Abstract:
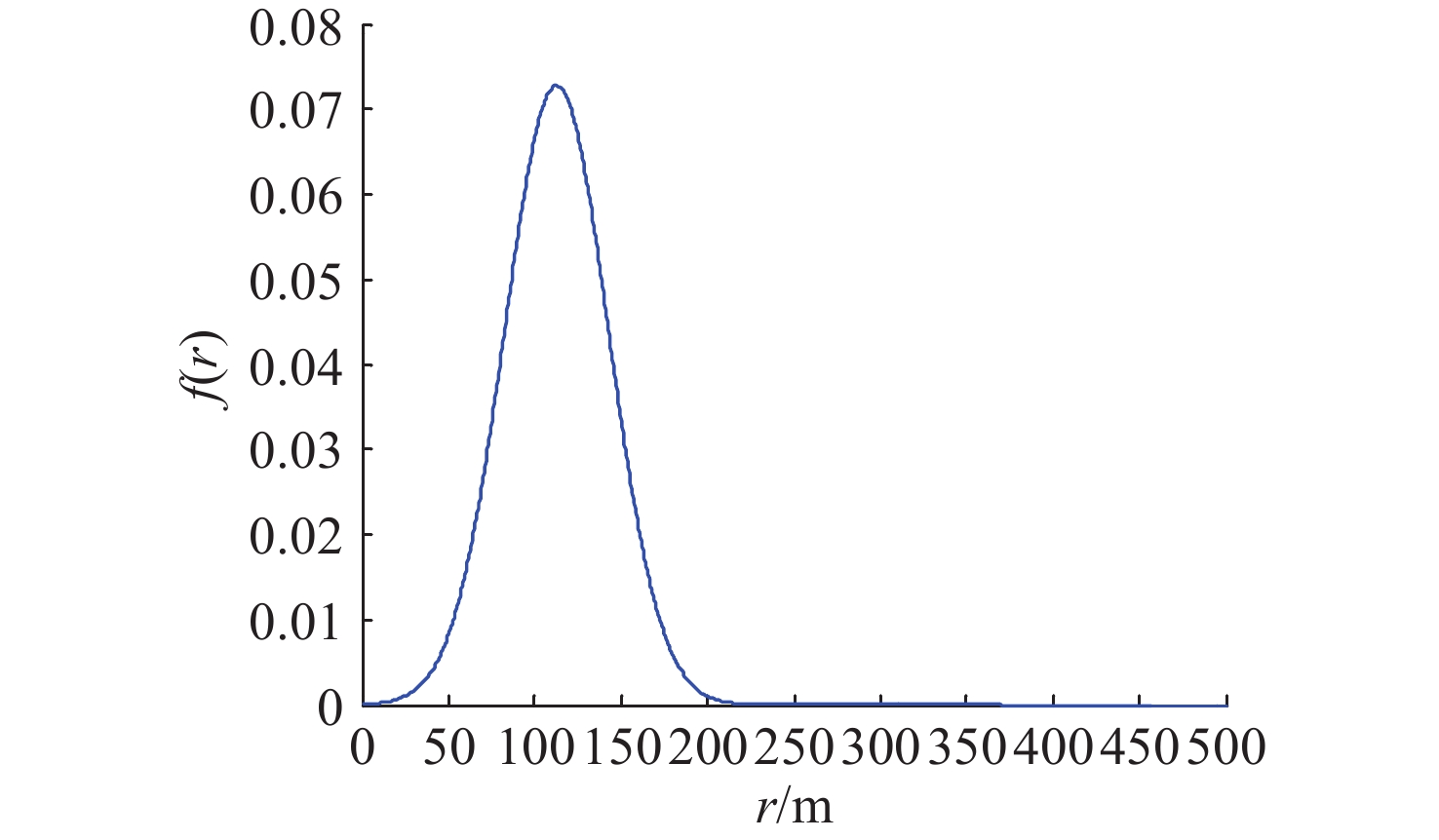
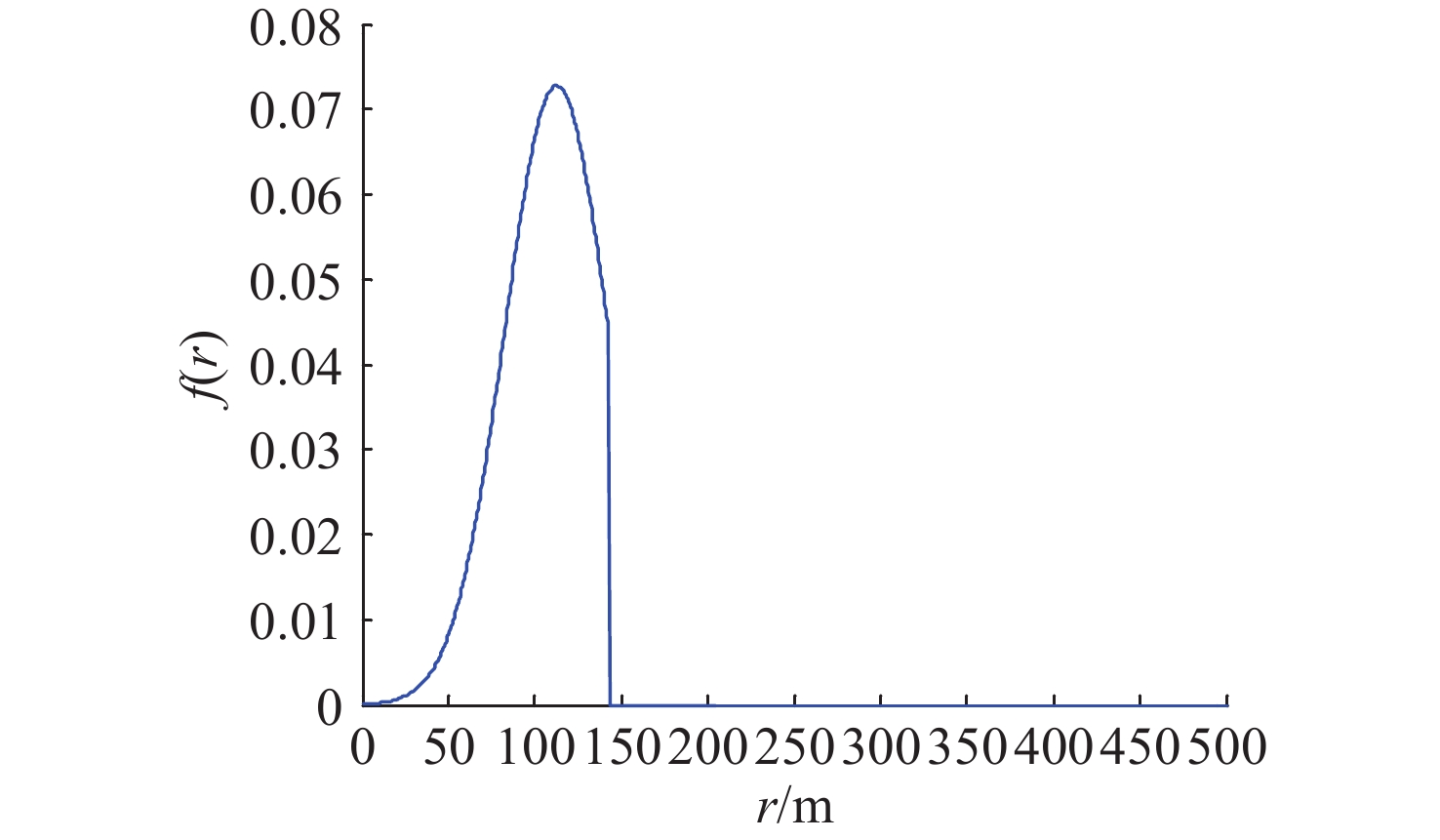
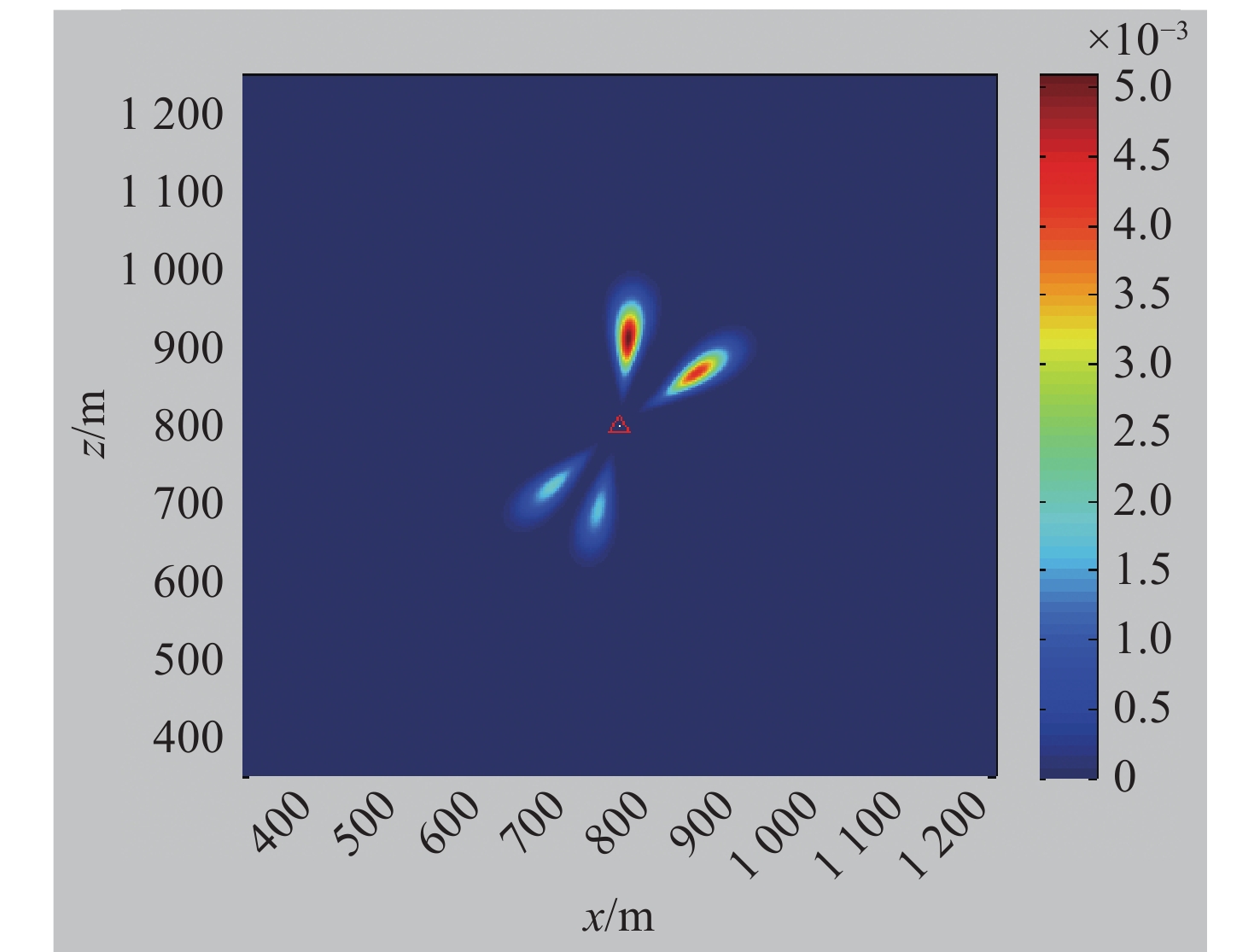
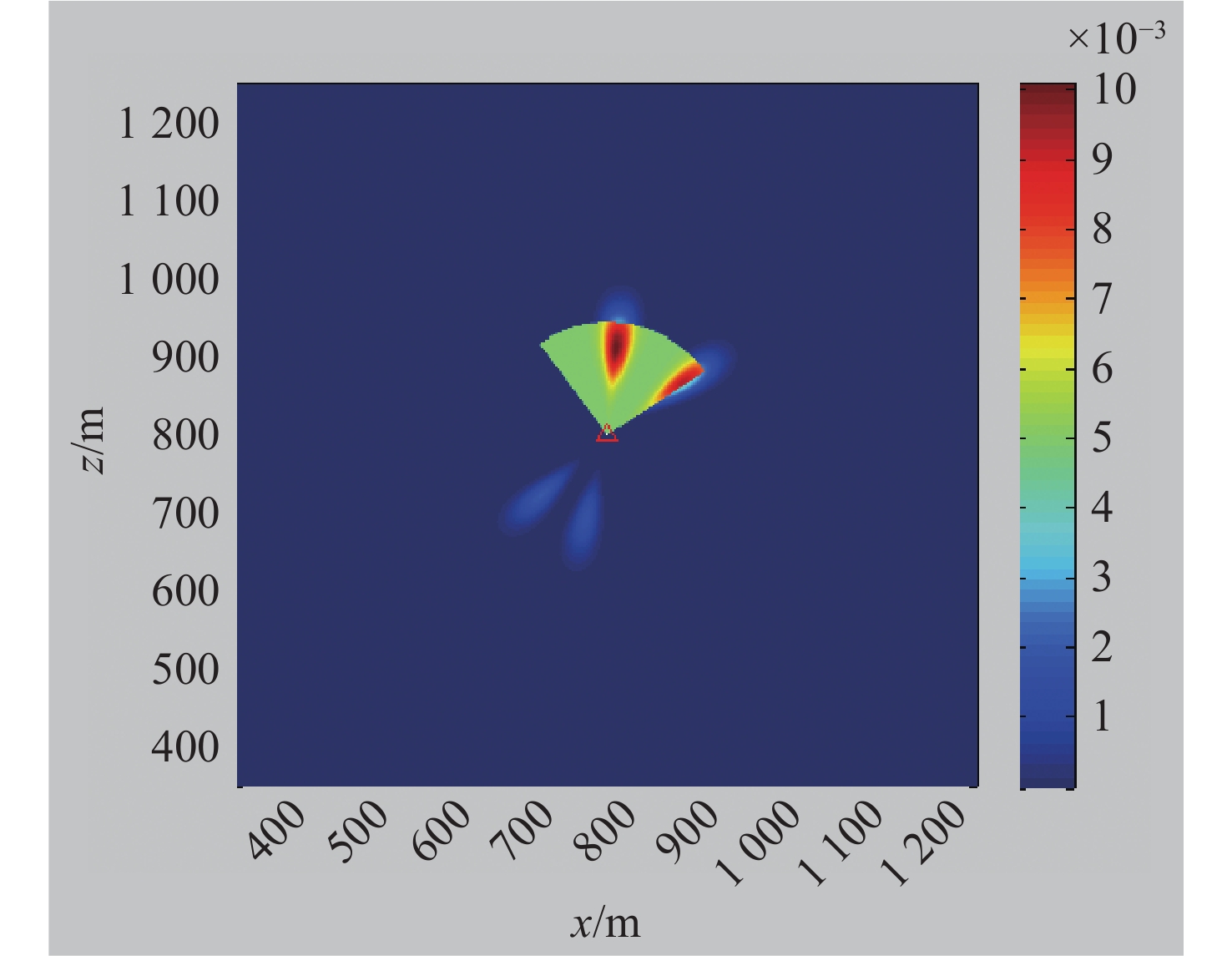
To address the high multi-vessel coordination cost, limited timeliness, and stringent constraints of tethered operations in near-bottom monitoring of the touchdown point(TDP) during deepwater pipeline laying, an integrated monitoring architecture comprising an unmanned surface vehicle(USV), a towed/telemetry module(TMS), and an autonomous/remote underwater vehicle(ARV) is developed, together with a vertical underwater wireless optical communication(UWOC) scheme. A vertical UWOC approach based on quasi-omnidirectional LED array emission and adaptive receive-threshold control is proposed and evaluated. First, depth-dependent absorption and scattering attenuation coefficients are established from the chlorophyll concentration profile; under Lambertian, quasi-omnidirectional LED-array boundary conditions, Monte Carlo photon tracing with the Henyey–Greenstein(HG) phase function is introduced to overcome the bias of the constant-parameter Beer–Lambert approximation in spatially varying media, yielding the spatial distribution of received power and the 90% confidence coverage radius. Second, a hardware–software integrated implementation is completed: the transmitter employs blue/green LED arrays with secondary optics, the receiver adopts a large-aperture photomultiplier tube(PMT) with a narrowband filter, and OOK/IM-DD is used as the signaling scheme. At the software layer, a sliding-window adaptive threshold and gain control method(CFAR+AGC) jointly adjusts transmit power and receive gain, reducing reliance on high-precision pointing, acquisition, and tracking (PAT). Water-tank experiments verify link stability, pointing tolerance, and multi-rate performance(6~20 Mbps); open-sea trials in the Wenchang 16-2 field achieve a stable communication range of approximately 17 m under a water attenuation coefficient of 0.58 m−1, with error-free transmission at 6.25 Mbps and robustness to relative motion and ambient-light fluctuations. The results demonstrate that the proposed closed-loop “layered channel–quasi-omnidirectional emission–adaptive reception” approach has strong transferability and engineering effectiveness, enabling continuous deepwater TDP monitoring without additional MSV deployment, thereby reducing cost and improving operational safety and timeliness.