Abstract:
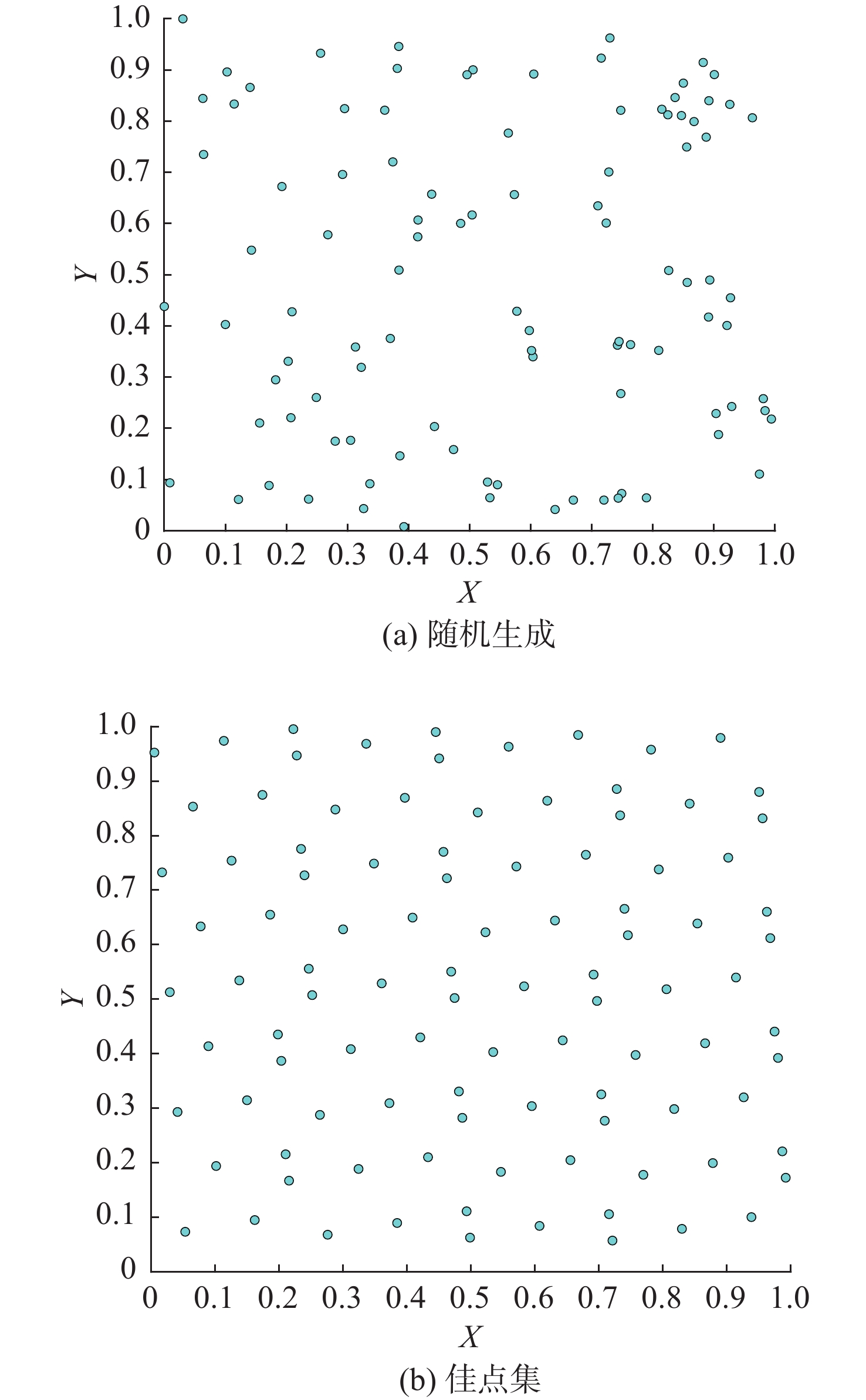
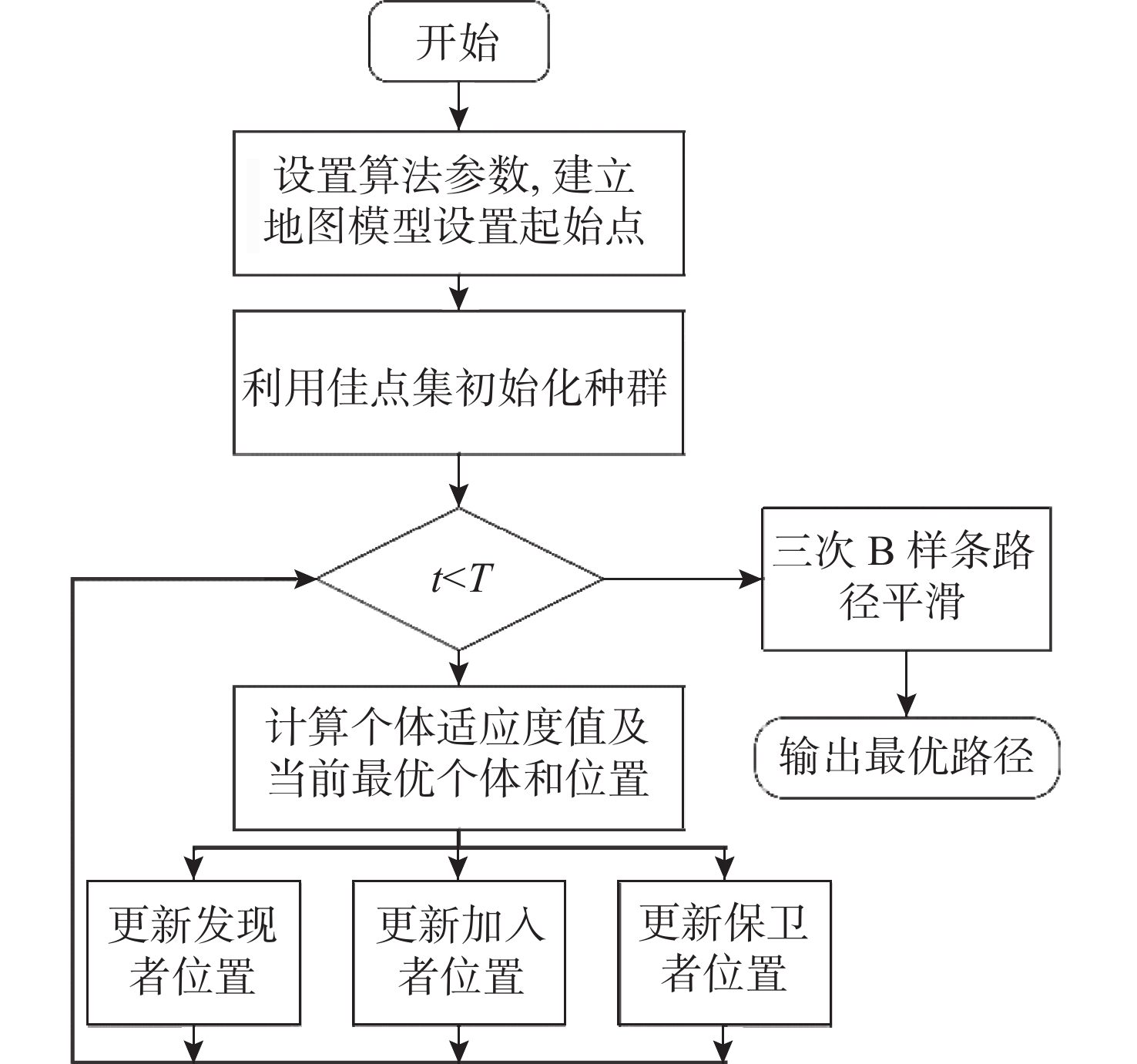
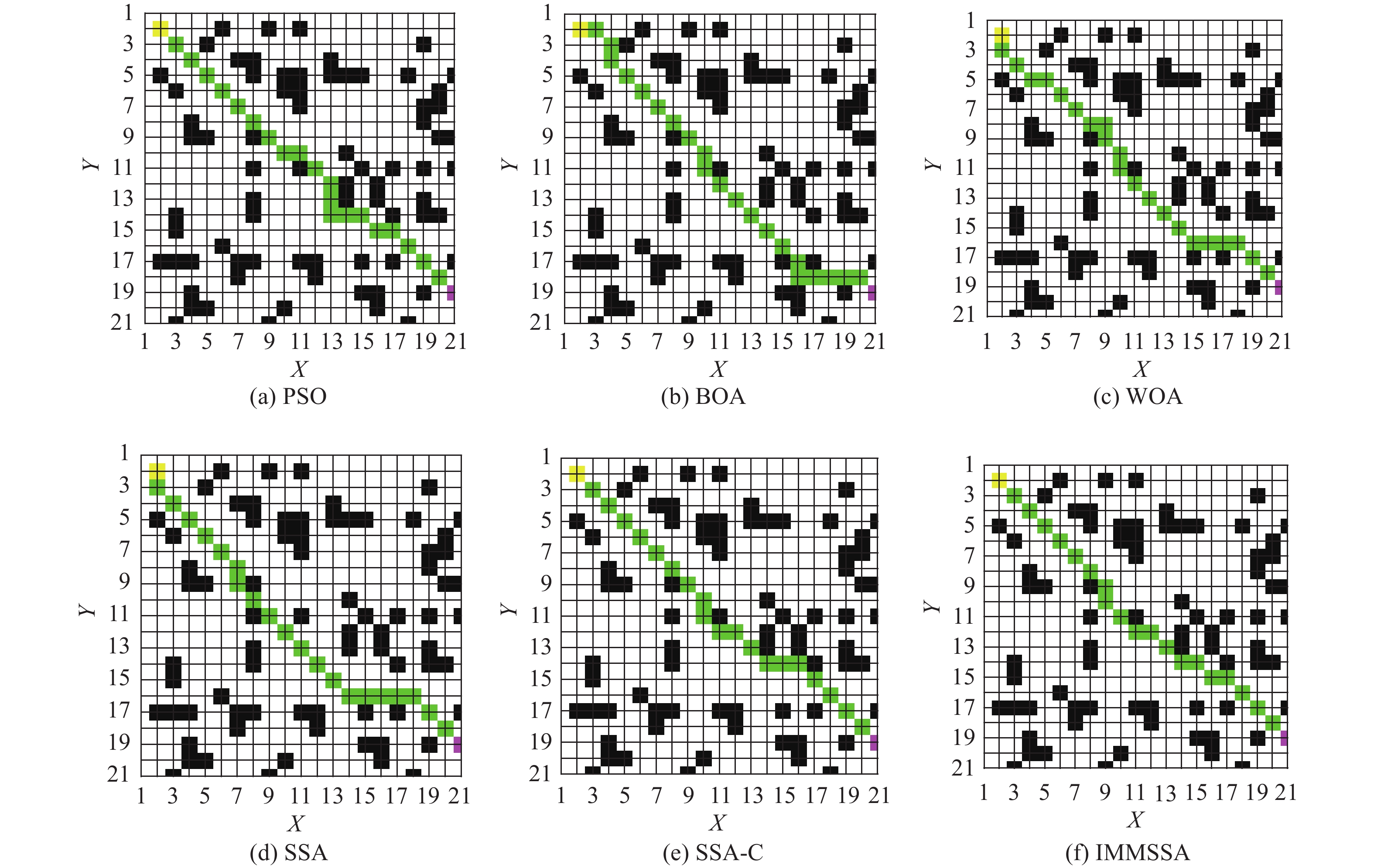
Path planning for underwater remotely operated vehicles(ROVs) is a prerequisite for underwater inspection operation of hydropower plants. The reservoir of hydropower plants has complex environments, and the existing path planning algorithms face the problems of long planning time, poor stability of algorithms, easy fall into the local optimum, and unsmooth path generation. In view of these issues, this paper put forward a ROV path planning method for hydropower plants based on the improved hybrid motion sparrow search algorithm. Firstly, the good point set was introduced to improve the sparrow population initialization method, which enhanced the population diversity; secondly, the hybrid motion strategy was proposed to optimize the sparrow population position updating method, increasing the algorithm’s convergence accuracy and stability; then, the multivariate objective function, which contained time cost, path threat, current disturbance, and penalty function, was established by combining with the actual engineering problems and considering the factors of large flow velocity of reservoirs, strong magnetic field, obstacles, and cost; finally, the triple B-spline interpolation was used to obtain the optimal smooth path. The simulation results show that compared with other path planning algorithms, the proposed method performs better in terms of computational accuracy, convergence speed, and stability, and it is suitable for underwater inspection tasks of hydropower plants.



 Taobao
Taobao
 Micro
Micro