

A High-Precision Motion Control Strategy for Valve-Controlled Cylinders
-
摘要: 阀控缸作为电液伺服系统的关键组成部分, 其运动精度直接决定了系统平稳性、响应速度及终端定位精度。然而, 阀控缸系统在实际运行中常面临复杂的非线性摩擦、参数不确定性以及外部负载扰动等问题, 导致传统控制策略难以满足高精度定位的严苛要求。比例-积分-微分(PID)控制在应对强非线性和参数变化时鲁棒性不足, 易产生超调或稳态误差; 而滑模控制(SMC)虽具强鲁棒性, 但其固有的抖振现象会加剧机械磨损并影响定位精度。为攻克这一技术瓶颈, 文中提出了一种先进的基于快速动力学补偿项和非线性鲁棒反馈项的自适应鲁棒控制策略。为验证所提策略的有效性与优越性, 文中进行了详尽的对比仿真分析。结果表明, 相较于传统的PID控制和SMC, 文中设计的自适应鲁棒控制器能够显著提升阀控缸轨迹跟踪精度、动态响应与抗干扰能力, 控制性能更优。Abstract: Valve-controlled cylinder serves as a key component in electro-hydraulic servo systems, and its motion precision is pivotal to the system’s stability, responsiveness, and final positioning accuracy. However, valve-controlled cylinder systems often encounter challenges in practical operation, such as complex nonlinear friction, parameter uncertainties, and external load disturbances, which make it difficult for conventional control strategies to meet the stringent requirements of high-precision positioning. Proportional-integral-derivative(PID) control suffers from insufficient robustness when dealing with strong nonlinearities and parameter variations, making it prone to overshoot or steady-state errors. In contrast, although sliding mode control(SMC) offers strong robustness, its inherent chattering phenomenon exacerbates mechanical wear and impairs positioning accuracy. To overcome this technical bottleneck, this paper proposed an advanced adaptive robust control(ARC) strategy incorporating a fast dynamics compensation term and a nonlinear robust feedback term. To validate the effectiveness and superiority of the proposed strategy, comprehensive comparative simulation analyses were conducted. The results demonstrate that compared with traditional PID control and SMC, the designed adaptive robust controller significantly improves the trajectory tracking accuracy, dynamic response, and disturbance rejection capability of the valve-controlled cylinder system, achieving superior control performance.
-
表 1 P2P轨迹控制效果评价
Table 1. Effect evaluation of P2P trajectory control
m 控制器 Me µe σe C2 9.586 314×10−3 3.558 723×10−3 4.035 888×10−3 C3 3.382 303×10−3 1.114 610×10−3 1.272 802×10−3 C4 1.001 255×10−5 3.713 325×10−6 4.242 131×10−6  下载: 导出CSV
下载: 导出CSV
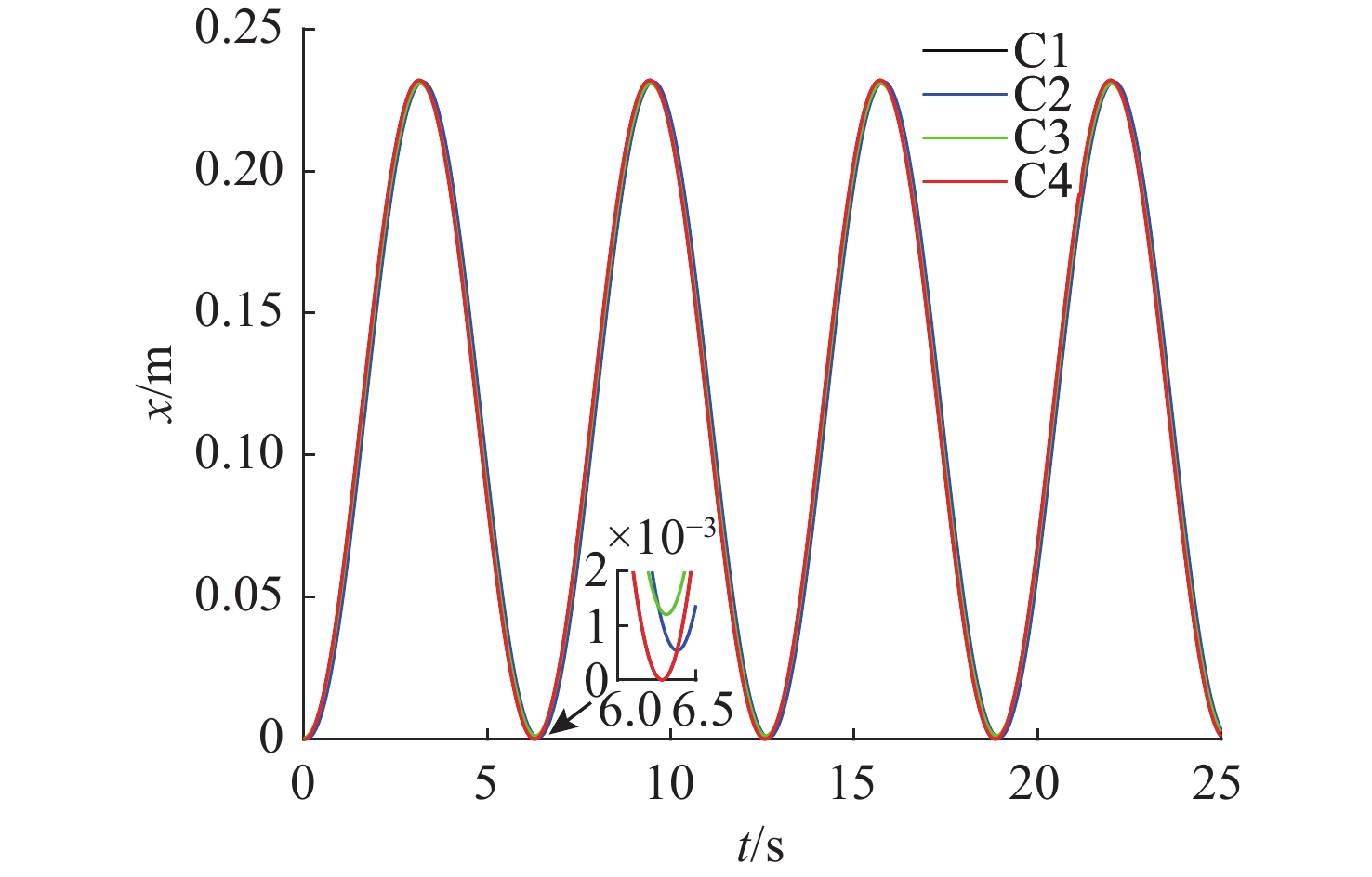
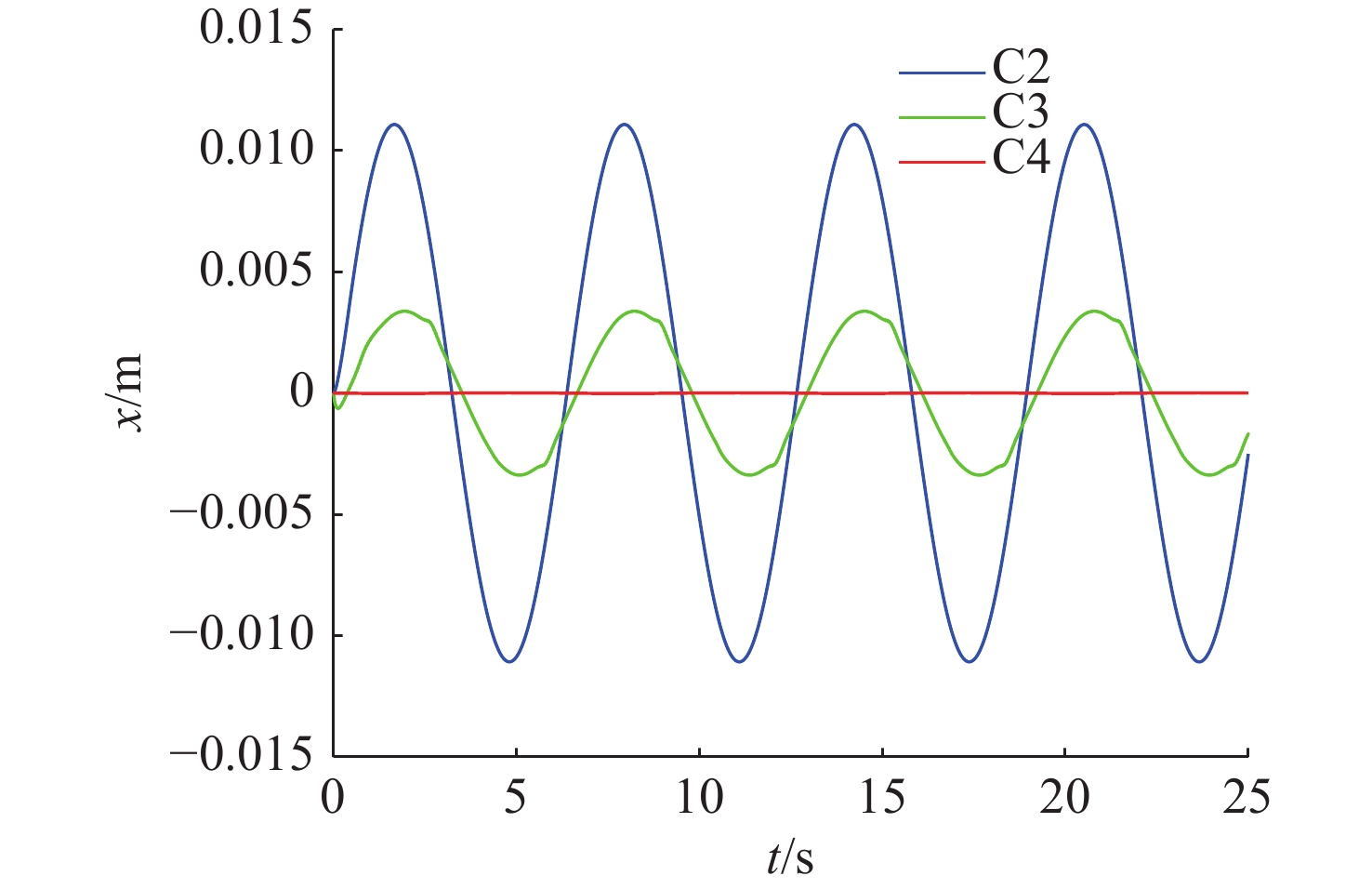
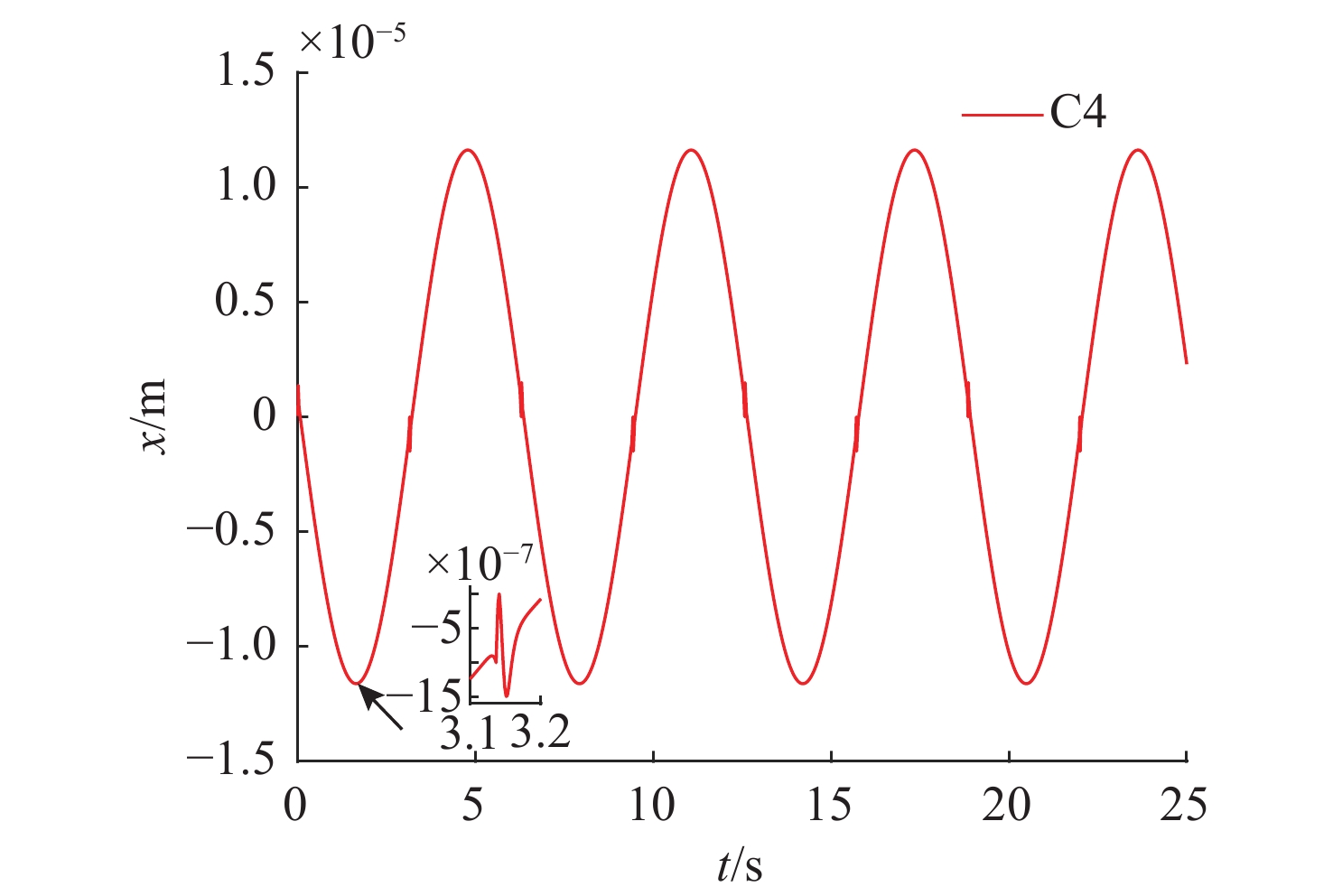
表 2 正弦轨迹控制效果评价
Table 2. Effect evaluation of sine trajectory control
m 控制器 Me µe σe C2 1.107 421×10−2 7.0757 67×10−33.394 331×10−3 C3 3.378 842×10−3 2.195 073×10−3 1.062 460×10−3 C4 1.162 227×10−5 7.432 161×10−6 3.556 806×10−6
下载: 导出CSV
-
[1] 刘恒, 陶建峰, 孙炜, 等. 负载口独立阀控缸库普曼模型预测控制方法[J]. 中南大学学报(自然科学版), 2025, 56(3): 911-922. [2] 孟琭, 杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260. doi: 10.12178/1001-0548.2021349Meng L, Yang X. Survey of object tracking algorithms[J]. Acta Automatica Sinica, 2019, 45(7): 1244-1260. doi: 10.12178/1001-0548.2021349 [3] 刘榛, 卢堃, 陆初觉. 液压升降台同步运行模型参考自适应控制中模型建立及研究[J]. 液压与气动, 2004, 6: 25-27. doi: 10.3969/j.issn.1000-4858.2004.06.009 [4] Taheri A, Gustafsson P, Rösth M, et al. Nonlinear model learning for compensation and feedfor-ward control of real-world hydraulic actuators using gaussian processes[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9525-9532. doi: 10.1109/LRA.2022.3190808 [5] Chen Z, Helian B, Zhou Y, et al. An integrated trajectory planning and motion control strategy of a variable rotational speed pump-controlled electro-hydraulic actuator[J]. IEEE/ASME Trans-actions on Mechatronics, 2023, 28(1): 588-597. doi: 10.1109/TMECH.2022.3209873 [6] Li C, Lyu L, He L B, et al. Precision motion control of an independent metering hydraulic system with nonlinear flow modeling and compensation[J]. IEEE Transactions on Industrial Electronics, 2022, 69(7): 7088-7098. doi: 10.1109/TIE.2021.3102434 [7] Cao Y, Li Y, Chen Y. Fractional order PID control for reduction of vibration and noise on induction motor[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6310-6319. doi: 10.1109/tmag.2019.2933176 [8] Chen C Y, Liu L Q, Cheng C C, et al. Fuzzy controller design for synchronous motion in a dual-cylinder electro-hydraulic system[J]. Control Engineering Practice, 2008, 16(6): 658-673. doi: 10.1016/j.conengprac.2007.08.005 [9] Yuan S H, Jia W K, Zhang X M. High-precision dynamic control method for water pressure based on sliding mode control[C]//2025 8th International Conference on Advanced Algorithms and Control Engineering (ICAACE), 2025: 1459-1463. [10] Kim D E, Lee D C. Feedback linearization control of three-phase UPS inverter systems[J]. IEEE Transactions on Industrial Electronics, 2010, 57(3): 963-968. doi: 10.1109/TIE.2009.2038404 [11] Chen Z, Lyu L T, Wang F, et al. Motion control of independent metering electro-hydraulic system based on chamber pressure planning without mode switch[J]. Journal of Mechanical Engineering, 2024, 60: 302-312. doi: 10.3901/jme.2024.02.302 [12] Xia Y X, Qi M Z, Lyu L T, et al. Advanced motion control of hydraulic manipulator with precise compensation of dynamic friction[J]. IEEE Transactions on Industrial Informatics, 2024, 20(7): 9375-9384. doi: 10.1109/TII.2024.3384600 [13] 夏杨修, 吕立彤, 陈正, 等. 液压机械膏驱动关节的非线性摩擦力自适应补偿控制[J]. 液压与气动, 2024, 48(1): 20-30. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 151
- HTML全文浏览量: 77
- PDF下载量: 121
- 被引次数: 0
图(8) / 表(2)




