

Simulation Analysis of Variable Cross-section Linetype Optimization for Swim-out Tube in UUVs
-
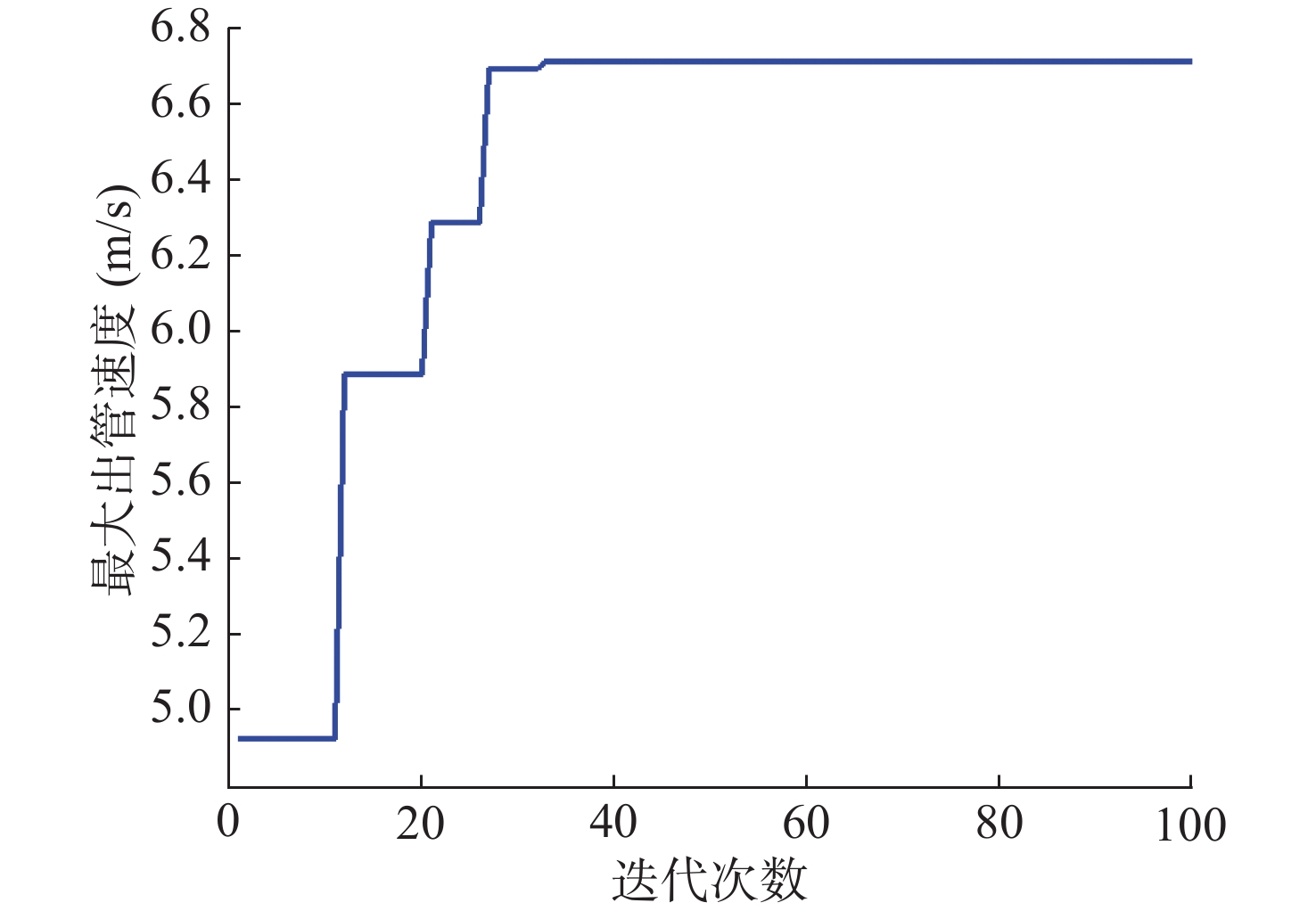
摘要: 为设计适用于无人水下航行器(UUV)变截面的自航发射装置, 文中基于电动力鱼雷推力模型和自航发射过程受力模型, 分析鱼雷自航发射过程中所受的推力、流体阻力、沿程阻力和局部阻力, 依据运动学方程, 建立鱼雷自航发射数学模型, 依据数学模型建立仿真程序计算出管速度, 以出管速度为关键指标优化UUV变截面自航发射管线型。结合变截面发射管结构特点和设计需求, 确定发射管各段长度和直径作为约束条件, 进而建立优化问题的数学表达式,为加快收敛, 采用自适应变异概率的遗传算法进行发射管线型寻优计算, 进行100代仿真计算, 比较出管速度最终得出优化结果, 以结果为依据绘制了自航发射管最优线型, 对探索UUV变截面发射技术进行了有益尝试, 为变截面自航发射管设计提供了理论依据。Abstract: In order to design the swim-out launcher unit for unmanned undersea vehicle(UUV), based on the thrust model and force model of swim-out launch process for electric torpedoes, the paper analyzes the thrust, fluid resistance, course resistance, and local resistance suffered by the torpedo during its swim-out launch process, establish a mathematical model for torpedo swim-out launch, and establish a simulation program to calculate the tube-exit velocity. Taking the launching speed as a key indicator, the linetype of variable cross-section swim-out tube is optimized. Determine the length and diameter of each section of the launch tube as constraints, and then build the mathematical expression of the optimization problem. To accelerate convergence, a genetic algorithm with adaptive mutation probability is used for optimizing the linetype of the tube, and 100 generations of simulation calculations are conducted. Compare the launching speed to obtain the optimization result. Based on the results, the optimal linetype of swim-out tubes is drawn. This result is a beneficial attempt to explore the variable cross-section launch technology of UUV and provides a theoretical basis for the design of the variable cross-section swim-out tube.
-
Key words:
- unmanned undersea vehicle /
- swim-out launching /
- tube /
- linetype optimization
-
表 1 遗传算法优化计算结果
Table 1. Calculation results of genetic algorithm optimization
进化代数 $ {D_1} $/m L1/m L2/m L3/m vt/(m/s) 1 0.592 5.569 1.163 1.268 4.930 12 0.658 3.621 3.321 1.058 5.888 21 0.661 3.921 2.922 1.157 6.288 27 0.657 5.526 1.374 1.100 6.688 33 0.655 4.599 2.309 1.092 6.708 100 0.655 4.599 2.309 1.092 6.708  下载: 导出CSV
下载: 导出CSV
-
[1] 邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关键技术分析[J]. 水下无人系统学报, 2023, 31(1): 1-9.Qiu Zhiming, Ma Yan, Meng Xiangyao, et al. Analysis on the development trend and key technologies of unmanned underwater equipment[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 1-9. [2] 袁思鸣. 国外无人水下航行器装备与技术探讨[J]. 通讯世界, 2021(5): 253-254.Yuan Siming. Exploration of foreign unmanned underwater vehicle equipment and technology[J]. Communication World, 2021(5): 253-254. [3] 朱丹. 美军自主水下航行器发展研究[J]. 指挥控制与仿真, 2020, 42(1): 135-140.Zhu Dan. Research on the development of US autonomous underwater vehicles[J]. Command Control & Simulation, 2020, 42(1): 135-140. [4] 孙玉松, 李宗吉, 练永庆. UUV鱼雷发射装置的选型设计[J]. 四川兵工学报, 2014, 35(8): 36-38.Sun Yusong, Li Zongji, Lian Yongqing. Selection and design of UUV torpedo launch device[J]. Journal of Ordnance Equipment Engineering, 2014, 35 (8): 36-38. [5] 孙玉松, 李宗吉, 练永庆. UUV自航发射鱼雷过程仿真[J]. 水下无人系统学报, 2014, 22(5): 396-400.Sun Yusong, Li Zongji, Lian Yongqing. Process simulation of torpedo swim-out launching from UUV[J]. Journal of Unmanned Undersea Systems, 2014, 22(5): 396-400. [6] 段浩, 李经源. 鱼雷发射技术[M]. 北京: 国防工业出版社, 2015. [7] 练永庆, 王树宗. 鱼雷发射装置设计原理[M]. 北京: 国防工业出版社, 2012. [8] 王燕飞, 张振山, 江帆. 自航式鱼雷发射装置发射管长度优化研究[J]. 海军工程大学学报, 2005, 17(4): 56-59.Wang Yanfei, Zhang Zhenshan, Jiang Fan. Research on optimization of the launch tube length of self propelled torpedo launch devices[J]. Journal of Naval Engineering University, 2005, 17(4): 56-59. [9] 周明, 孙树栋. 遗传算法原理及应用[M]. 北京: 国防工业出版社, 1999. [10] 张克锐, 李庆领, 王传伟, 等. 基于遗传算法的高速列车头型多目标优化[J]. 计算机与数字工程, 2021, 49(7): 1330-1336.Zhang Kerui, Li Qingling, Wang Chuanwei, et al. Multi-objective optimization of high-speed train head based on genetic algorithm[J]. Computer & Digital Engineering, 2021, 49(7): 1330-1336. -





 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 14
- HTML全文浏览量: 1
- PDF下载量: 9
- 被引次数: 0




