

Quantitative Analysis of Uncertainty at the End of the Towed Cable in Underwater Towing Systems
-
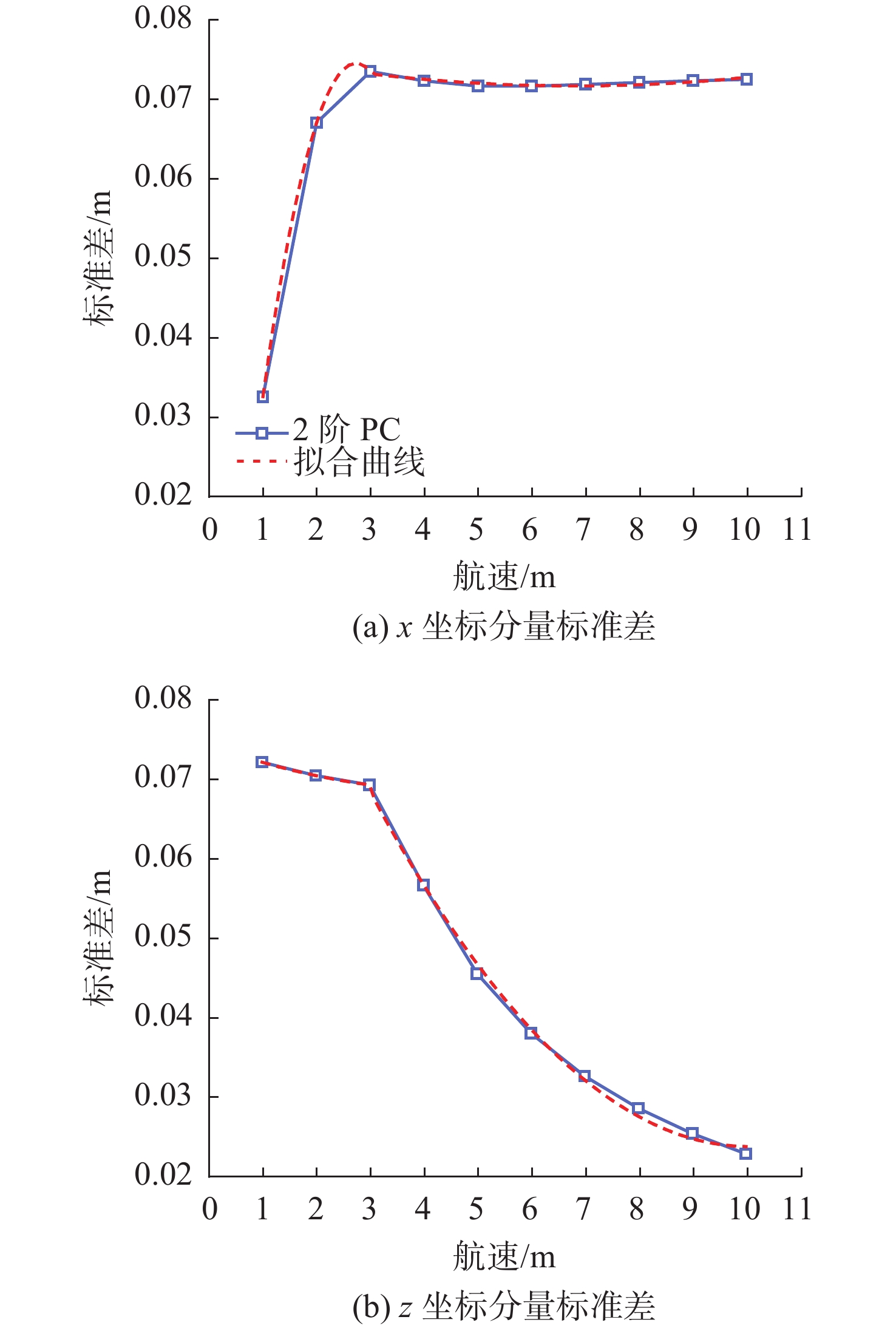
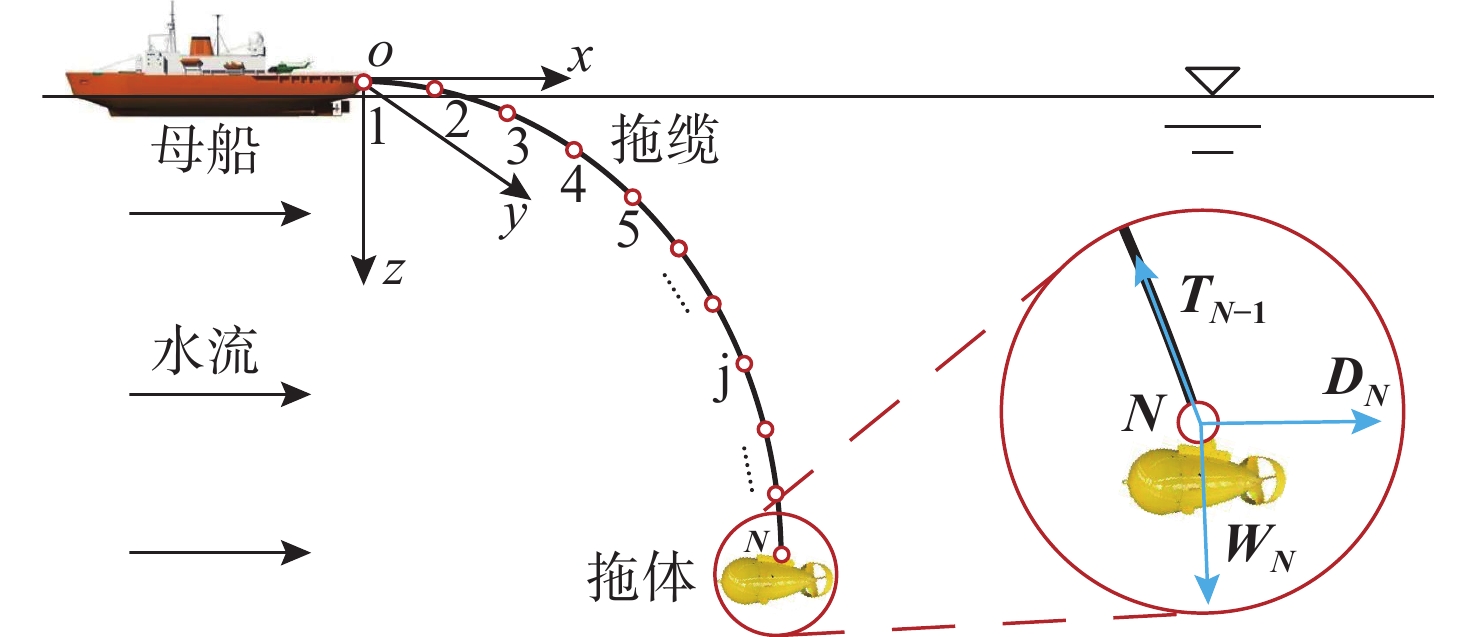
摘要: 在多变的海洋环境中, 水下拖曳系统拖缆优化设计与拖体精确控制的关键在于拖缆末端不确定性的量化。针对传统不确定性量化方法蒙特卡罗(MC)法计算成本高、精度低的问题, 提出一种基于多项式混沌(PC)的拖缆末端不确定性量化方法。利用拉丁超立方采样获取拖缆参数的样本集, 并代入集中质量法模型求得拖缆末端位置坐标。通过PC方法生成拖缆末端响应的代理模型, 根据正交多项式的特点量化拖缆末端的不确定性, 同时与MC方法进行对比。结果表明: 相比于MC方法, PC方法的计算结果关于样本数量的收敛速度更快, 精度更高; 运动响应不确定性与拖缆轴向长度近似正比例关系; 缆长增大将导致末端的不确定性增大, 且增大趋势逐渐平缓; 拖缆参数不确定性一定时, 增大母船航速有助于提高拖体在高度上的稳定性。PC方法的准确性和高效性得到验证。同时, 拖缆末端不确定性量化分析结果可为相关工程问题提供指导。Abstract: In the ever-changing marine environment, the key to the optimal design of the towed cable and the precise control of the towed body in the underwater towing system is the quantification of uncertainty at the end of the towed cable. The Monte Carlo(MC) method, a traditional uncertainty quantification method, has high computation costs and low accuracy. In view of this, a method of uncertainty quantization at the end of a towed cable based on polynomial chaos(PC) was proposed. Latin hypercube sampling was used to obtain sample sets of the towed cable parameters, and the sample sets were substituted into the lumped-mass method model to obtain the coordinate of the end position of the towed cable. A proxy model of the end response of the towed cable was generated by the PC method, and the uncertainty of the end was quantified according to the characteristics of the orthogonal polynomials. At the same time, the results of the PC method were compared with those of the MC method. The results show that compared with the MC method, the PC method has a faster convergence speed in terms of sample size and higher accuracy. The uncertainty of motion response is approximately proportional to the axial length of the towed cable; the increase in cable length leads to the increase in uncertainty at the end, and the increasing trend is gradually flattened. When the uncertainty of the towed cable parameters is constant, increasing the speed of the mother ship helps to improve the stability of the towed body at height. The accuracy and efficiency of the PC method have been verified. Meanwhile, the quantitative analysis results of the uncertainty at the end of the towed cable guide engineering problems.
-
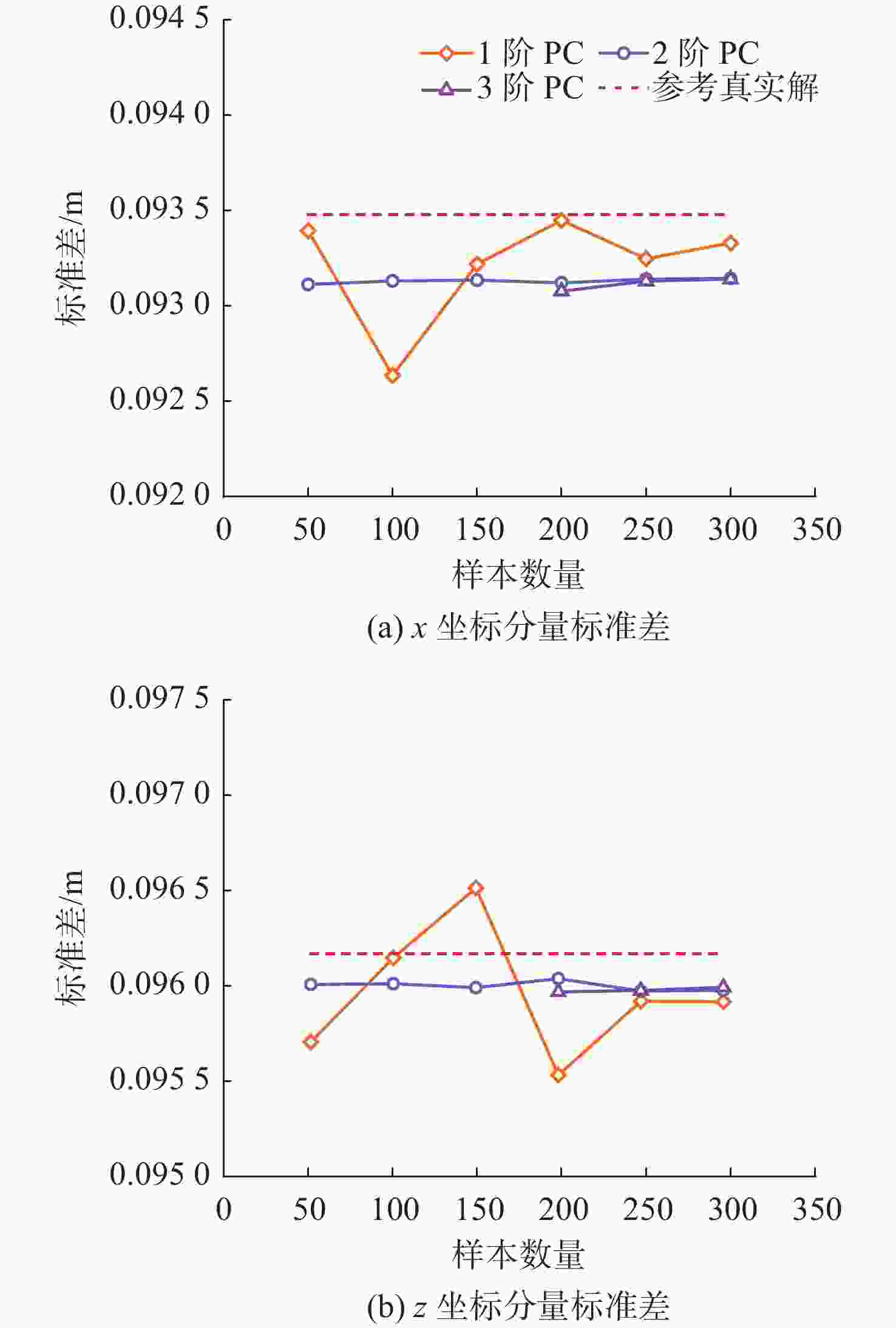
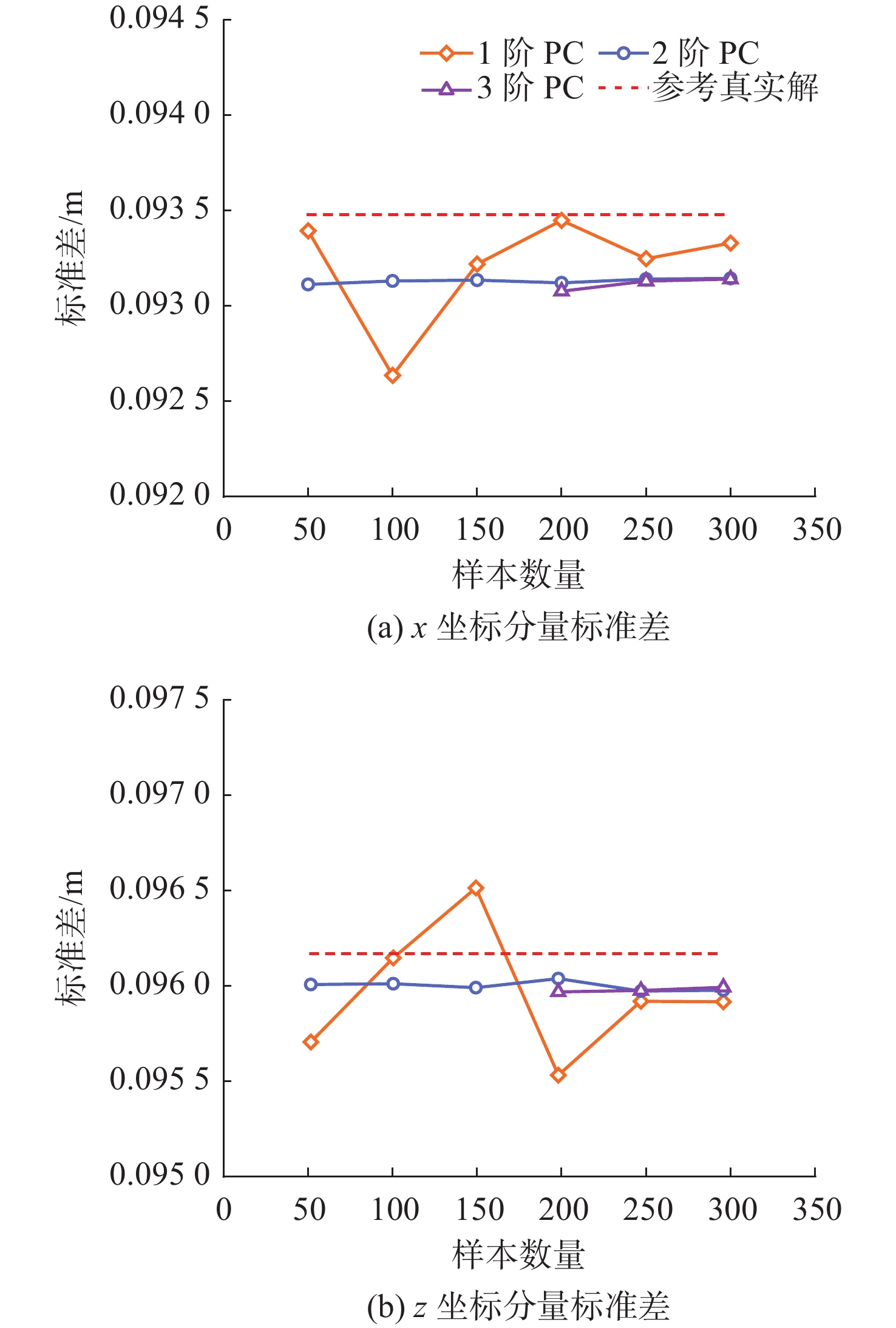
图 2 末端质点坐标分量标准差计算结果
Figure 2. Calculation results of standard deviation of end particle coordinate components

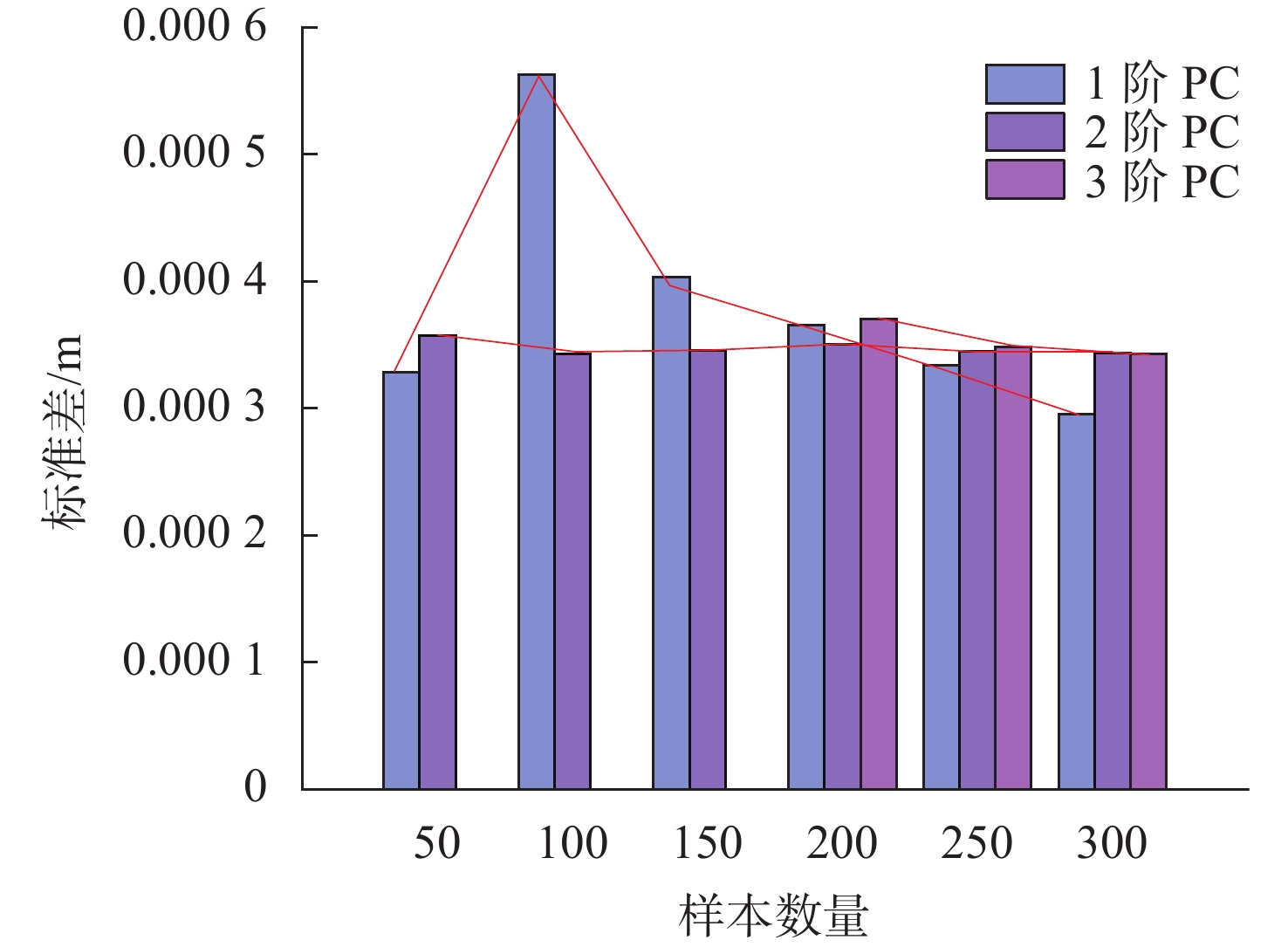
图 3 误差指标随基函数阶数和样本数量的变化
Figure 3. Variation of error with order of basis function and number of samples
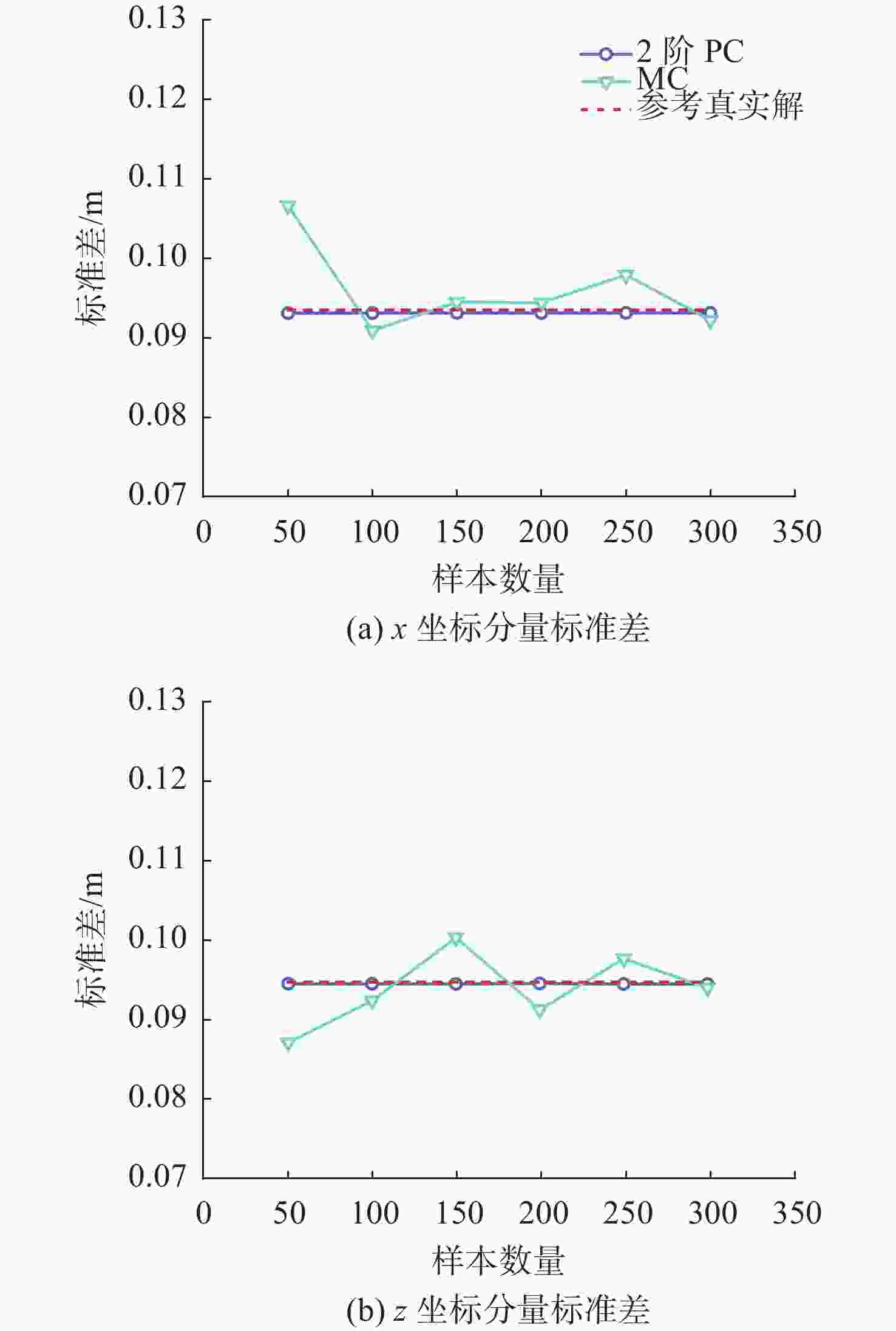
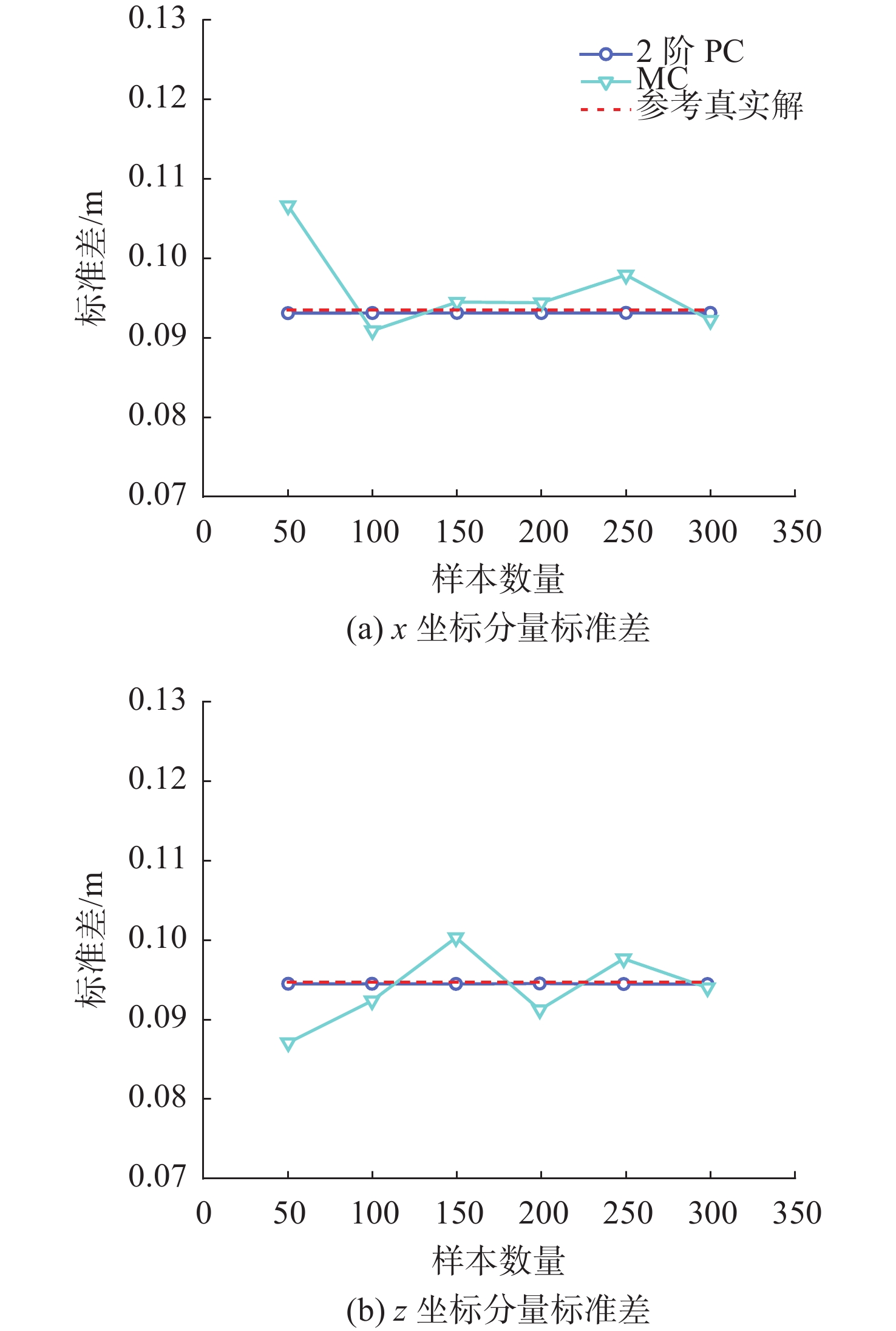
图 4 PC方法与MC方法末端质点坐标分量标准差计算结果
Figure 4. Comparison of calculation results of standard deviation of end particle coordinate components between PC method and MC method
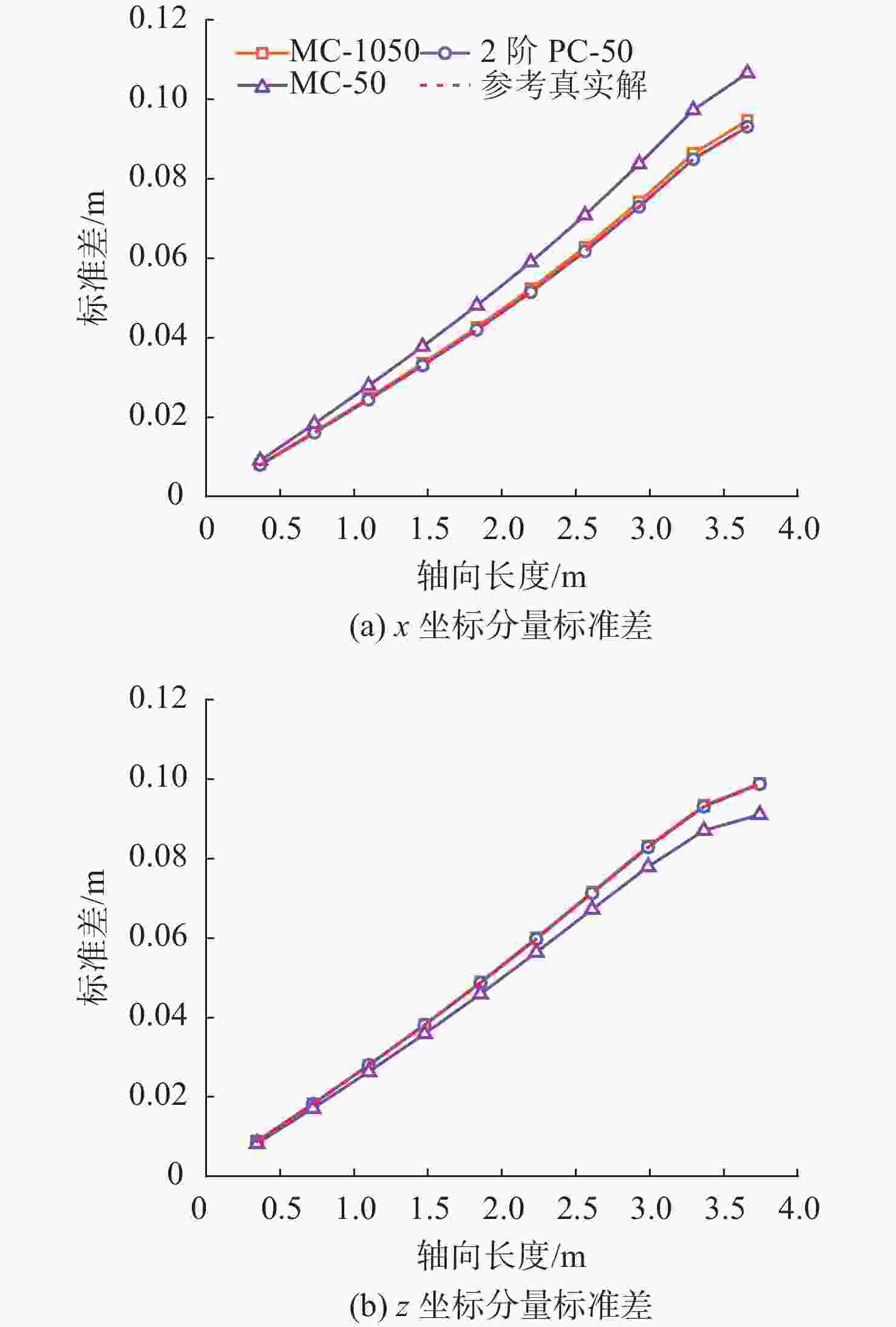
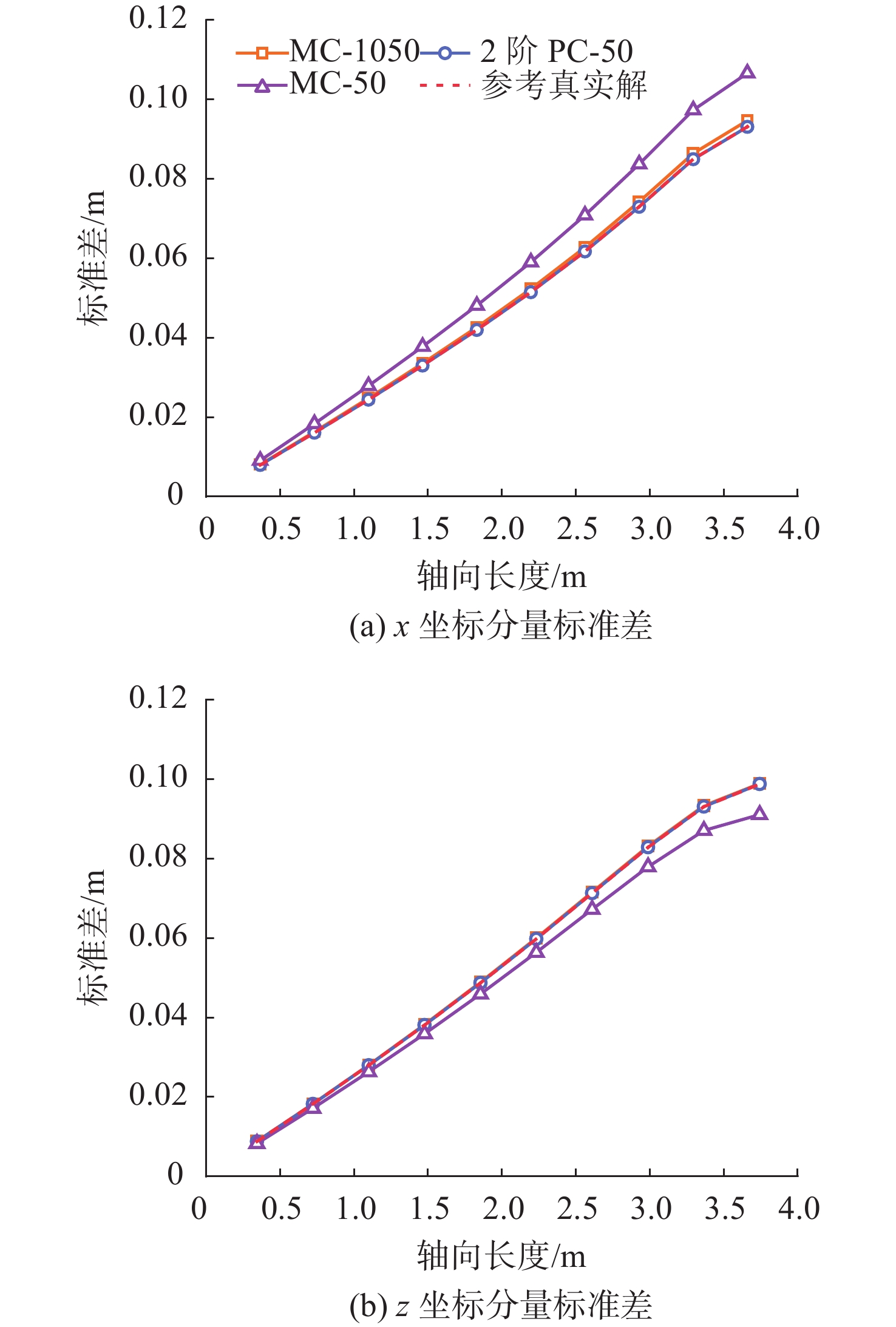
图 5 末端质点标准差随轴向长度变化曲线
Figure 5. The standard deviation of the end particle changes with axial lengths

图 6 末端质点标准差随缆长变化曲线
Figure 6. Standard deviation of end particle changes with cable lengths
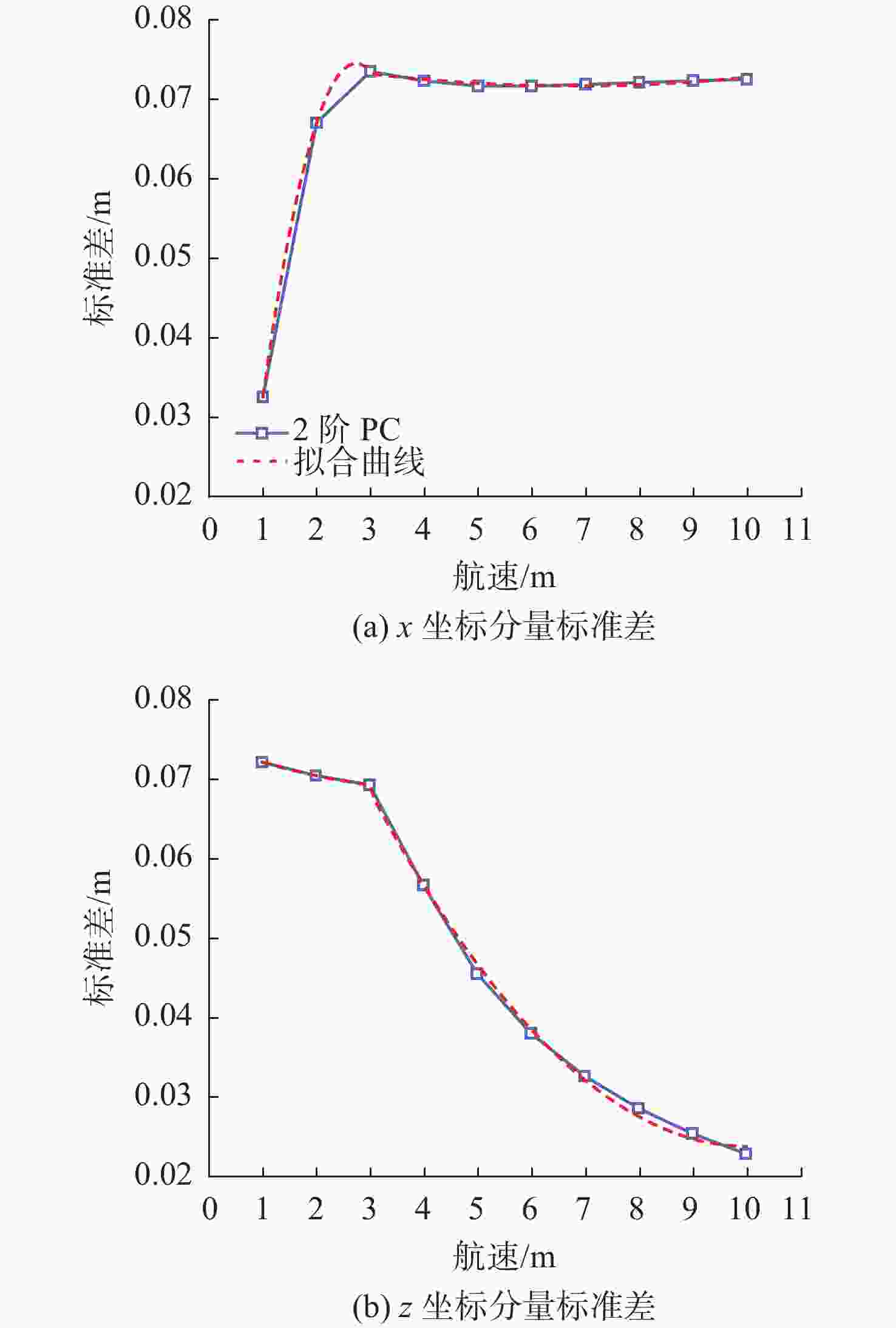
图 7 末端质点标准差随母船航速变化曲线
Figure 7. The standard deviation of the end particle changes with the speeds of the mother ship
表 1 不确定性量化考虑的8个主要输入参数
Table 1. Eight main input parameters considered for uncertainty quantification
变量 拖缆参数 数值 x1 缆长/m 3.66 x2 直径/m 0.003 05 x3 切向阻尼系数 0.051 1 x4 法向阻尼系数 1.2 x5 线密度/(kg/m) 0.4 x6 水流速率/(m/s) 1.542 x7 液体密度/(kg/m3) 1 024 x8 重力加速度/(m/s2) 9.8  下载: 导出CSV
下载: 导出CSV
表 2 拖缆参数分布
Table 2. Distributions of towed cable parameters
变量 分布 x1/m x1~N(3.66, 5.36×10−3) x2/m x2~N(3.05×10−3, 8.37×10−9) x3 x3~N (5.11×10−2, 2.35×10−6) x4 x4~N (1.2, 1.30×10−3) x5/(kg/m) x5~N (4×10−1, 1.44×10−4) x6/(m/s) x6~N (1.542, 2.14×10−3) x7/(kg/m3) x7~N (1.024×103, 9.44×102) x8/(m/s2) x8~N (9.8, 8.64×10−4)
下载: 导出CSV
-
[1] 吴静波, 程淑萍, 赵鹏铎. 基于长基线和超短基线联合的拖曳目标定位技术[J]. 中国舰船研究, 2019, 14(1): 156-161.Wu Jingbo, Cheng Shuping, Zhao Pengduo. Towed target positioning technology based on long baseline and ultra-short baseline combination[J]. Chinese Journal of Ship Research, 2019, 14(1): 156-161. [2] 王飞, 丁伟, 邓德衡, 等. 水下多缆多体拖曳系统运动建模与模拟计算[J]. 上海交通大学学报, 2020, 54(5): 441-450.Wang Fei, Ding Wei, Deng Deheng, et al. Motion modeling and numerical simulation study of multi-cable multi-body towed system[J]. Journal of Shanghai Jiao Tong University, 2020, 54(5): 441-450. [3] 张丹, 梁建通, 宋海升, 等. 水下拖曳系统临界运动特性快速确定方法[J]. 水下无人系统学报, 2022, 30(2): 165-169.Zhang Dan, Liang Jiantong, Song Haisheng, et al. Rapid determination method of critical motion condition of underwater towing systems[J]. Journal of Unmanned Undersee Systems, 2022, 30(2): 165-169. [4] 陈家瑞, 申和平, 张咏鸥, 等. 水下拖曳系统姿态建模与快速预报[J/OL]. 武汉理工大学学报(交通科学与工程版): 1-8. [2024-01-24]. http://kns.cnki.net/kcms/detail/42.1824.U.20230227.1915.006.html.Chen Jiarui, Shen Heping, Zhang Yongou, et al. Attitude modeling and rapid prediction of underwater towed system[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering Edition): 1-8. [2024-01-24]. http://kns.cnki.net/kcms/detail/42.1824.U.20230227.1915.006.html. [5] 侯二虎, 杜敏, 汪小勇, 等. 水下拖曳航行器水动力和拖缆姿态仿真分析[J]. 海洋开发与管理, 2020, 37(2): 74-77.Hou Erhu, Du Min, Wang Xiaoyong, et al. Simulation analysis of hydrodynamics of underwater towing aircraft and the attitude of towed cable[J]. Ocean Development and Management, 2020, 37(2): 74-77. [6] 刘铭, 李家旺, 朱克强. 基于集中质量法的水下拖曳缆索动力响应分析[J]. 水道港口, 2017, 38(4): 405-411.Liu Ming, Li Jiawang, Zhu Keqiang. Dynamic response analysis of the undersea towed cable based on lump-mass method[J]. Journal of Waterway and Harbor, 2017, 38(4): 405-411. [7] 孙小帅, 马骋, 钱正芳, 等. 波浪中水面船舶与拖曳系统耦合运动特性计算方法研究[J]. 中国造船, 2022, 63(5): 71-81.Sun Xiaoshuai, Ma Cheng, Qian Zhengfang, et al. Numerical research on couped motions of surface vessel and towing system in waves[J]. Shipbuilding of China, 2022, 63(5): 71-81. [8] 朱艳杰, 朱克强, 杨冰卡, 等. 基于凝集质量法的海洋缆索动力学建模与仿真技术[J]. 海洋工程, 2014, 32(1): 112-116.Zhu Yanjie, Zhu Keqiang, Yang Bingka, et al. Dynamics modeling and evaluation technique of the marine cable considering tension and compression bending torsion deformation[J]. The Ocean Engineering, 2014, 32(1): 112-116. [9] 王飞. 各向异性弯矩扭矩作用下导流缆运动建模与仿真[J]. 哈尔滨工程大学学报, 2013, 34(5): 549-554, 561.Wang Fei. Modeling and simulation of faired cable with anisotropic bending moment and torque[J]. Journal of Harbin Engineering University, 2013, 34(5): 549-554, 561. [10] 胡军, 张树道. 基于多项式混沌的全局敏感度分析[J]. 计算物理, 2016, 33(1): 1-14.Hu Jun, Zhang Shudao. Global sensitivity analysis based on polynomial chaos[J]. Chinese Journal of Computational Physics, 2016, 33(1): 1-14. [11] 方开翔, 刘炳霞, 赵琦. 拖缆涡激振动计算及分析[J]. 江苏科技大学学报(自然科学版), 2005, 19(6): 70-74.Fang Kaixiang, Liu Bingxia, Zhao Qi. Calculation and research of vortex induced vibration in towed array sonar[J]. Journal of Jiangsu University of Science and Technology(Natural Science Edition), 2005, 19(6): 70-74. [12] 邵校, 刘祚秋. 基于非线性有限元法的二维水下拖缆研究[J]. 船舶标准化工程师, 2015, 48(2): 63-68.Shao Xiao, Liu Zuoqiu. Research of two dimensional underwater towed cable based on nonlinear finite element[J]. Ship Standardization Engineer, 2015, 48(2): 63-68. [13] 孙洪波, 施朝健, 林文锦. 船-缆拖曳系统操纵性能分析[J]. 船舶力学, 2015, 19(11): 1325-1333.Sun Hongbo, Shi Chaojian, Lin Wenjin. Analysis of maneuverability of towing cable ship system[J]. Journal of Ship Mechanics, 2015, 19(11): 1325-1333. [14] 邓卫华, 向晗, 冯大奎, 等. 考虑气液两相的拖曳系统收放缆分析[J]. 中国造船, 2022, 63(3): 249-258.Deng Weihua, Xiang Han, Feng Dakui, et al. Analysis of retracting and releasing cable in towing system considering gas-liquid two phase medium[J]. China Shipbuilding, 2022, 63(3): 249-258. [15] 张锦, 邓玉聪, 郑孝彬, 等. 近水面拖曳浮标测试系统运动特性研究[J]. 舰船科学技术, 2023, 45(4): 133-138.Zhang Jin, Deng Yucong, Zheng Xiaobin, et al. Research on the motion characteristics of near-water towed buoy rest system near the water surface[J]. Ship Science and Technology, 2023, 45(4): 133-138. [16] 王飞, 涂卫民, 邓德衡, 等. 水下双阵列拖曳系统缆破断情况下的运动响应[J]. 上海交通大学学报, 2020, 54(2): 211-220.Wang Fei, Tu Weimin, Deng Deheng, et al. Research on motion characteristics of near-water towed buoy test system[J]. Journal of Shanghai Jiao Tong University, 2020, 54(2): 211-220. [17] 朱克强, 李道根, 李维扬. 海洋缆体系统的统一凝集参数时域分析法[J]. 海洋工程, 2002, 20(2): 100-104.Zhu Keqiang, Li Daogen, Li Weiyang. Lumped-parameter analysis method for time-domain of ocean cable-body systems[J]. The Ocean Engineering, 2002, 20(2): 100-104. [18] 李志彤, 董凌宇, 陆凯, 等. 深海拖曳系统水下控制技术研究[J]. 海洋地质前沿, 2023, 39(3): 30-39.Li Zhitong, Dong Lingyu, Lu Kai, et al. Research on underwater control technology of deep-sea towing system[J]. Marine Geology Frontiers, 2023, 39(3): 30-39. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 30
- HTML全文浏览量: 5
- PDF下载量: 9
- 被引次数: 0




