

Pectoral Fin Structural Design and Experiments on Robotic Cow-Nosed Ray with Backward Swimming Performance
-
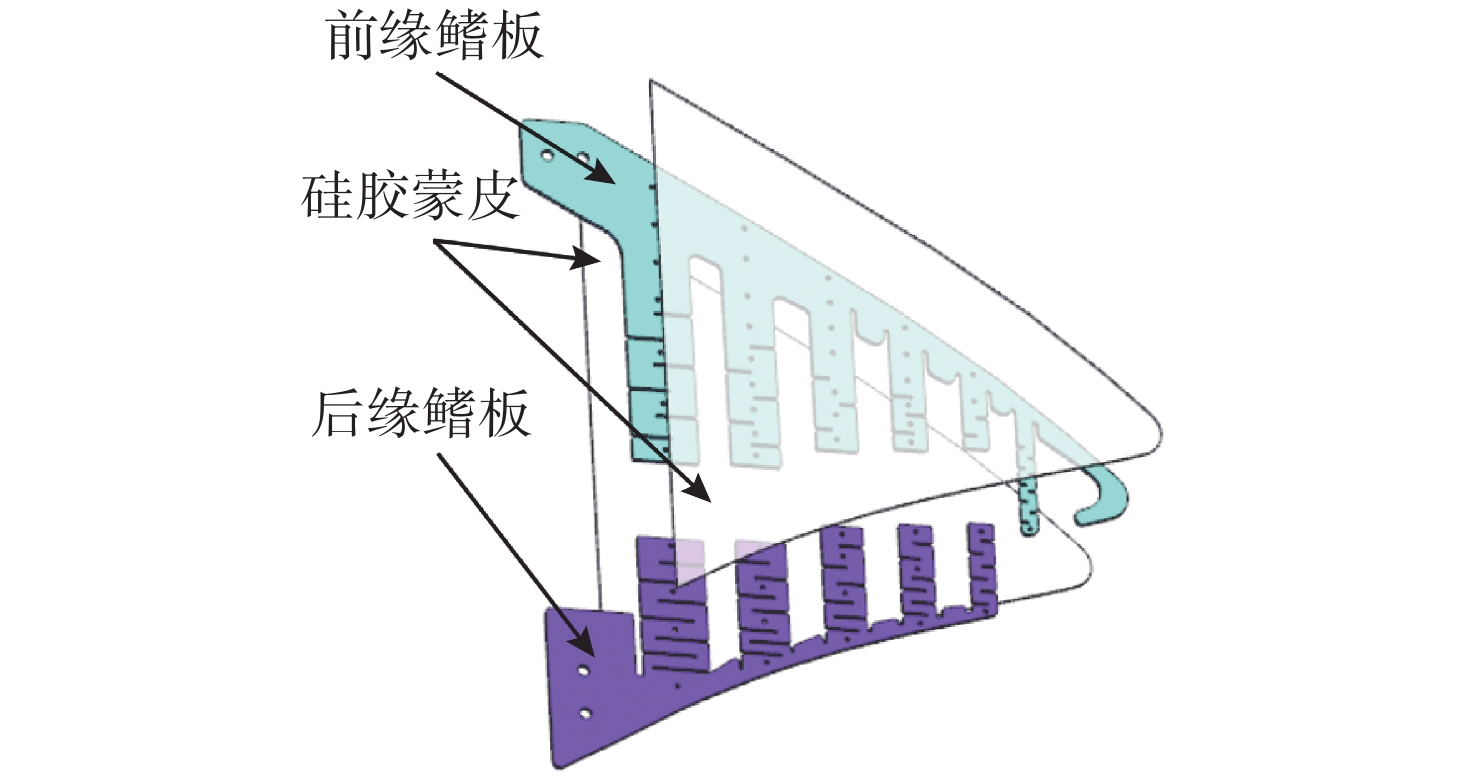
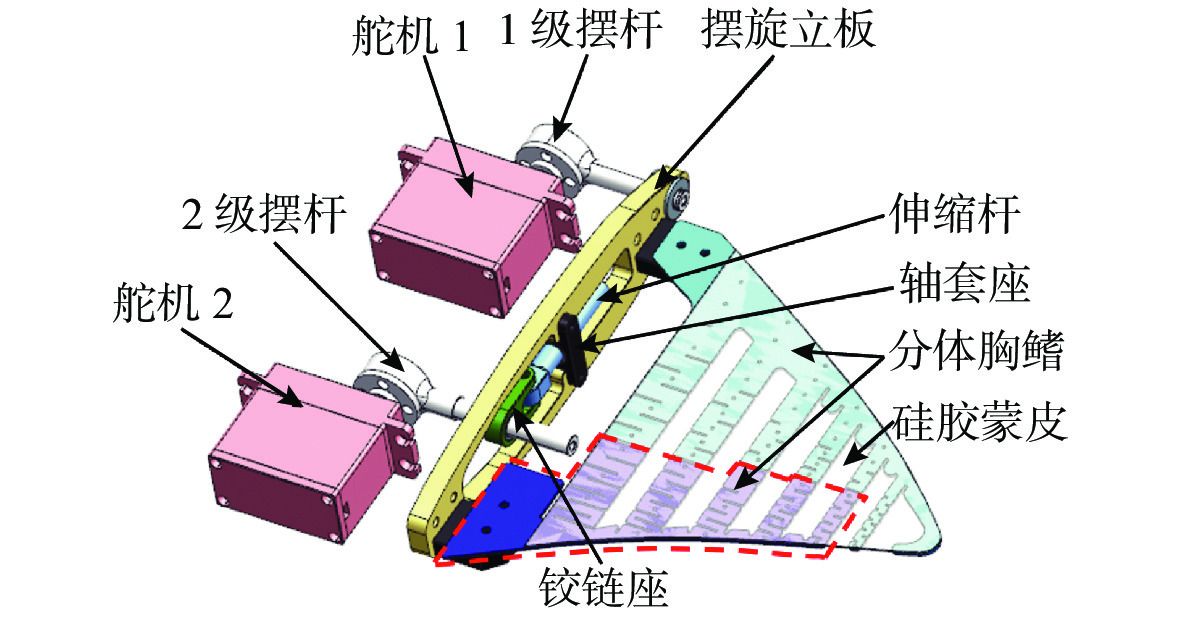
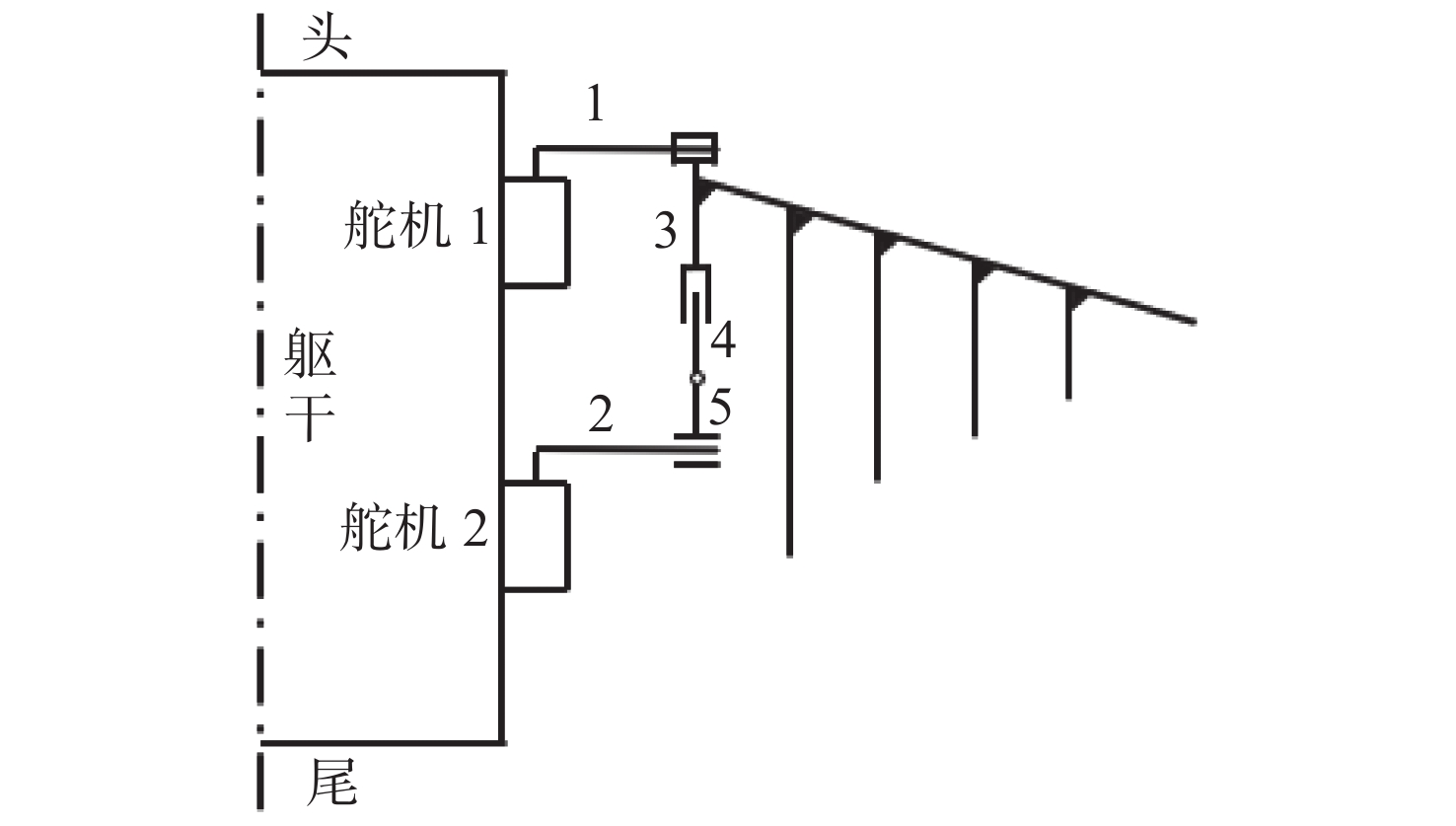
摘要: 现有基于摆动胸鳍推进方式的机器鱼有很多突出特点, 特别是前向游动稳定性, 但倒游性能研究不足, 因此文中针对性地讨论摆动胸鳍推进模式的仿牛鼻鲼机器鱼倒游水动力性能。分别设计了完整胸鳍结构与分体胸鳍结构, 通过对比实验测试验证了分体胸鳍结构较完整胸鳍结构倒游推力的优越性, 通过推力和电流的比值进一步分析能耗转化效率。实验研究了前游和倒游推力与幅值和频率变化之间的关系, 并且通过采集的电流数据, 整理出2种胸鳍结构在前游和倒游工况下的推力等效效率与幅值和频率变化关系曲线; 分析了2种胸鳍结构产生推力及推力等效效率的原因。实验结果表明: 前游工况下, 2种胸鳍推力值接近, 倒游工况下, 随着幅值和频率的增加, 分体胸鳍结构倒游推力增加明显, 最大可达0.22 N; 前游工况下, 分体胸鳍结构推力等效效率较完整胸鳍稍差, 倒游工况下, 随着幅值和频率的增加, 分体胸鳍结构倒游推力等效效率有显著提升。文中对分体胸鳍结构的设计为探究基于摆旋机构推进机器鱼倒游性能提供了参考。Abstract: Robotic fish with pectoral fin swing have many outstanding features, especially forward swimming stability, but the research on their backward swimming performance is insufficient. Therefore, this article specifically discussed the hydrodynamic performance of the robotic cow-nosed ray with backward swimming in pectoral fin swing propulsion mode. Complete pectoral fin and split pectoral fin were designed, and the superiority of split pectoral fin structure over complete pectoral fin structure in terms of backward thrust was verified through experimental testing. The energy conversion efficiency was analyzed through the ratio of thrust to current. According to the collected current data, the equivalent thrust efficiency and amplitude and frequency variation curves of the two pectoral fin structures under forward and backward swimming conditions were drawn. The reasons for the thrust generation and equivalent thrust efficiency of two types of pectoral fin structures were analyzed. The experimental results show that under the forward swimming condition, the two types of pectoral fins have similar thrust values. Under the backward swimming condition, with the increase in amplitude and frequency, the thrust of the split pectoral fin structure increases significantly, reaching a maximum of 0.22 N. Under the forward swimming condition, the split pectoral fin structure is slightly worse than that of a complete pectoral fin. Under the backward swimming condition, with the increase in amplitude and frequency, the equivalent thrust efficiency of the split pectoral fin structure is significantly improved. The design of the split pectoral fin structure in the article provides a reference for exploring the backward swimming performance of robotic fish based on the swing mechanism.
-
Key words:
- cow-nosed ray /
- robotic fish /
- pectoral fin design /
- backward swimming performance
-
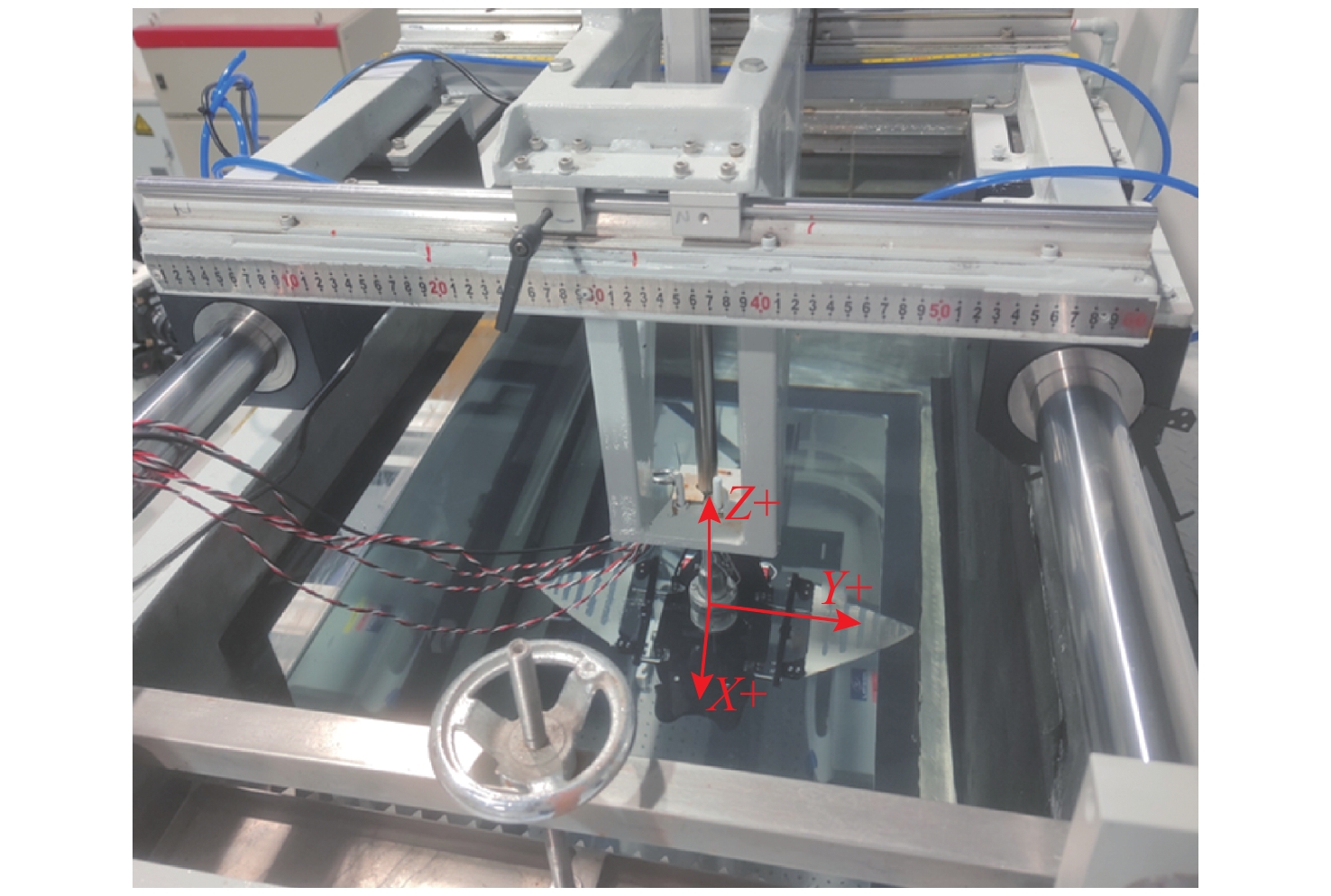
表 1 循环水槽参数
Table 1. Parameters of circulating water tank
流速/(m/s) 精度/(m/s) 0.05~0.5 ±0.01 0.5~1.0 ±0.02 1.0~1.2 ±0.03  下载: 导出CSV
下载: 导出CSV
表 2 六维力/力矩传感器参数
Table 2. Parameters of six dimensional force/torque sensor
传感器型号 量程 分辨率 Fx、Fy/N Fz/N Tx、Ty/Nm Tz/Nm Fx、Fy/N Fz/N Tx、Ty/Nm Tz/Nm SI-125-3 125 500 3 3 1/48 1/16 1/1 320 1/2 640
下载: 导出CSV
表 4 推力等效效率对比
Table 4. Comparison of thrust equivalent efficiency
幅值/(°) 前游等效效率 倒游等效效率 20 

30 

40 
 下载: 导出CSV
下载: 导出CSV
-
[1] 杨少波. 牛鼻鲼泳动动力学分析与仿生机器鱼研究[D]. 长沙: 国防科学技术大学, 2010. [2] 蔡月日, 毕树生. 胸鳍摆动推进模式仿生鱼研究进展[J]. 机械工程学报, 2011, 47(19): 30-37. doi: 10.3901/JME.2011.19.030Cai Yueri, Bi Shusheng. Research advances of bionic fish propelled by oscillating paired pectoral foils[J]. Journal of Mechanical Engineering, 2011, 47(19): 30-37. doi: 10.3901/JME.2011.19.030 [3] 喻俊志, 陈尔奎, 王硕, 等. 仿生机器鱼研究的进展与分析[J]. 控制理论与应用, 2003, 20(4): 485-491.Yu Junzhi, Chen Erkui, Wang Shuo, et al. Research evolution and analysis of biomimetic robot fish[J]. Control Theory & Applications, 2003, 20(4): 485-491. [4] Altringham J D, Ellerby D J. Fish swimming: Patterns in muscle function[J]. Journal of Experimental Biology, 1999, 202(23): 3397-3403. doi: 10.1242/jeb.202.23.3397 [5] Cai Y, Bi S, Zheng L. Design optimization of a bionic fish with multi-joint fin rays[J]. Advanced Robotics, 2012, 26: 1-2,177-196. doi: 10.1163/016918611X607356 [6] Bi S, Cai Y. Effect of spanwise flexibility on propulsion performance of a flapping hydrofoil at low Reynolds number[J]. Chinese Journal of Mechanical Engineering, 2012, 25(1): 12-19. doi: 10.3901/CJME.2012.01.012 [7] 高俊, 毕树生, 李吉, 等. 胸鳍扑翼式机器鱼的设计及水动力实验[J]. 北京航空航天大学学报, 2011, 37(3): 344-350.Gao Jun, Bi Shusheng, Li Ji, et al. Design and hydrodynamic experiments on robotic fish with oscillation pectoral fins[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(3): 344-350. [8] Gao J, Bi S, Xu Y, et al. Development and design of a robotic manta ray featuring flexible pectoral fins[C]//IEEE International Conference on Robotics & Biomimetics. Sanya, China: IEEE, 2008. [9] Cai Y, Chen L, Bi S, et al. Bionic flapping pectoral fin with controllable spatial deformation[J]. Journal of Bionic Engineering, 2019(16): 916-930. [10] 邢城. 柔性胸尾鳍对仿蝠鲼潜航器运动性能影响的实验研究[D]. 西安: 西北工业大学, 2021. [11] 沈林成, 王光明. 仿鱼长鳍波动推进器研究的进展与分析[J]. 国防科技大学学报, 2005, 27(4): 96-100. doi: 10.3969/j.issn.1001-2486.2005.04.022Shen Lincheng, Wang Guangming. The progress and analysis of the research on the underwater biomimetic propulsor employing the long-fin undulations[J]. Journal of National University of Defense Technology, 2005, 27(4): 96-100. doi: 10.3969/j.issn.1001-2486.2005.04.022 [12] 伍志军. 基于晶吻鳐的波动推进数值模拟及其实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2015. [13] 范增, 王扬威, 刘凯, 等. 仿生机器鱼胸鳍波动与摆动融合推进机制建模及实验研究[J]. 水下无人系统学报, 2019, 27(2): 166-173.Fan Zeng, Wang Yangwei, Liu Kai, et al. Modeling and experimental research of integrating propulsion mechanism of pectoral fin’s fluctuation and swing for the biomimetic robotic fish[J]. Journal of Unmanned Undersea Systems, 2019, 27(2): 166-173. [14] Zhou C L, Low K H. Better endurance and load capacity: an improved design of manta ray robot(RoMan-II)[J]. Journal of Bionic Engineering, 2010, 7(4): S137-S144. [15] Fish F E, Schreiber C M, Moored K W, et al. Hydrodynamic performance of aquatic flapping: Efficiency of underwater flight in the manta[J]. Aerospace, 2016, 3(3): 20. doi: 10.3390/aerospace3030020 [16] Schaefer J T, Summers A P. Batoid wing skeletal structure: Novel morphologies, mechanical implications, and phylogenetic patterns[J]. Journal of Morphology, 2005, 264(3): 298-313. doi: 10.1002/jmor.10331 [17] Curet O M, Patankar N A, Lauder G V, et al. Mechanical properties of a bio-inspired robotic knifefish with an undulatory propulsor[J]. Bioinspiration & Biomimetics, 2011, 6(2): 026004. [18] Salazar R, Fuentes V, Abdelkefi A. Classification of biological and bioinspired aquatic systems: A review[J]. Ocean Engineering, 2018, 148: 75-114. doi: 10.1016/j.oceaneng.2017.11.012 [19] Menzer A, Gong Y, Fish F E, et al. Bio-inspired propulsion: Towards understanding the role of pectoral fin kinematics in manta-like swimming[J]. Biomimetics, 2022, 7(2): 45. doi: 10.3390/biomimetics7020045 [20] Wu Y T. Swimming of a waving plate[J]. Journal of Fluid Mechanics, 1961, 10(3): 321-344. doi: 10.1017/S0022112061000949 -








 点击查看大图
点击查看大图
图(10) / 表(4)
计量
- 文章访问数: 735
- HTML全文浏览量: 24
- PDF下载量: 31
- 被引次数: 0




