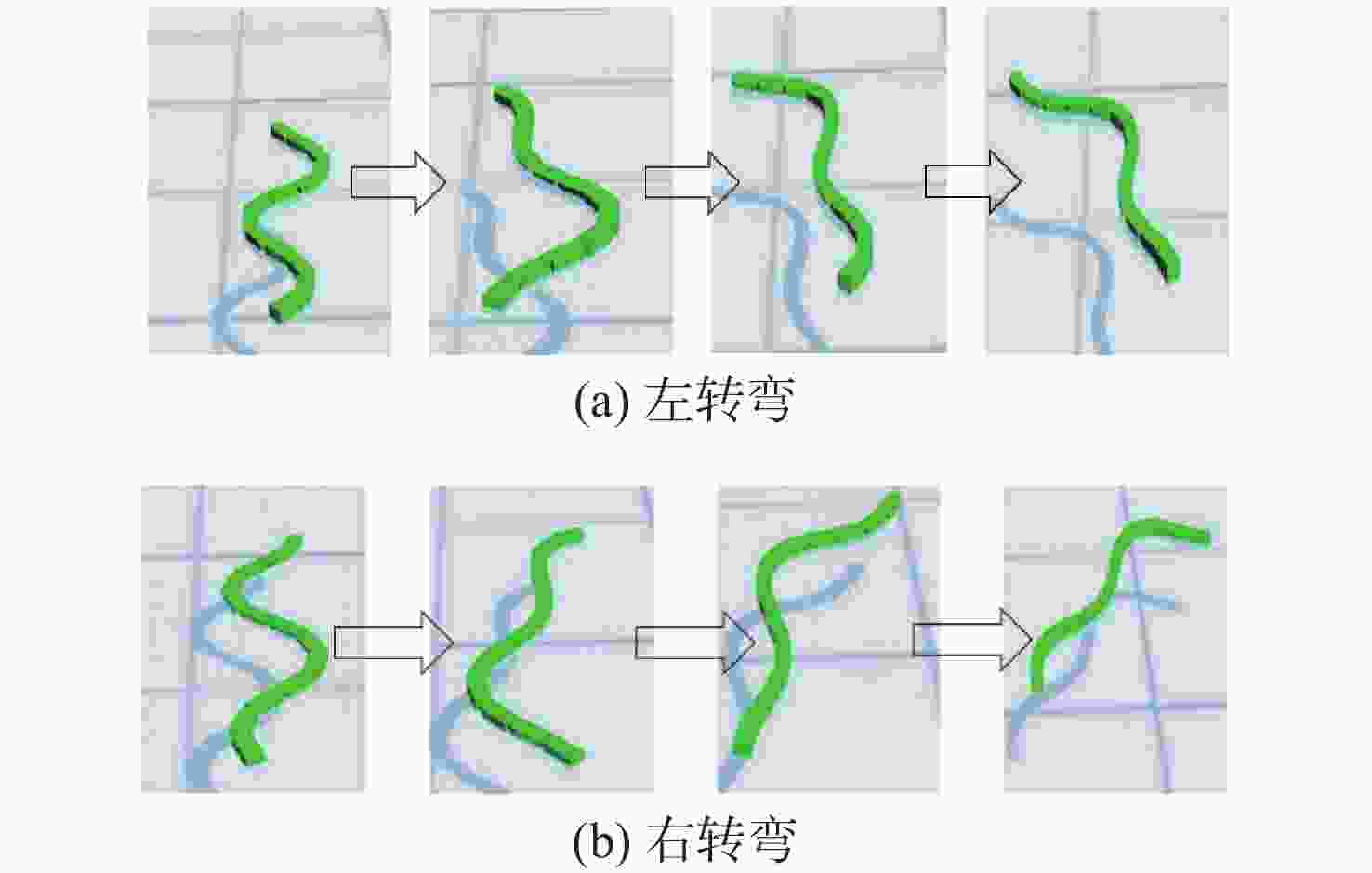
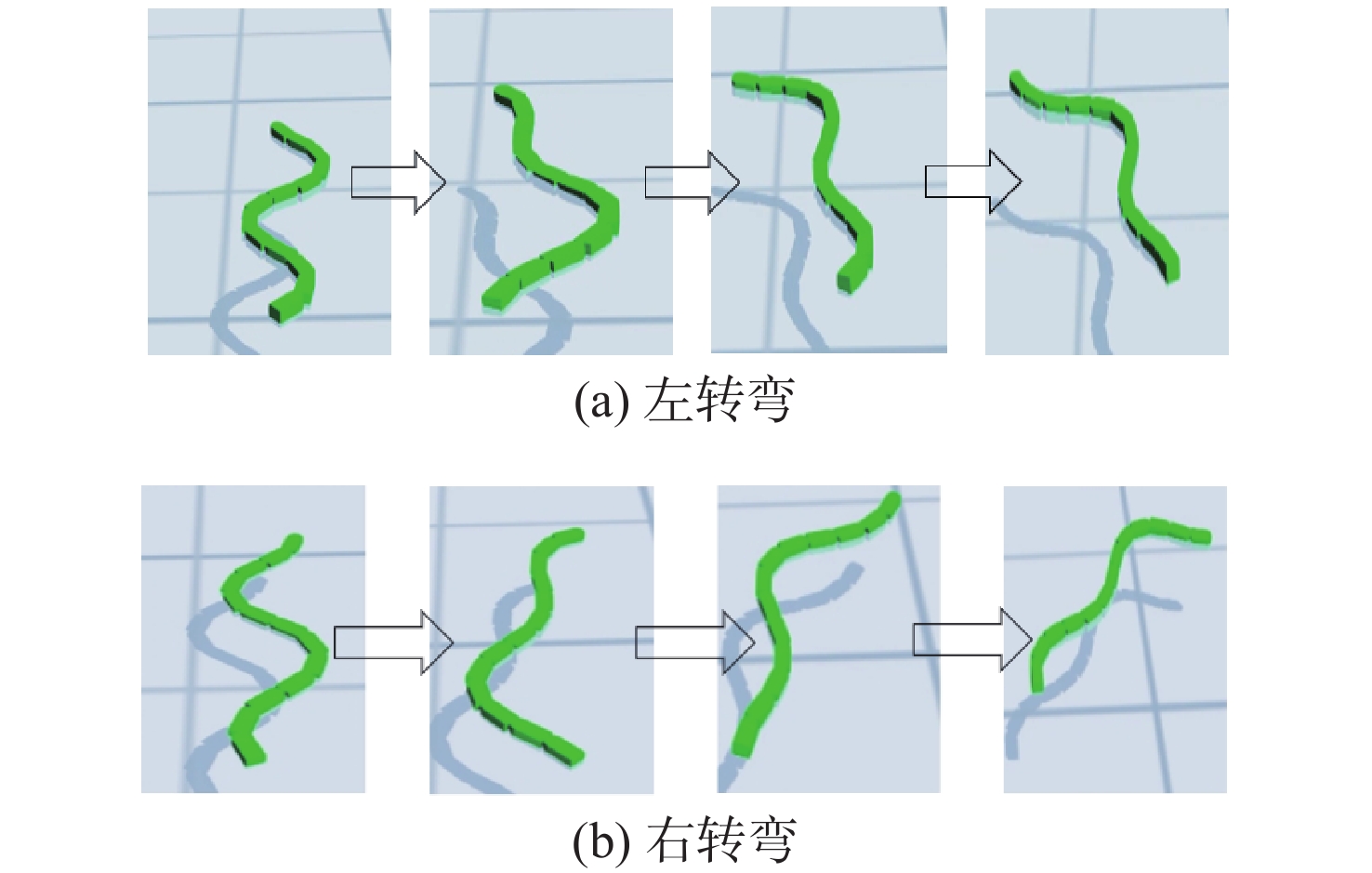
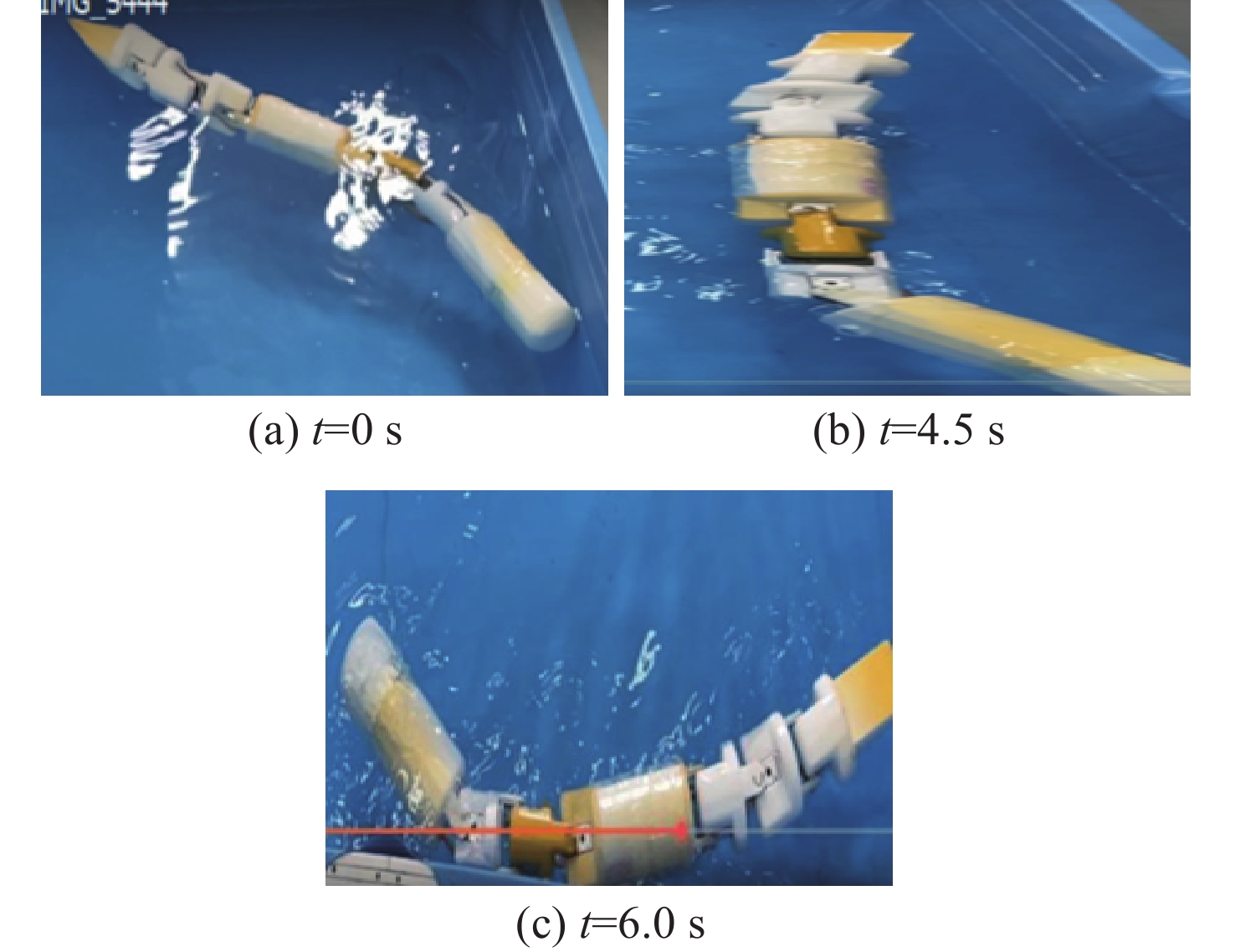
图 15 水下蛇形机器人转弯运动仿真实验
Figure 15. Simulation experiment of turning motion of the underwater snake robot

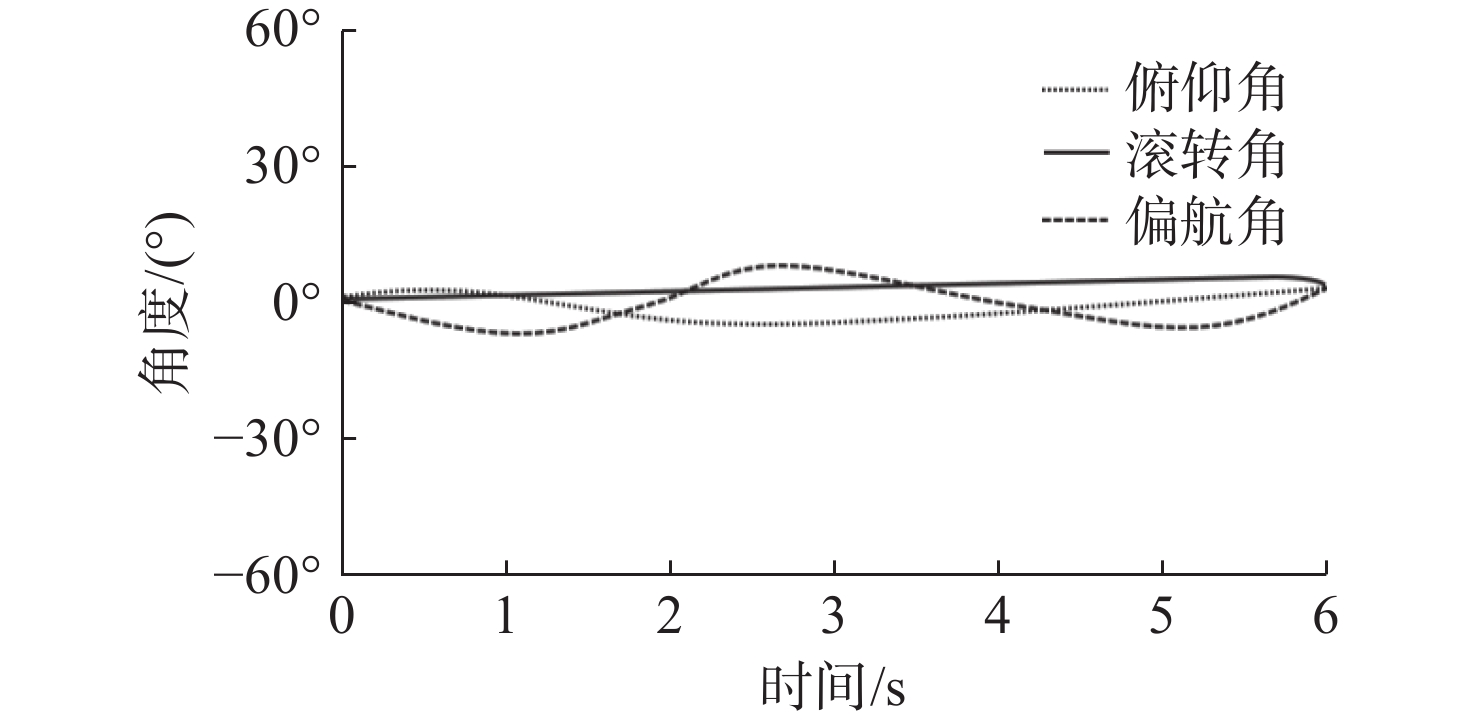
图 19 水下蛇形机器人直线蜿蜒运动陀螺仪角度变化曲线
Figure 19. Angle variation curves of the linear meandering motion gyroscope of the underwater snake robot
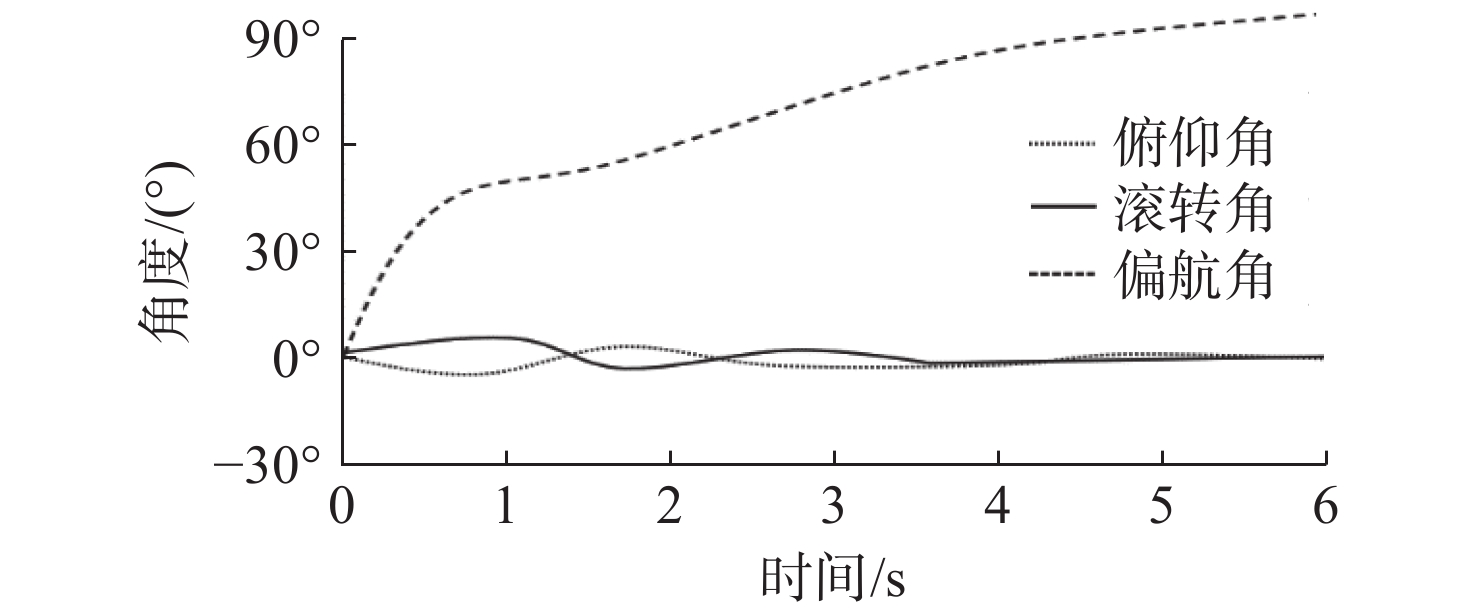
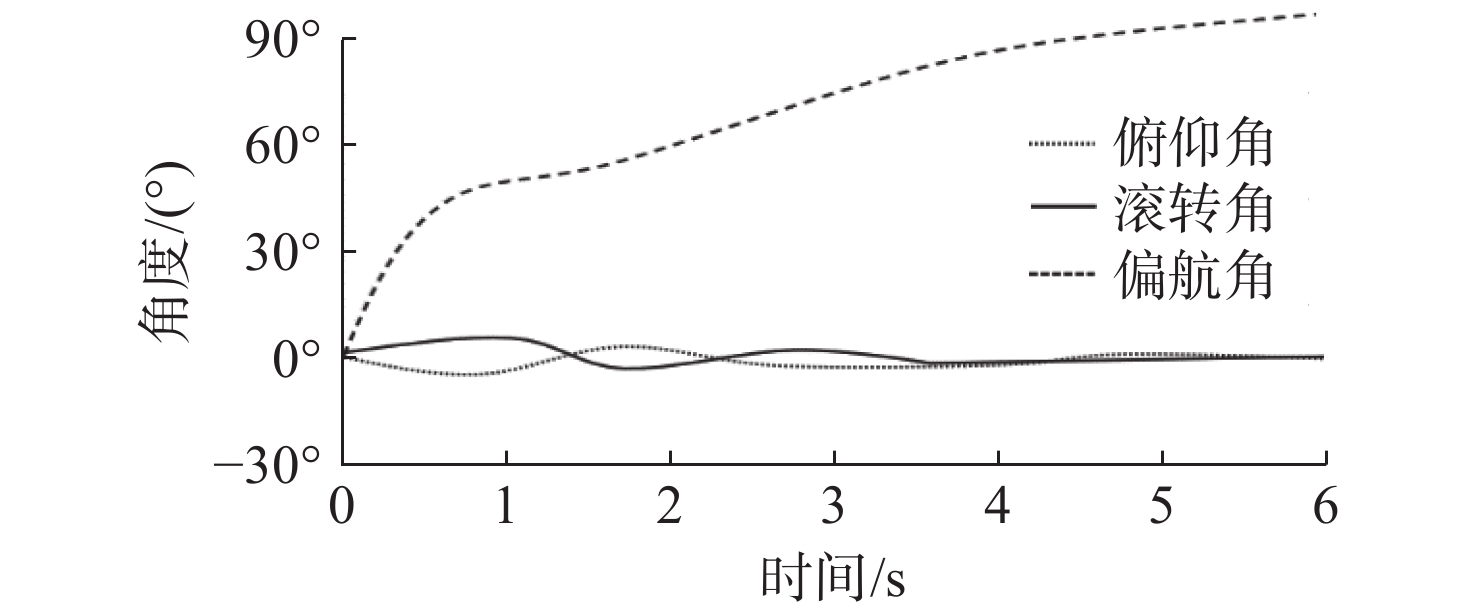
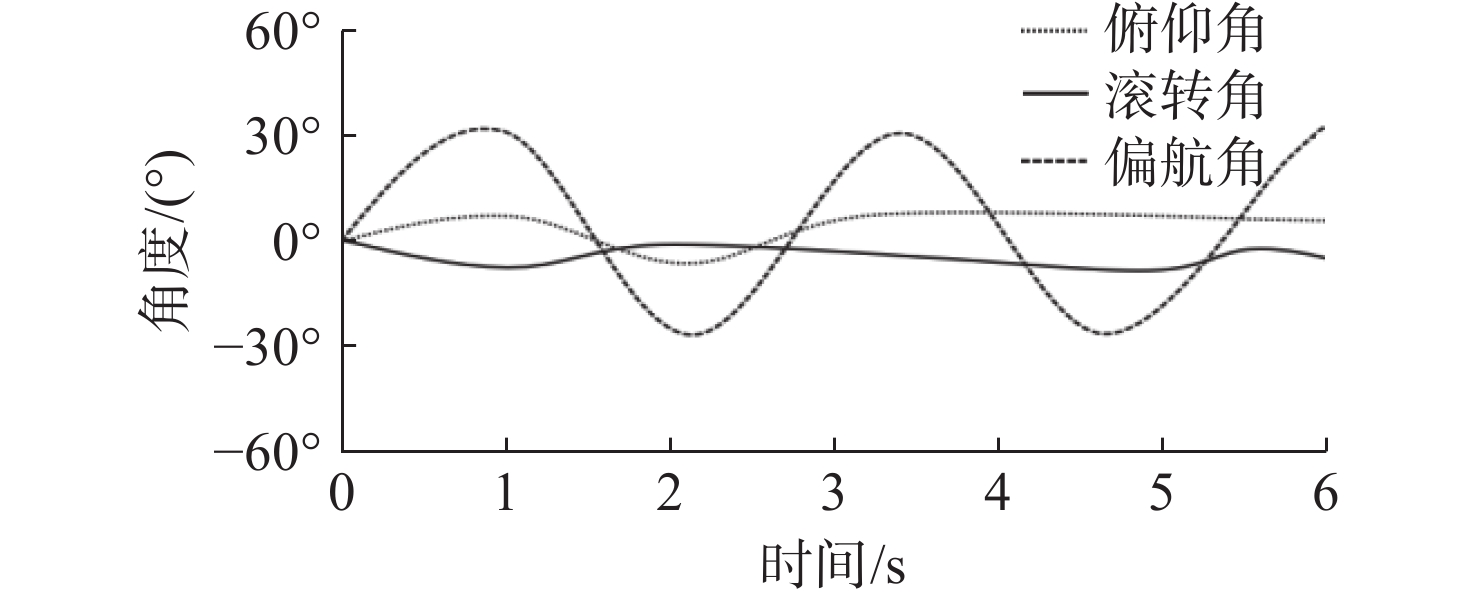
图 21 水下蛇形机器人转弯运动陀螺仪角度变化曲线
Figure 21. Angle variation curves of the turning motion gyroscope of the underwater snake robot
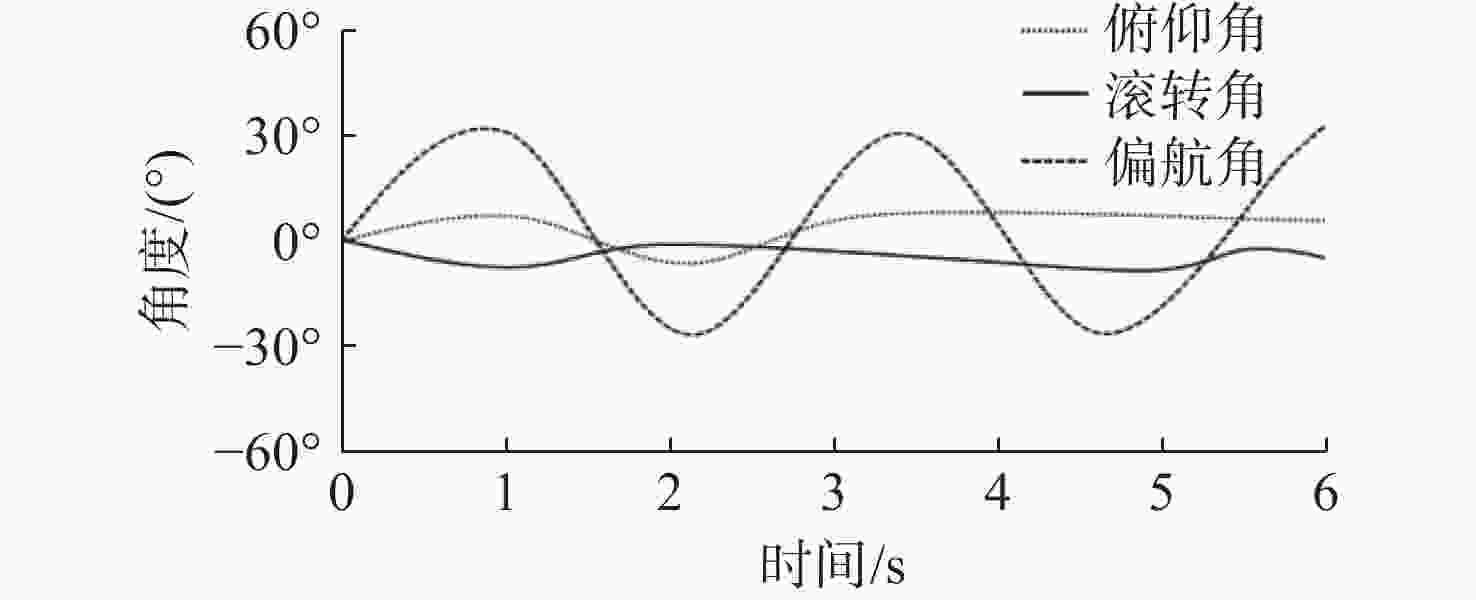
图 23 水下蛇形机器人U型运动陀螺仪角度变化曲线
Figure 23. Angle variation curves of the U-shaped motion gyroscope of the underwater snake robot
表 1 模糊控制规则库
Table 1. Fuzzy control rule library
e $ \Delta e $ 比值 集合 N Z P
$ \Delta {p}_{i}/\Delta {\theta }_{i} $NB PB PB PB NS PS PS PB ZE PS ZE NS PS NS NS NB PB NB NB NB  下载: 导出CSV
下载: 导出CSV
-
[1] 胡文杰, 王楠, 续林刚, 等. 面向水下自主作业的环境安全性态势评估[J]. 中国海洋大学学报(自然科学版), 2024, 54(2): 154-162.HU W J, WANG N, XU L G, et al. Environmental security situation assessment for underwater autonomous operations[J]. Periodical of Ocean University of China(Natural Science)), 2024, 54(2): 154-162. [2] 梁波, 赵宏宇, 王楠. 水下机器人在中国的早期发展[J]. 科学, 2022, 74(3): 53-56, 69.LIANG B, ZHAO H Y, WANG N. The early development of unmanned underwater vehicle in China[J]. Science, 2022, 74(3): 53-56, 69. [3] 李硕, 吴园涛, 李琛, 等. 水下机器人应用及展望[J]. 中国科学院院刊, 2022, 37(7): 910-920.LI S, WU Y T, LI C, et al. Application and prospect of unmanned underwater vehicle[J]. Bulletin of Chinese Academy of Sciences, 2022, 37(7): 910-920. [4] JIA Y Y, MA S G. A decoupled Bayesian method for snake robot control in unstructured environment[J]. Bioinspiration Biomimetics, 2023, 18(6): 066014. [5] LIU J, TONG Y, LIU J. Review of snake robots in constrained environments[J]. Robotics and Autonomous Systems, 2021, 141: 103-118. [6] 李岳泰. 基于矢量推进器的水下蛇形机器人动力学建模及其运动控制研究[D]. 济南: 山东大学, 2021. [7] 安晓松. 用于海底输油管道检测的模块化水下蛇形机器人研究[D]. 北京: 北京化工大学, 2022. [8] 杜雪林, 周灿, 刘颖, 等. 蛇形机器人多步态动力学建模与分析[J/OL]. 机械科学与技术, 2024: 1-12. [2024-09-13]. https://doi.org/10.13433/j.cnki.1003-8728.20230299. [9] LILJEBÄCK P, MILLS R. Eelume: A flexible and subsea resident IMR vehicle[C]//2017 Oceans-Aberdeen. Aberdeen United Kingdom: IEEE, 2017: 1-4. [10] HUANG Z, KONG D, REN C, et al. Performance study of an underwater snake-like robot with aflexible caudal fin[C]//2019 IEEE International Conference on Mechatronics and Automation(ICMA). Tianjin: IEEE, 2019: 1-5. [11] 张军豪, 陈英龙, 杨双喜, 等. 蛇形机器人: 仿生机理, 结构驱动和建模控制[J]. 机械工程学报, 2022, 58(7): 75-92. doi: 10.3901/JME.2022.07.075ZHANG J H, CHEN Y L, YANG S X, et al. Snake robotics: Bionic mechanism, structure, actuation, modeling and control[J]. Journal of Mechanical Engineering, 2022, 58(7): 75-92. doi: 10.3901/JME.2022.07.075 [12] KELASIDI E, PETTERSEN K Y, GRAVDAHL J T, et al. Modeling of underwater snake robots[C]//2014 IEEE International Conference on Robotics and Automation(ICRA). HongKong, China: IEEE, 2014: 4540-4547. [13] YANG K, WANG X, GE T, et al. Dynamic model of underwater snake-like robot using Kane’s method[J]. Journal of Shanghai Jiaotong University(Science), 2014, 19(2): 146-154. doi: 10.1007/s12204-014-1483-9 [14] GALLOT G, IBRAHIM O, KHALIL W. Dynamic modeling and simulation of a 3-D hybrid structure eel-like robot[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation. Rome, Italy: IEEE, 2007: 1486-1491. [15] KHALIL W, GALLOT G, BOYER F. Dynamic modeling and simulation of a 3-D serial eel-like robot[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C(Applications and Reviews), 2007, 37(6): 1259-1268. doi: 10.1109/TSMCC.2007.905831 [16] KELASIDI E, KOHL A M, PETTERSEN K Y, et al. Experimental investigation of locomotion efficiency and path-following for underwater snake robots with and without a caudal fin[J]. Annual Reviews in Control, 2018, 46: 281-294. doi: 10.1016/j.arcontrol.2018.10.001 [17] MORGANSEN K A, TRIPLETT B I, KLEIN D J. Geometric methods for modeling and control of free-swimming fin-actuated underwater vehicles[J]. IEEE Transactions on Robotics, 2007, 23(6): 1184-1199. doi: 10.1109/LED.2007.911625 [18] 施建中, 梁绍华. 一种等价于PI的二型模糊控制器设计算法[J]. 控制工程, 2021, 28(3): 478-487. [19] 孔令宇, 王颖, 许亚, 等. 一种新型浮力称重式动态计量自适应模糊控制器设计[J]. 科学技术与工程, 2019, 19(14): 224-229 doi: 10.3969/j.issn.1671-1815.2019.14.033KONG L Y, WANG Y, XU Y, et al. Design of a new buoyancy weighing dynamic measurement adaptive fuzzy controller[J]. Science Technology and Engineering, 2019, 19(14): 224-229 doi: 10.3969/j.issn.1671-1815.2019.14.033 [20] 周锐, 张宇航, 熊伟, 等. 一种基于模糊控制的平稳滑翔再入制导律[J]. 北京航空航天大学学报, 2021, 47(2): 197-206.ZHOU R, ZHANG Y H, XIONG W, et al. A reentry steady glide guidance algorithm based on fuzzy control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 197-206. [21] 刘恒, 李哲, 杨明辉, 等. 基于模糊控制的全位移平衡机器人设计[J]. 测控技术, 2023, 42(7): 102-109.LIU H, LI Z, YANG M H, et al. Design of full displacement balancing robot based on fuzzy control[J]. Measurement & Control Technology, 2023, 42(7): 102-109. [22] 安晓松. 用于海底输油管道检测的模块化水下蛇形机器人研究[D]. 北京: 北京化工大学, 2023. -

 下载:
下载:












 点击查看大图
点击查看大图
计量
- 文章访问数: 834
- HTML全文浏览量: 246
- PDF下载量: 151
- 被引次数: 0





