Abstract:
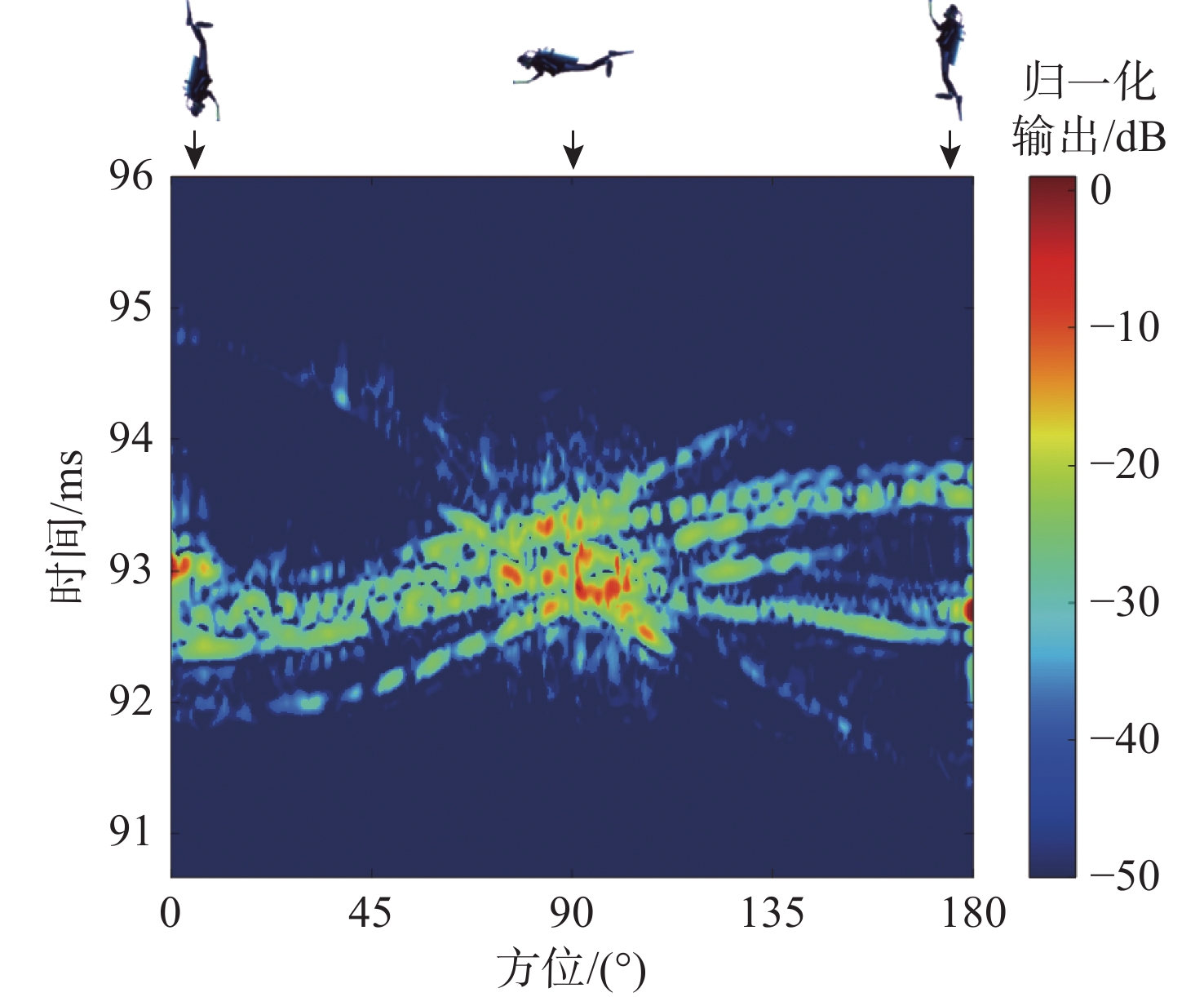
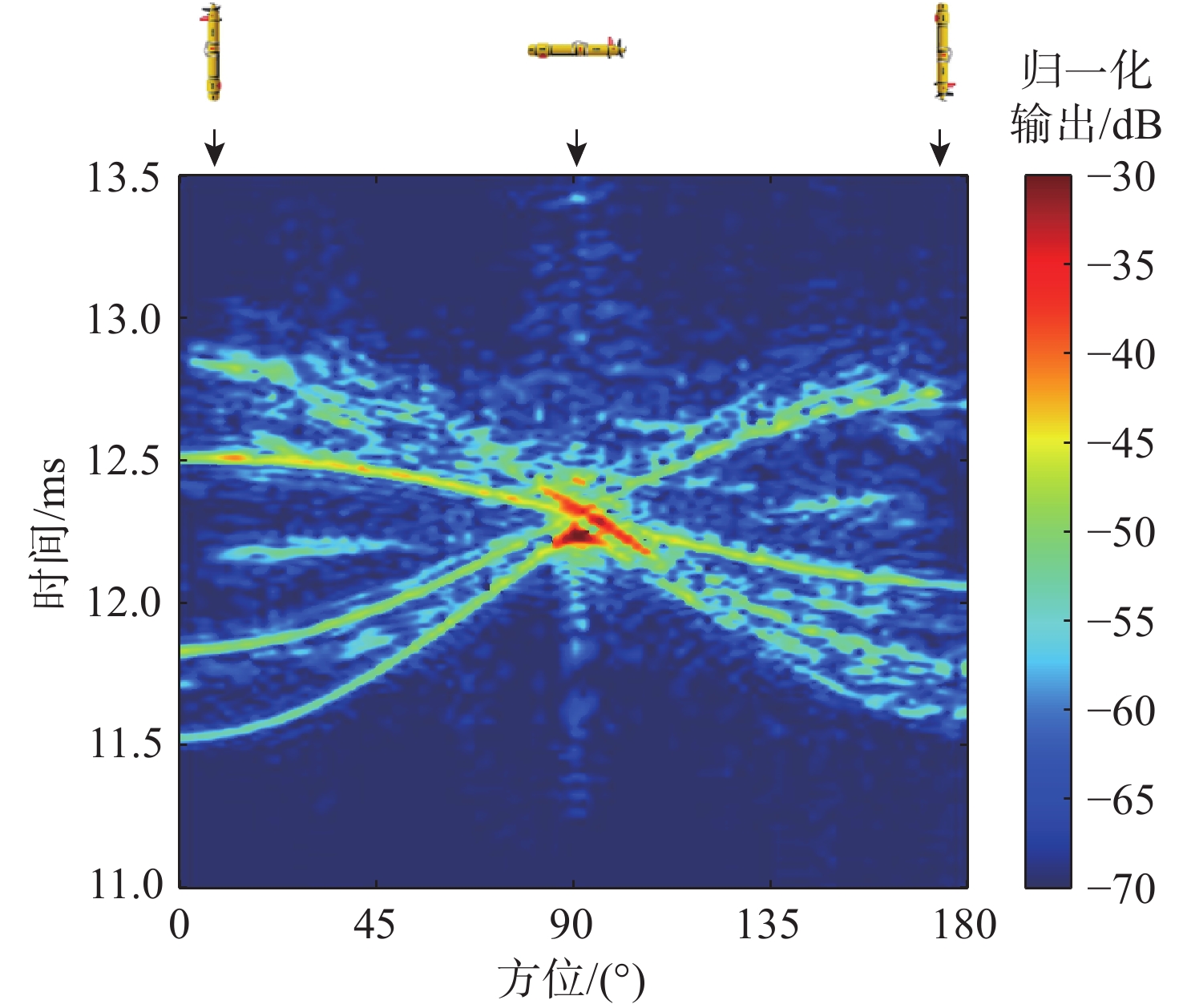
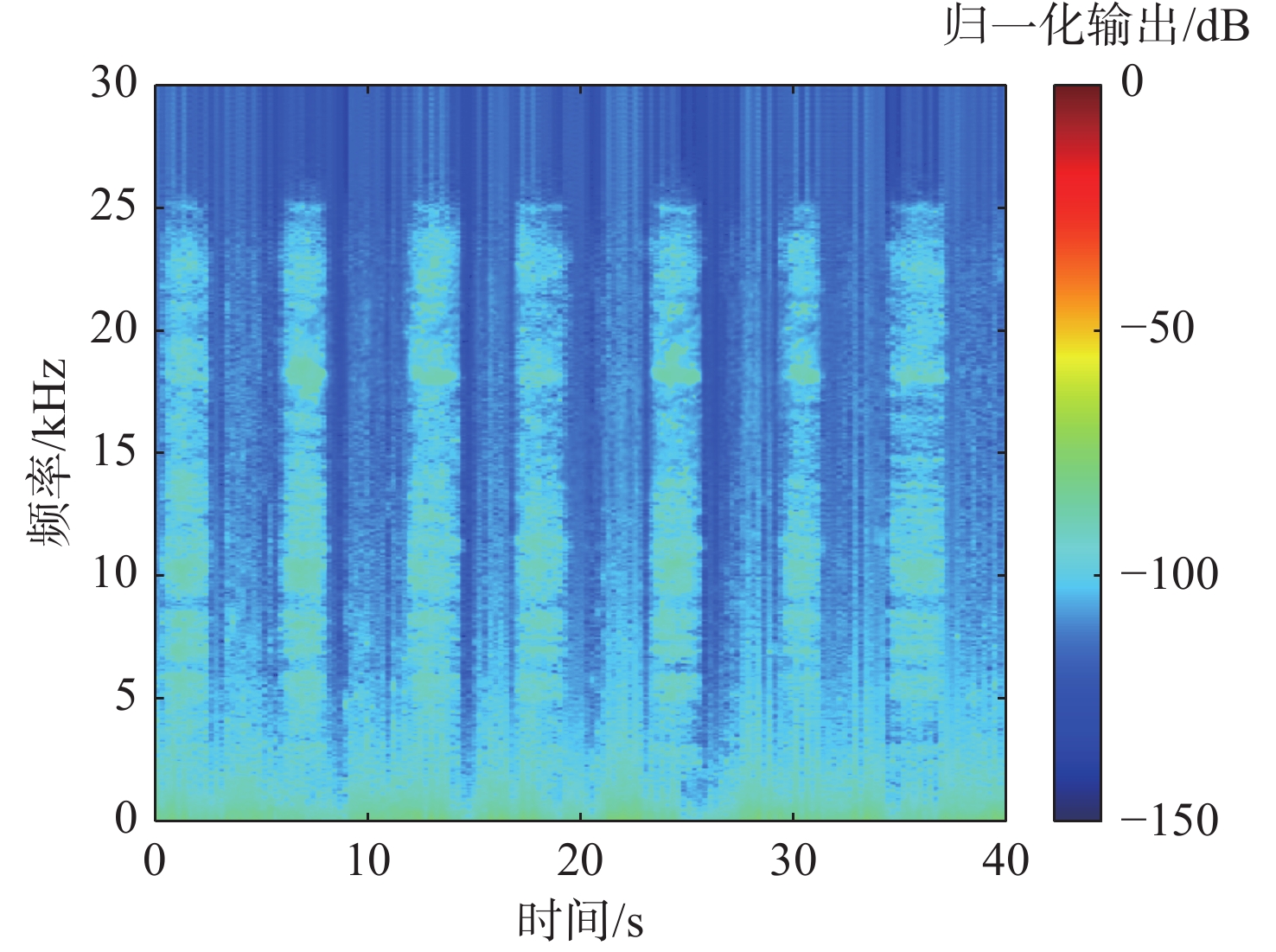
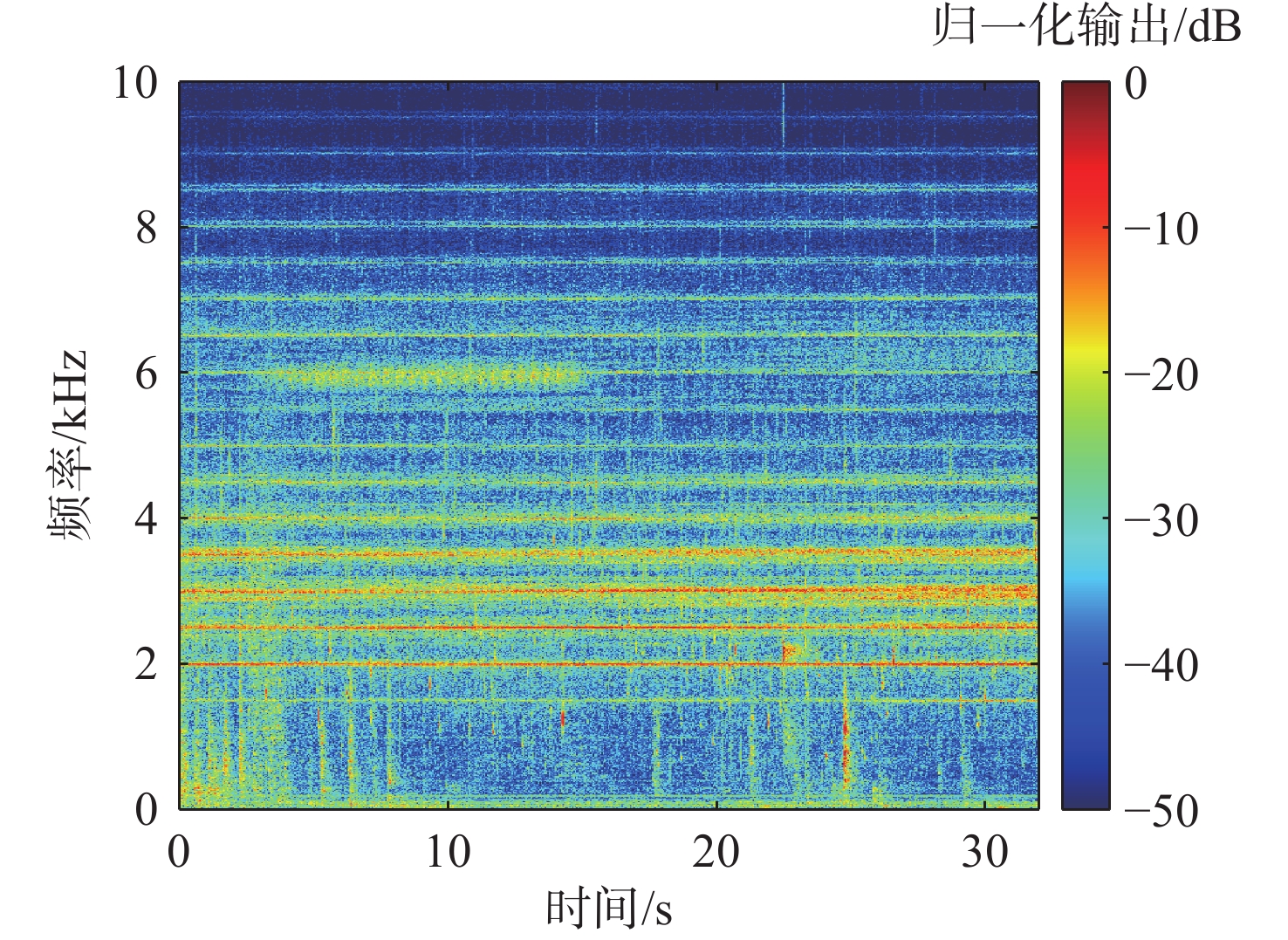
Research on the acoustic scattering characteristics of small underwater targets provides a fundamental physical basis for active sonar target detection, identification, and security applications and has significant application value in shallow-water security, mine countermeasures, and underwater engineering detection. This paper reviewed the progress in theoretical modeling, experimental measurements, and engineering applications for three representative classes of small underwater targets: divers and their propulsion devices, unmanned undersea vehicles(UUVs), and mines. First, the scope of the review was defined by combining the normalized size parameter with the functional attributes of the targets, and the fundamental features of different scattering regions were outlined. Then, representative studies on the modeling, experiments, and applications of these three types of targets were systematically summarized. Research indicates that diver targets exhibit significant multi-component coupling and time-varying modulation characteristics, with exhaled bubbles, the lungs, and diving equipment serving as the main contributors to acoustic scattering. The scattering of UUVs is greatly affected by hull structures, the flooding state of internal compartments, and multiple scattering from appendages. Echoes from buried mines are jointly governed by target elasticity, interface wave propagation, and coupling with sediment layers. Current research still faces several challenges, including insufficient understanding of target scattering and propagation coupling mechanisms in complex marine environments, the difficulty of balancing accuracy and efficiency in broadband scattering prediction, inadequate integration of scattering mechanisms with data-driven recognition, and limited experimental validation under complex field conditions. This review is expected to provide a reference for understanding the acoustic scattering mechanisms of small underwater targets and for improving their detection and application.