摘要:
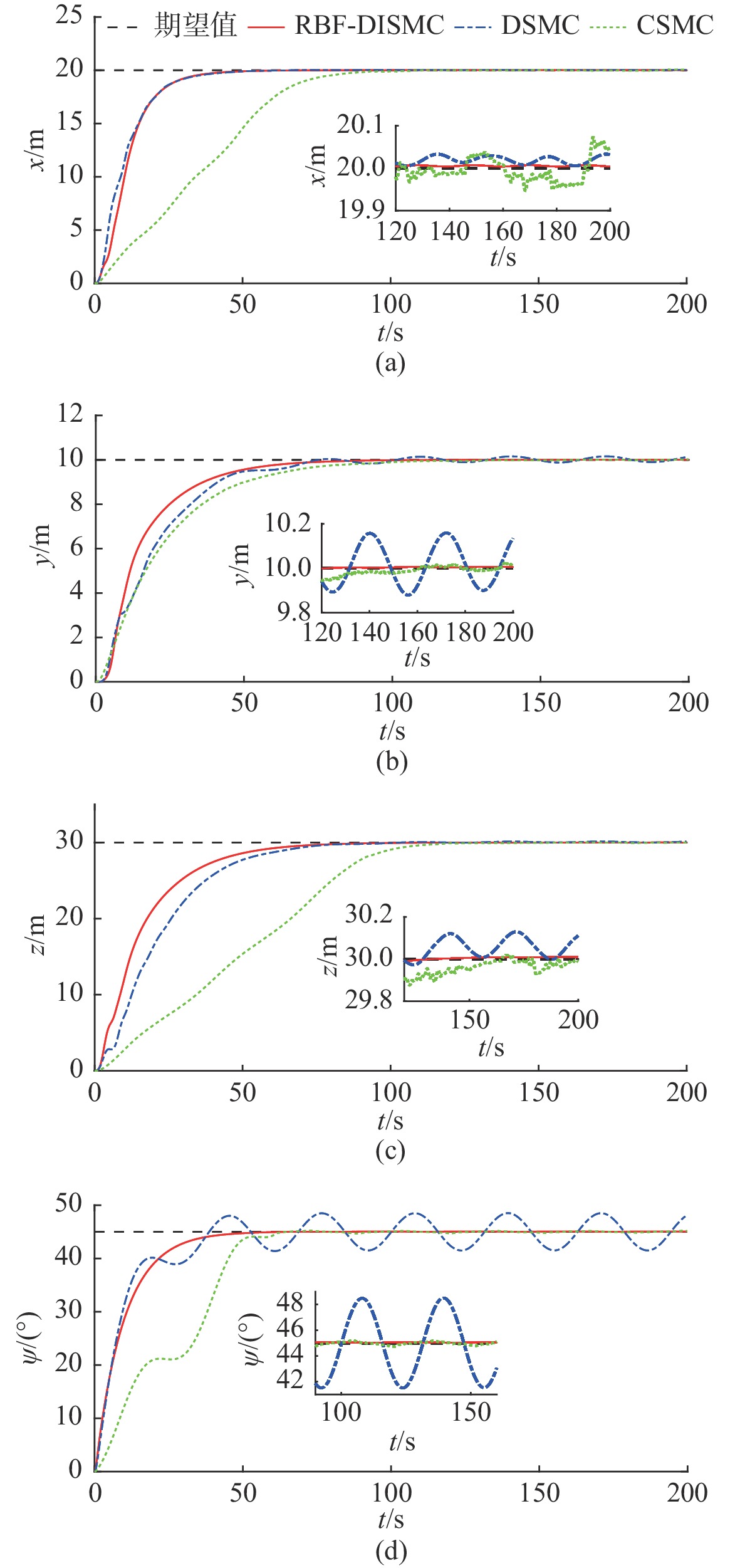
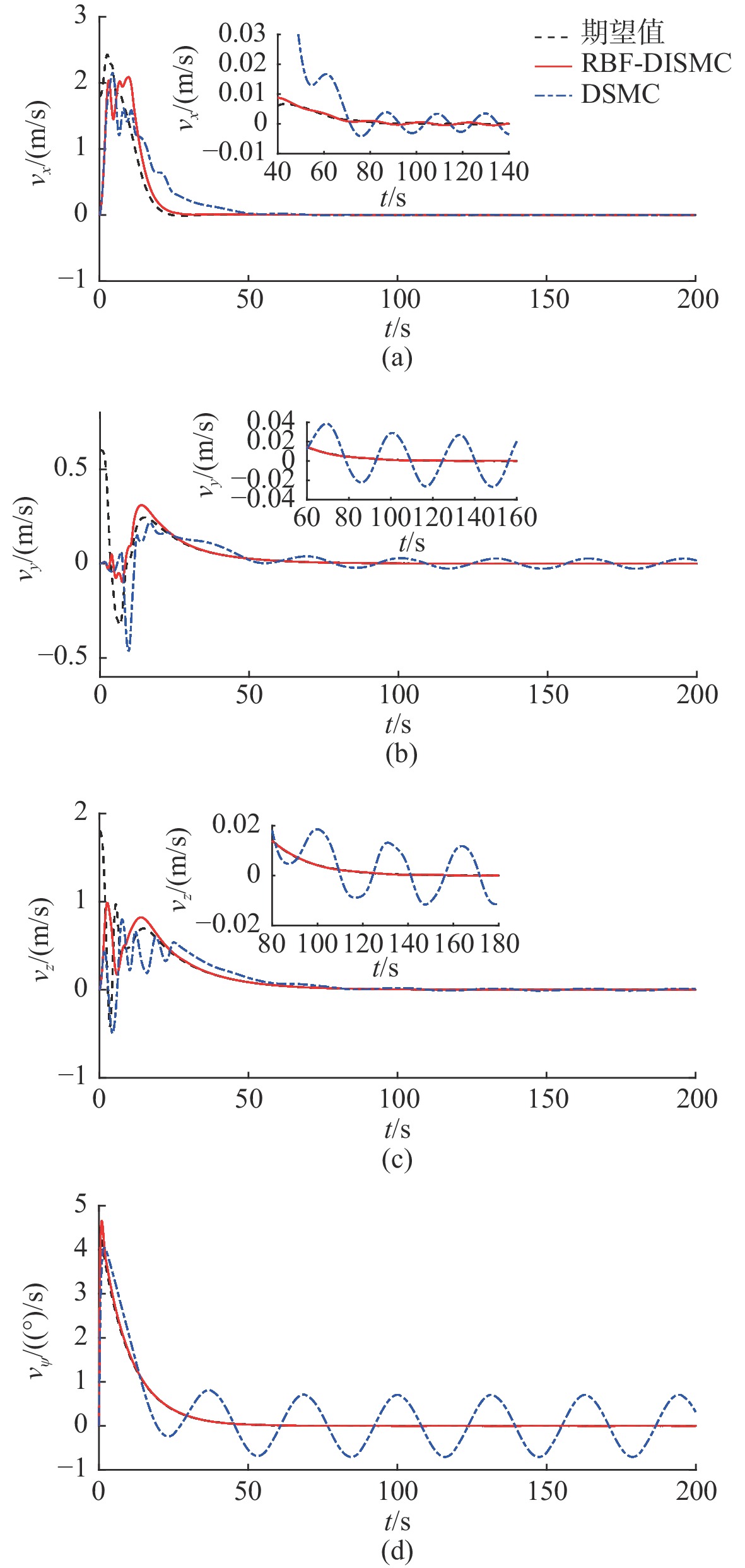
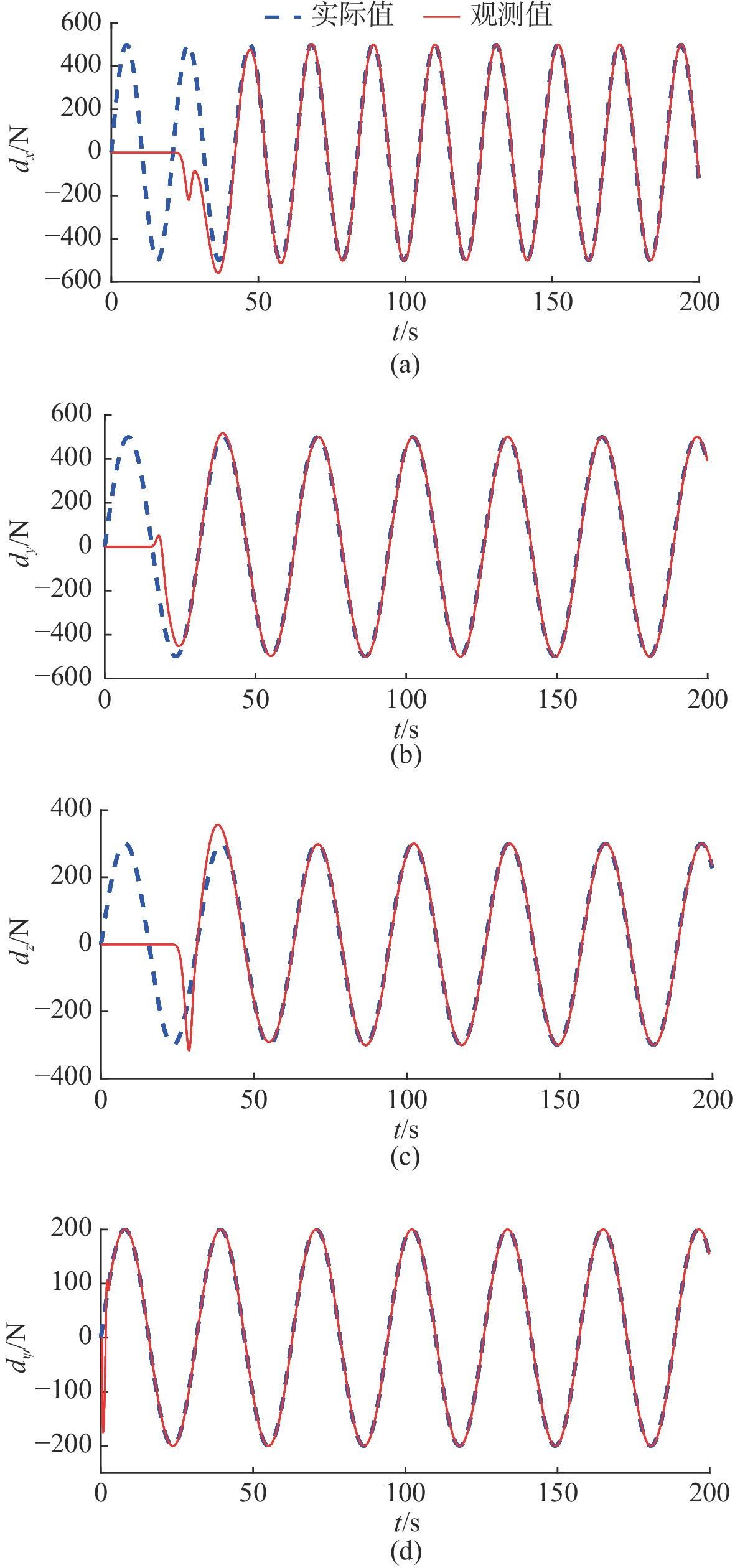
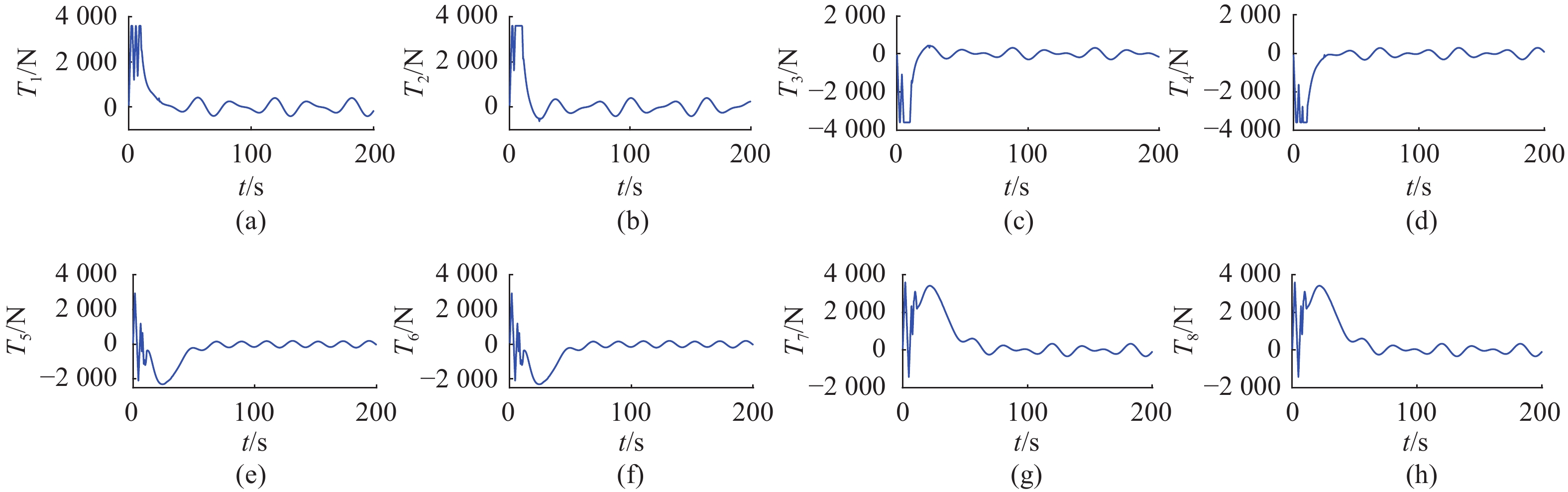
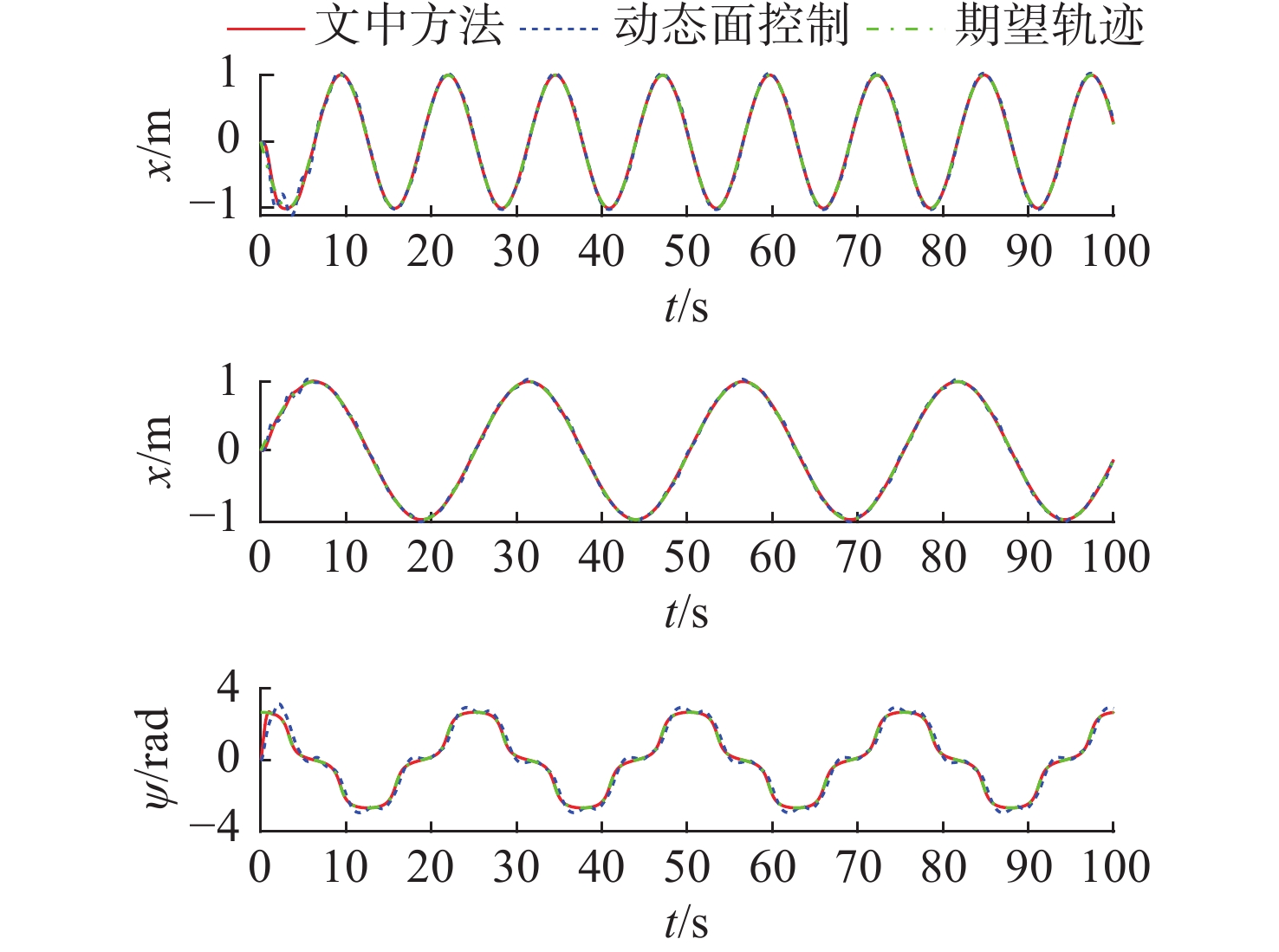
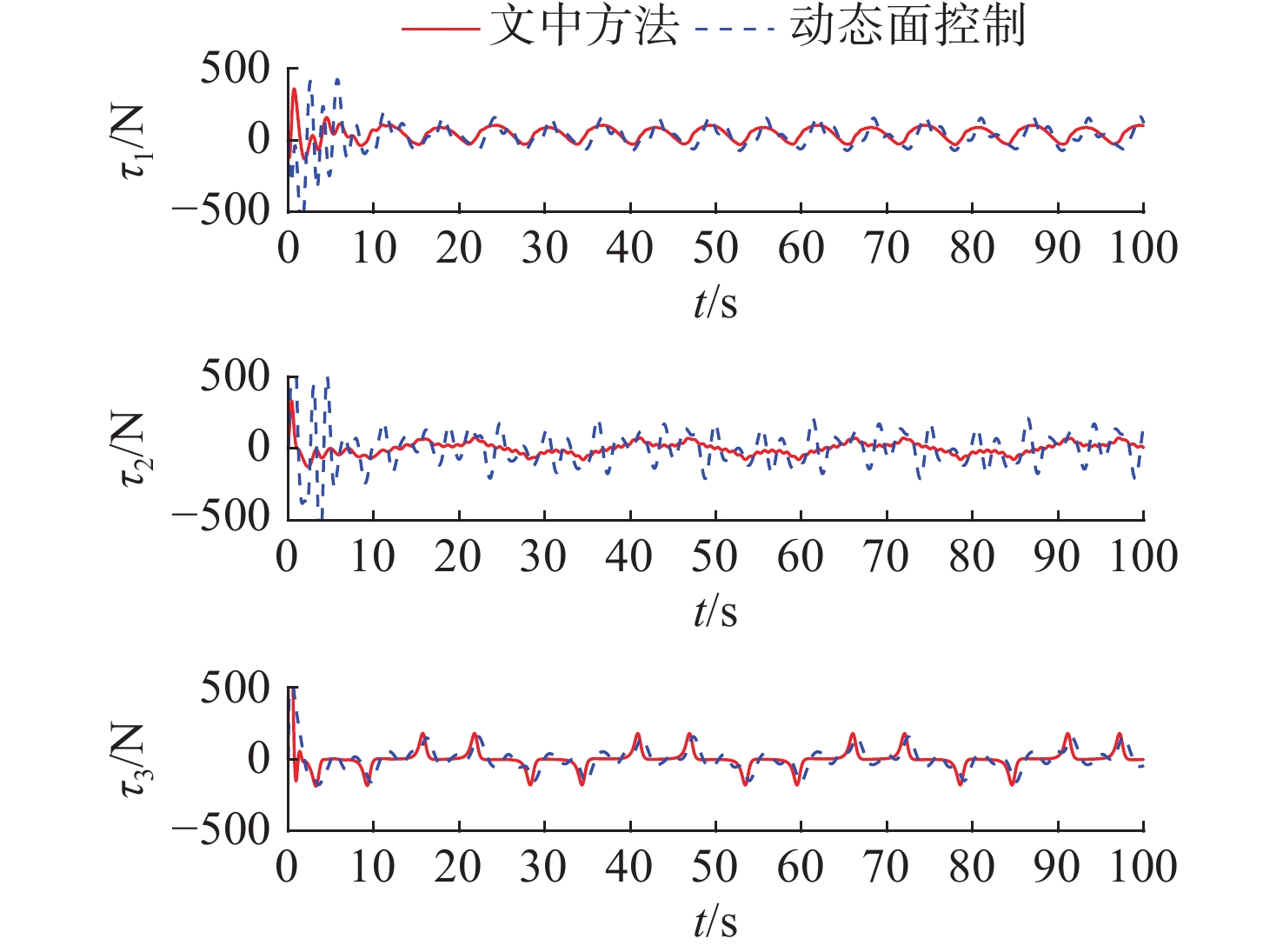
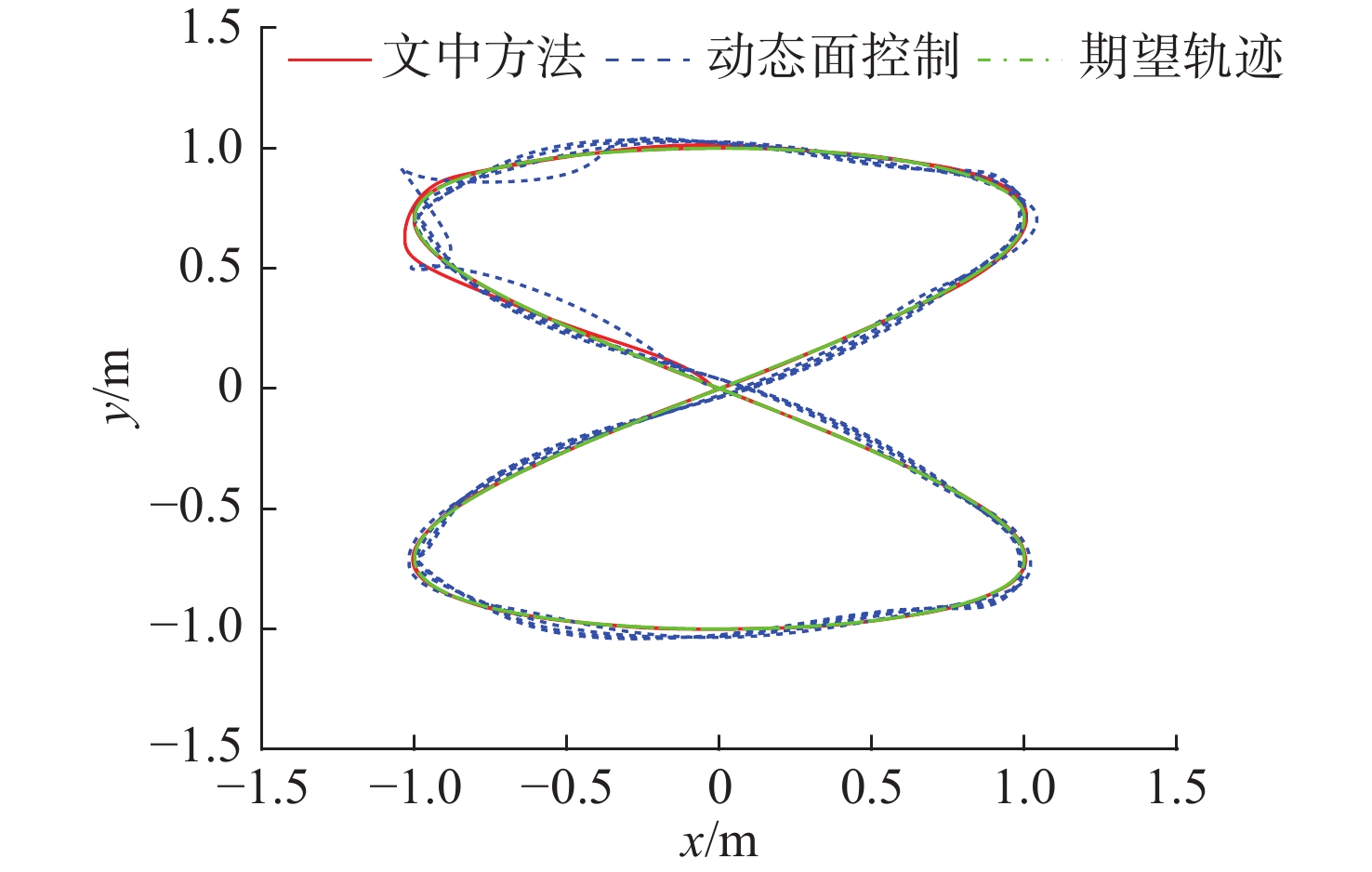
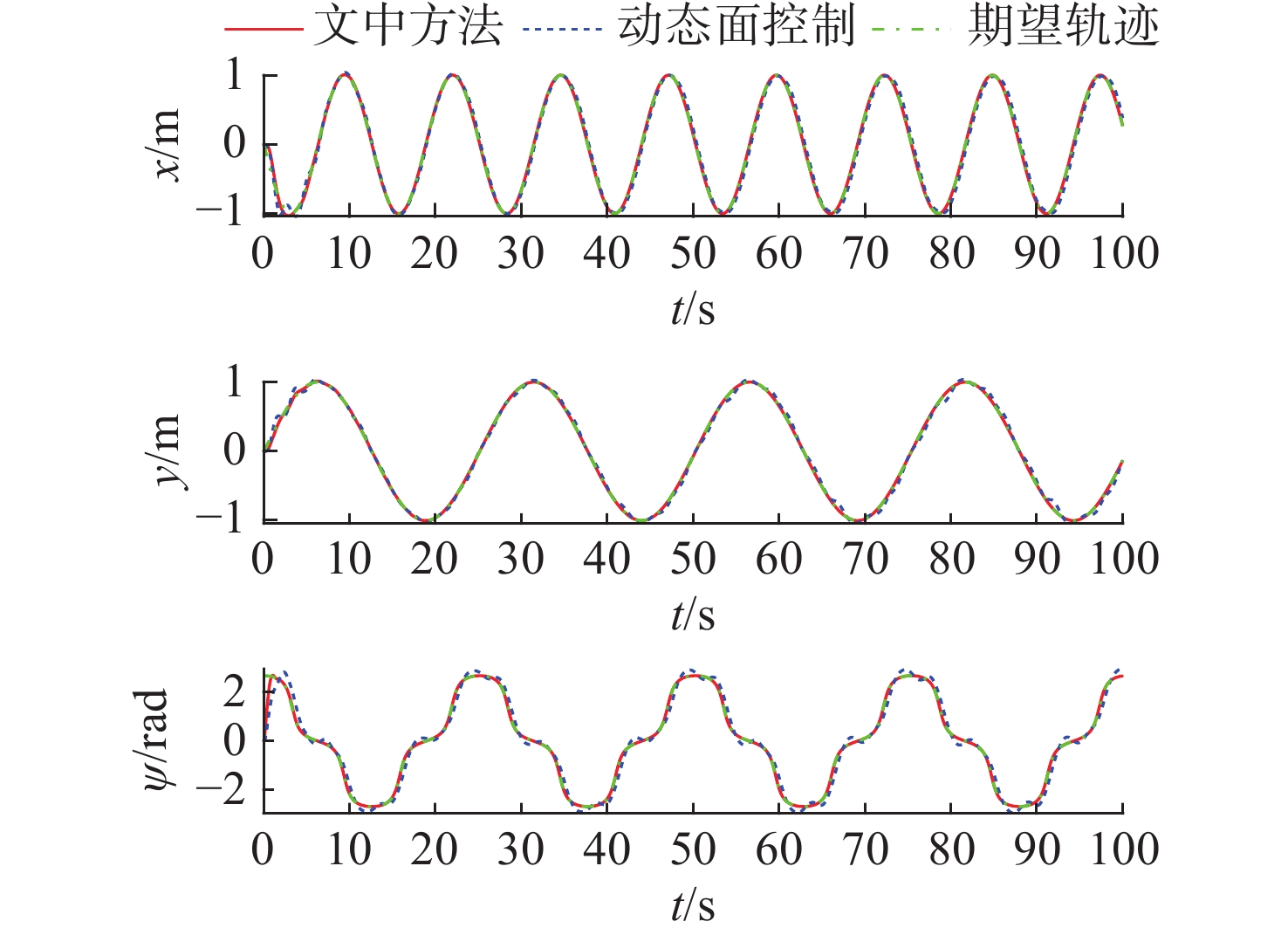
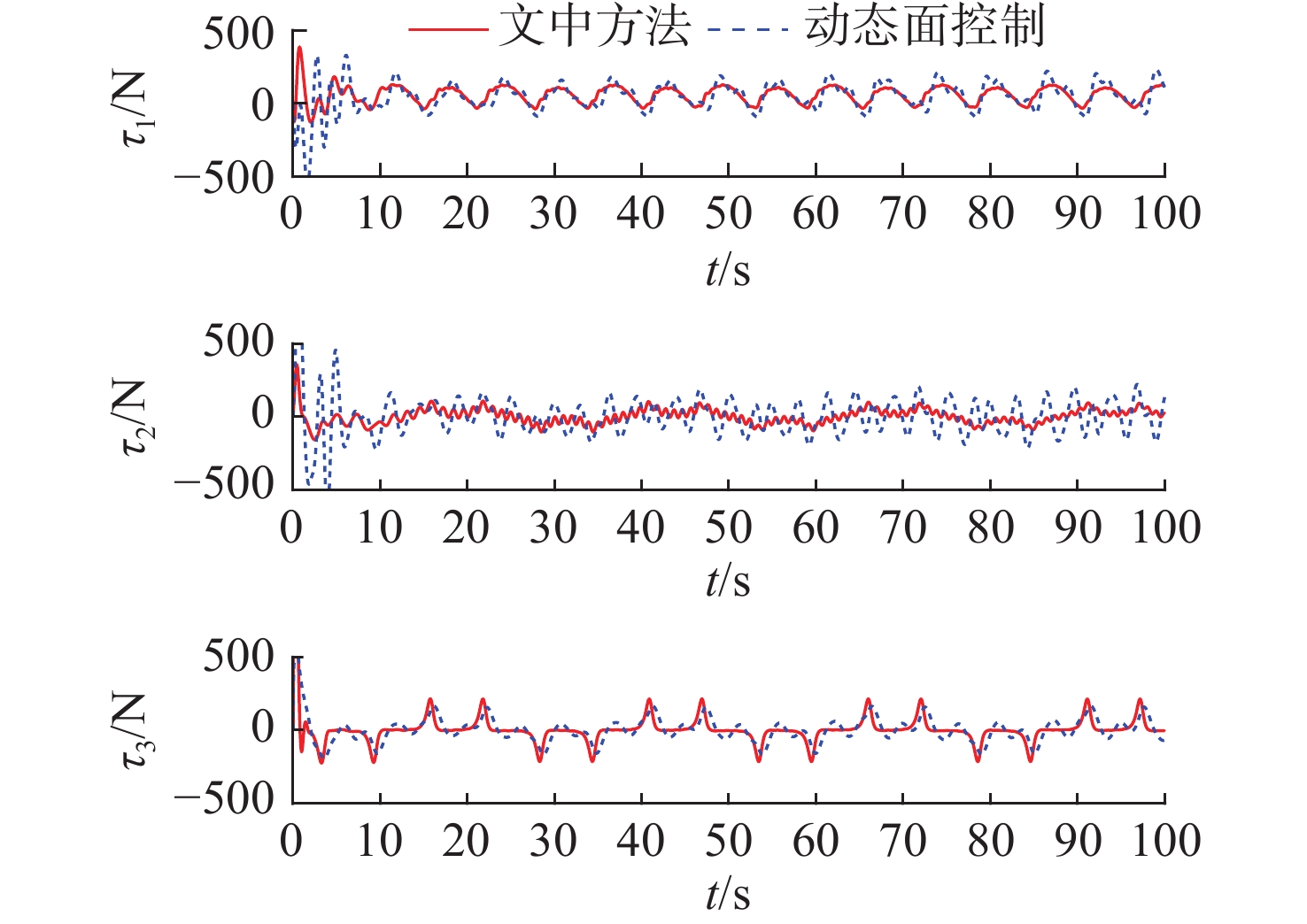
针对自主水下航行器(AUV)系统不确定性及输入饱和问题, 提出了一种改进的自适应神经网络预设性能控制策略, 完成对期望轨迹的跟踪。首先, 引入非线性变换, 使位置误差始终处在预设时变范围内, 提高了控制精度, 并基于反步法和Lyapunov函数设计系统虚拟控制律; 然后, 利用神经网络技术处理系统模型未知参数, 并重构系统真实控制律, 使传统反步控制策略得以简化, 有效降低了计算复杂度, 并在Lyapunov稳定性理论的基础上, 证明了AUV系统的误差信号均有界; 最后, 与传统动态面控制方法进行对比, 仿真结果表明所提出的控制策略控制性能更好, 在考虑输入饱和情况下可有效克服不确定性对系统性能的影响, 实现对目标轨迹的有效跟踪。
徐文峰, 刘加朋, 于金鹏, 等. 输入饱和下AUV自适应神经网络预设性能控制[J]. 水下无人系统学报, 2024, 32(2): 376-382. doi: 10.11993/j.issn.2096-3920.2023-0041.