

Visual Recognition and Detection System for Small Targets of Near-Bottom Exploration Type Bionic UUV
-
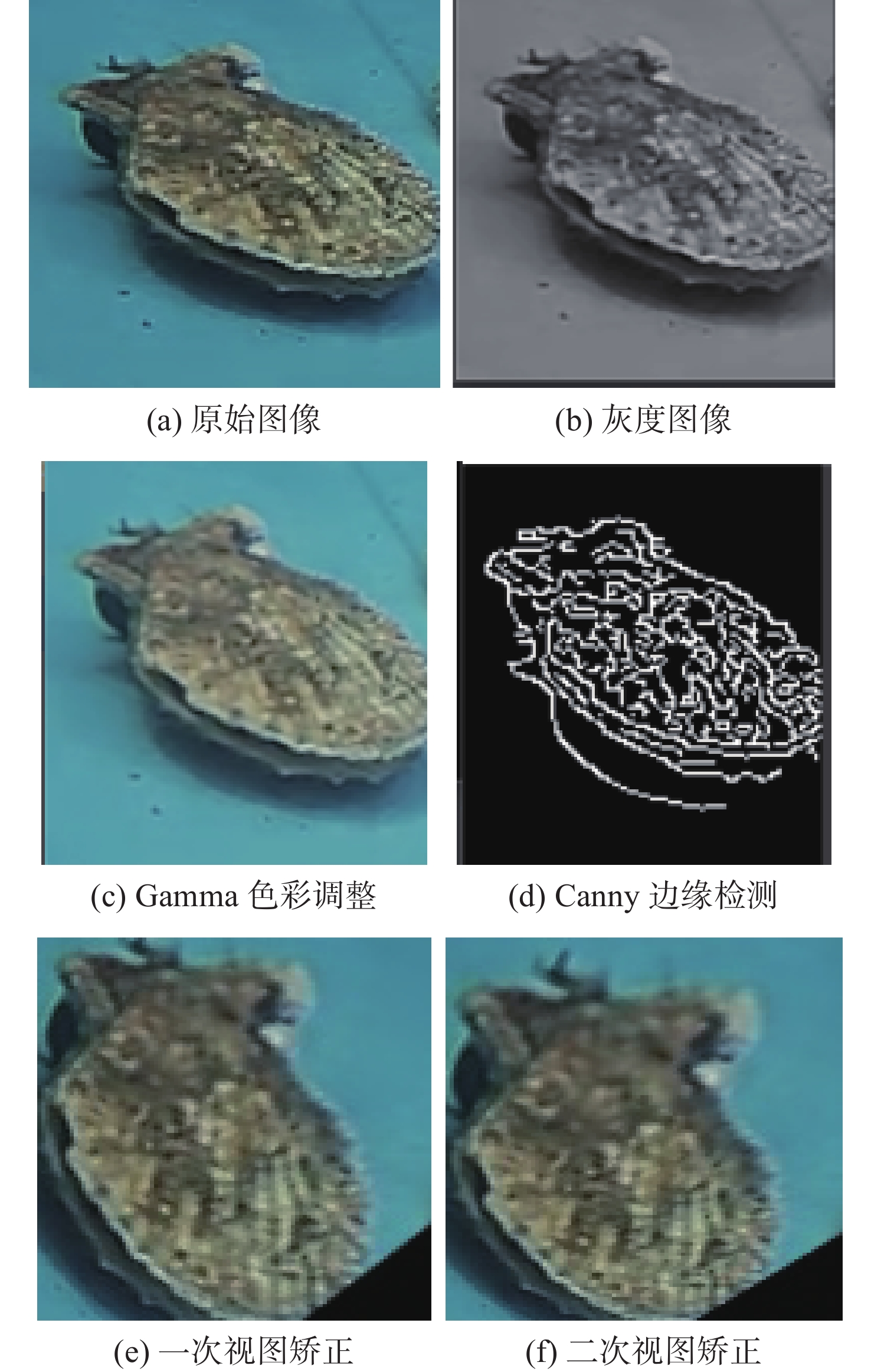
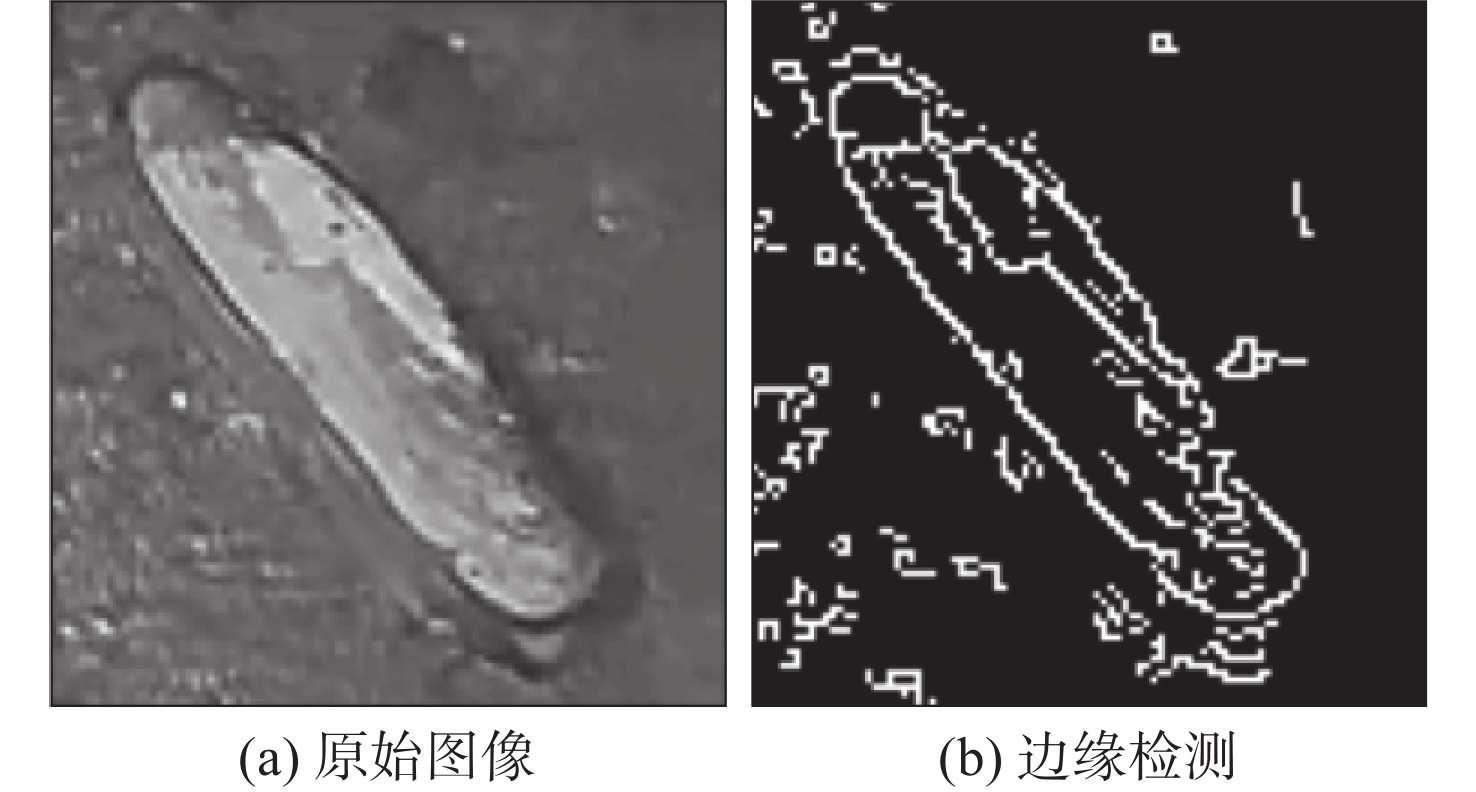
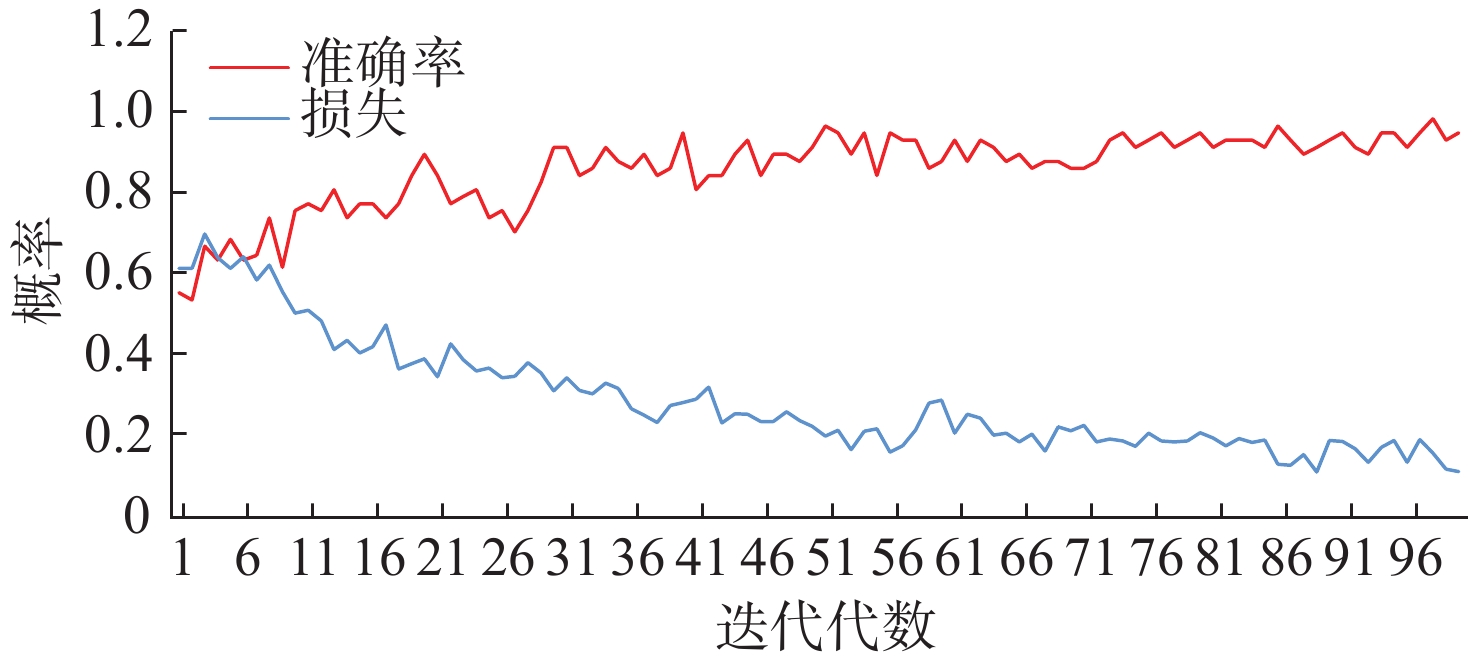
摘要: 仿生无人水下航行器(UUV)通过模仿海洋生物的运动原理, 替代人力并实现水下作业, 相较于传统的UUV具备高稳定性、高灵活性、低噪声以及强环境通过性等仿生学特性优势, 为近距离水下图像拍摄与水下目标物识别技术提供了优良的作业平台。文中以一种仿生胸鳍柔性波动推进UUV作为研究目标, 针对水下小目标物的贴底检测任务, 开展水下图像预处理技术与深度学习网络Resnet优化的深入研究, 设计一套满足该UUV运动特性的水下环境感知系统。最终通过试验进行验证, 文中提出的水下视觉检测方法的分类结果准确率为89.6%, 与其他分类网络相比具有最高的检测准确率, 能够适用于仿生胸鳍波动推进UUV进行水下贴底目标检测任务。在文章结尾对仿生UUV水下检测识别系统的优势与出现的问题进行了分析并提出了展望。Abstract: The bionic unmanned undersea vehicles(UUVs) replace human labor and realize underwater operation by imitating the movement principle of marine organisms. Compared with the traditional UUV, the bionic UUV has the bionics advantages of high stability, high flexibility, low noise, and strong environmental passability, which provides an excellent operating platform for close-range underwater image shooting and underwater target recognition technology. This paper focused on bionic UUVs with flexible wave propulsion by pectoral fin and conducted a comprehensive study on the preprocessing technology of underwater images and the optimization of the Resnet deep learning network, so as to improve the detection of small underwater targets on the sea floor. A series of underwater environment perception systems were developed to align with the motion characteristics of the UUV, which were then verified by the test. The results show that the proposed underwater visual detection approach achieves a classification accuracy of 89.6%, which is the highest compared with other classification networks. This approach can be used for underwater target detection on the sea floor by bionic UUVs with pectoral fin propulsion. The conclusion of the study highlights the advantages and problems of underwater detection and recognition systems of bionic UUVs and their prospects.
-
[1] Sfakiotakis M, Lane M D, Davies B J C. Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Ocean Engineering, 1999, 24(2): 237-252. doi: 10.1109/48.757275 [2] Triantafyllou M S, Triantafyllou G S. An efficient swimming machine[J]. Scientific American, 1995, 272(3): 4540-4548. [3] 贺帆, 赵德安. 基于暗通道先验与YOLO的水下河蟹识别研究[J]. 软件导刊, 2020, 19(5): 29-32.He Fan, Zhao Dean. Recognition of underwater crab based on dark channel prior and YOLO[J]. Software Guide, 2020, 19(5): 29-32. [4] 万鹏, 赵竣威, 朱明, 等. 基于改进ResNet50模型的大宗淡水鱼种类识别方法[J]. 农业工程报, 2021, 37(12): 159-168.Wan Peng, Zhao Junwei, Zhu Ming, et al. Freshwater fish species identification method based on improved ResNet50 model[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(12): 159-168. [5] Pan T, Huang H, Lee Jen, et al. Multi-scale ResNet for real-time underwater object detection[J/OL]. Signal, Image and Video Processing, 2020, 15(5): 941-949. [6] Jeon M, Lee Y, Shin Y S, et al. Underwater object detection and pose estimation using deep learning[J]. IFAC-PapersOnLine, 2019, 52(21): 78-81. doi: 10.1016/j.ifacol.2019.12.286 [7] 唐旭东, 朱炜, 庞永杰, 等. 水下机器人光视觉目标识别系统[J]. 机器人, 2009, 31(2): 171-179. doi: 10.3321/j.issn:1002-0446.2009.02.012Tang Xudong, Zhu Wei, Pang Yongjie, et al. Target recognition system based on optical vision for AUV[J]. Robot, 2009, 31(2): 171-179. doi: 10.3321/j.issn:1002-0446.2009.02.012 [8] Sagara S, Ambar R B, Takemura F. A stereo vision system for underwater vehicle-manipulator systems Proposal of a novel concept using pan-tilt-slidecameras[J]. Journal of Robotics and Mechatronics, 2013, 25(5): 785-794. doi: 10.20965/jrm.2013.p0785 [9] 江明明, 梁建军, 张一帆. 水下增稳视觉采集装置: CN 201820697177.5[P]. 2018-12-11. [10] Yang X, Wu Z X, Liu J C, et al. Design of a camera stabilizer system for robotic fish based on feedback-feedforward control[C]//35th Chinese Control Conference. Piscataway, USA: IEEE, 2016: 6044-6049. [11] Zhang P F, Wu Z X, Wang J, et al. 2-DOF camera stabilization platform for robotic fish based on active disturbance rejection control[C]//IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems. Piscataway, USA: IEEE, 2019: 283-288. [12] 梅家宁. UUV光视觉图像的稳像方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2016. [13] 徐义. 水下图像预处理技术研究[D]. 南京: 南京理工大学, 2013. [14] 吴宇, 蔡永斌, 汤荣华. 水下视觉图像处理和识别技术研究[J]. 舰船电子工程, 2019, 39(5): 93-96. doi: 10.3969/j.issn.1672-9730.2019.05.024Wu Yu, Cai Yongbin, Tang Ronghua. Research on the underwater optical imaging processing and identification[J]. Ship Electronic Engineering, 2019, 39(5): 93-96. doi: 10.3969/j.issn.1672-9730.2019.05.024 [15] 梅永, 庄建军. 基于Canny边缘检测的图像预处理优化算法[J]. 信息技术, 2022(1): 75-79. doi: 10.13274/j.cnki.hdzj.2022.01.014 -

 下载:
下载:






 点击查看大图
点击查看大图
图(17)
计量
- 文章访问数: 70
- HTML全文浏览量: 12
- PDF下载量: 43
- 被引次数: 0




