

Experimental Study on Sailing Resistance and Attitude of Amphibious Unmanned Vehicles Under Still Water Towing Conditions
-
摘要: 静水阻力拖曳试验是评估水陆两栖无人车水动力性能的重要手段, 目前针对水陆两栖车航行阻力的静水拖曳试验流程及机理尚缺乏系统性研究。文中以某型水陆两栖无人车为试验对象, 基于其几何参数和设定的试验工况, 依托船模拖曳水池试验装置制定了规范化的试验步骤, 定量表征了不同拖曳速度和不同尾翼板安装角度下的流体动力性能。结合试验观测现象和数据集, 重点分析了航速与尾翼板安装角度变化对航行阻力特性、升沉运动响应及纵倾姿态的影响规律, 为水陆两栖无人车水动力性能优化提供了试验依据和工程参考。Abstract: The still water resistance towing test is an important method for evaluating the hydrodynamic performance of amphibious unmanned vehicles. Currently, there is a lack of systematic research on the still water towing test procedure and the underlying mechanisms of sailing resistance for amphibious vehicles. In this paper, a certain type of amphibious unmanned vehicle was taken as the test object. Based on its geometric parameters and the defined test conditions, a standardized test procedure was established using a ship model towing tank facility, and the hydrodynamic performance under different towing speeds and different stern flap installation angles was quantitatively characterized. Based on the observed experimental phenomena and the dataset, the effects of variations in speed and stern flap installation angle on sailing resistance characteristics, heave motion response, and trim attitude were analyzed in detail, providing experimental evidence and engineering reference for the hydrodynamic performance optimization of amphibious unmanned vehicles.
-
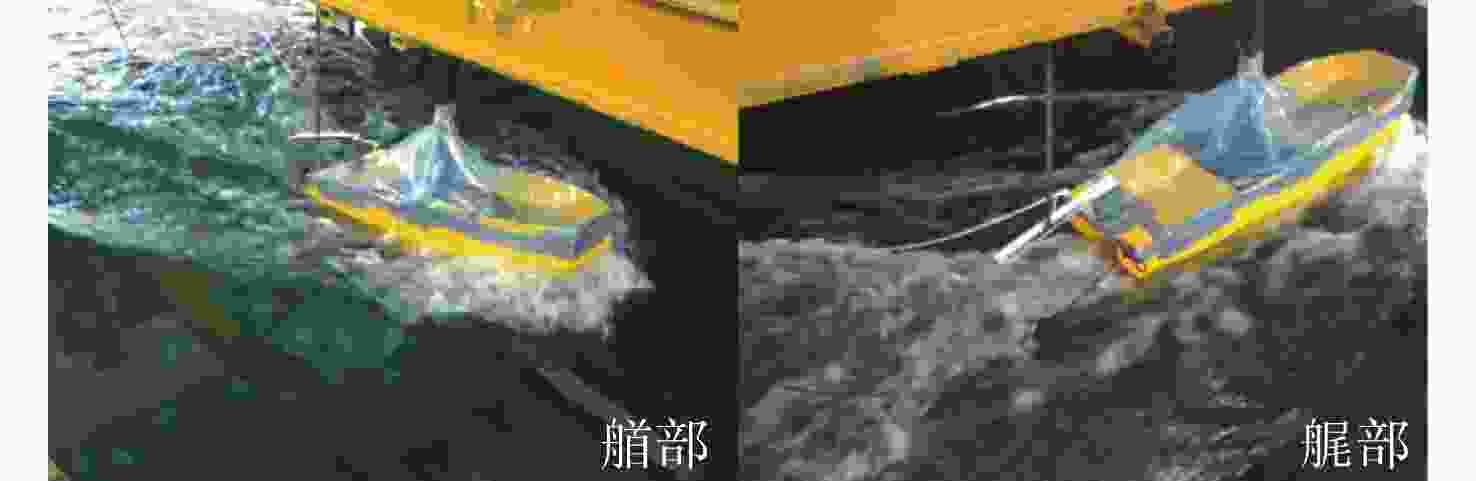
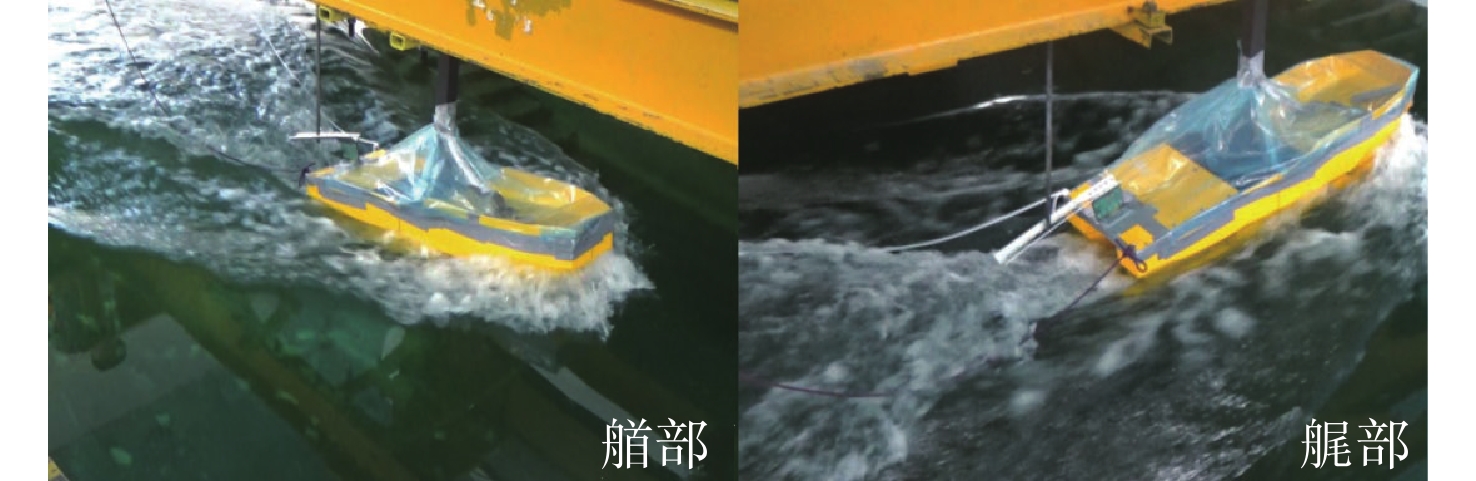
图 4 工况A-1下水陆两栖无人车艏艉状态
Figure 4. Bow and stern state of the amphibious unmanned vehicle under working condition A-1
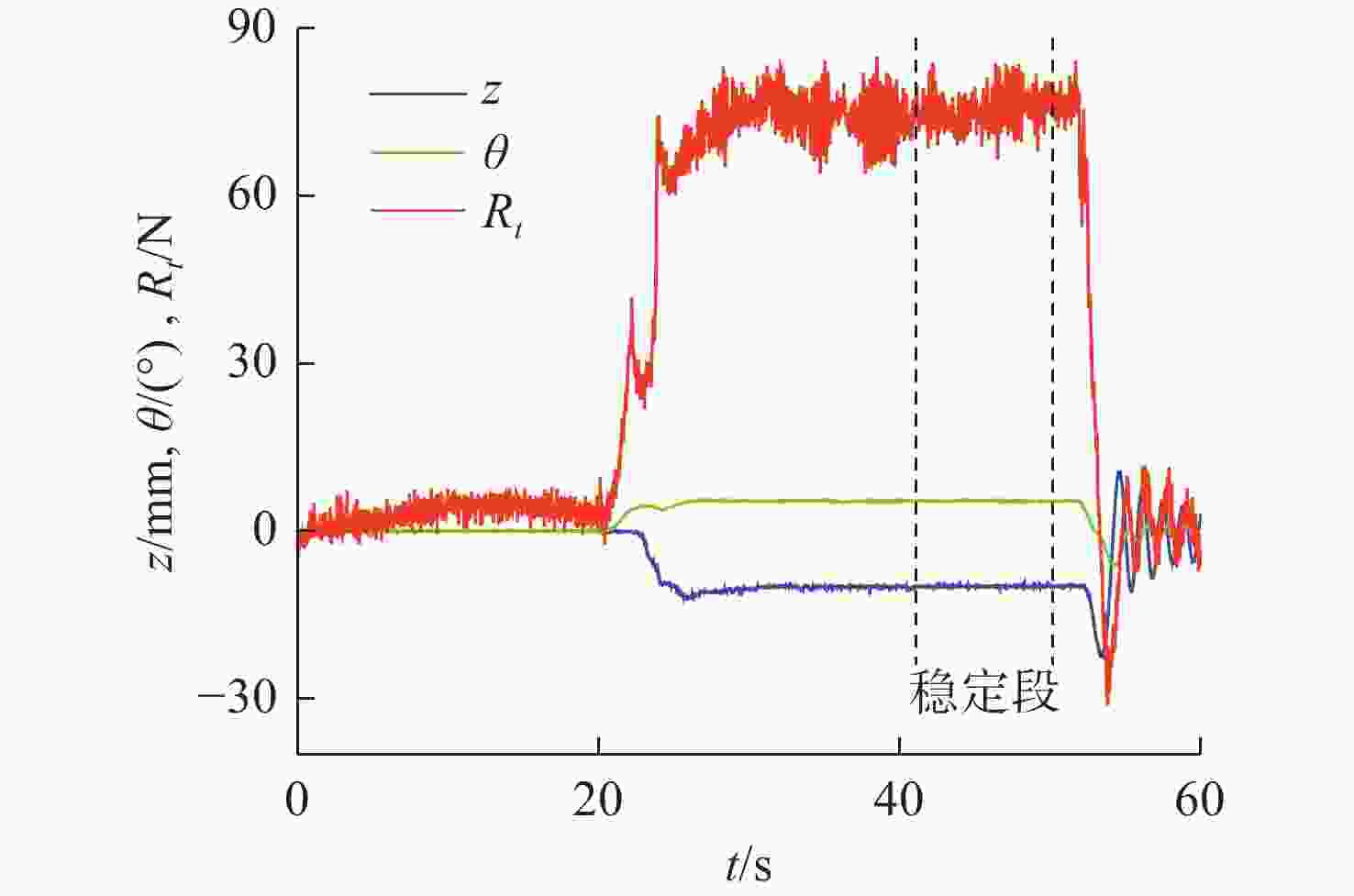
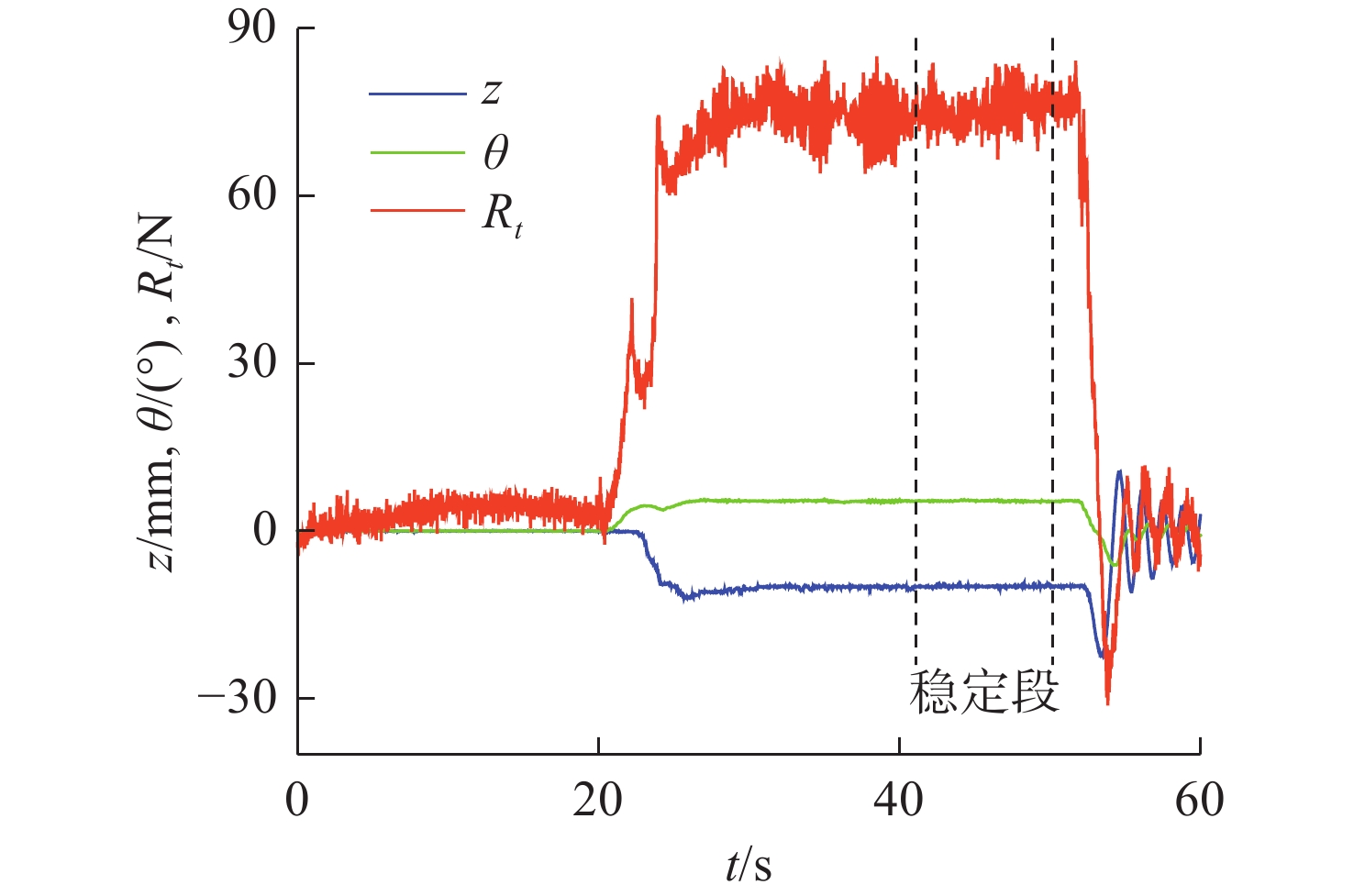
图 5 工况A-1下水动力参数时历曲线
Figure 5. Time-history curves of hydrodynamic parameters uder working condition A-1
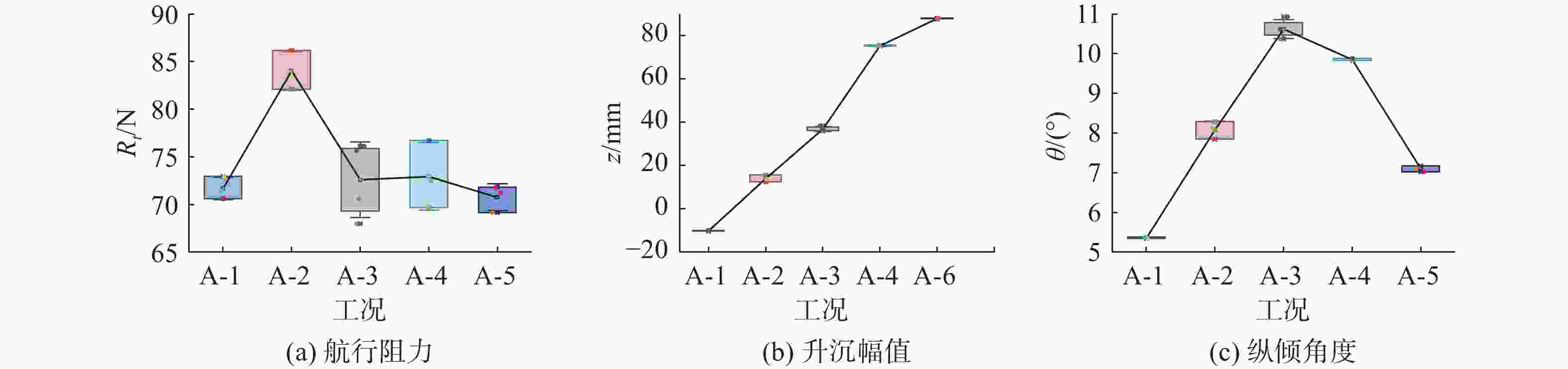
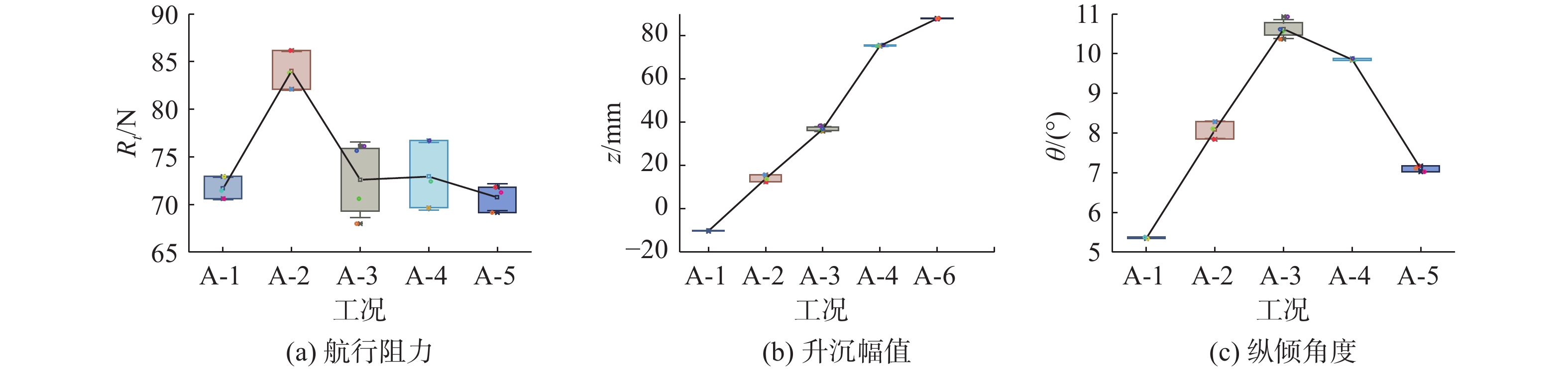
图 6 不同速度工况下静水阻力拖曳试验结果
Figure 6. Results of still water resistance towng test under different speed conditions
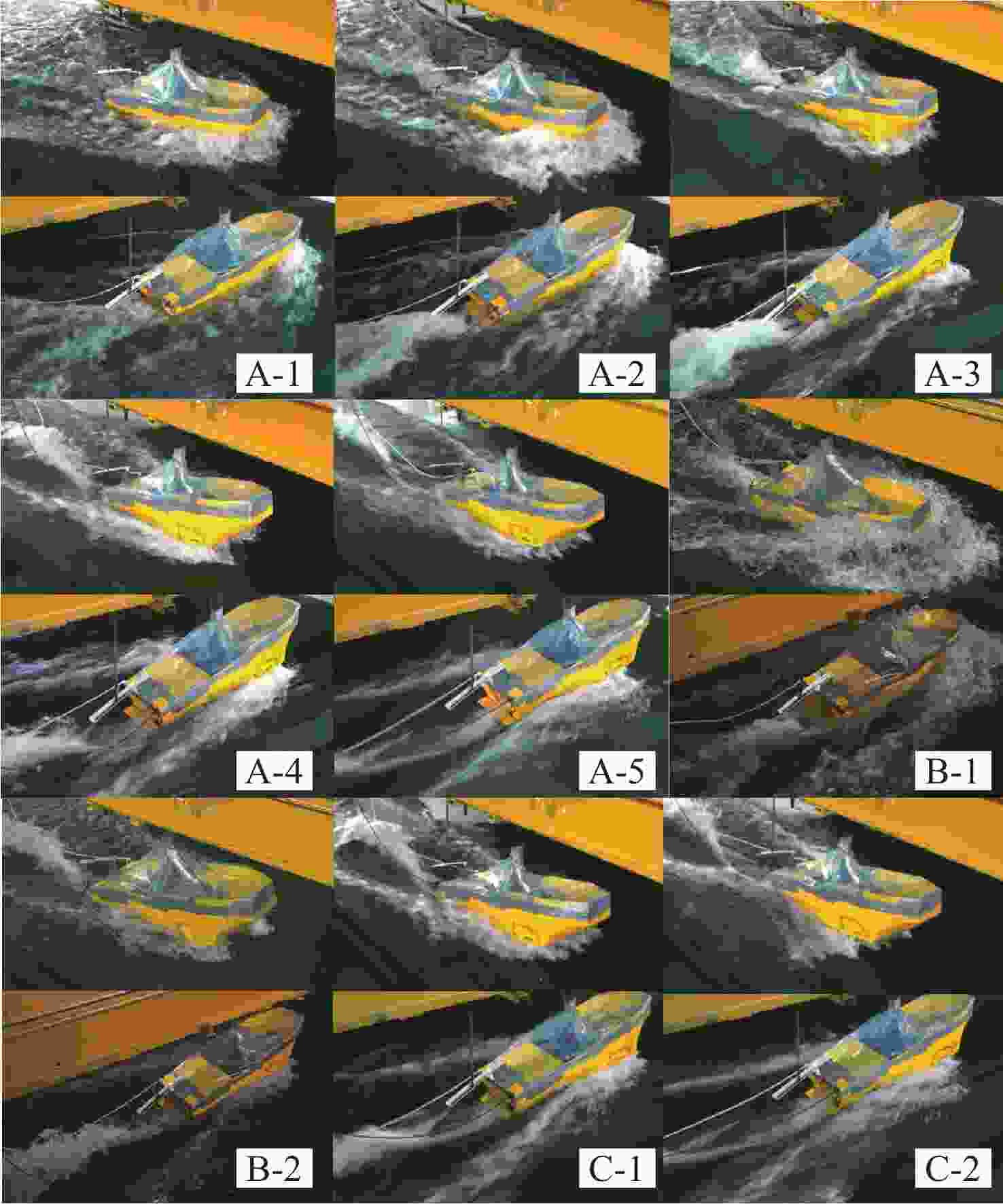
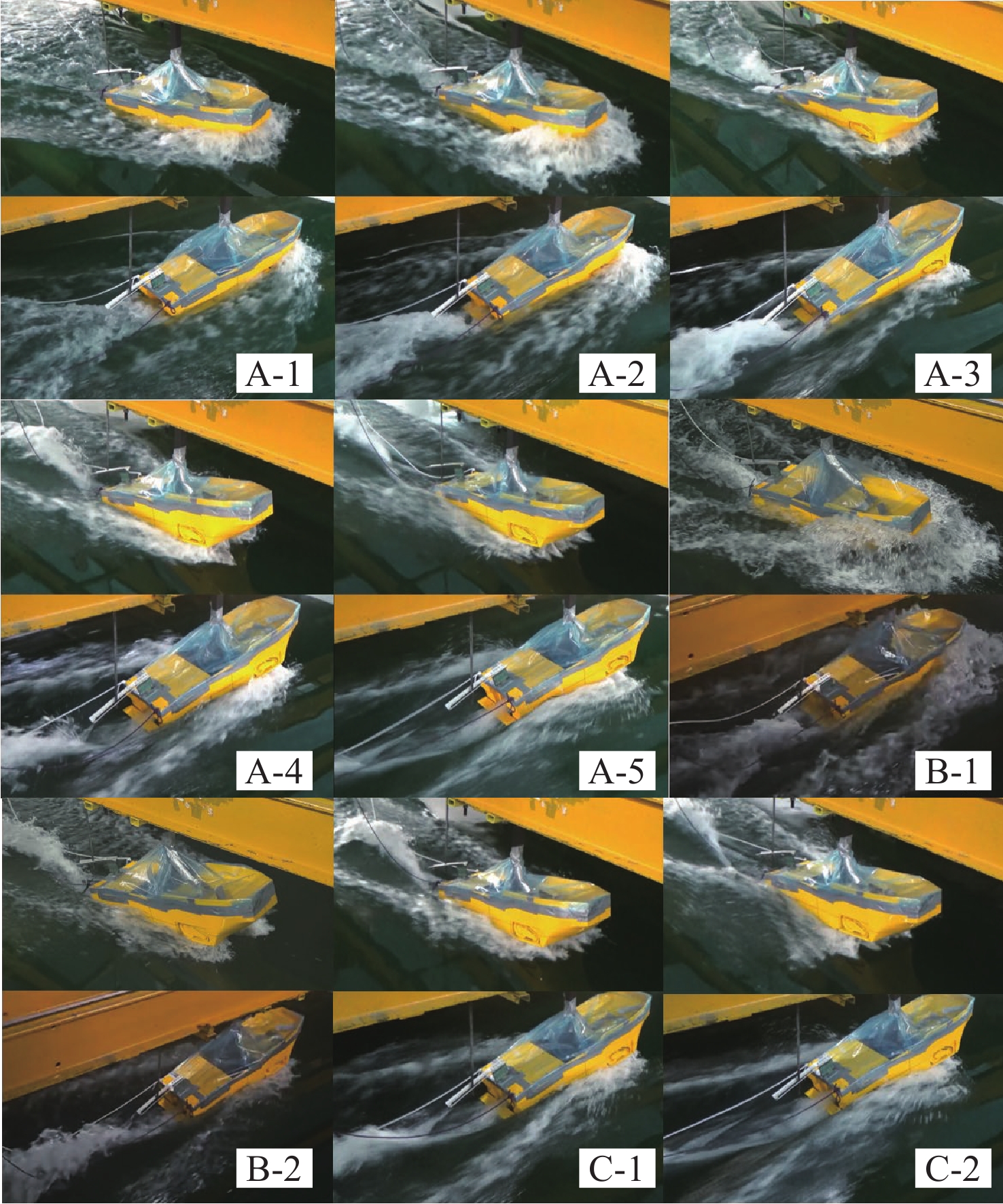
图 7 静水阻力拖曳试验下水陆两栖无人车艏艉流场状态
Figure 7. Bow and stern flow field states of the amphibious vehicle under still water resistance towing test
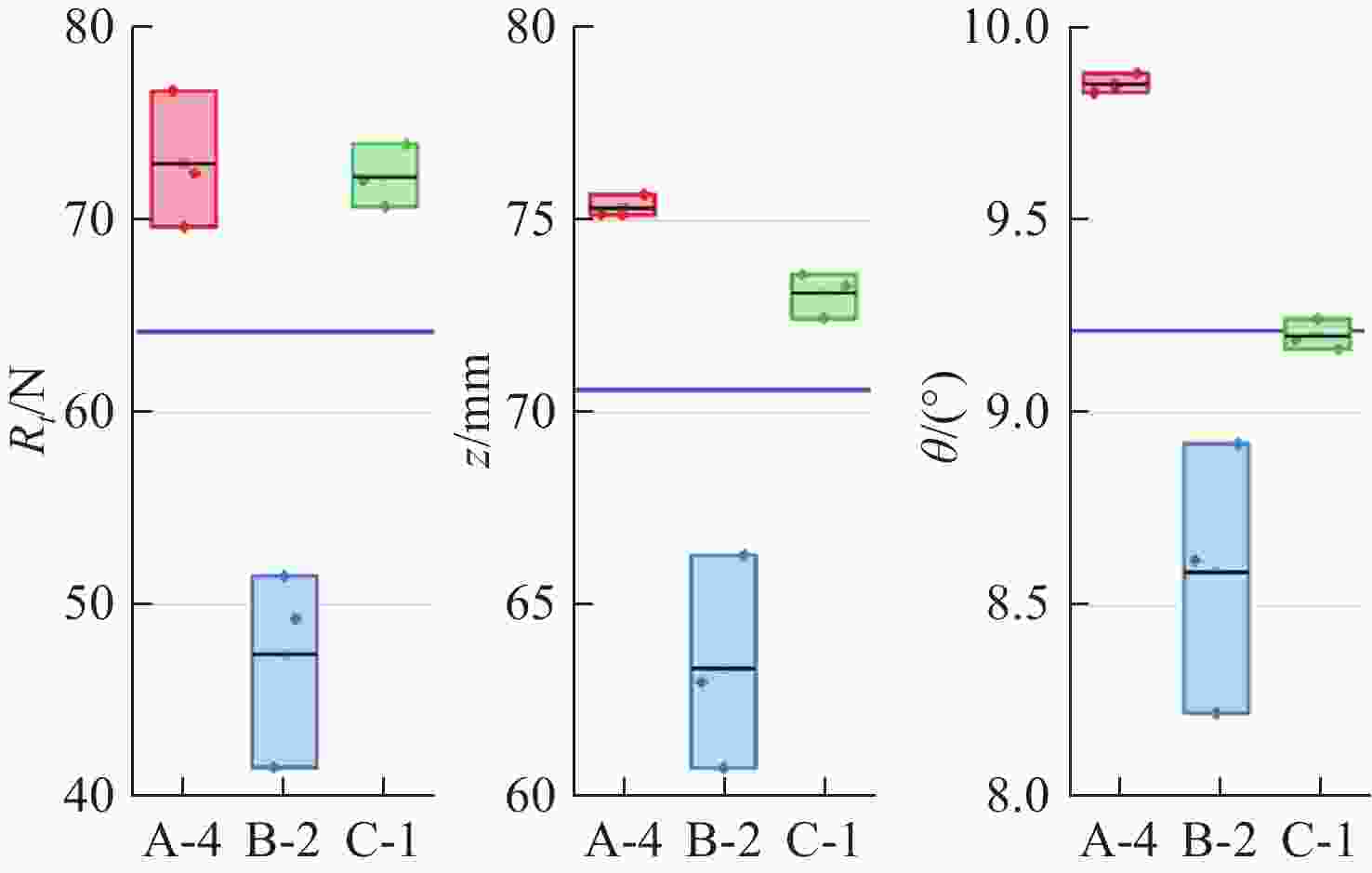
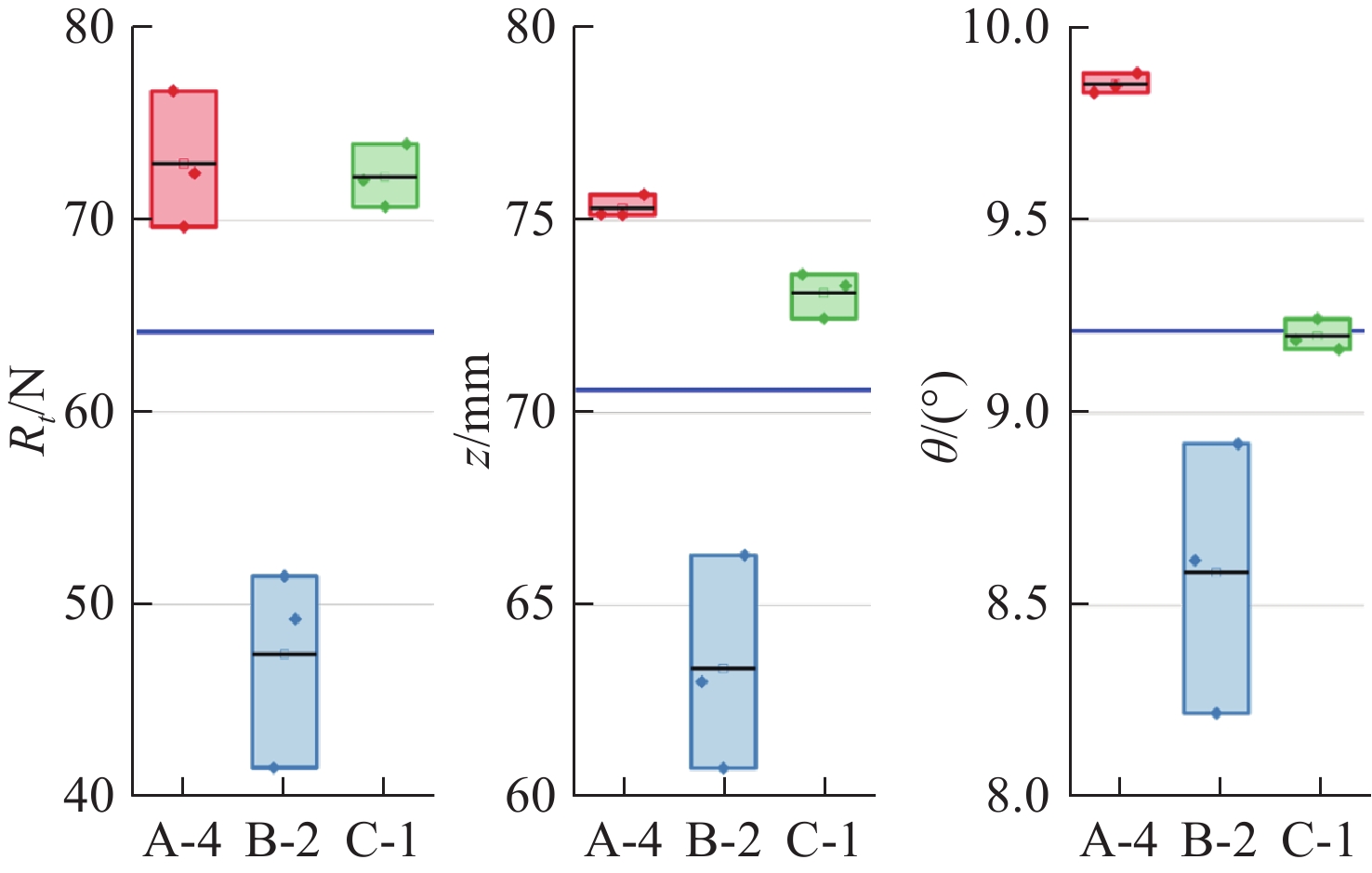
图 8 不同尾翼板角度工况下静水阻力拖曳试验结果
Figure 8. Results of still water resistance towing test under different stern flap angle conditions
表 1 模型主尺度参数
Table 1. Main scale parameters of the model
参数 符号 数值 质量/kg m 29.110 长度/m LOA 1.290 宽度/m B 0.383 深度/m D 0.241 平均吃水深度/m d 0.122 船艏吃水深度/m dF 0.071 船艉吃水深度/m dA 0.118 排水量/m3 V 0.029 绕Y轴转动质量/(kg·m2) IYY 10.371 尾翼板宽度/m b 0.071  下载: 导出CSV
下载: 导出CSV
表 2 静水阻力拖曳试验工况
Table 2. Working conditions of still water resistance towing test
试验工况 拖曳速度/(m/s) Fr 尾翼板角度/(°) A-1 2.100 0.591 4 A-2 2.625 0.738 4 A-3 2.940 0.827 4 A-4 3.675 1.034 4 A-5 4.410 1.241 4 B-1 2.625 0.738 0 B-2 3.675 1.034 0 C-1 3.675 1.034 8 C-2 4.410 1.241 8
下载: 导出CSV
-
[1] 杨楚泉. 水陆两栖车辆原理与设计[M]. 北京: 国防工业出版社, 2003. [2] 蒋一, 孙寒冰, 邹劲, 等. 变角度尾压浪板对断级滑行艇阻力性能的影响[J]. 上海交通大学学报, 2017, 51(3): 320-325. doi: 10.16183/j.cnki.jsjtu.2017.03.012Jiang Y, Sun H B, Zou J, et al. Influence of angle-variable stern flap on resistance performance of stepped planning hull[J]. Journal of Shanghai Jiao Tong University, 2017, 51(3): 320-325. doi: 10.16183/j.cnki.jsjtu.2017.03.012 [3] 孙承亮, 徐小军, 唐源江, 等. 分段履带式水陆两栖车减阻增速试验及数值仿真[J]. 国防科技大学学报, 2022, 44(5): 201-208. doi: 10.11887/j.cn.202205022Sun C L, Xu X J, Tang Y J, et al. Experimental and numerical simulation of reducing resistance an increasing speed for a segmented-track amphibious vehicle[J]. Journal of National University of Defense Technology, 2022, 44(5): 201-208. doi: 10.11887/j.cn.202205022 [4] 郑义, 董文才, 姚朝帮, 等. 排水型深V船系列模型尾板减阻试验研究[J]. 上海交通大学学报, 2011, 45(4): 475-480. doi: 10.16183/j.cnki.jsjtu.2011.04.007Zheng Y, Dong W C, Yao C B, et al. Experimental study on resistance reduction of displacement type deep-V hull model using stern flap[J]. Journal of Shanghai Jiao Tong University, 2011, 45(4): 475-480. doi: 10.16183/j.cnki.jsjtu.2011.04.007 [5] Bi X S, Shen H L, Zhou J, et al. Numerical analysis of the influence of fixed hydrofoil installation position on seakeeping of the planing craft[J]. Applied Ocean Research, 2019(90): 101863. doi: 10.1016/j.apor.2019.101863 [6] Hou H, Krajewski M, Iiter Y K, et al. An experimental investigation of the impact of retrofitting an underwater stern foil on the resistance and motion[J]. Ocean Engineering, 2020(205): 107290. [7] Helvacioglu S, Helvacioglu I H, Tuncer B. Improving the river crossing capability of an amphibious vehicle[J]. Ocean Engineering, 2011(38): 2201-2207. doi: 10.1016/j.oceaneng.2011.10.001 [8] Sun C L, Xu X J, Wang L H, et al. Research on hydrodynamic performance of a blended wheel-track amphibious truck using experimental and simulation approaches[J]. Ocean Engineering, 2021(228): 108969. doi: 10.1016/j.oceaneng.2021.108969 [9] Zhang G Q, Wang J C, Feng Y K, et al. Experimental and numerical investigation on the hydrodynamic performance of an amphibious vehicle under the interaction of traveling mechanism mudguard and waterjet propulsor duct[J]. Ocean Engineering, 2025(340): 122426. doi: 10.1016/j.oceaneng.2025.122426 [10] 张国卿, 冯亿坤, 靳昊斌, 等. 尾翼板对水陆两栖车水动力性能影响的数值分析[J]. 水下无人系统学报, 2026, 34(1): 1-8.Zhang G Q, Feng Y K, Jin H B, et al. Numerical analysis of effect of stern flap on hydrodynamic performance of amphibious vehicles[J]. Journal of Unmanned Undersea Systems, 2026, 34(1): 1-8. [11] 潘泊衡, 高霄鹏. 尾插板对滑行艇阻力及纵向稳定性影响试验分析[J]. 船海工程, 2018, 47(2): 26-28.Pan B H, Gao X P. Experimental study on tail-board influence upon resistance and stability of planing craft[J]. Ship & Ocean Engineering, 2018, 47(2): 26-28. [12] 张国卿, 冯亿坤, 徐小军. 进水流道对水陆两栖车水动力性能的影响研究[J]. 华中科技大学学报(自然科学版), 2024, 52(10): 47-53. doi: 10.13245/j.hust.240471Zhang G Q, Feng Y K, Xu X J. Research on effect of inlet duct on hydrodynamic performance of amphibious vehicle[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2024, 52(10): 47-53. doi: 10.13245/j.hust.240471 [13] 冯亿坤, 张国卿, 徐小军. 车体-喷水推进器耦合作用对水陆两栖车水动力性能影响研究[J]. 水动力学研究与进展A辑, 2024, 39(2): 139-145. doi: 10.16076/j.cnki.cjhd.2024.02.003Feng Y K, Zhang G Q, Xu X J. Coupling effect of vehicle body and waterjet propulsion on hydrodynamic performance of amphibious vehicle[J]. Journal of Hydrodynamics, 2024, 39(2): 139-145. doi: 10.16076/j.cnki.cjhd.2024.02.003 [14] Feng Y K, Zhang G Q, Wang J C, et al. Numerical investigation of the hydrodynamic characteristics of a light high-speed amphibious vehicle in still water under oblique inflow conditions[J]. Physics of Fluids, 2025, 37(4): 047150 doi: 10.1063/5.0271256 [15] Yang M, Wang Y H, Yang S Q, et al. Shape optimization of underwater glider based on approximate model technology[J]. Applied Ocean Research, 2021, 110: 102580. doi: 10.1016/j.apor.2021.102580 [16] 毕明琪. 多船体编队航行水动力性能数值与试验研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 331
- HTML全文浏览量: 170
- PDF下载量: 146
- 被引次数: 0





