摘要:
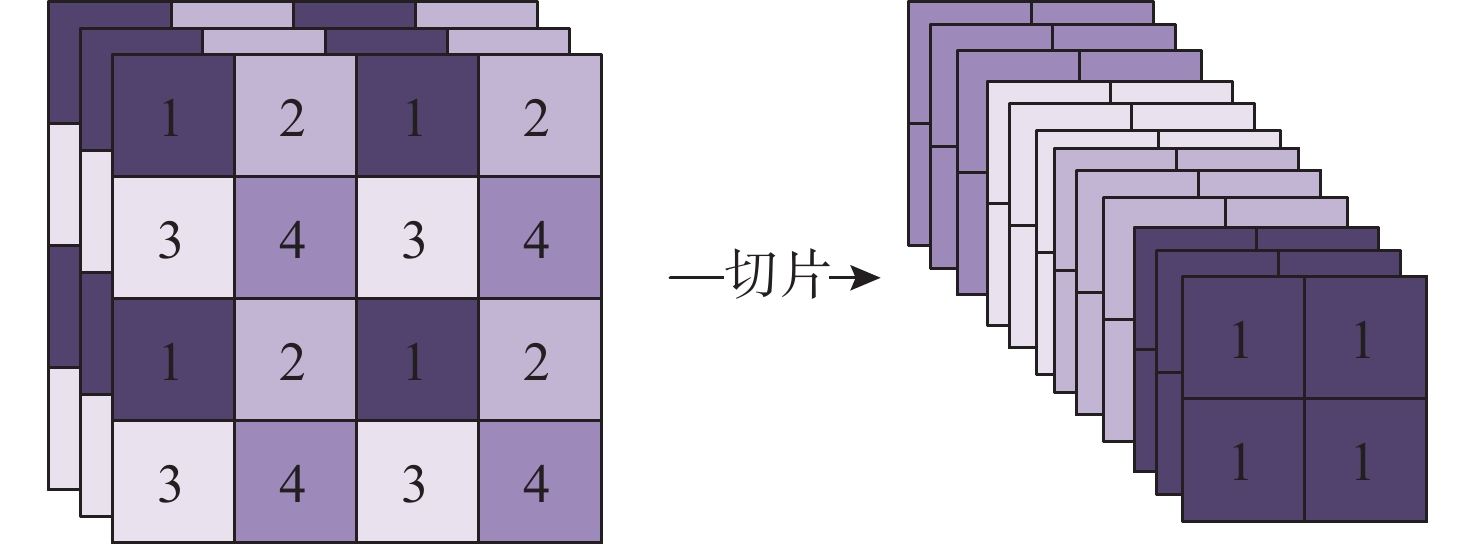
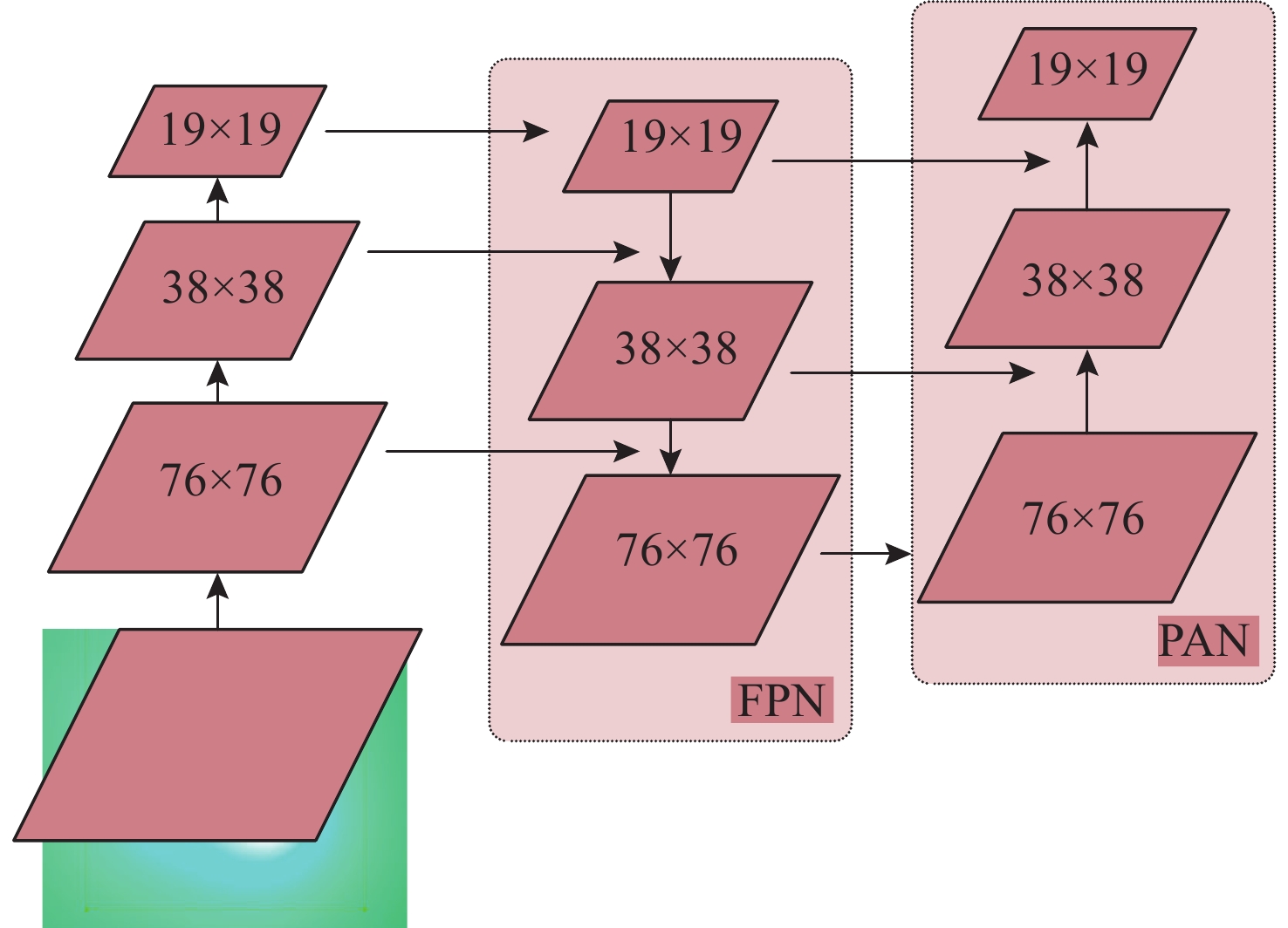
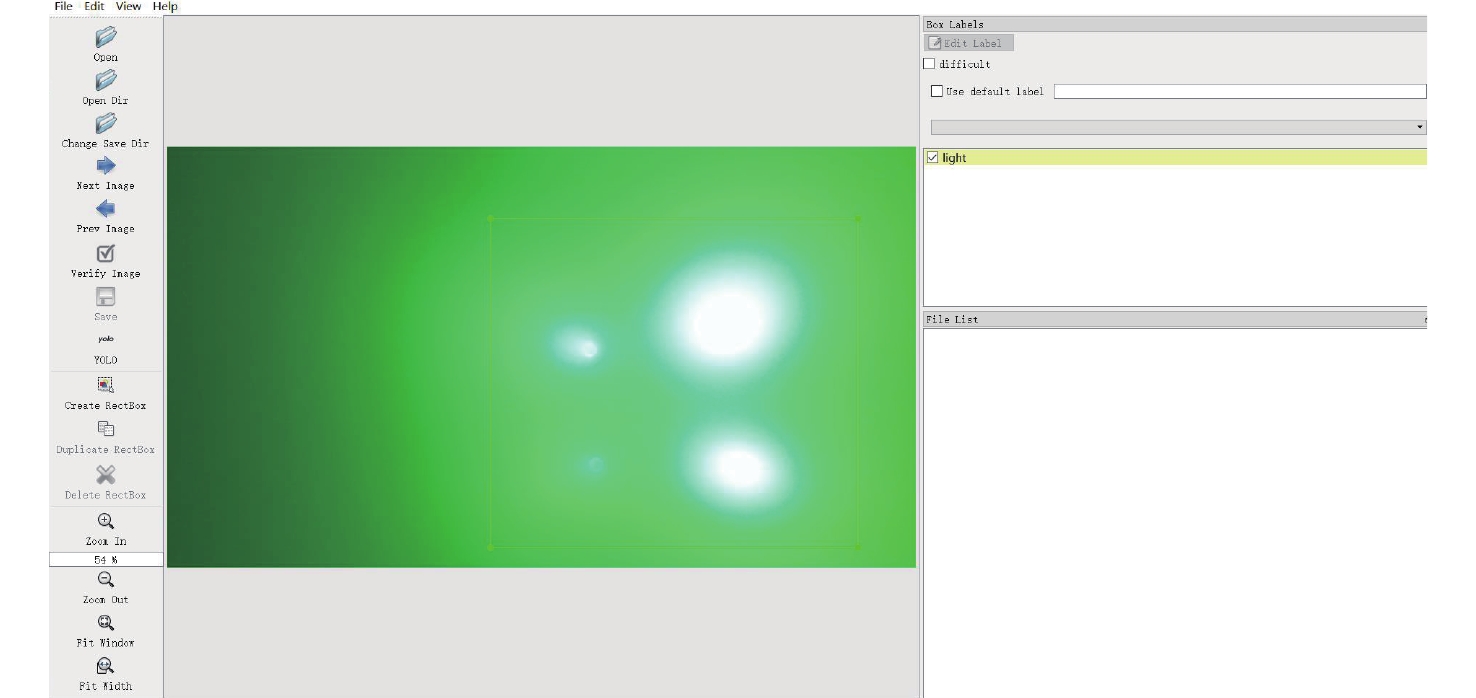
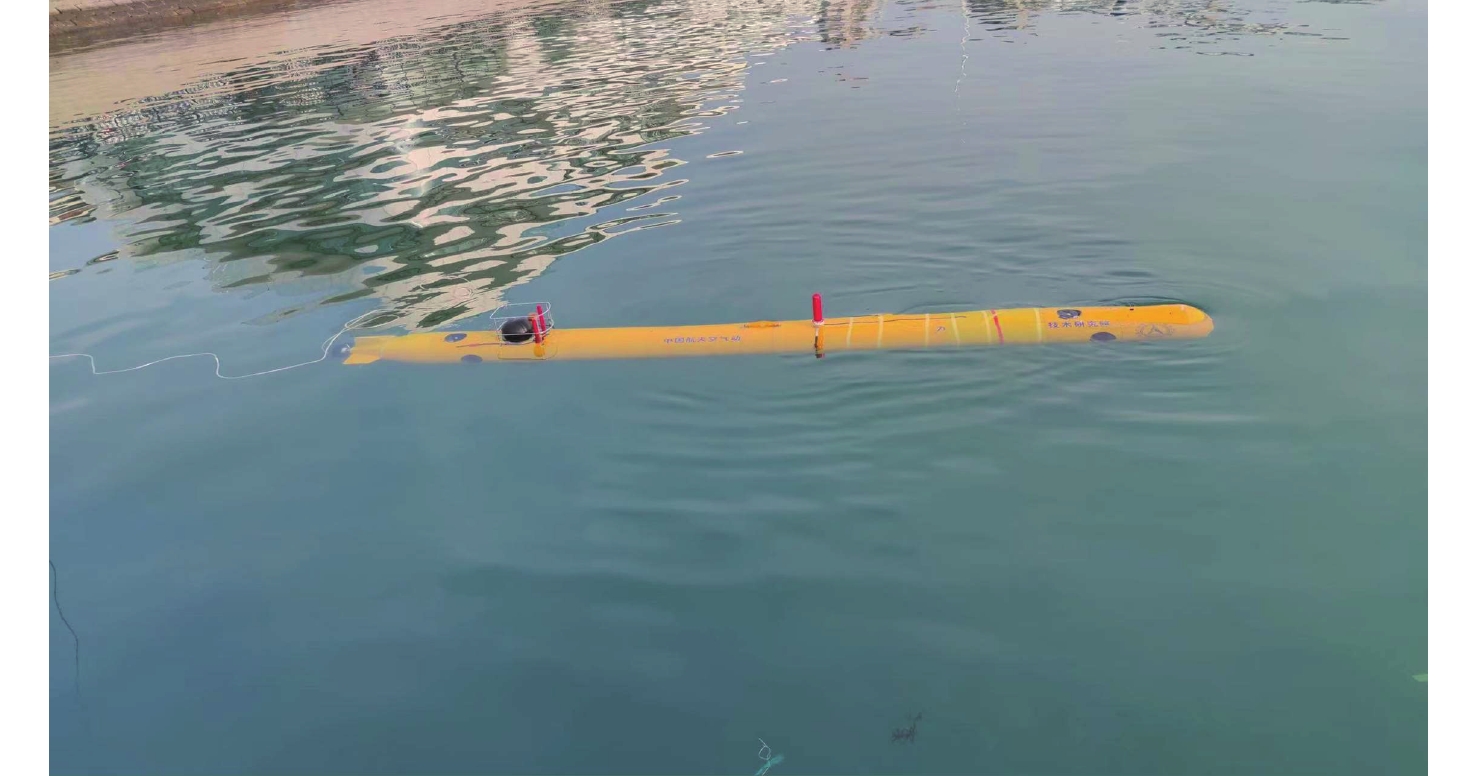
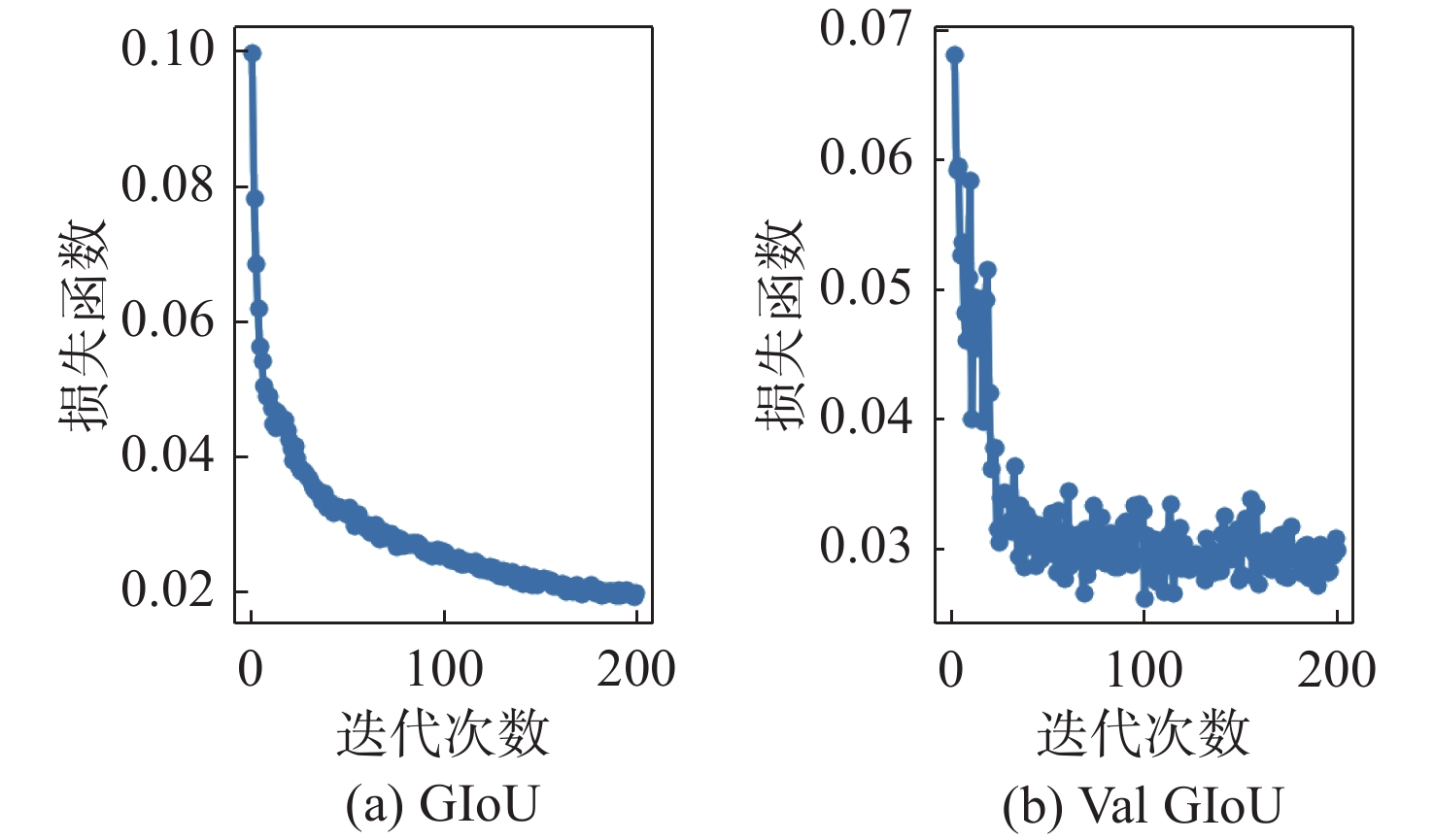
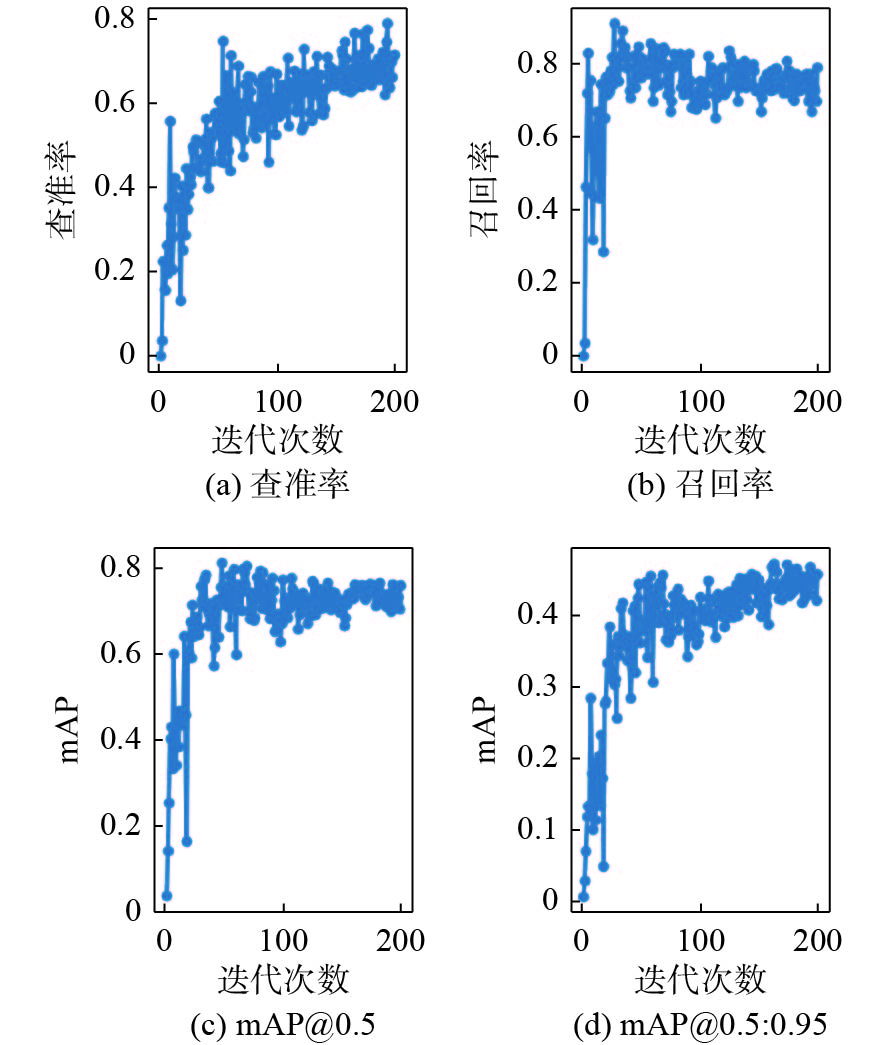
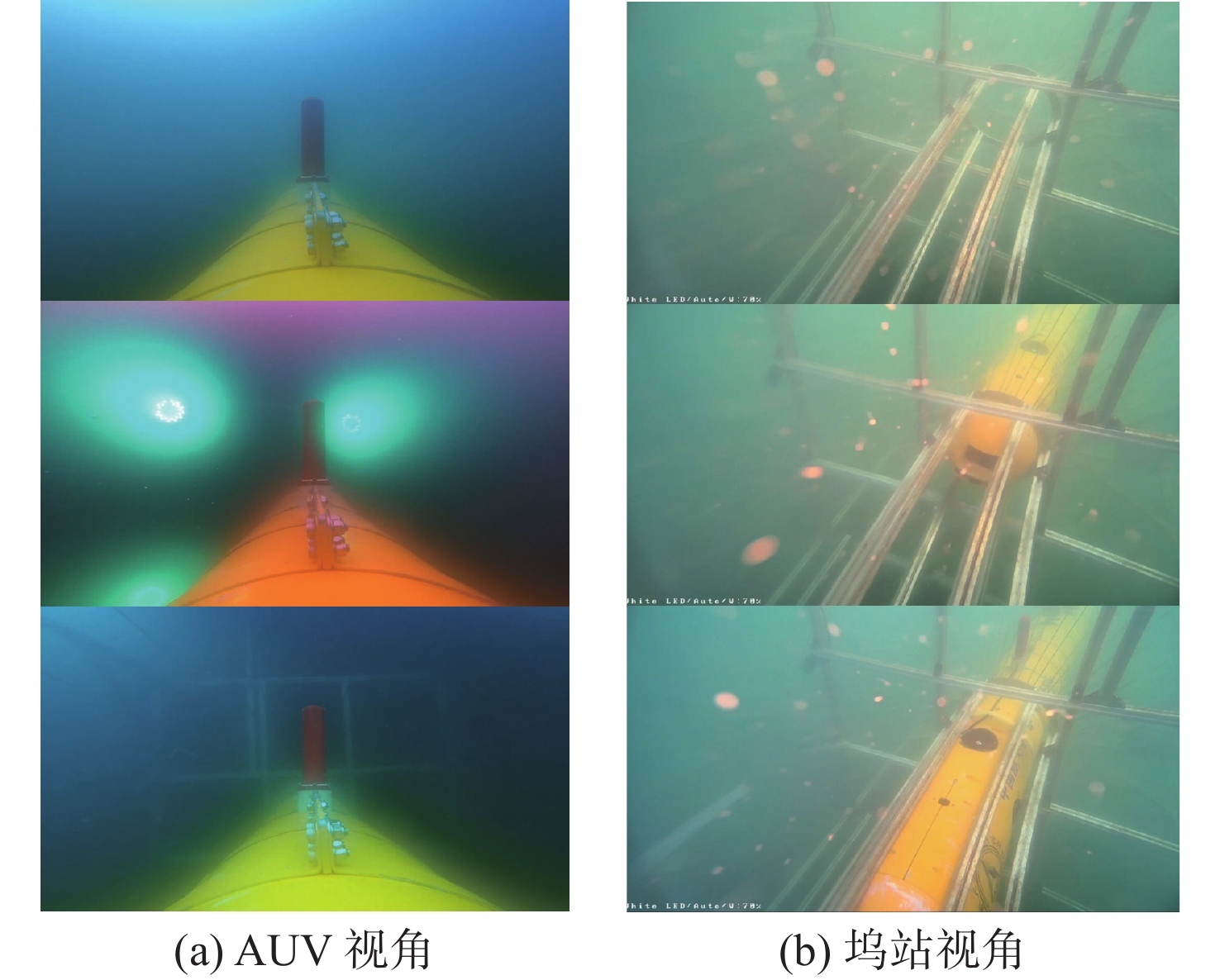
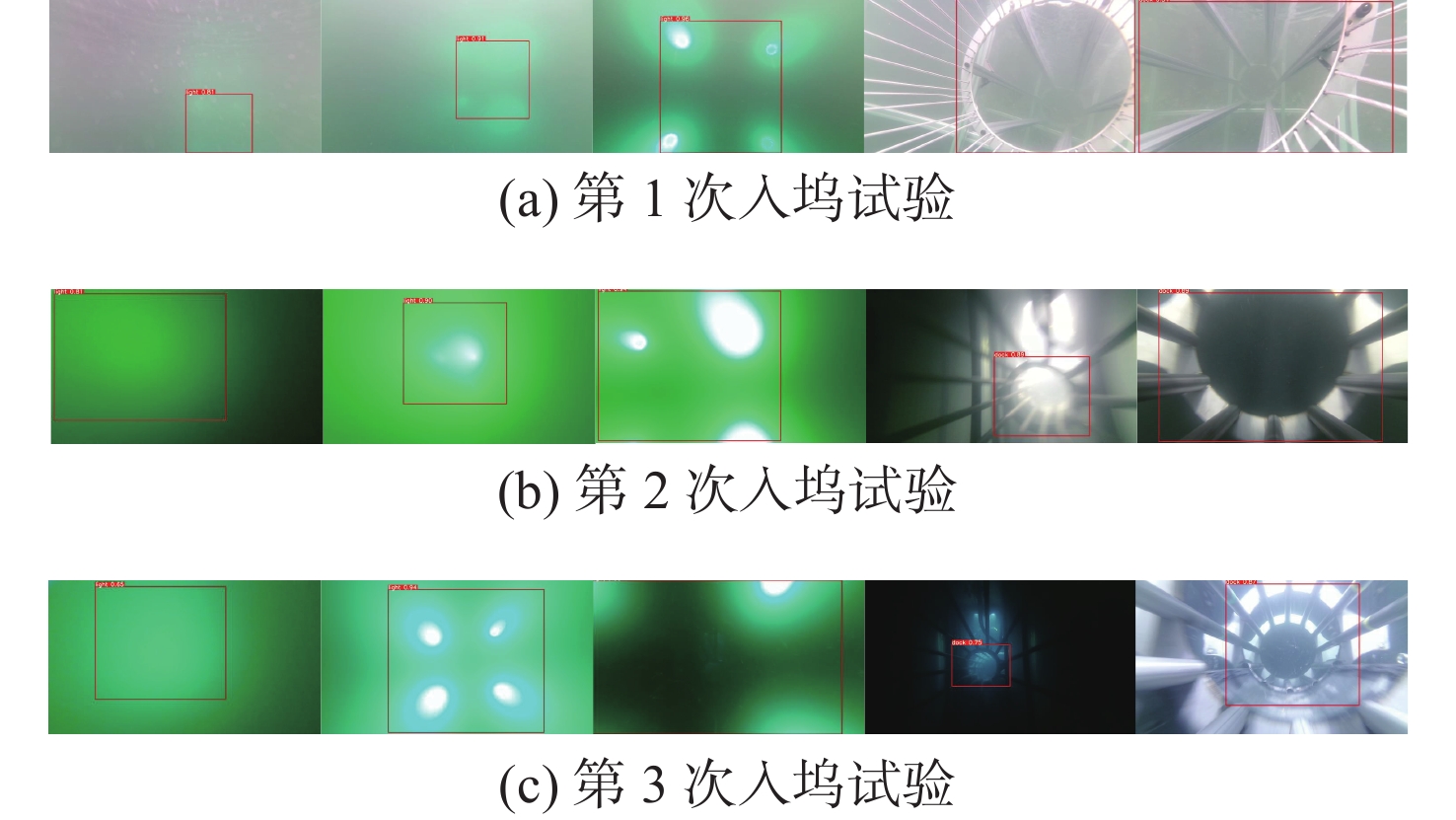
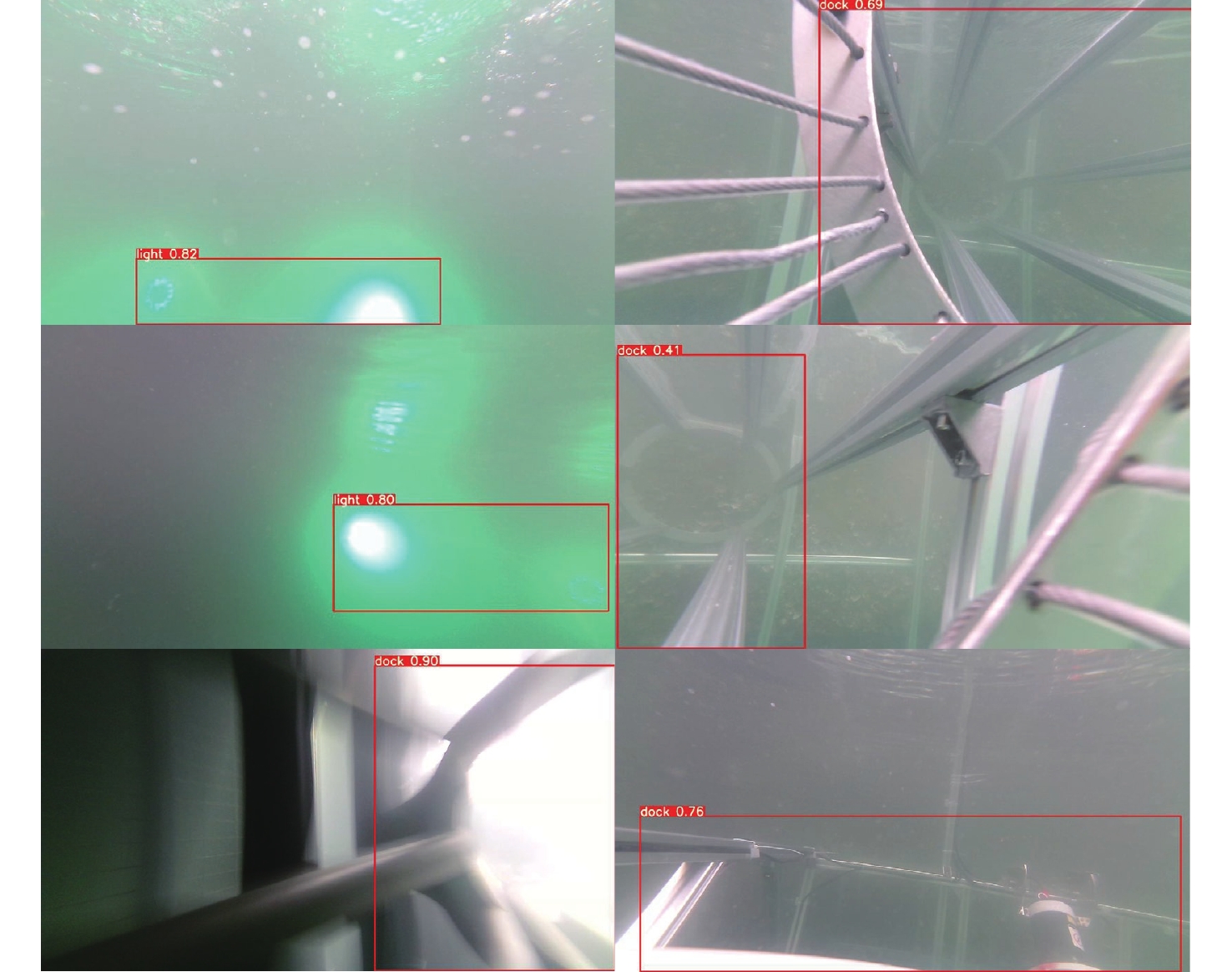
自主水下航行器(AUV)自主对接与回收技术主要通过导引定位的方式实现AUV与对接装置的自主归航、接近、对接及锁紧等动作。为满足AUV水下自主对接过程中实时性、高精确性和鲁棒性等要求, 提出一种基于深度学习的水下视觉导引检测方法。针对复杂水下场景下传统图像处理方法检测效果不佳的问题, 使用基于YOLOv5的深度学习视觉导引检测方法对导引光源以及对接装置进行检测。首先, 将目标图像数据接入YOLOv5模型进行迭代训练, 将训练得到的最优模型参数保存用于后续实时检测; 然后, 在水下自主对接过程中, AUV使用机器人操作系统平台实时读取水下数据并调用YOLO服务对水下图像进行检测, 输出导引光源以及对接装置位置信息; 同时通过位置解算, 将检测得到的中心点坐标转化到AUV相机坐标系下; 最后将解算得到的AUV与对接装置的相对位置与AUV的航行方向持续反馈给AUV, 进行引导直至对接完成。在海试中对水下视觉导引的实际检测准确率为97.9%, 检测单帧耗时为45 ms, 试验结果表明该方法满足自主对接与回收技术中对水下对接精度及实时性要求, 具有实际应用价值。
安平, 王亭亭, 赵渊, 等. 基于深度学习的AUV水下视觉导引检测方法[J]. 水下无人系统学报, 2023, 31(3): 421-429. doi: 10.11993/j.issn.2096-3920.202205006.