Dual-Station Tracking Algorithm for Small Underwater Targets Based on AIMM-UKF with Probability Lower Bound Constraint
-
摘要: 复杂水下环境存在界面散射、多途效应及强噪声, 导致小型水下航行器、蛙人等水下小目标的机动轨迹难以被实时精细跟踪。针对双观测站主动声呐协同跟踪系统, 文中提出一种结合概率下限约束的自适应多交互多模型(AIMM)-无迹卡尔曼滤波(UKF)算法。传统AIMM算法在目标长时稳态时, 向机动模型转移的先验概率衰减较大, 导致目标突发机动时易出现切换迟滞、误差增大的问题。为此, 文中所提算法在似然比修正基础上, 引入概率下限约束与判定窗二次修正机制。在长航时稳态段, 判定窗机制保障高稳态精度; 突发机动瞬间, 概率下限机制配合似然比放缩实现模型快速准确切换。蒙特卡洛仿真表明, 所提算法有效克服了概率过度吸收退化问题, 降低了机动初期误差峰值, 全局位置与速度误差均达最低, 实现了瞬态切换与稳态精度的最佳平衡, 为水下小目标连续跟踪与安防预警提供了有力技术支撑。Abstract: The complex underwater environment featuring boundary scattering, multipath effects, and strong noise makes it difficult to achieve real-time and precise tracking of the maneuvering trajectories of underwater small targets such as unmanned underwater vehicles and frogmen. Targeting the dual-station active sonar cooperative tracking system, this paper proposed an adaptive interacting multiple model-unscented Kalman filter(AIMM-UKF) algorithm incorporating probability lower bound constraints. In traditional AIMM algorithms, when a target remains in a long-term steady state, the prior probability of transitioning to a maneuvering model decays greatly, leading to switching hysteresis and increased tracking errors during sudden maneuvers. To mitigate this issue, this paper innovatively introduced a probability lower bound constraint and a decision-window secondary correction mechanism based on likelihood ratio modification. During long-endurance steady-state periods, the decision-window mechanism guaranteed high steady-state precision; at the instant of sudden maneuvers, the probability lower bound mechanism cooperated with likelihood ratio scaling to achieve rapid and accurate model switching. Monte Carlo simulations demonstrate that the proposed algorithm effectively overcomes the degradation problem caused by excessive probability absorption. It reduces the peak error during the initial maneuvering stage, achieves the lowest global position and velocity errors, and attains an optimal balance between transient switching and steady-state accuracy. This provides robust technical support for the continuous tracking and security early warning of underwater small targets.
-
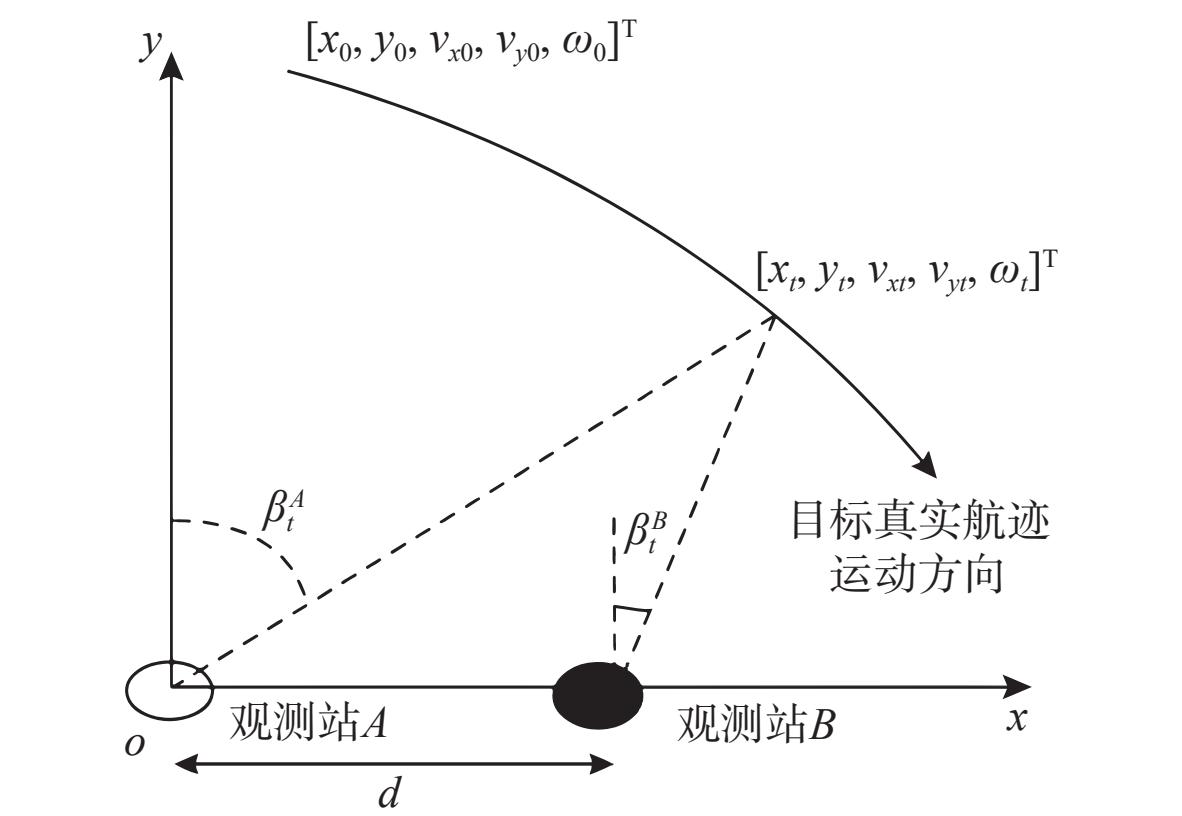
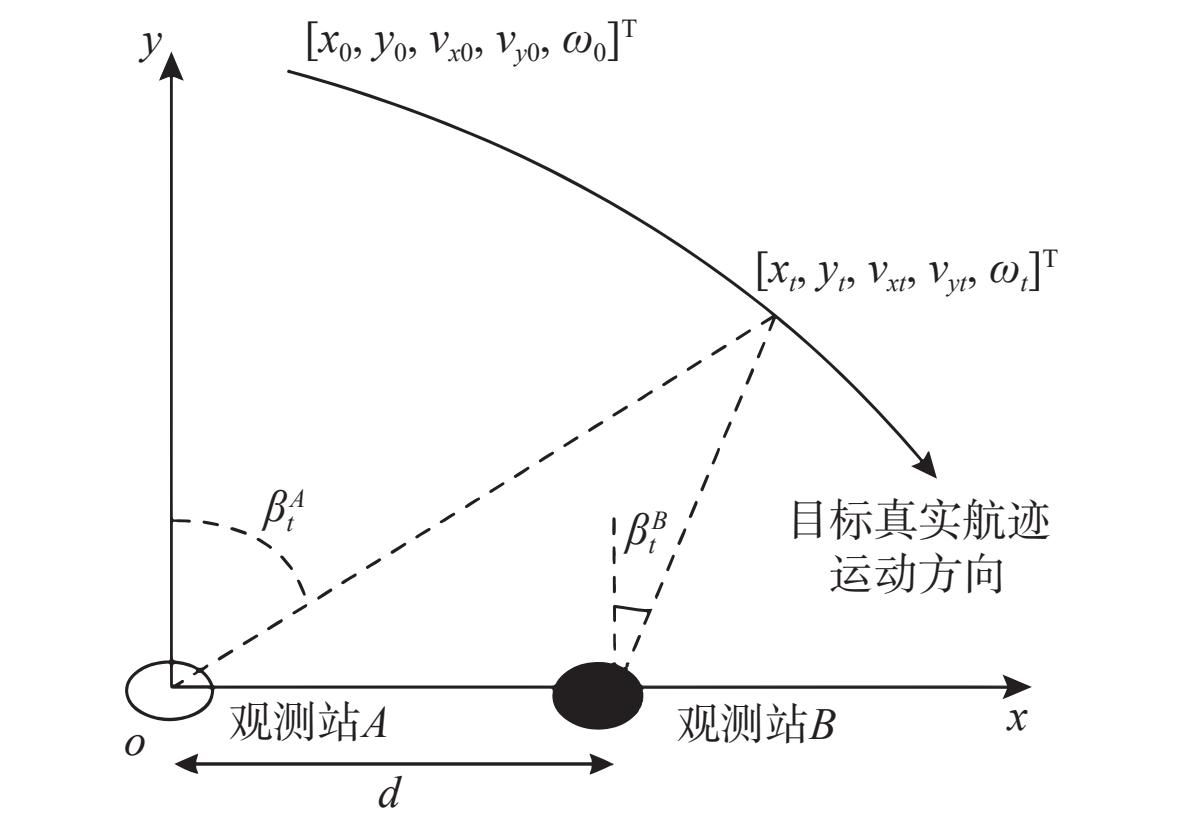
图 1 追踪目标与观测站几何关系图
Figure 1. Geometricrelationship diagram between tracking target and observation stations
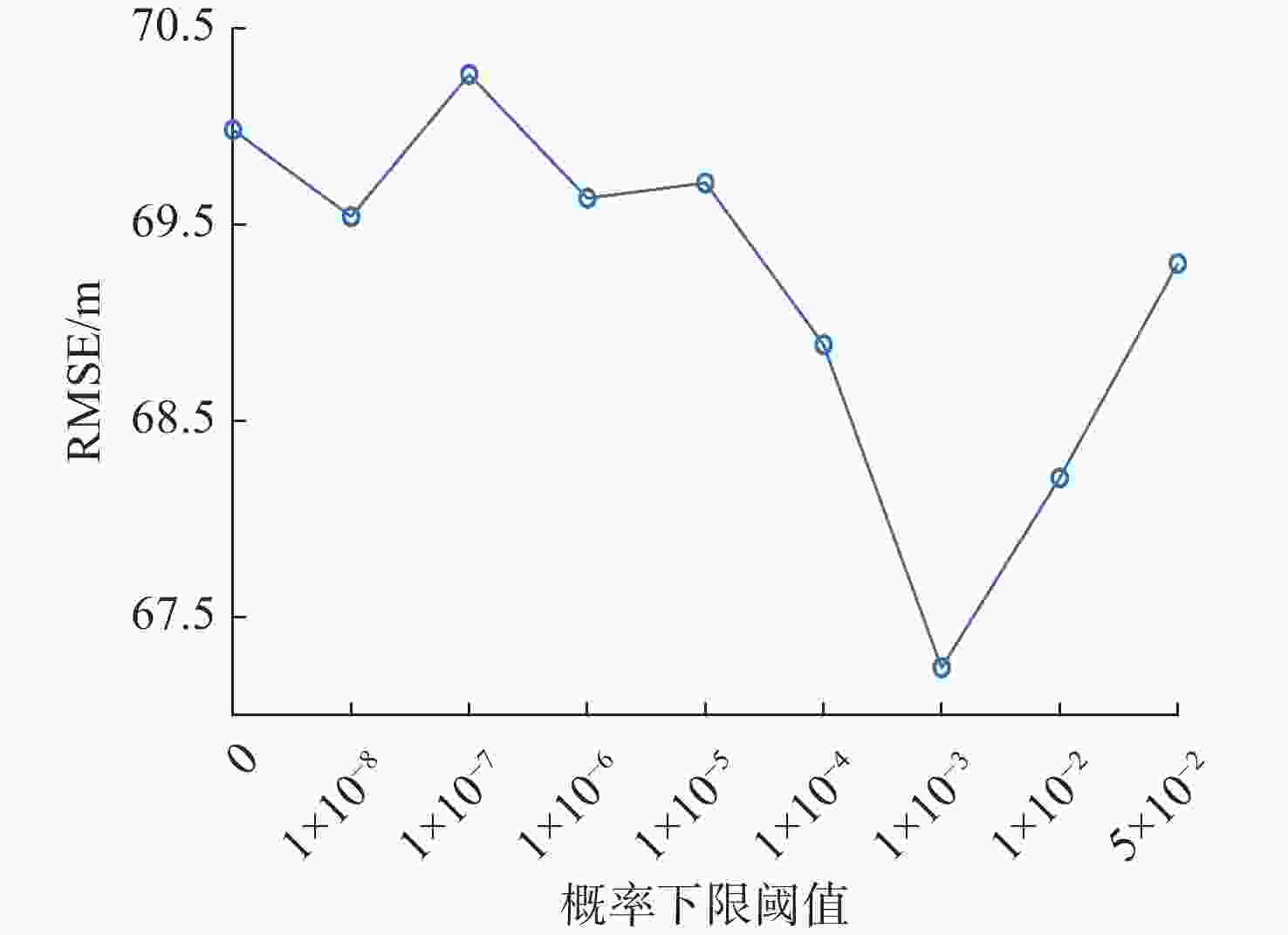
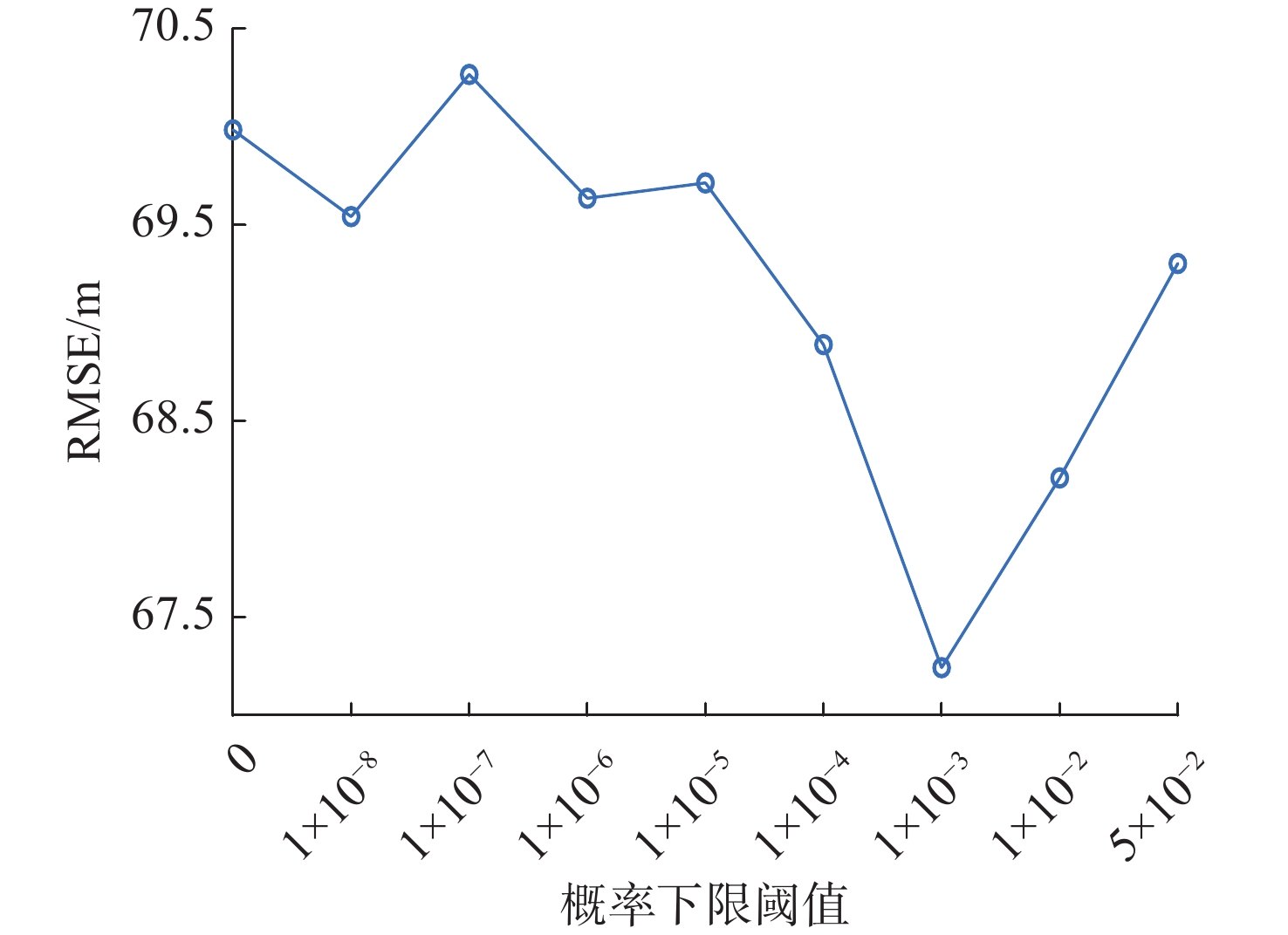
图 2 全局位置均方根误差随概率下限阈值变化曲线
Figure 2. Curve of global position root mean square error versus probability lower bound threshold
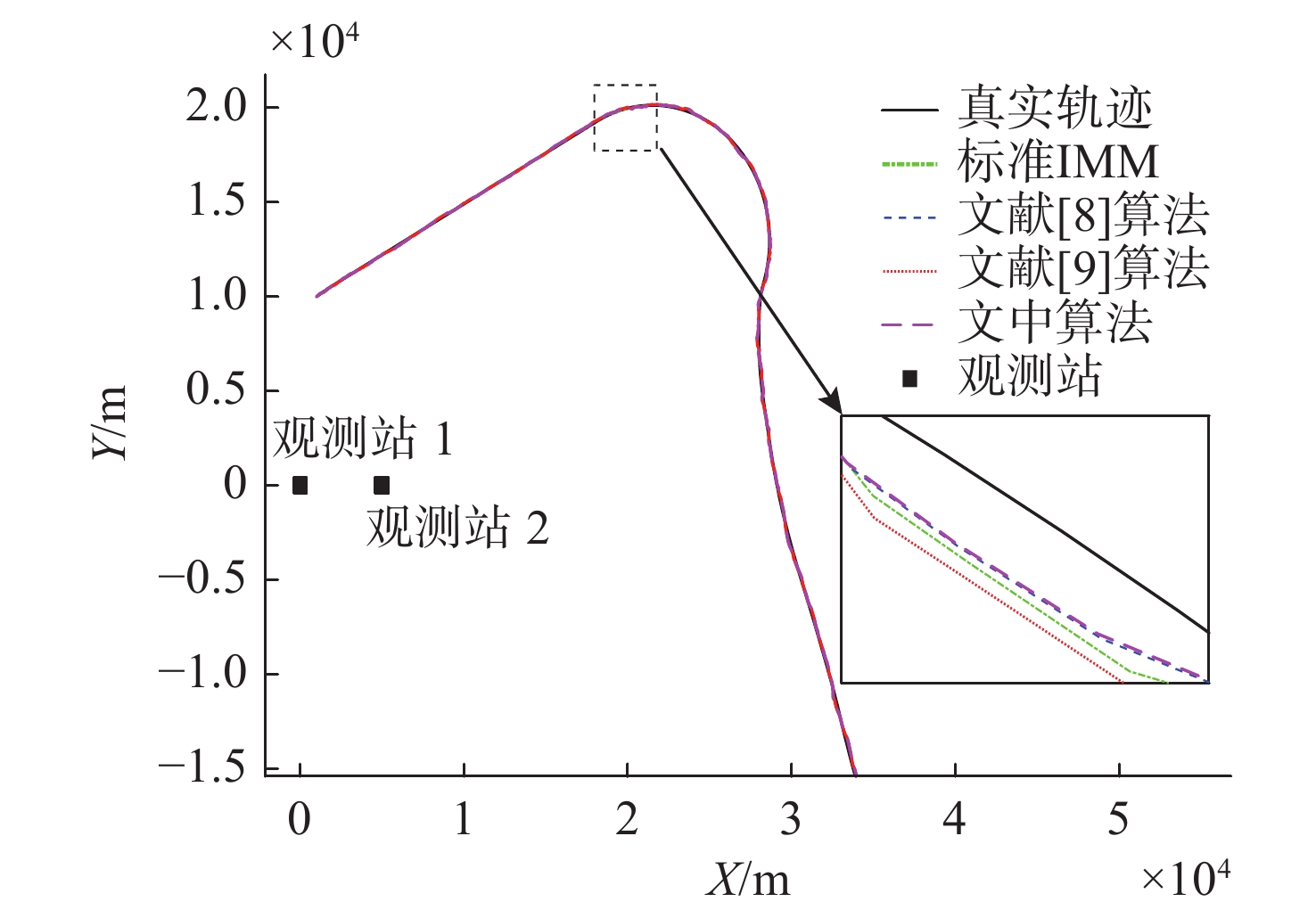
图 3 各算法目标跟踪轨迹对比
Figure 3. Comparsion of target tracking trajectories for different algorithms
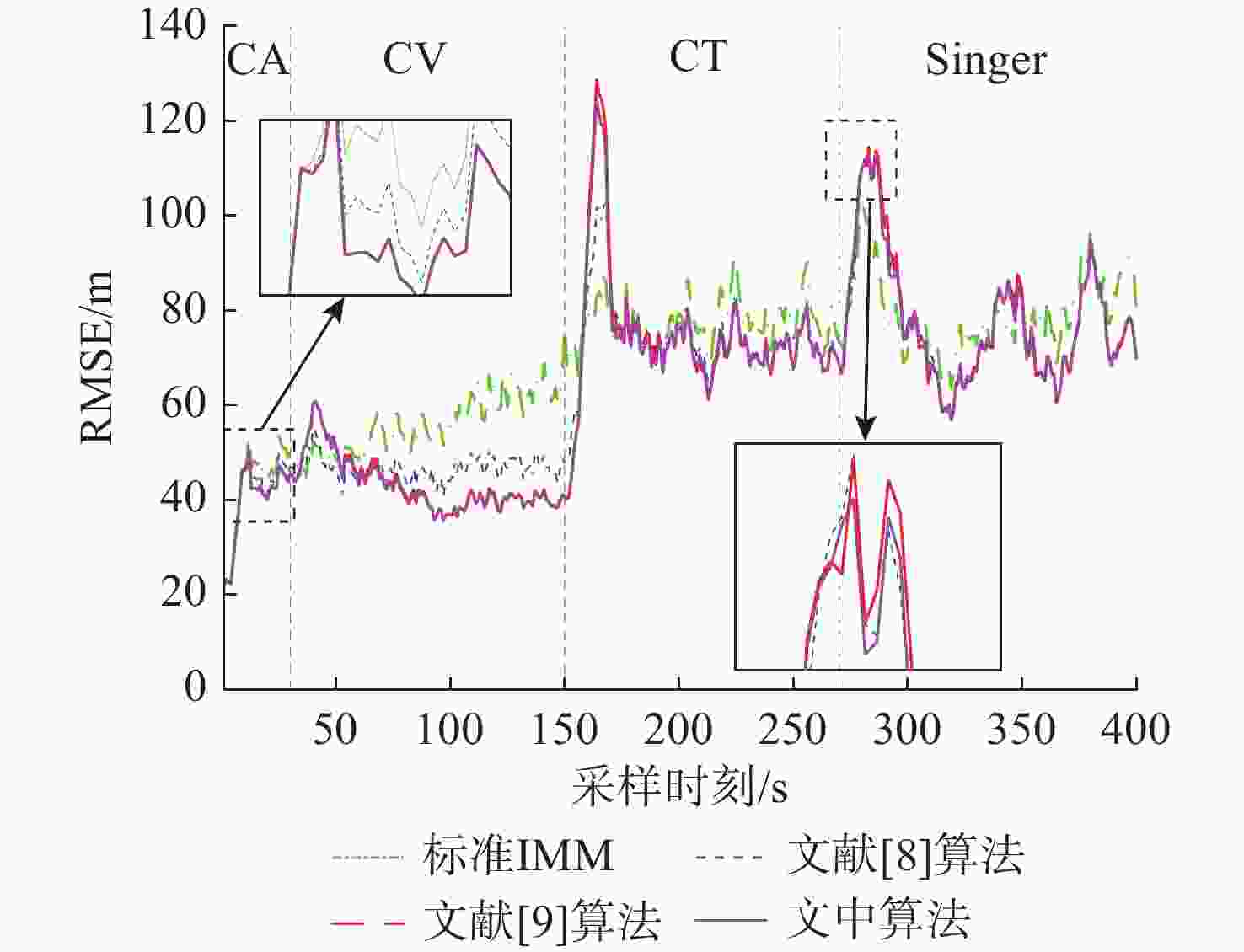
图 4 不同算法位置均方根误差对比
Figure 4. Comparsion of position root mean square error for different alogrithms
-
[1] Lu S, Chen Y, Chen F, et al. Cognitive continuous tracking algorithm for centralized multistatic sonar systems[C]//2021 OES China Ocean Acoustics, 2021: 1021-1026. [2] 成春彦, 李亚安. EKF和UKF算法在双观测站纯方位目标跟踪中的应用[J]. 水下无人系统学报, 2023, 31(3): 388-397. doi: 10.11993/j.issn.2096-3920.202203014Cheng C Y, Li Y A. Applications of EKF and UKF algorithms in bearings-only target tracking with a double observation stations[J]. Journal of Unmanned Undersea Systems, 2023, 31(3): 388-397. doi: 10.11993/j.issn.2096-3920.202203014 [3] 赵振轶, 李亚安, 陈晓, 等. 基于双观测站的水下机动目标被动跟踪[J]. 水下无人系统学报, 2018, 26(1): 40-45. doi: 10.11993/j.issn.2096-3920.2018.01.007Zhao Z Y, Li Y A, Chen X, et al. Passive tracking of underwater maneuvering target based on double observation station[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 40-45. doi: 10.11993/j.issn.2096-3920.2018.01.007 [4] Yunita M, Suryana J, Izzuddin A. Error performance analysis of IMM-Kalman filter for maneuvering target tracking application[C]//2020 6th International Conference on Wireless and Telematics, 2020: 1-6. [5] 张文, 孙瑞胜. EKF与UKF的性能比较及应用[J]. 南京理工大学学报, 2015, 39(5): 614-618. doi: 10.14177/j.cnki.32-1397n.2015.39.05.017Zhang W, Sun R S. Research on performance comparison of EKF and UKF and their application[J]. Journal of Nanjing University of Science and Technology, 2015, 39(5): 614-618. doi: 10.14177/j.cnki.32-1397n.2015.39.05.017 [6] Teng W. Radar tracking simulation numerical model based on improved Kalman filter EKF algorithm[C]//2023 5th International Conference on Artificial Intelligence and Computer Applications, 2023: 836-840. [7] 徐辛超, 姜姗姗. 鲁棒无迹卡尔曼滤波组合导航定位方法[J]. 测绘科学, 2023, 48(1): 16-22.Xu X C, Jiang S S. Robust unscented Kalman filter integrated navigation localization method[J]. Science of Surveying and Mapping, 2023, 48(1): 16-22. [8] 叶瑾, 许枫, 杨娟, 等. 一种改进的时变转移概率AIMM跟踪算法[J]. 应用声学, 2020, 39(2): 246-252. doi: 10.11684/j.issn.1000-310X.2020.02.011Ye J, Xu F, Yang J, et al. An improved AIMM tracking algorithm based on adaptive transition probability[J]. Journal of Applied Acoustics, 2020, 39(2): 246-252. doi: 10.11684/j.issn.1000-310X.2020.02.011 [9] 王平波, 刘杨. 基于改进自适应IMM-UKF算法的水下目标跟踪[J]. 电子与信息学报, 2022, 44(6): 1999-2005. doi: 10.11999/JEIT211128Wang P B, Liu Y. Underwater target tracking algorithm based on improved adaptive IMM-UKF[J]. Journal of Electronics & Information Technology, 2022, 44(6): 1999-2005. doi: 10.11999/JEIT211128 [10] 许跃千. 基于非线性滤波的水下目标跟踪技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2019: 18-20. [11] 李胤. 基于方位和时延量测的水下目标跟踪技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2024: 16-19. [12] 王威, 宫淑丽, 李晓明. 基于AIMM-CKF的机动目标跟踪算法[J]. 电光与控制, 2025, 32(5): 1-6. doi: 10.3969/j.issn.1671-637X.2025.05.001Wang W, Gong S L, Li X M. A maneuvering target tracking algorithm based on AIMM-CKF[J]. Electronics Optics & Control, 2025, 32(5): 1-6. doi: 10.3969/j.issn.1671-637X.2025.05.001 [13] 兰朝凤, 张桐基, 陈欢. 时序信息驱动的并行交互式多模型水下目标跟踪算法[J]. 电子与信息学报, 2025, 47(8): 2685-2693.Lan Z F, Zhang T J, Chen H. Parallel interactive multiple model underwater target tracking algorithm driven by sequential information[J]. Journal of Electronics & Information Technology, 2025, 47(8): 2685-2693. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 171
- HTML全文浏览量: 87
- PDF下载量: 105
- 被引次数: 0