

Parameter Tuning Method for USV Rudder Steering PID Control Based on HCOPSO Algorithm
-
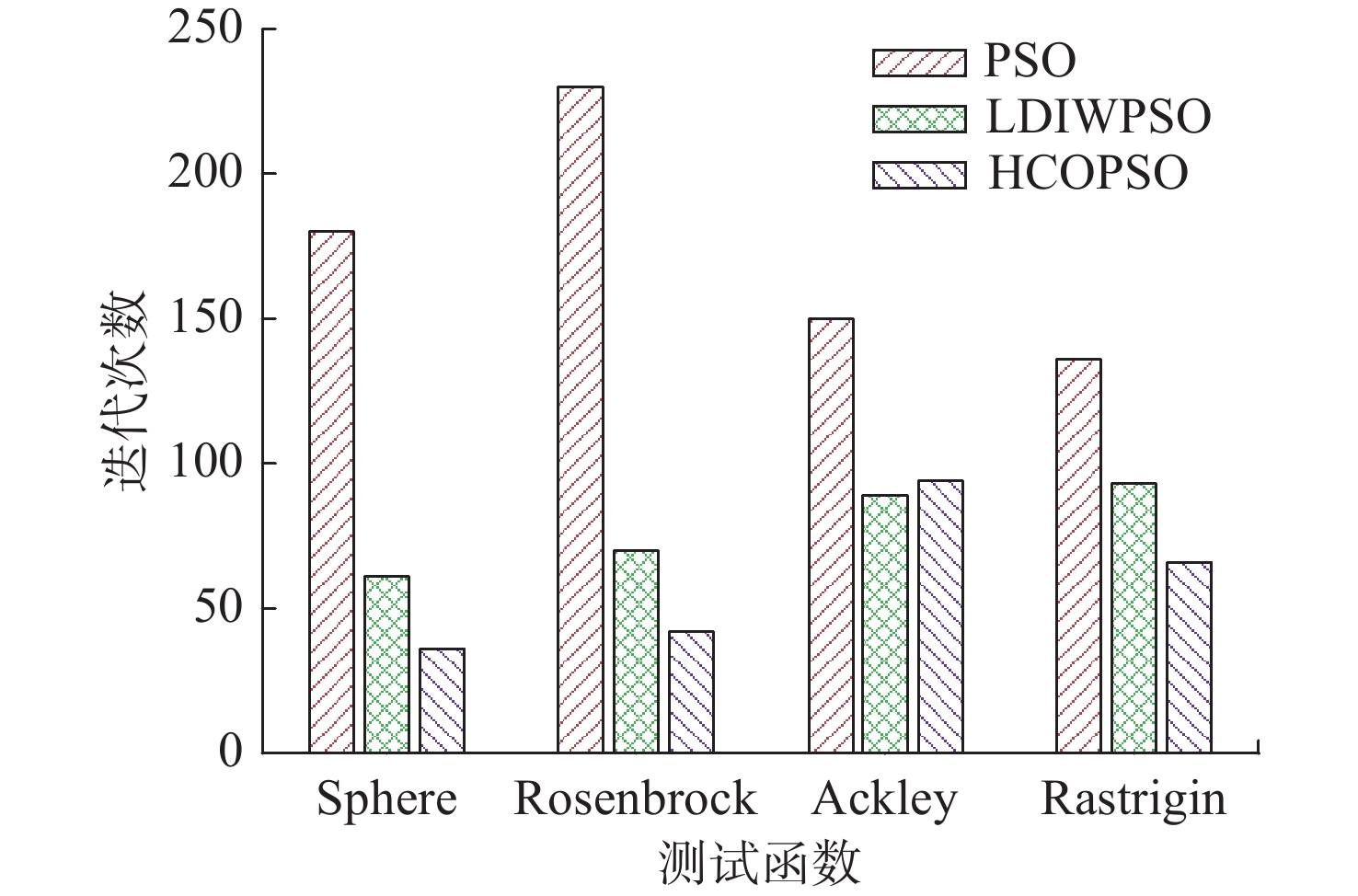
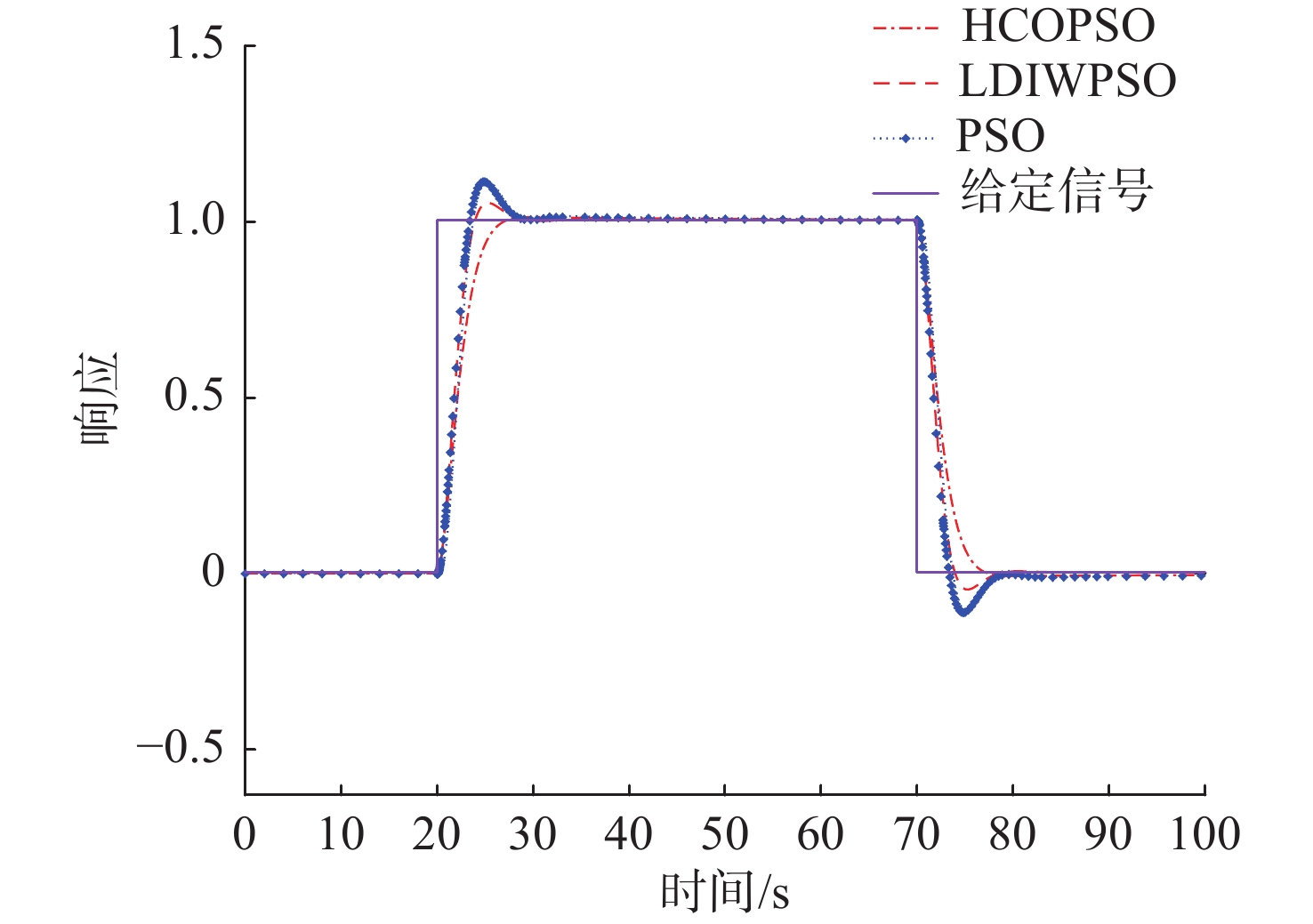
摘要: 高速无人艇(USV)舵向控制要求同时满足调节时间短、超调量小, 针对USV舵向比例积分微分(PID)控制的参数整定需求, 将混合均值中心反向学习粒子群优化(HCOPSO)算法与PID控制结合, 提出一种基于HCOPSO算法的USV舵向PID控制器参数整定方法。利用HCOPSO对PID控制器参数进行寻优, 有效解决寻优过程的局部最优解问题。对比研究了粒子群(PSO)算法、线性惯性权重递减粒子群(LDIWPSO)算法、HCOPSO算法的PID控制器参数整定效果, 结果表明, HCOPSO算法参数整定的USV舵向PID控制器具有更好的控制效果, 相比于PSO、LDIWPSO, 调节时间分别缩短22%、15%, 超调量分别降低89%、74%, 迭代次数分别减少40%、30%。基于研制的“久航750”USV开展了海洋环境测试, 测试结果表明了文中设计方法应用于小型高速USV舵向控制的有效性。Abstract: The rudder steering control of high-speed unmanned surface vessels(USVs) must simultaneously satisfy the requirements of a short adjustment time and small overshoot. To satisfy the parameter tuning requirements for rudder steering proportional integral derivative(PID) control of USVs, a parameter tuning method based on the hybrid mean center opposition-based learning particle swarm optimization(HCOPSO) algorithm was devised in this study. The HCOPSO algorithm was used to optimize the parameters of the PID controller, and this prevented the optimization process from becoming trapped in local optimal solutions. The PID controller parameter tuning effects of the particle swarm optimization(PSO), linear decreasing inertia weight particle swarm optimization(LDIWPSO), and HCOPSO algorithms were compared and studied. The results indicate that the USV rudder PID controller with the HCOPSO algorithm has the best control effect. Compared with those of PSO and LDIWPSO, the adjustment time is reduced by 22% and 15%, the overshoot is reduced by 89% and 74%, and the number of iterations is reduced by 40% and 30%, respectively. Using the developed Jiuhang 750 USV, a marine environment test was performed. The test results indicate that the proposed method is effective for the rudder steering control of small high-speed USVs.
-

图 1 小型高速USV舵向PID控制模型
Figure 1. PID control model for rudder steering of small high-speed unmanned surface vessels

图 2 基于HCOPSO算法的PID控制器参数优化流程
Figure 2. Parameter optimization process of PID controller based on HCOPSO algorithm

图 4 小型高速USV舵向PID控制仿真系统
Figure 4. Simulation system for rudder steering PID control of small high-speed unmanned surface vessels

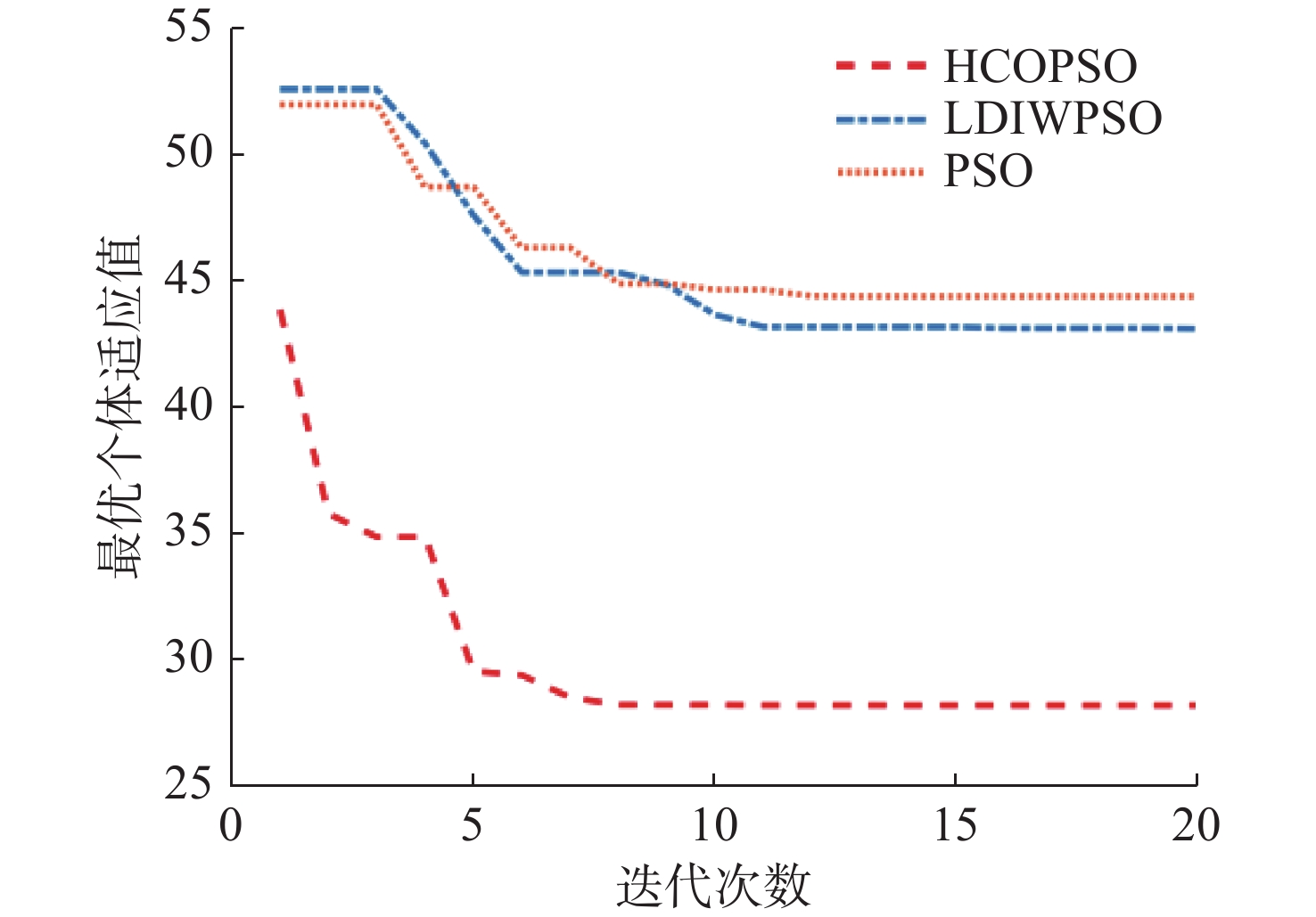
图 5 不同PSO算法的适应度值仿真结果
Figure 5. Simulation results of fitness values of different PSO algorithms

图 6 不同粒子群优化算法的PID输出响应曲线
Figure 6. PID output response curves of different particle swarm optimization algorithms

图 8 USV港池测试舵角设定值与反馈值对比
Figure 8. Comparison between the set value of rudder angle test and the feedback value of USV harbor basin

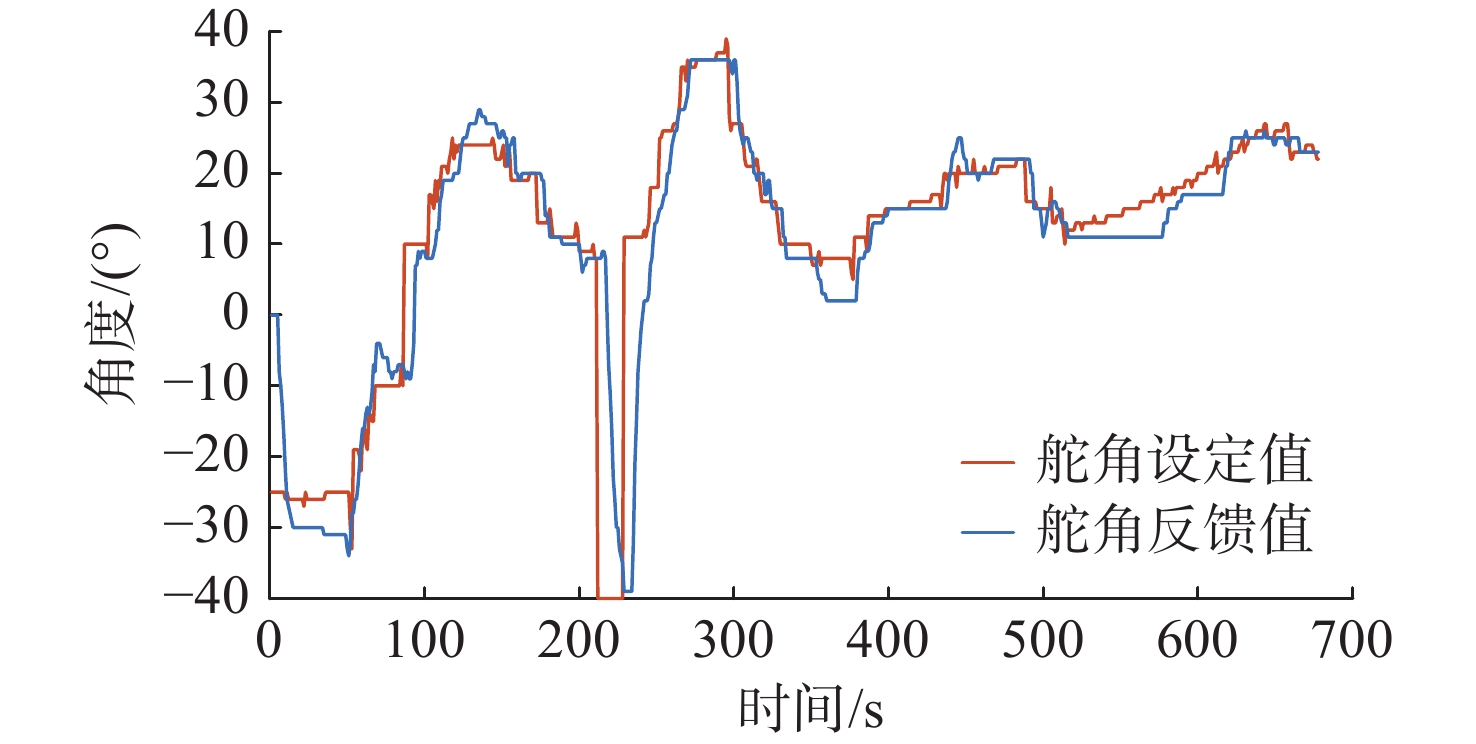
图 10 2~3级海况下舵角设定值与反馈值对比
Figure 10. Comparison of rudder angle set value and feedback value under level 2-3 sea conditions
表 1 算法运行时间
Table 1. Algorithm running time
单位: s 测试函数 PSO LDIWPSO HCOPSO Sphere 18.779 996 18.713 389 24.322 626 Rosenbrock 18.660 785 22.265 212 23.364 576 Ackley 18.675 984 18.713 375 19.188 532 Rastrigin 18.751 932 19.265 794 19.971 044  下载: 导出CSV
下载: 导出CSV
表 2 算法最佳适应度值
Table 2. Optimal fitness value of algorithm
单位: s 测试函数 PSO LDIWPO HCOPSO Sphere 0.042 446 0.018 751 0.000 328 Rosenbrock 18.274 087 19.066 910 0.630 621 Ackley 1.655 833 1.461 835 0.046 726 Rastrigin 27.907 762 19.712 504 0.232 082
下载: 导出CSV
表 3 不同算法优化整定的PID参数和输出响应结果
Table 3. PID parameters and output response results optimized by different algorithms
项目 PSO LDIWPSO HCOPSO $ {K_p} $ 10.583 3 25.858 0 21.052 3 $ {K_i} $ 0.002 0 0.001 2 0.000 6 $ {K_d} $ 20.674 2 50.000 0 50.000 0 超调量/% 11.3 4.7 1.2 调节时间/s 26.13 24.05 20.37 迭代次数 15 11 9
下载: 导出CSV
-
[1] 李家良. 水面无人艇发展与应用[J]. 火力与指挥控制, 2012, 37(6): 203-207. doi: 10.3969/j.issn.1002-0640.2012.06.053Li Jialiang. Development and application of unmanned surface vehicle[J]. Fire Control & Command Control, 2012, 37(6): 203-207. doi: 10.3969/j.issn.1002-0640.2012.06.053 [2] Yi G, Liu Z, Zhang J, et al. Research on underactuated USV path following algorithm[C]//2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference. Chongqing, China: IEEE, 2020: 2141-2145. [3] 祝川, 卢俊, 吴翔. 无人艇直驱式电液伺服舵机系统建模与仿真[J]. 舰船科学技术, 2019, 41(12): 87-92. doi: 10.3404/j.issn.1672-7649.2019.12.018Zhu Chuan, Lu Jun, Wu Xiang. Modeling and simulation of direct-drive electro-hydraulicServo steering-gear system of USV[J]. Ship Science and Technology, 2019, 41(12): 87-92. doi: 10.3404/j.issn.1672-7649.2019.12.018 [4] 张雪飞, 袁鹏, 谭俊哲, 等. 基于模糊PID的无人帆船航向控制方法[J]. 中国舰船研究, 2019, 14(6): 15-21.Zhang Xuefei, Yuan Peng, Tan Junzhe, et al. Heading control method of unmanned sailing boats based on fuzzy PID[J]. Chinese Journal of Ship Research, 2019, 14(6): 15-21. [5] Ashrafiuon H, Muske K R, McNinch L C, et al. Sliding-mode tracking control of surface vessels[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 4004-4012. doi: 10.1109/TIE.2008.2005933 [6] 陈霄, 周德超, 刘忠, 等. 欠驱动无人艇自适应滑模航迹跟踪控制[J]. 国防科技大学学报, 2018, 40(3): 127-134. doi: 10.11887/j.cn.201803020Chen Xiao, Zhou Dechao, Liu Zhong, et al. Adaptive sliding-mode trajectory tracking control of underactuated unmanned surface vessels[J]. Journal of National University of Defense Technology, 2018, 40(3): 127-134. doi: 10.11887/j.cn.201803020 [7] 张继荣, 张天. 基于改进粒子群算法的PID控制参数优化[J]. 计算机工程与设计, 2020, 41(4): 1035-1040. doi: 10.16208/j.issn1000-7024.2020.04.023Zhang Jirong, Zhang Tian. Optimization of PID control parameters based on improved particle group algorithm[J]. Computer Engineering and Design, 2020, 41(4): 1035-1040. doi: 10.16208/j.issn1000-7024.2020.04.023 [8] Li Z, Zuo J, Lv R, et al. A hybrid multi-group co-evolution intelligent optimization algorithm: PSO-GWO[C]//2021 IEEE International Conference on Electrical Engineering and Mechatronics Technology. Qingdao, China: IEEE, 2021: 607-611. [9] 戴文智, 杨新乐. 基于惯性权重对数递减的粒子群优化算法[J]. 计算机工程与应用, 2015, 51(17): 14-19. doi: 10.3778/j.issn.1002-8331.1412-0259 [10] 孙辉, 邓志诚, 赵嘉, 等. 混合均值中心反向学习粒子群优化算法[J]. 电子学报, 2019, 47(9): 1809-1818. doi: 10.3969/j.issn.0372-2112.2019.09.001Kong Hui, Deng Zhicheng, Zhao Jia, et al. Hybrid mean center opposition-based learning particle swarm optimization[J]. Acta Electronica Sinica, 2019, 47(9): 1809-1818. doi: 10.3969/j.issn.0372-2112.2019.09.001 [11] Yi G, Liu Z, Zhang J Q. Research on USV heading control method based on Kalman filter sliding mode control[C]//2020 Chinese Control and Decision Conference. Hefei, China: IEEE, 2020: 1547-1551. [12] Zhou L, Chen K, Chen Z, et al. Course control of unmanned sailboat based on BAS-PID algorithm[C]//2020 International Conference on System Science and Engineering. Kagawa, Japan: IEEE, 2020: 1-5. [13] 薛秦锷, 闫兆武, 庄淡盛, 等. 改进粒子群整定涵道式倾转两轴旋翼机横滚PID控制器[J]. 工业控制计算机, 2020, 33(12): 103-105. doi: 10.3969/j.issn.1001-182X.2020.12.039 [14] Shi Y, Eberhart R C. Parameter selection in particle swarm optimization[C]//Proceedings of the 7th International Conference on Evolutionary Programming. San Diego, CA, USA: IEEE, 1998: 591-600. [15] Tizhoosh H R. Opposition-based learning: A new scheme for machine intelligence[C]//International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce. Vienna, Austria: IEEE, 2005. -






 点击查看大图
点击查看大图

计量
- 文章访问数: 77
- HTML全文浏览量: 17
- PDF下载量: 19
- 被引次数: 0




