摘要:
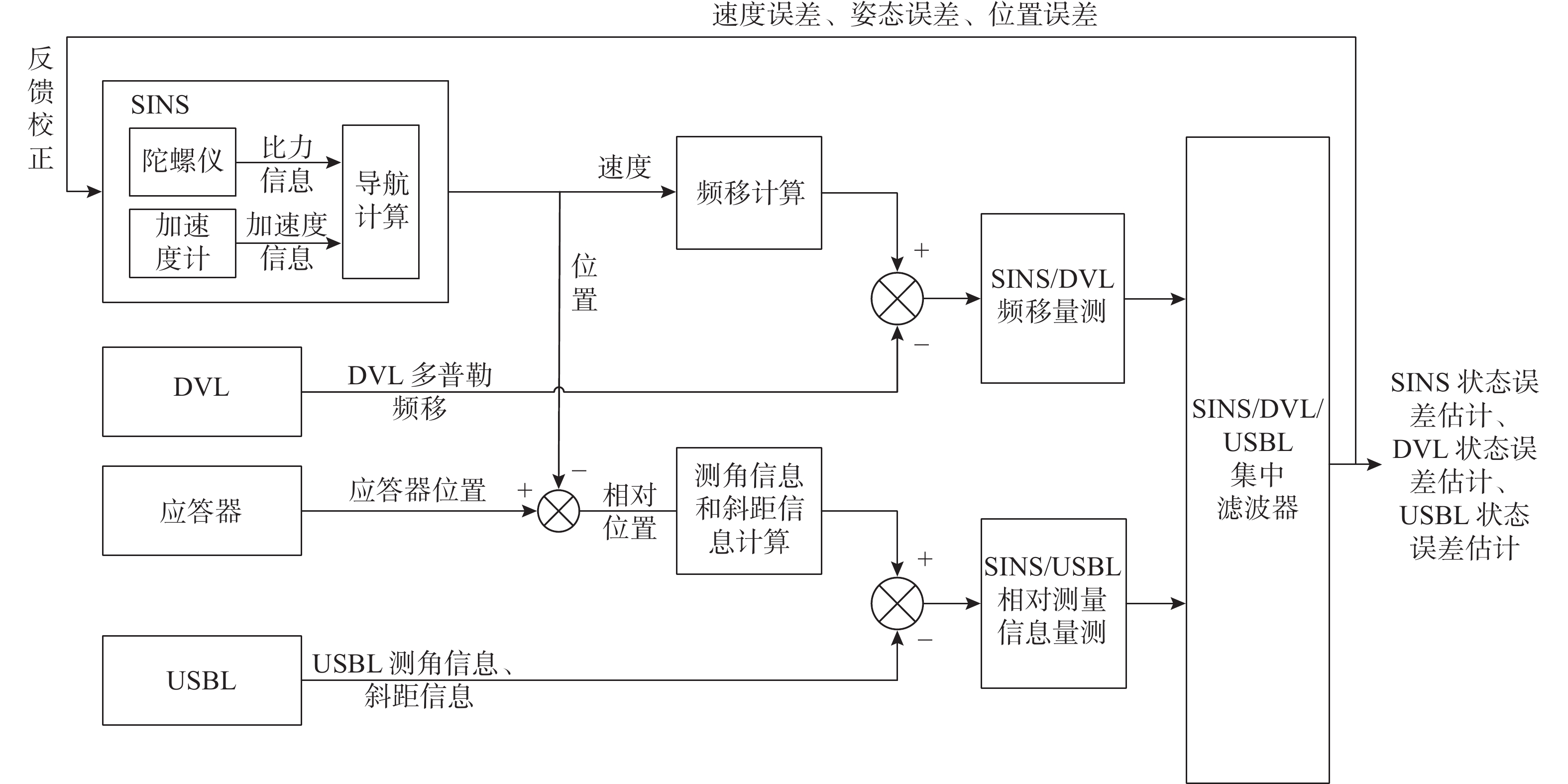
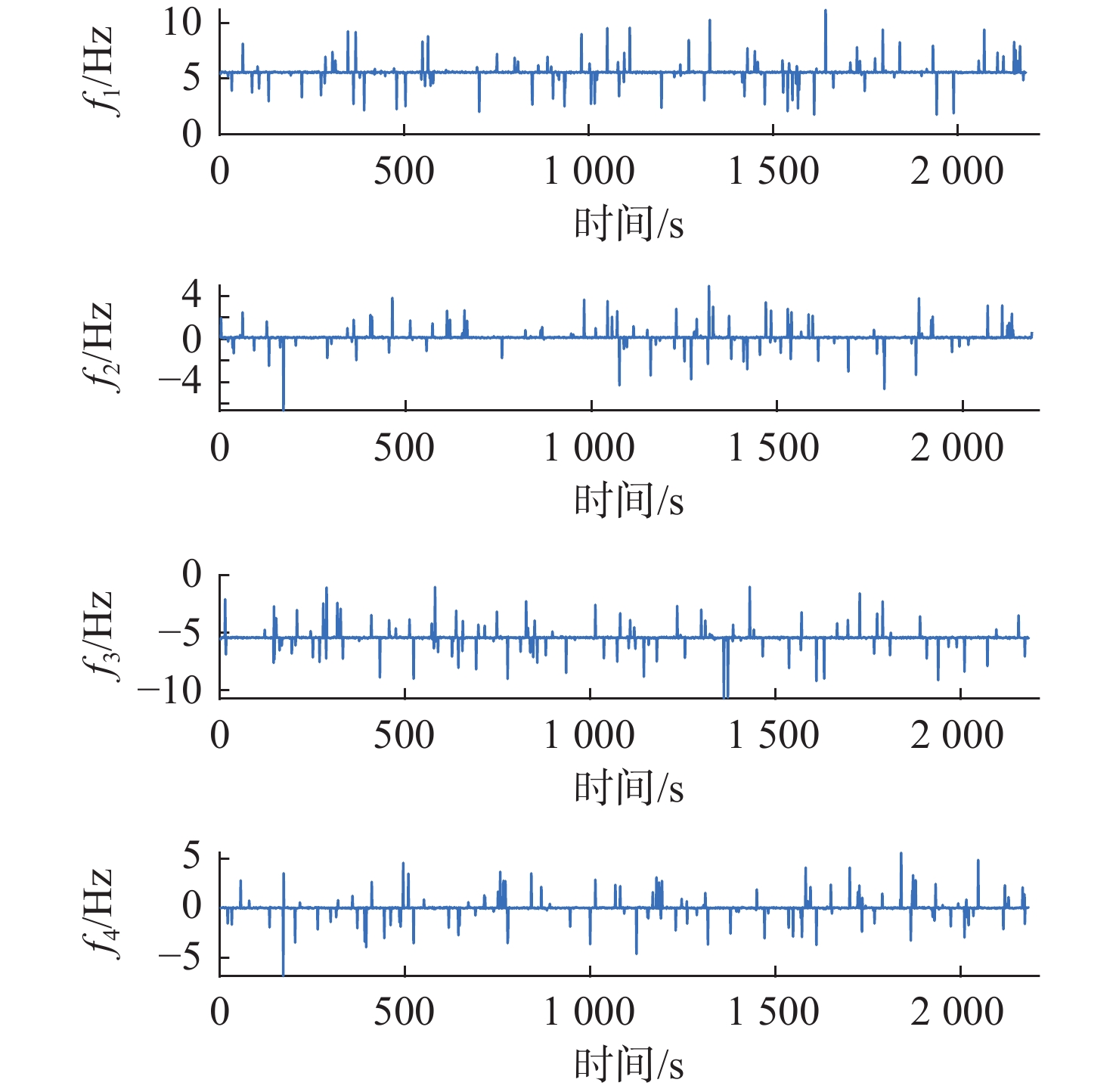
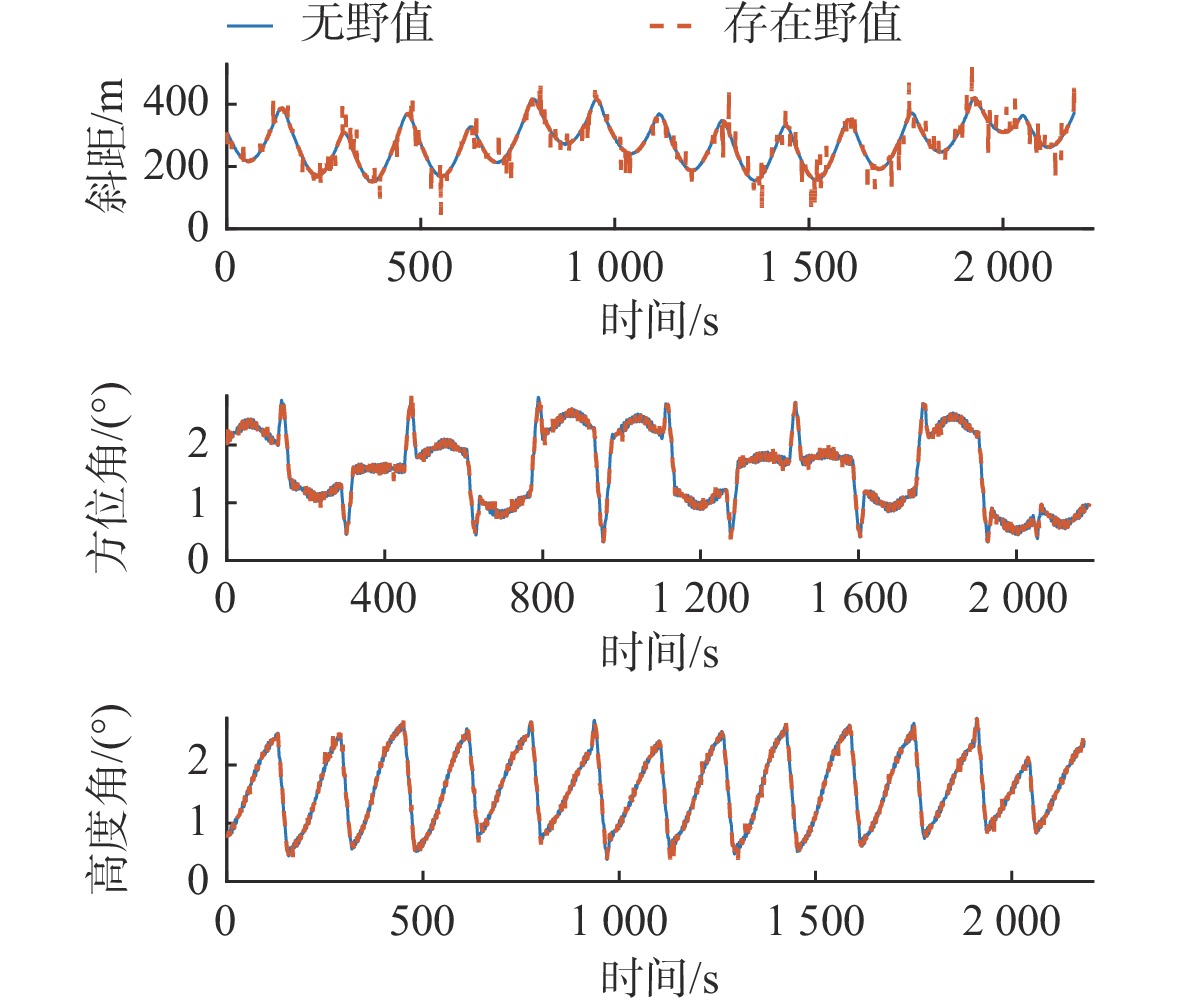
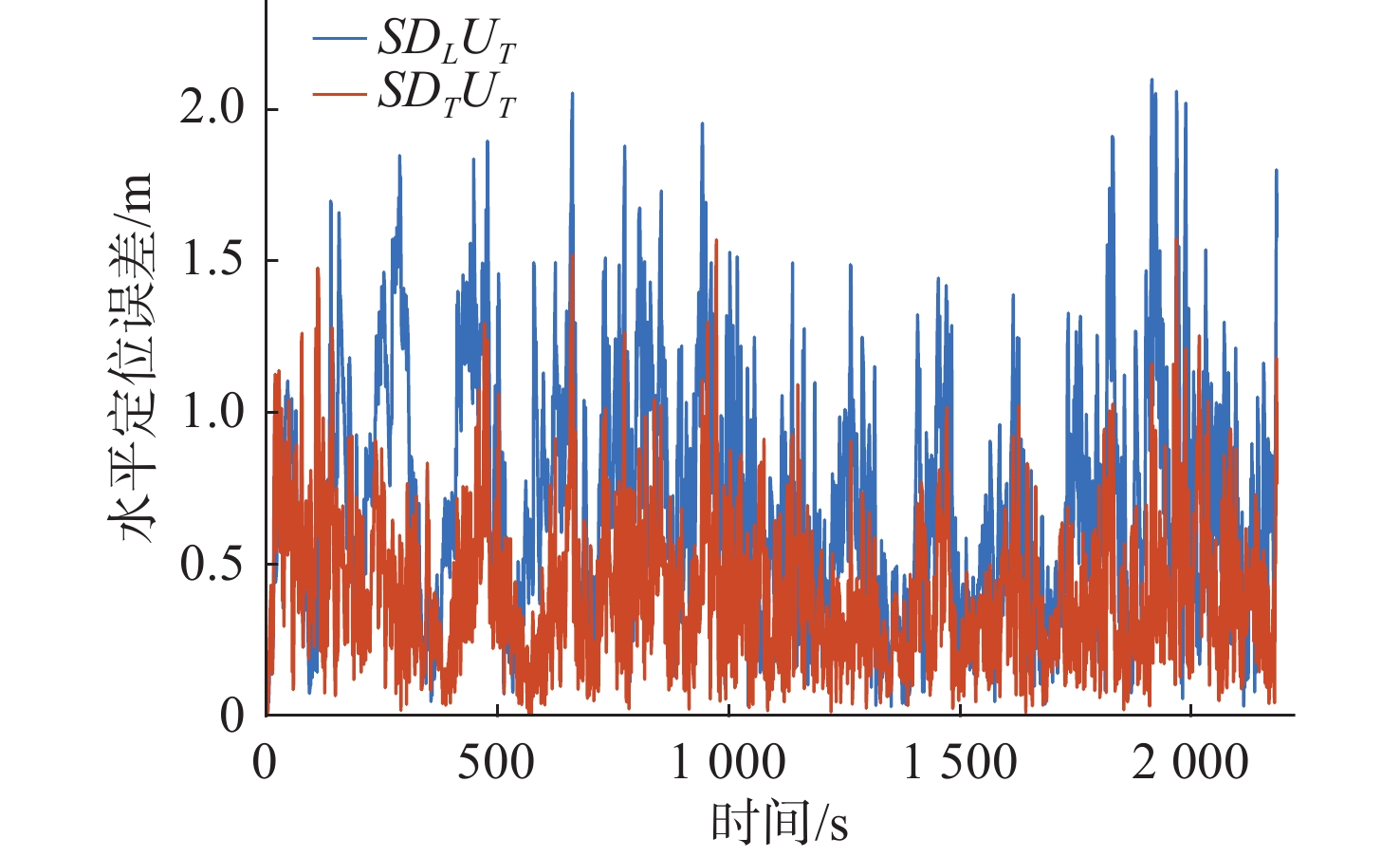
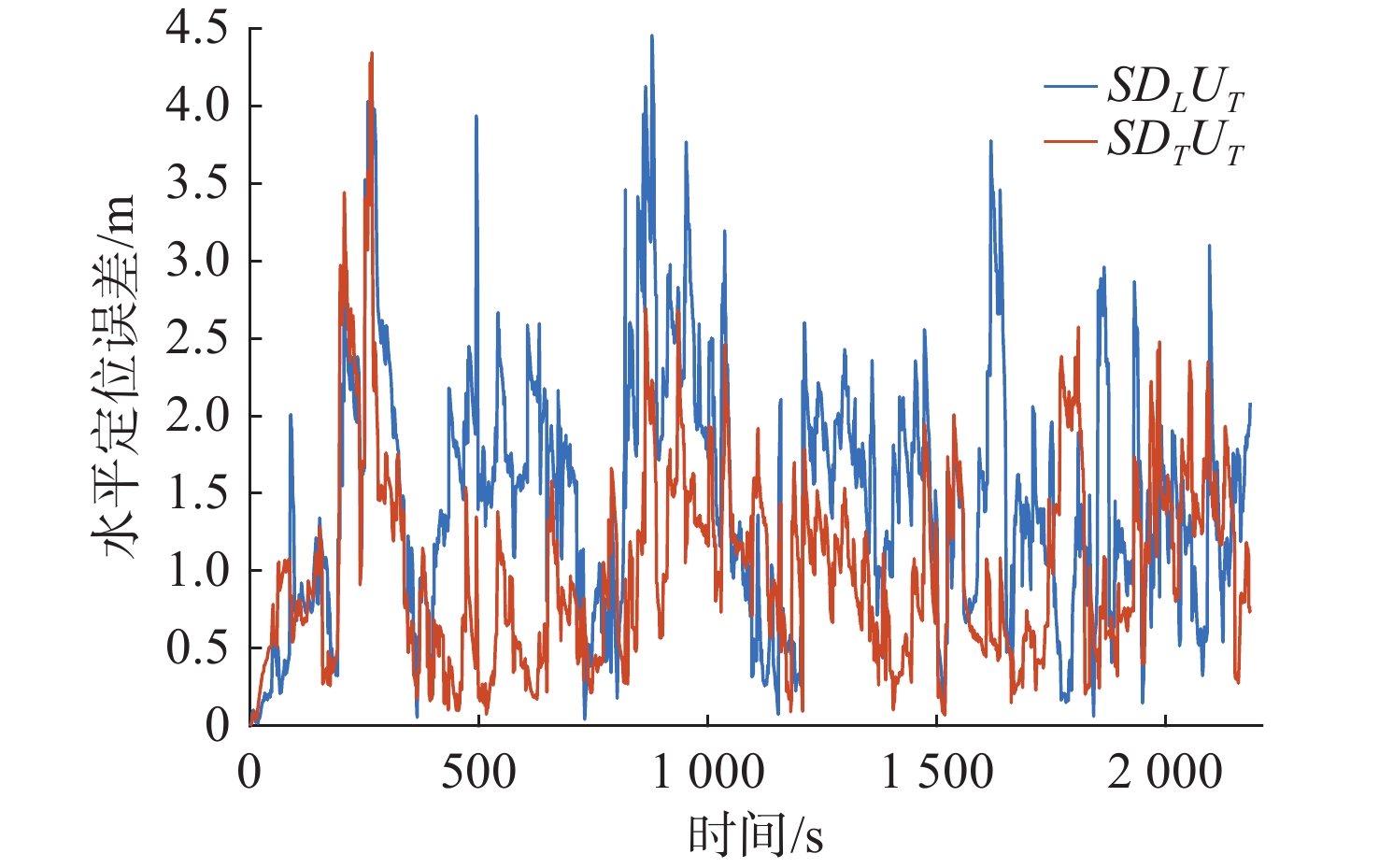
针对自主水下航行器在水下复杂环境下对于高精度、高可靠性的导航定位需求, 提出了一种捷联式惯导系统(SINS)/多普勒测速仪(DVL)/超短基线(USBL)定位系统紧组合导航算法, 构建了基于频移量测的SINS/DVL紧组合量测方程和基于相对测量信息量测的SINS/USBL紧组合量测方程, 通过集中卡尔曼滤波的方法, 对SINS、DVL和USBL的信息进行融合处理。针对水下复杂环境造成导航精度下降的问题, 充分考虑DVL和USBL的数据野值情况, 利用卡方检验法进行判断后对故障数据隔断处理, 实时更新量测方程维数, 保证系统精度。仿真验证可知, 该算法对比其他不同组合模型算法具有较高的定位精度, 对比传统的基于速度量测和相对位置量测的SINS/DVL/USBL集中滤波方法精度可提升约23%; 在DVL数据失效时, 定位误差较正常情况仅增长5.2%; 在USBL数据失效时, 定位误差较正常情况增长165.4%, 鲁棒性和稳定性显著优于基于其他量测的SINS/DVL/USBL的集中滤波导航算法, 可实现高精度和高可靠性的水下导航定位。
章彩霞, 刘锡祥, 黄永江, 等. 基于紧组合的SINS/DVL/USBL导航算法[J]. 水下无人系统学报, 2023, 31(6): 847-855. doi: 10.11993/j.issn.2096-3920.2022-0076.