

Dynamic Path Generation Method for UUV Terrain Tracking Using Forward-Looking and Altimetry Sonar
-
摘要: 保持对海底地形的定高跟踪航行是无人水下航行器(UUV)执行海洋勘测和水下目标搜索任务时常采用的一种运动形式, 其核心是UUV如何对未知起伏的海底地形进行实时探测, 并基于探测信息在线、动态的生成跟踪路径, 以实现对地形的定高跟踪航行, 同时避免与地形发生碰撞。针对上述问题, 提出了一种基于前视声呐探测地形信息、基于多项式拟合动态生成跟踪路径的方法。首先, UUV利用前视声呐对海底地形进行实时探测, 对获得的地形探测数据进行仿射处理后, 得到具有离散特性的定高仿射数据。然后, 采用基于最小二乘准则的三次多项式方法对仿射数据进行拟合, 生成基于多项式函数描述的UUV地形跟踪航行路径。最后, 设计了一种包含声呐探测、数据仿射、路径生成和跟踪控制的动态执行框架, 实现UUV的实时地形跟踪航行任务。文中所提出的跟踪路径生成和动态执行框架通过对典型的海底“上坡”地形和“山地”地形跟踪的仿真验证, 证明了其有效性和可行性。Abstract: Maintaining fixed altitude tracking navigation of seafloor terrain is a common form of motion, which is used by unmanned undersea vehicle(UUV) on marine survey and underwater target search missions, the core of this motion is how UUV can detect unknown undulating seafloor terrain in real time, and generate tracking paths online and dynamically based on detection information, so as to achieve fixed altitude tracking navigation on the terrain while avoiding collision with the terrain. In this paper, to solve the above problems, a method is proposed, which is of detecting terrain information based on forward looking sonar, and dynamically generating tracking path based on polynomial fitting. First, UUV uses forward looking sonar to conduct real-time detection of seafloor terrain. After affine processing of the obtained terrain detection data, fixed-height affine data with discrete characteristics can be obtained. Then, the cubic polynomial method based on least squares criterion is used to fit the affine data, and the navigation path of UUV terrain tracking based on polynomial function description is generated. Finally, a dynamic execution framework including sonar detection, data affine, path generation and tracking control is designed, in order to realize the real-time terrain tracking navigation mission of UUV. In this paper, through simulation of tracking on typical seafloor 'uphill' and 'mountainous' terrain, effectiveness and feasibility of the proposed tracking path generation and dynamic execution framework were demonstrated.
-

图 1 UUV海底地形跟踪动态路径生成示意图
Figure 1. Dynamic path generation for UUV seafloor terrain tracking

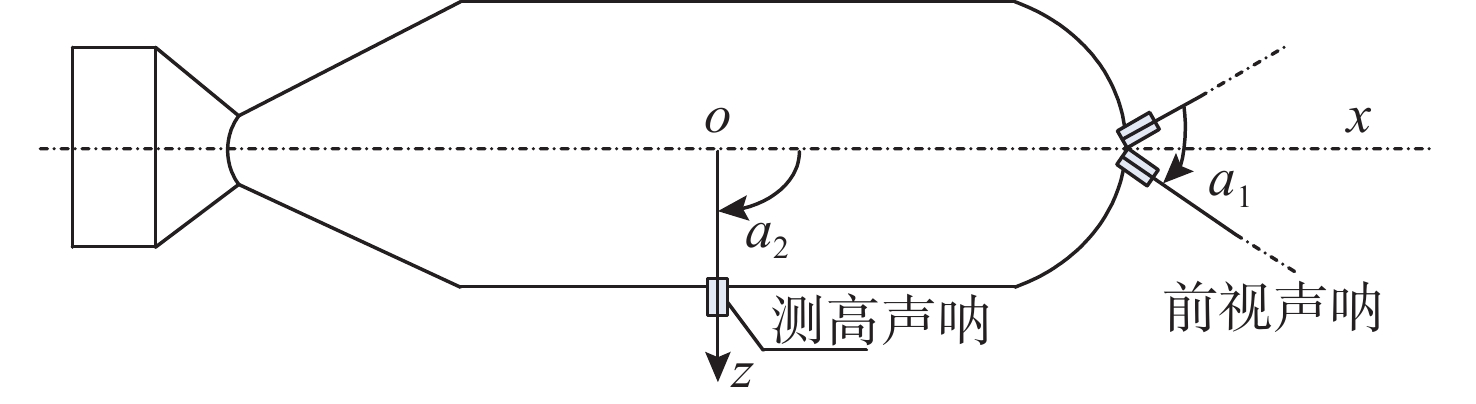
图 2 UUV测高声呐和前视声呐安装示意
Figure 2. Diagram of UUV forward-looking and altimetry sonar installation

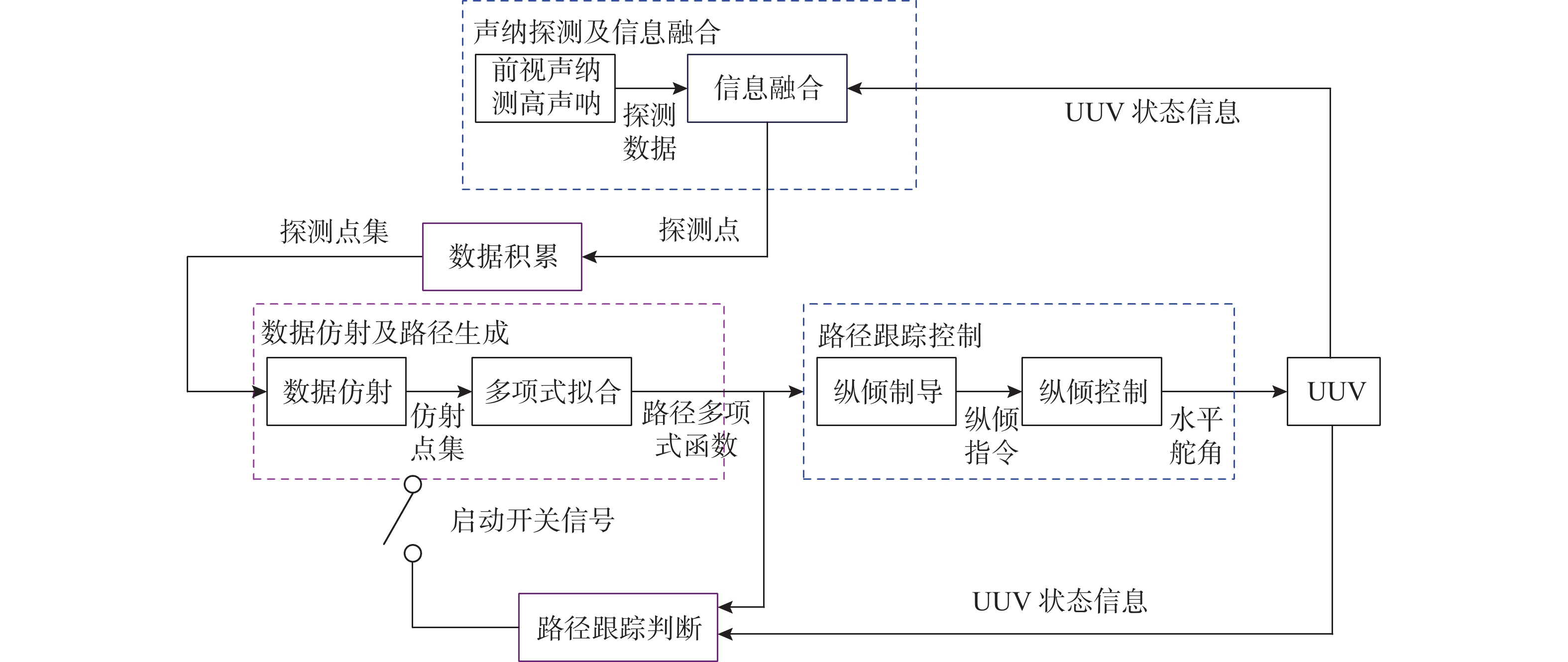
图 3 声呐探测-路径生成-跟踪控制动态执行框架
Figure 3. Dynamic execution framework based on sonar detection, path generation and tracking control

图 5 跟踪航行过程中纵倾指令及响应
Figure 5. Tracking longitudinal commands and responses during navigation

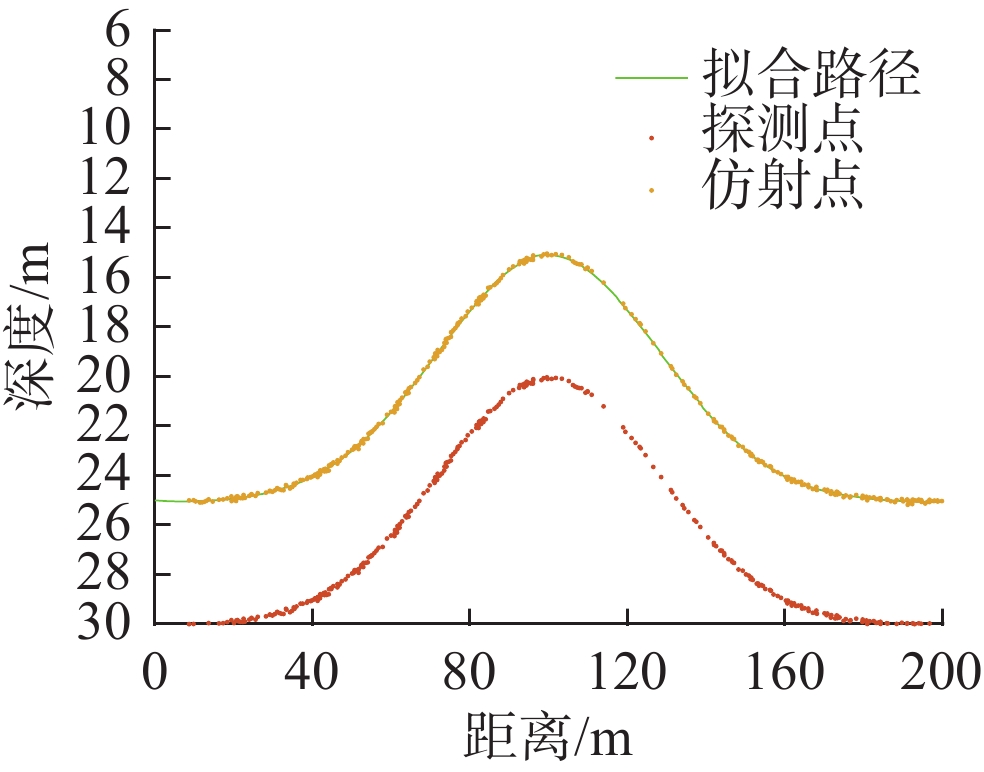
图 6 “上坡”地形跟踪中探测点、仿射点及生成路径示意
Figure 6. Detection point, affine point and generated path in uphill terrain tracking

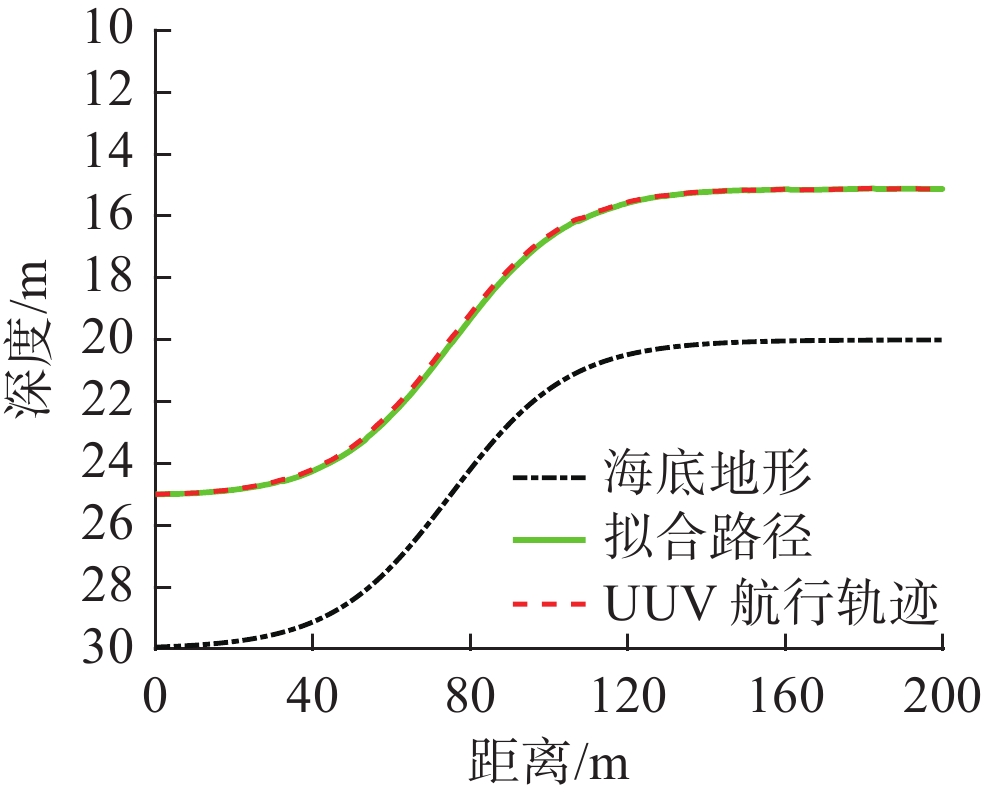
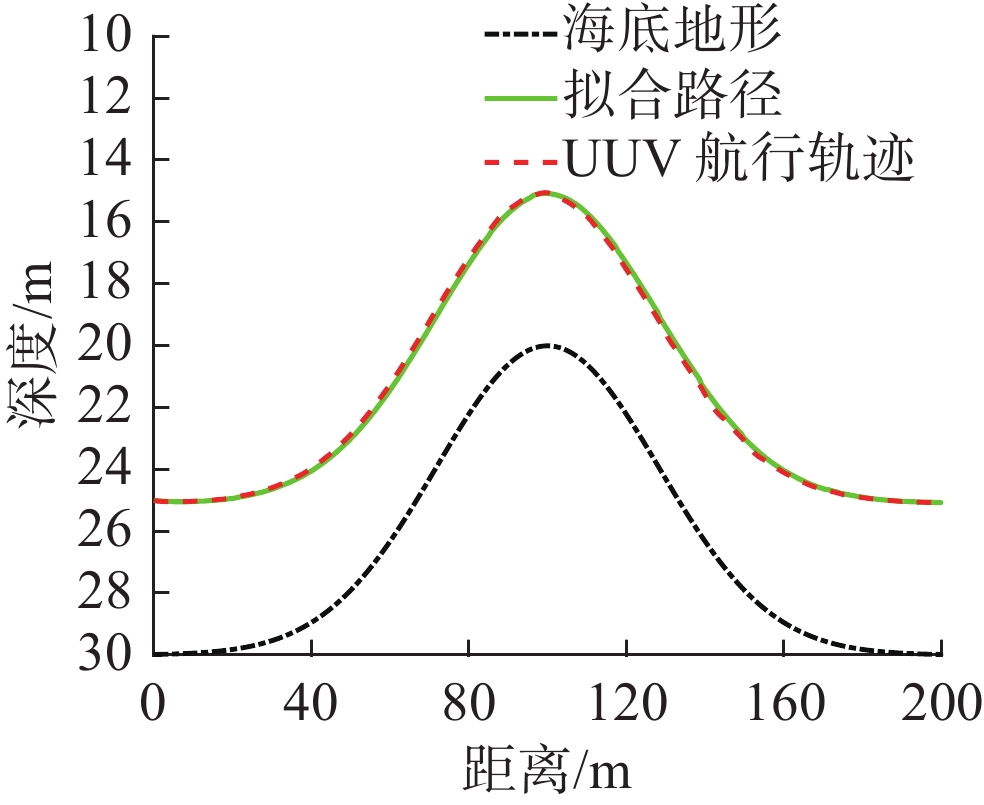
图 7 “山地”地形路径生成及跟踪结果
Figure 7. Path generation and tracking results in mountainous terrain

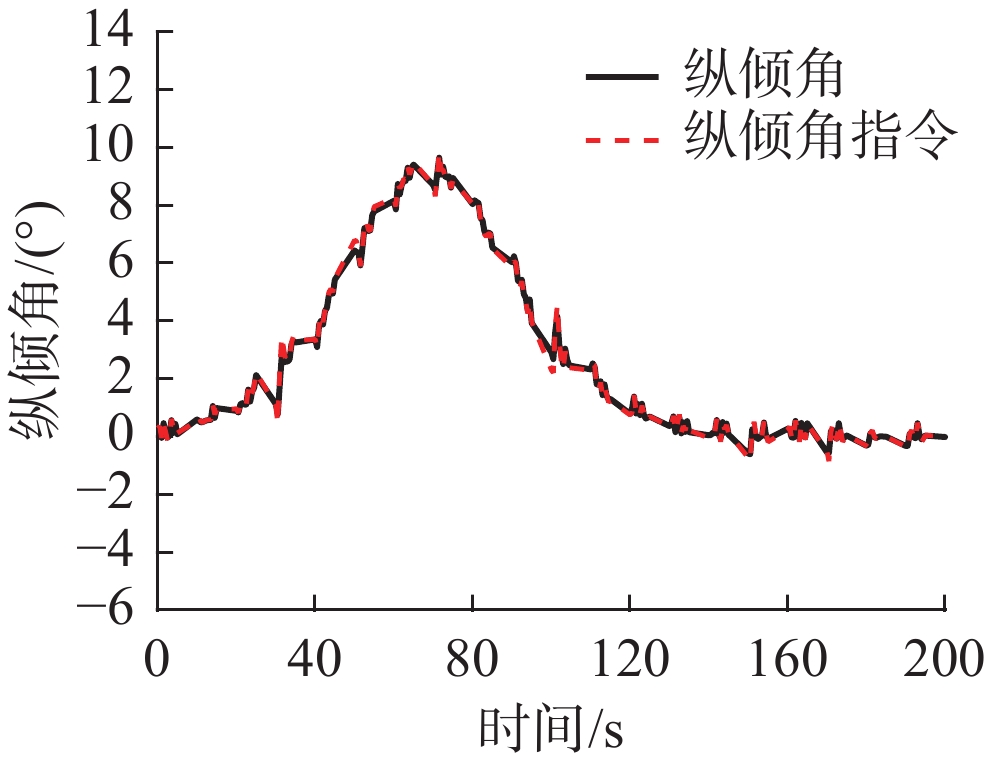
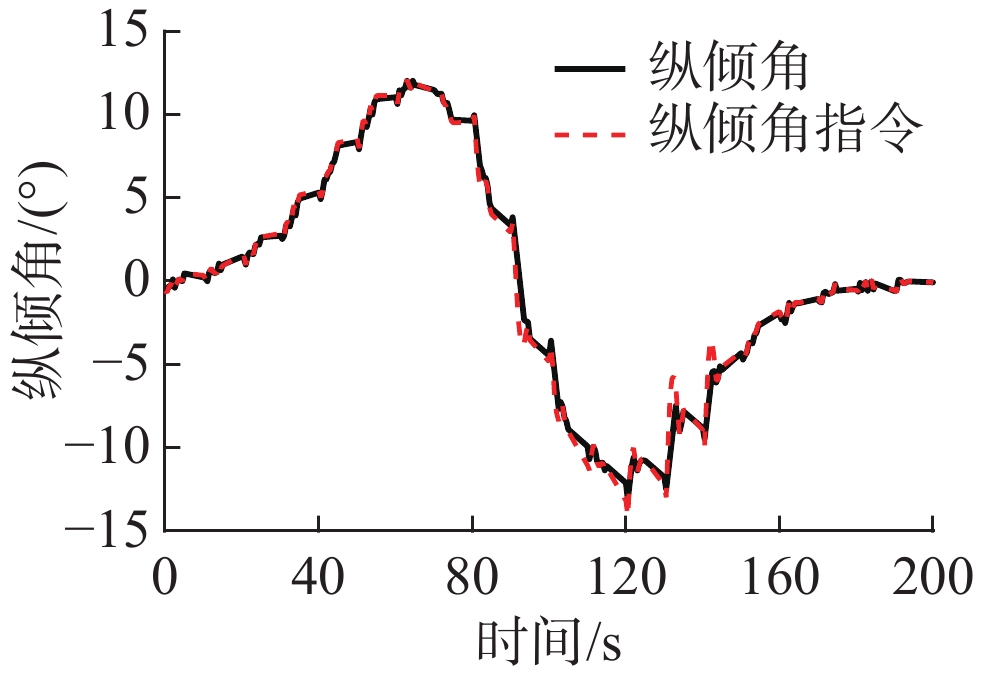
图 8 跟踪航行过程中纵倾指令及响应
Figure 8. Tracking longitudinal commands and responses during navigation
-
[1] 钱东, 赵江, 杨芸. 军用UUV发展方向与趋势(上)——美军用无人系统发展规划分析解读[J]. 水下无人系统学报, 2017, 25(2): 1-30.Qian Dong, Zhao Jiang, Yang Yun. Development trend of military UUV(Ⅰ): A review of U. S. military unmanned system development plan[J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 1-30. [2] Silvestre C, Cunha R, Paulino N, et al. A bottom-following preview controller for autonomous underwater vehicles[J]. IEEE Transactions on Control Systems Technology, 2008, 17(2): 257-266. [3] Melo J, Matos A. Bottom estimation and following with the MARES AUV[C]. Oceans. IEEE, 2012: 1-8. [4] Adhamimirhosseini A, Yazdanpanah M J, Aguiar A P. Automatic bottom-following for underwater robotic vehicles[J]. Automatica, 2014, 50(8): 2155-2162. doi: 10.1016/j.automatica.2014.06.003 [5] Kim K, Ura T. Terrain-adaptive optimal guidance for near-bottom survey by an autonomous underwater vehicle[C]// 2013 IEEE International Underwater Technology Symposium. Tokyo, Japan: IEEE, 2013. [6] 徐红丽, 陈巩. 基于传感器信息的AUV海底地形跟踪研究[J]. 自动化与仪表, 2016, 31(6): 5-9.Xu Hongli, Chen Gong. Autonomous underwater vehicle undersea bottom-following based on sensor information[J]. Automation & Instrumentation, 2016, 31(6): 5-9. [7] 李岳明, 万磊, 孙玉山, 等. 水下机器人高度信息融合与欠驱动地形跟踪控制[J]. 控制理论与应用, 2013, 30(1): 118-122.Li Yueming, Wan Lei, Sun Yushan, et al. Altitude information fusion and bottom-following control for underactuated autonomous underwater vehicle[J]. Control Theory & Applications, 2013, 30(1): 118-122. [8] 周易. UUV地形跟踪安全性评估及航行模式切换控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. [9] 夏正亚, 洪亮. 基于多项式拟合插值函数的码垛机器人轨迹规划[J]. 山东科学, 2016, 29(5): 117-123.Xia Zhengya, Hong Liang. Polynomial fitting interpolation function based trajectory planning for a palletizing robot[J]. Shandong Science, 2016, 29(5): 117-123. [10] 李践飞, 周智勇, 牛玉杰. 潜艇垂直面运动标准化仿真模型研究[J]. 船电技术, 2009, 29(3): 53-56.Li Jianfei, Zhou Zhiyong, Niu Yujie. Standardization of submarine vertical movement simulation model[J]. Marine Electric & Electronic Engineering, 2009, 29(3): 53-56. [11] 瞿佳伟, 张春雷, 张冀. 基于NSGA-Ⅱ和最小二乘原理的加工轨迹拟合算法[J]. 精密制造与自动化, 2019(2): 25-28, 52.Qu Jia-wei, Zhang Chun-lei, Zhang Yi. Machining trajectory fitting algorithm based on NSGA-Ⅱ and least squares principle[J]. Precise Manufacturing & Automation, 2019(2): 25-28, 52. [12] 姚连璧, 钱瑾斐. 基于移动最小二乘法的轨迹拟合切线方位角计算[J]. 同济大学学报(自然科学版), 2018, 46(11): 1589-1593.Yao Lianbi, Qian Jinfei. Trajectory tangent azimuth calculation based on moving least square fitting[J]. Journal of Tongji University(Natural Science), 2018, 46(11): 1589-1593. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 15
- HTML全文浏览量: 1
- PDF下载量: 0
- 被引次数: 0




