摘要:
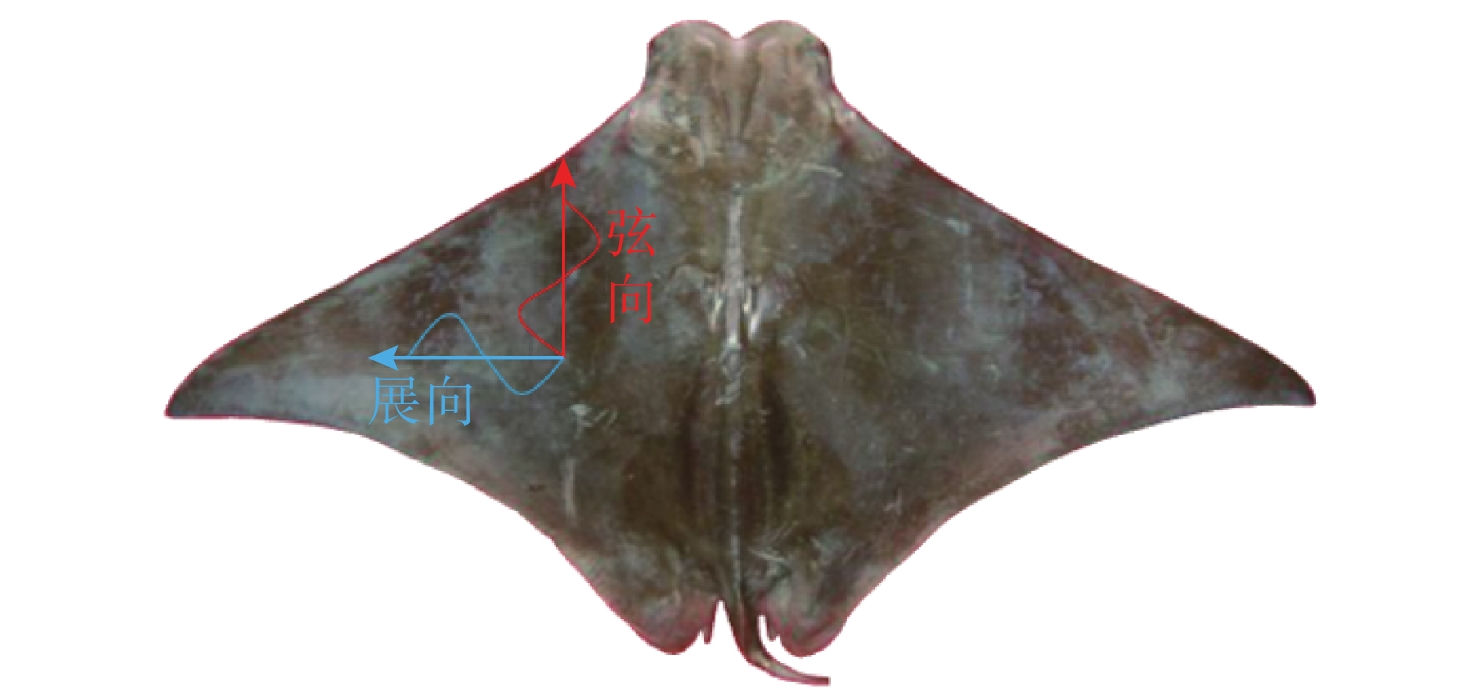
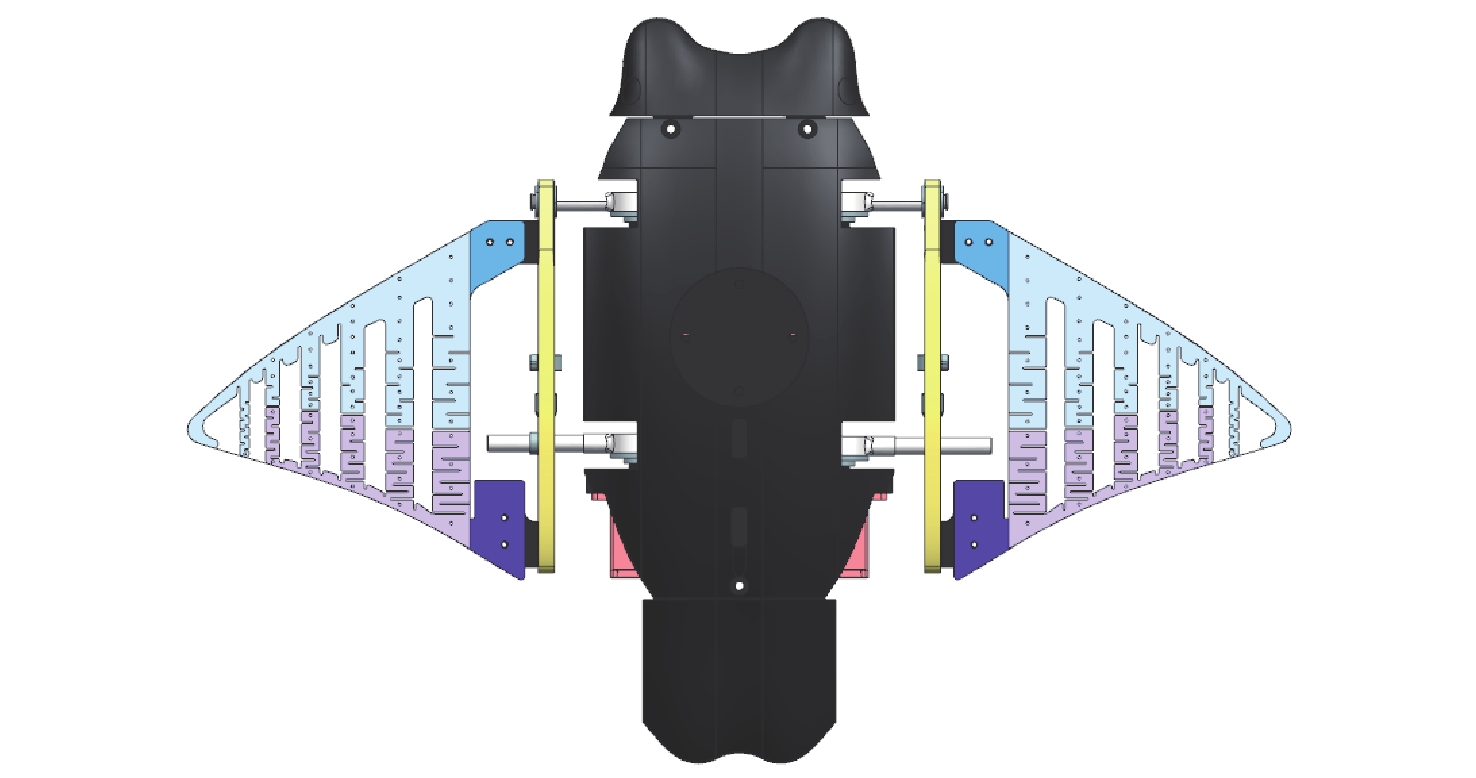
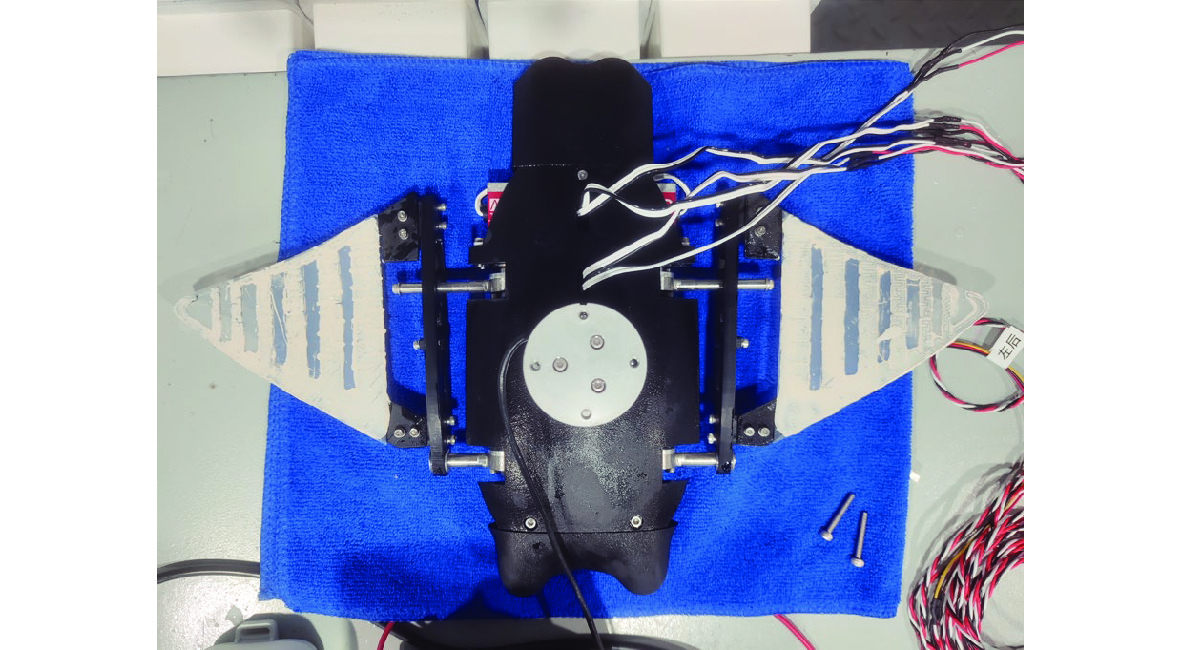
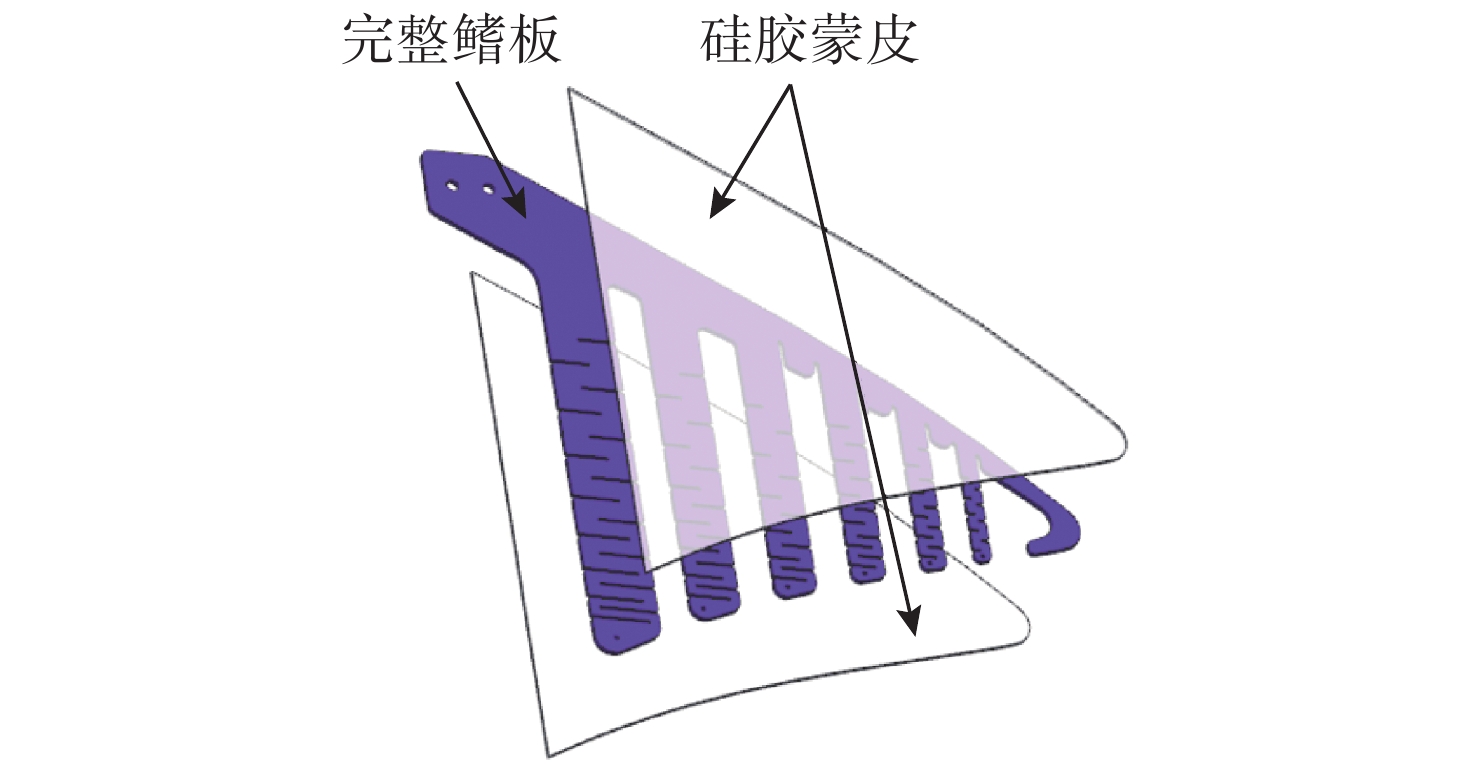
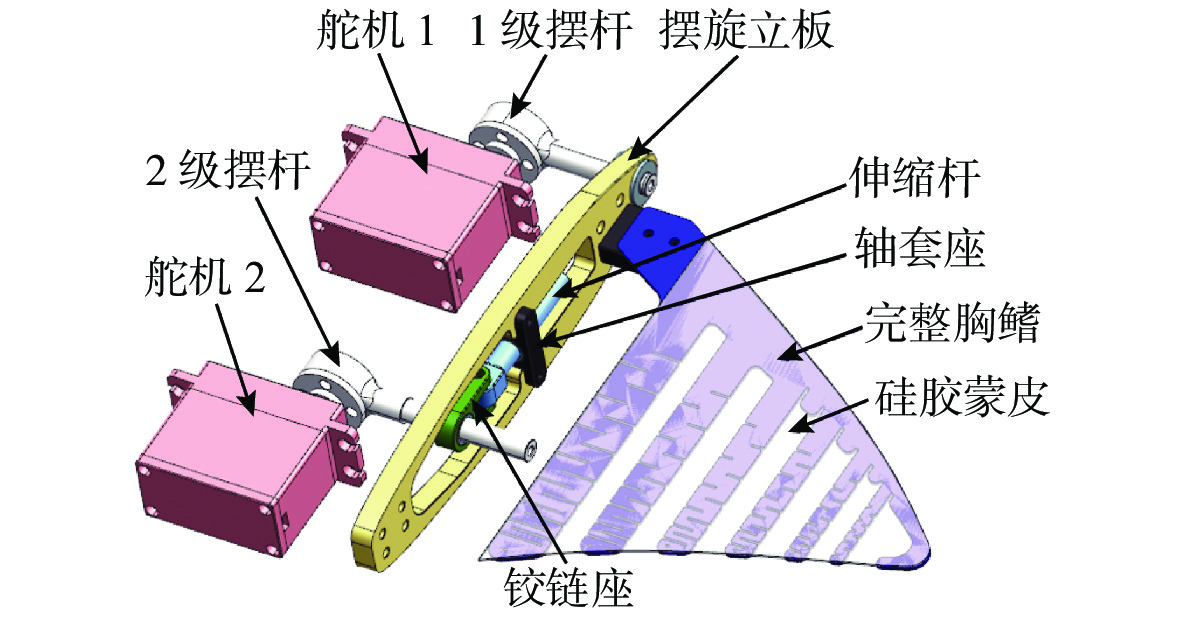
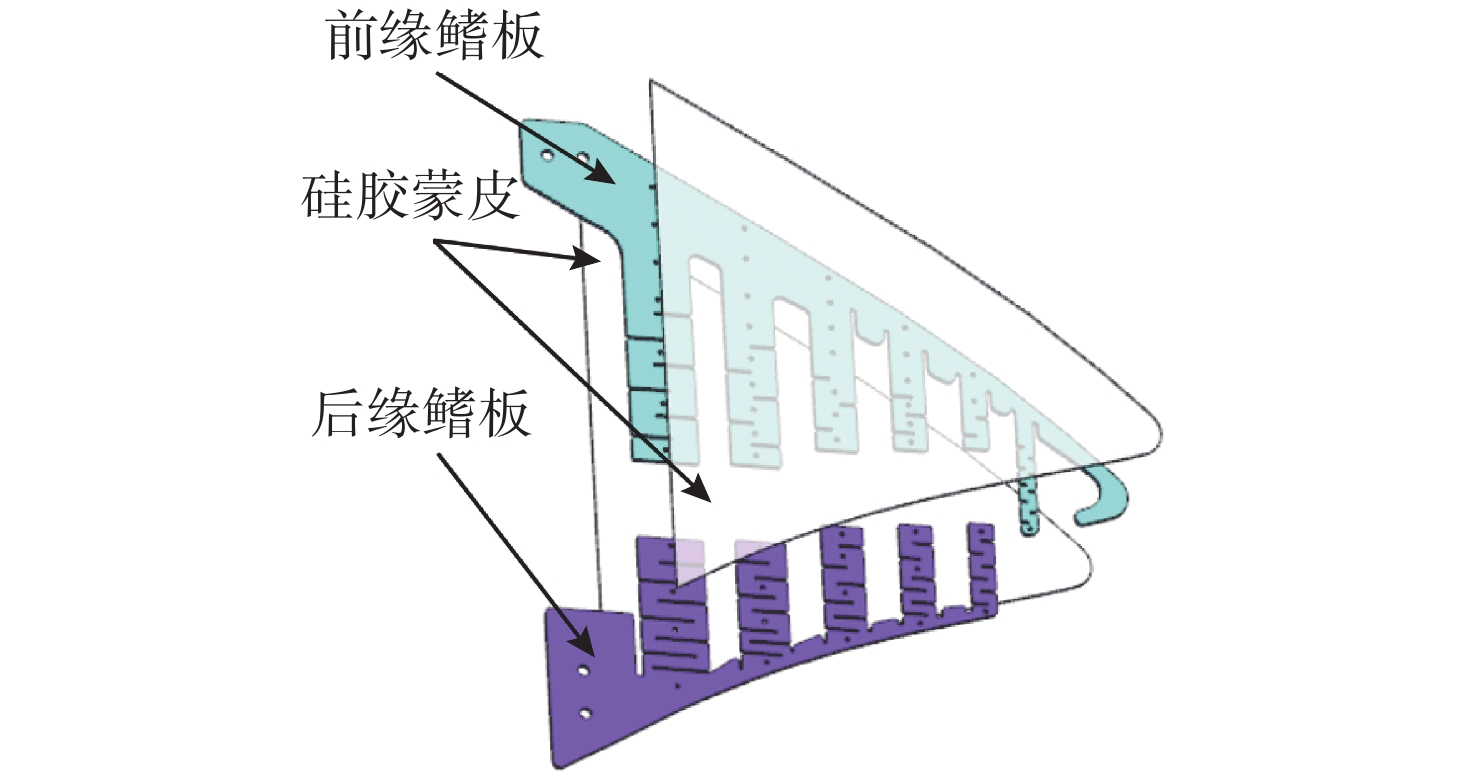
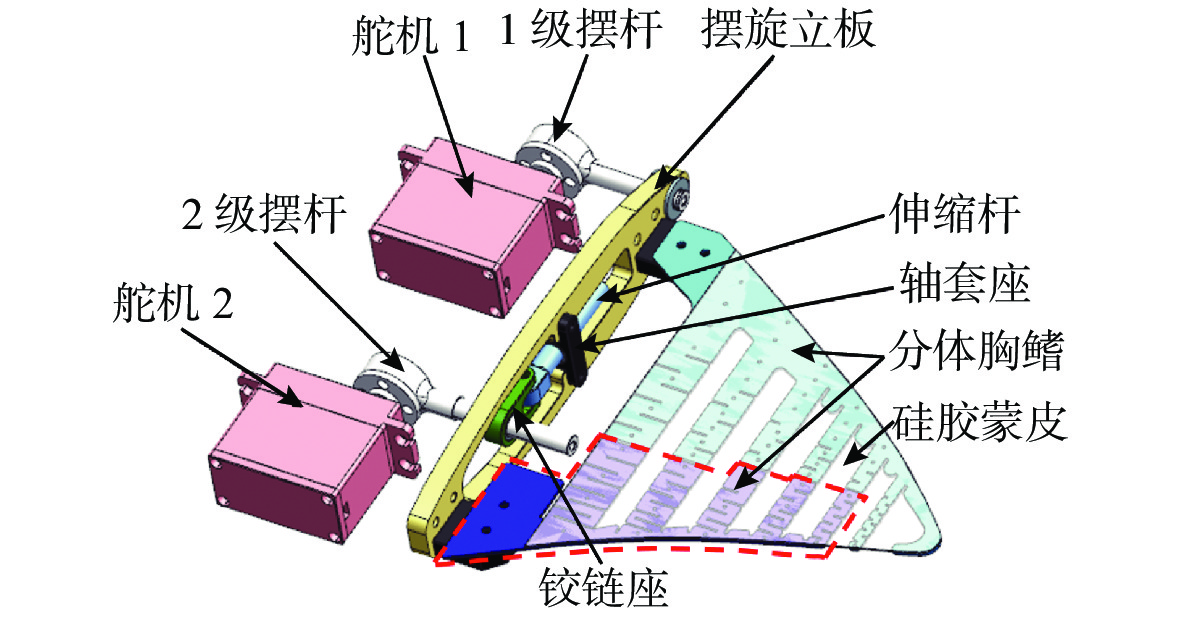
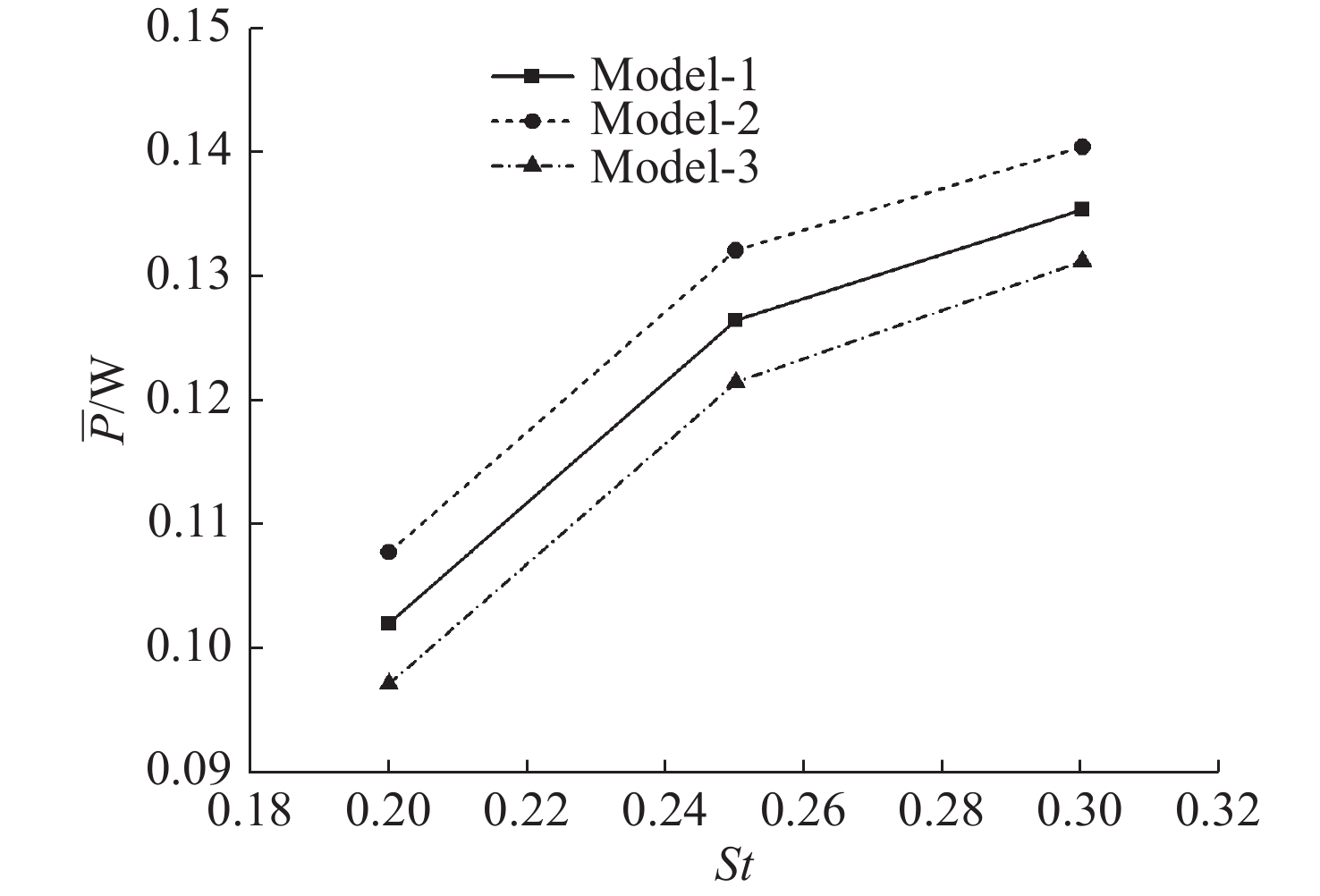
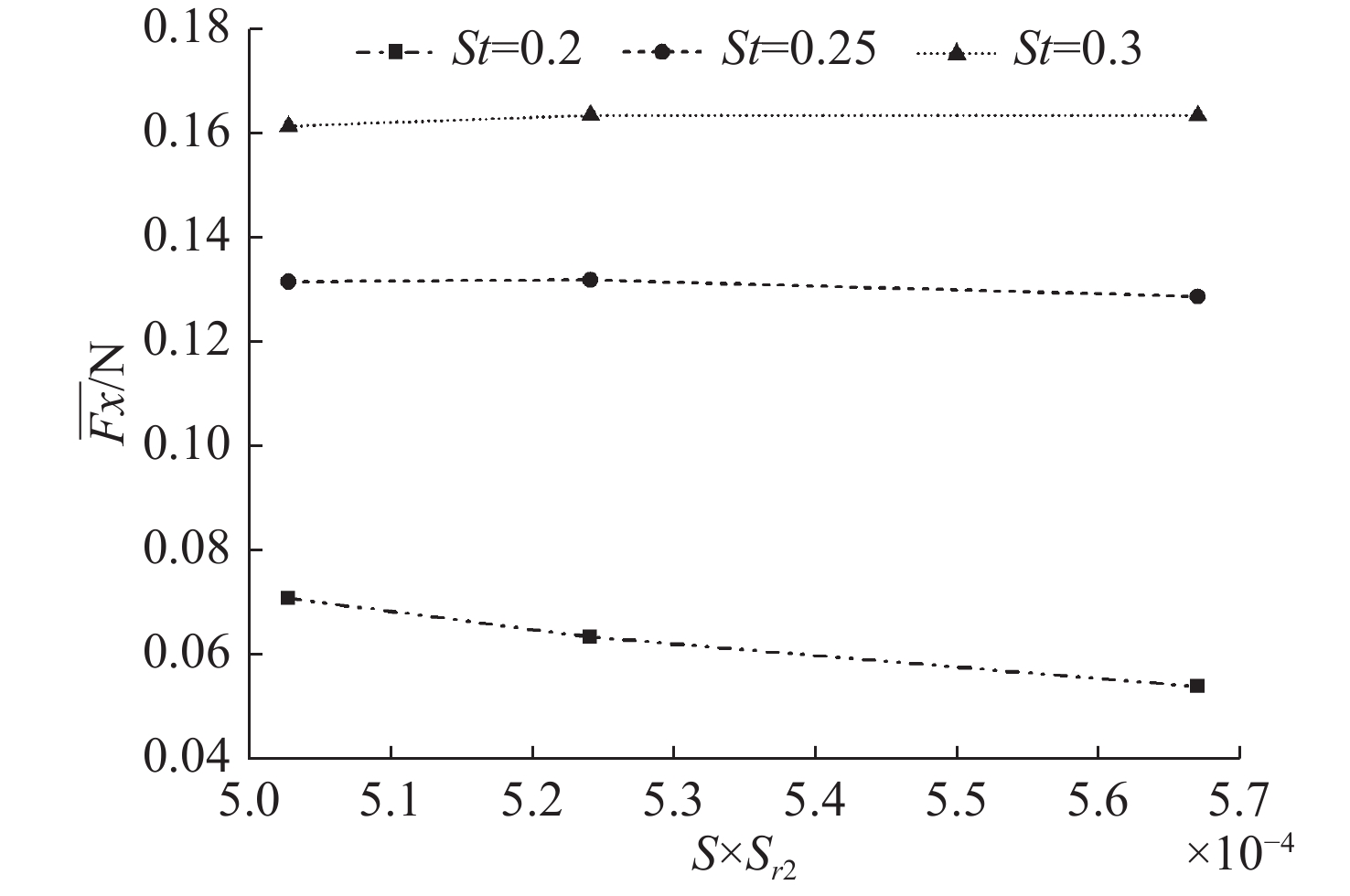
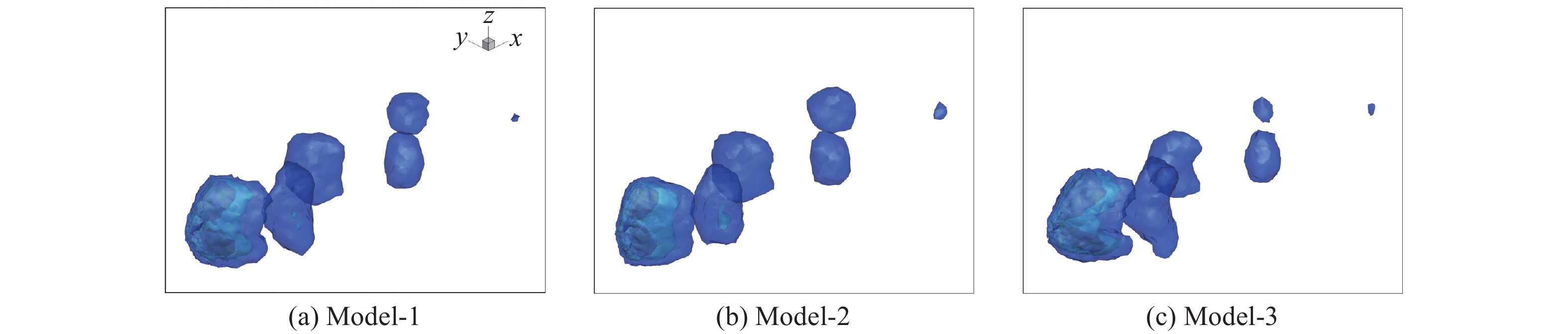
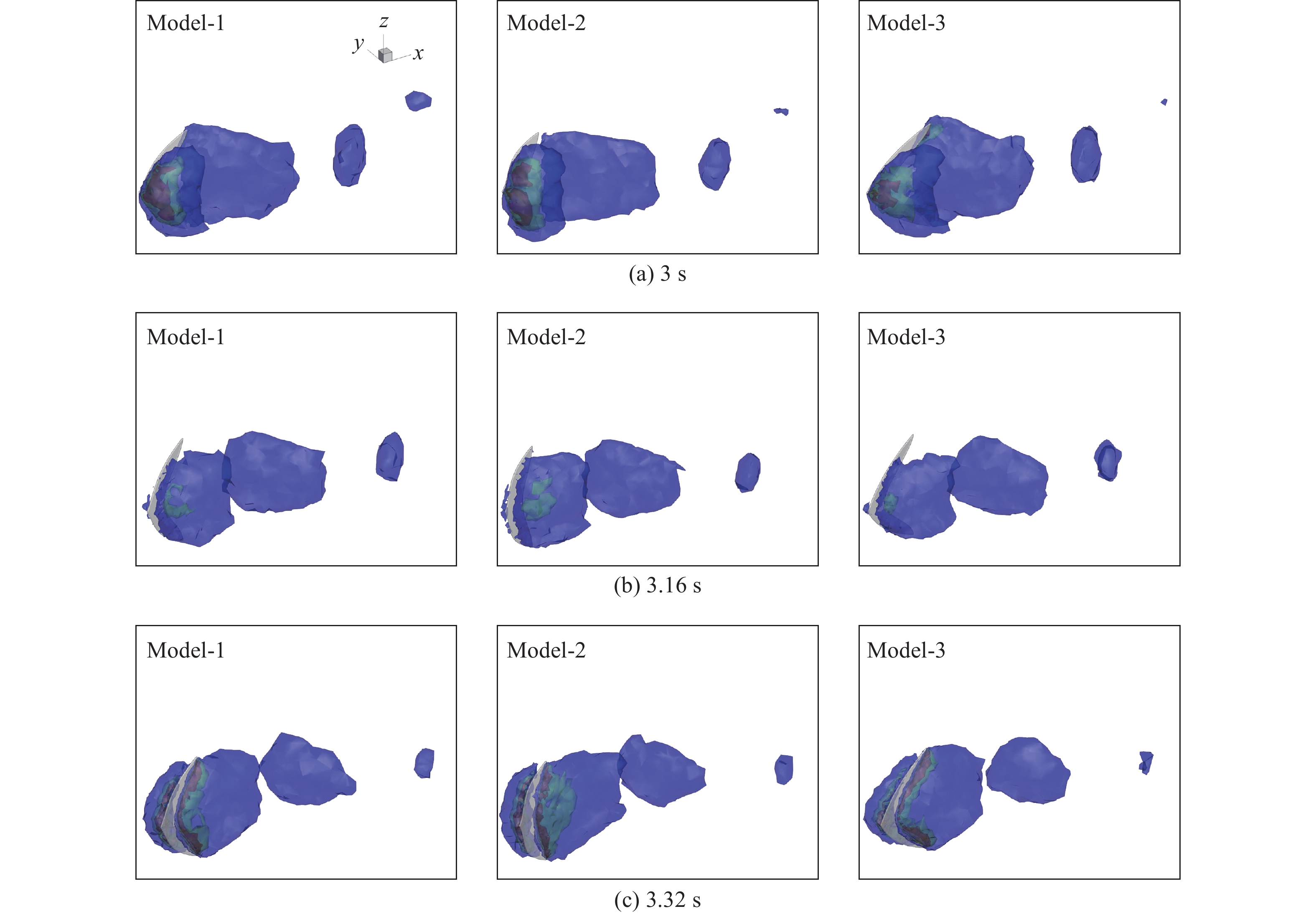
现有基于摆动胸鳍推进方式的机器鱼有很多突出特点, 特别是前向游动稳定性, 但倒游性能研究不足, 因此文中针对性地讨论摆动胸鳍推进模式的仿牛鼻鲼机器鱼倒游水动力性能。分别设计了完整胸鳍结构与分体胸鳍结构, 通过对比实验测试验证了分体胸鳍结构较完整胸鳍结构倒游推力的优越性, 通过推力和电流的比值进一步分析能耗转化效率。实验研究了前游和倒游推力与幅值和频率变化之间的关系, 并且通过采集的电流数据, 整理出2种胸鳍结构在前游和倒游工况下的推力等效效率与幅值和频率变化关系曲线; 分析了2种胸鳍结构产生推力及推力等效效率的原因。实验结果表明: 前游工况下, 2种胸鳍推力值接近, 倒游工况下, 随着幅值和频率的增加, 分体胸鳍结构倒游推力增加明显, 最大可达0.22 N; 前游工况下, 分体胸鳍结构推力等效效率较完整胸鳍稍差, 倒游工况下, 随着幅值和频率的增加, 分体胸鳍结构倒游推力等效效率有显著提升。文中对分体胸鳍结构的设计为探究基于摆旋机构推进机器鱼倒游性能提供了参考。
李博, 余应明, 曹永辉, 等. 仿牛鼻鲼机器鱼倒游性能胸鳍结构设计与实验[J]. 水下无人系统学报, 2024, 32(1): 32-39. doi: 10.11993/j.issn.2096-3920.2023-0157.