1D ViT-ResNet Method for Magnetic Source Localization of Small Ferromagnetic Targets on Shallow Seabeds
-
摘要: 为解决复杂浅海环境下磁信号采集难题, 文中设计并搭建了一套分体式拖曳系统, 搭载磁通门阵列, 高效采集运动状态下的海洋磁环境噪声和4类典型铁磁小目标的磁异常信号, 成功构建实测数据集。为弥补实测数据的局限性并扩充数据多样性, 结合实测数据特性, 利用COMSOL多物理场仿真软件构建了包含4类目标磁源通过特征曲线的仿真数据集, 为模型训练提供数据支撑。针对磁源实时检测和定位需求, 文中研究提出了基于一维视觉注意力机制(1D-ViT)检测模型与一维残差网络(1D-ResNet)定位模型协同的磁源定位方法1D ViT-ResNet。经实测目标信号验证结果表明, 该算法实现了约7%的定位估计误差均值; 与单模型相比, 双模型方法可使误检率平均降低11个百分点, 显著提升了水下磁探测的精确性和可靠性。Abstract: To address the challenges of magnetic signal acquisition in complex shallow-sea environments, this study designed and constructed a split towed system equipped with a fluxgate array. This system efficiently collected magnetic environmental noise and magnetic anomaly signals from four typical small ferromagnetic targets under dynamic conditions, successfully establishing a corresponding real-world measurement dataset. To compensate for the limitations of measured data and enhance data diversity, based on the characteristics of measured data, a simulation dataset containing the passage characteristic curves of four types of target magnetic sources was constructed using COMSOL multiphysics simulation software, providing data support for model training. To meet the requirements of real-time detection and localization of magnetic sources, this study proposed a magnetic source localization method, named 1D ViT-ResNet, based on the collaboration of a one-dimensional vision transformer(1D-ViT) detection model and a one-dimensional residual network(1D-ResNet) localization model. Validation results using measured target signals show that the algorithm achieves a mean localization estimation error of approximately 7%. Compared with single-model approaches, the dual-model method reduces the false detection rate by an average of 11 percentage points, significantly improving the accuracy and reliability of underwater magnetic detection.
-
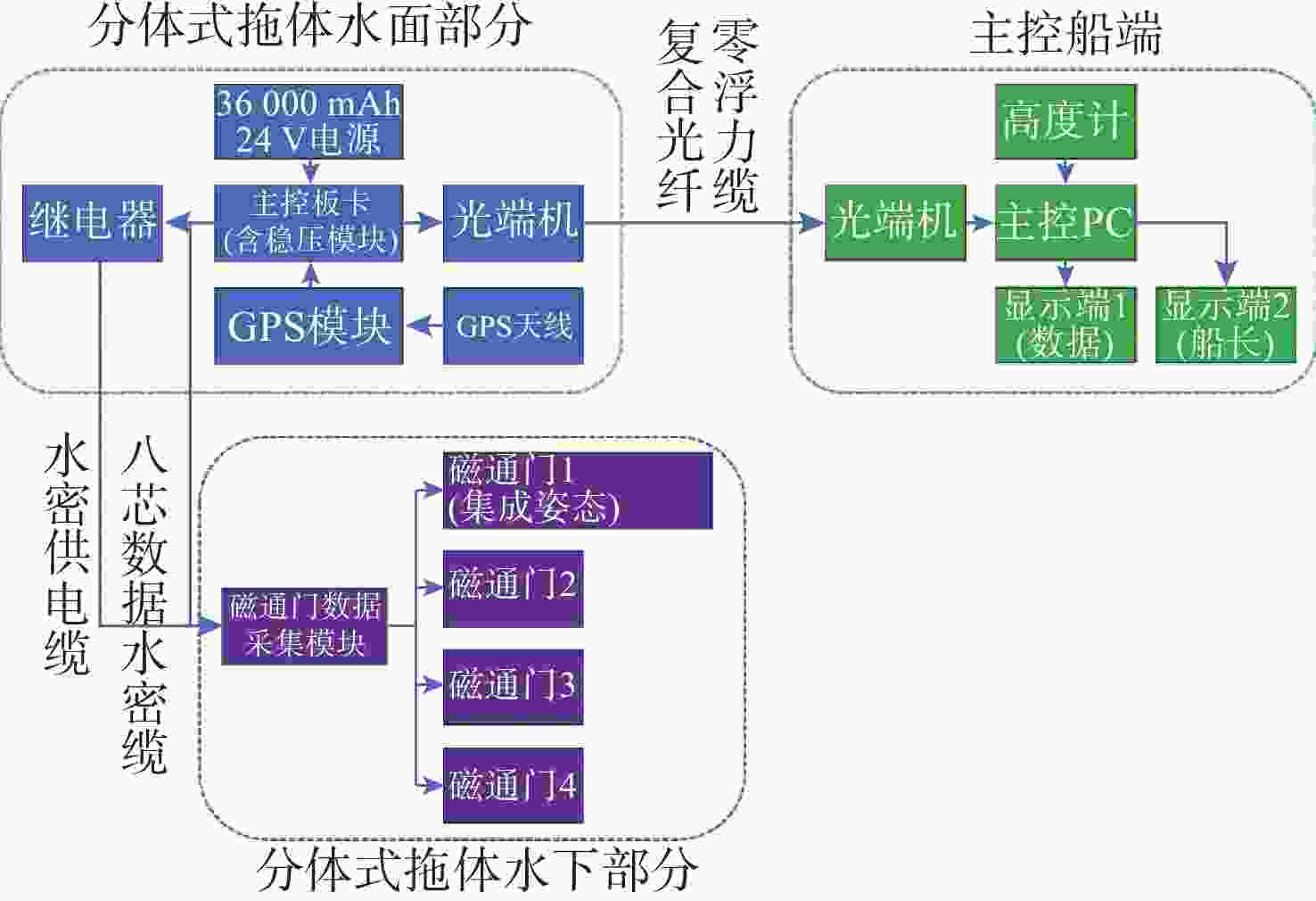
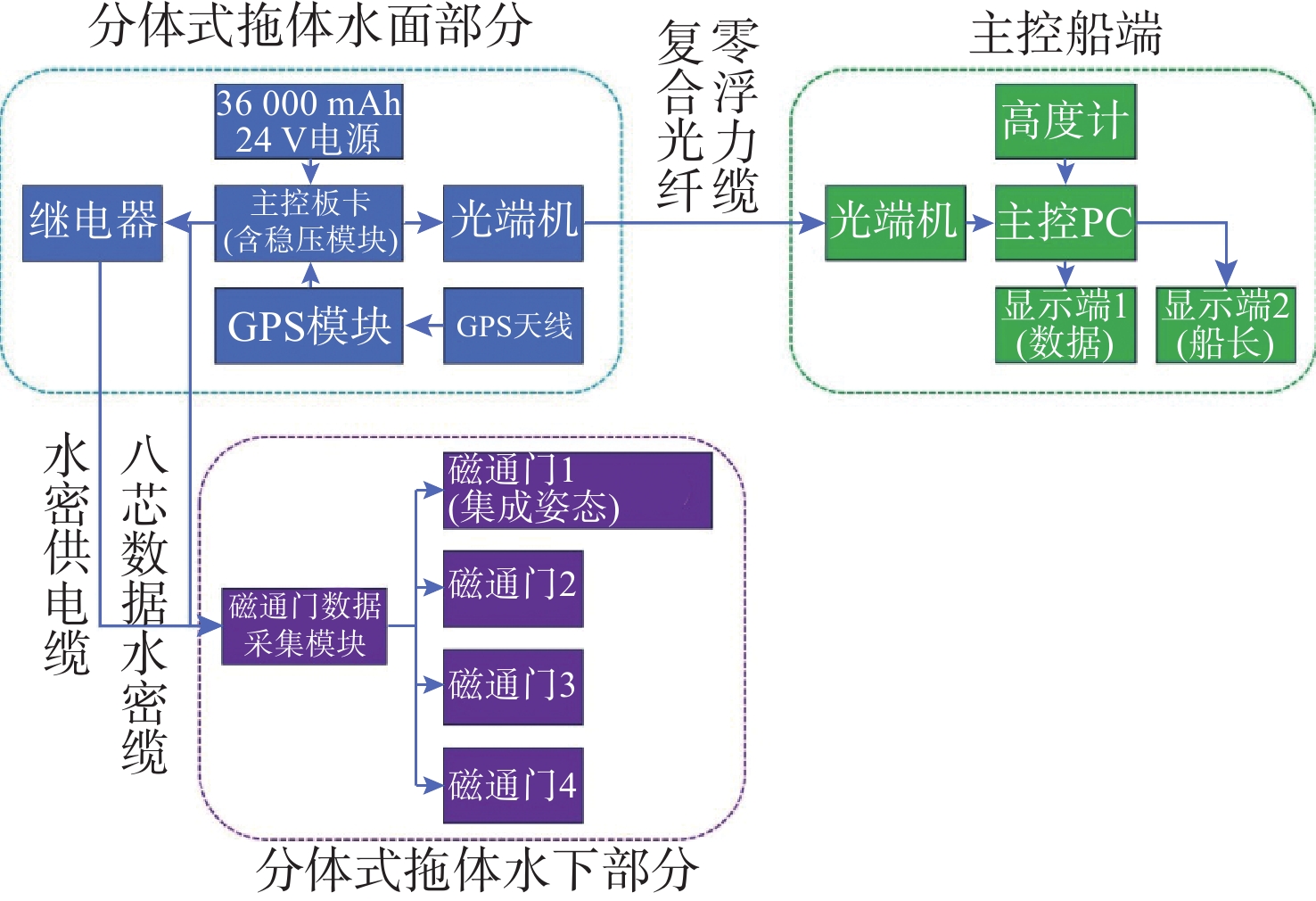
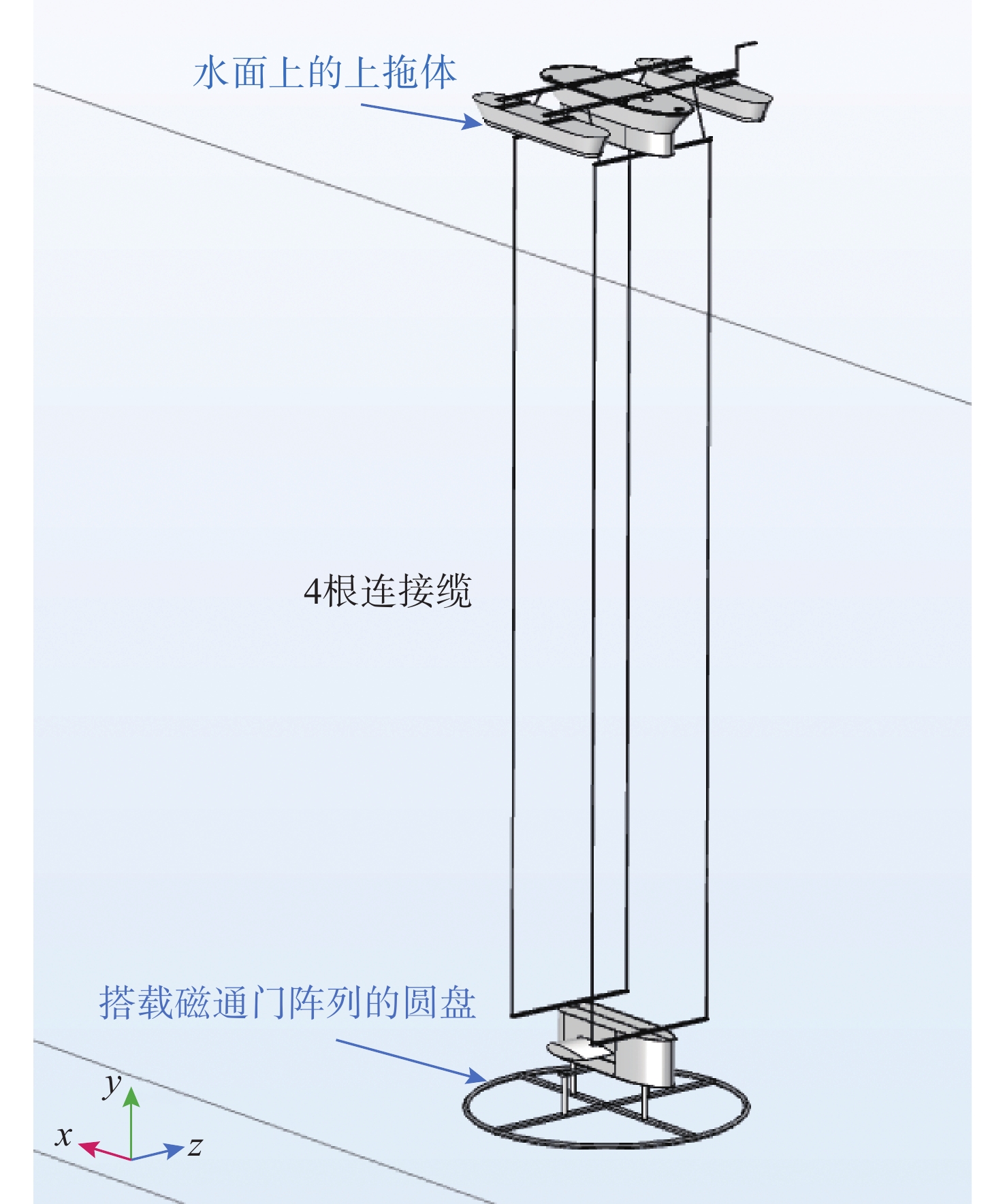
图 1 分体式水下拖曳平台系统整体结构示意图
Figure 1. Overall architecture of the split underwater towed platform system
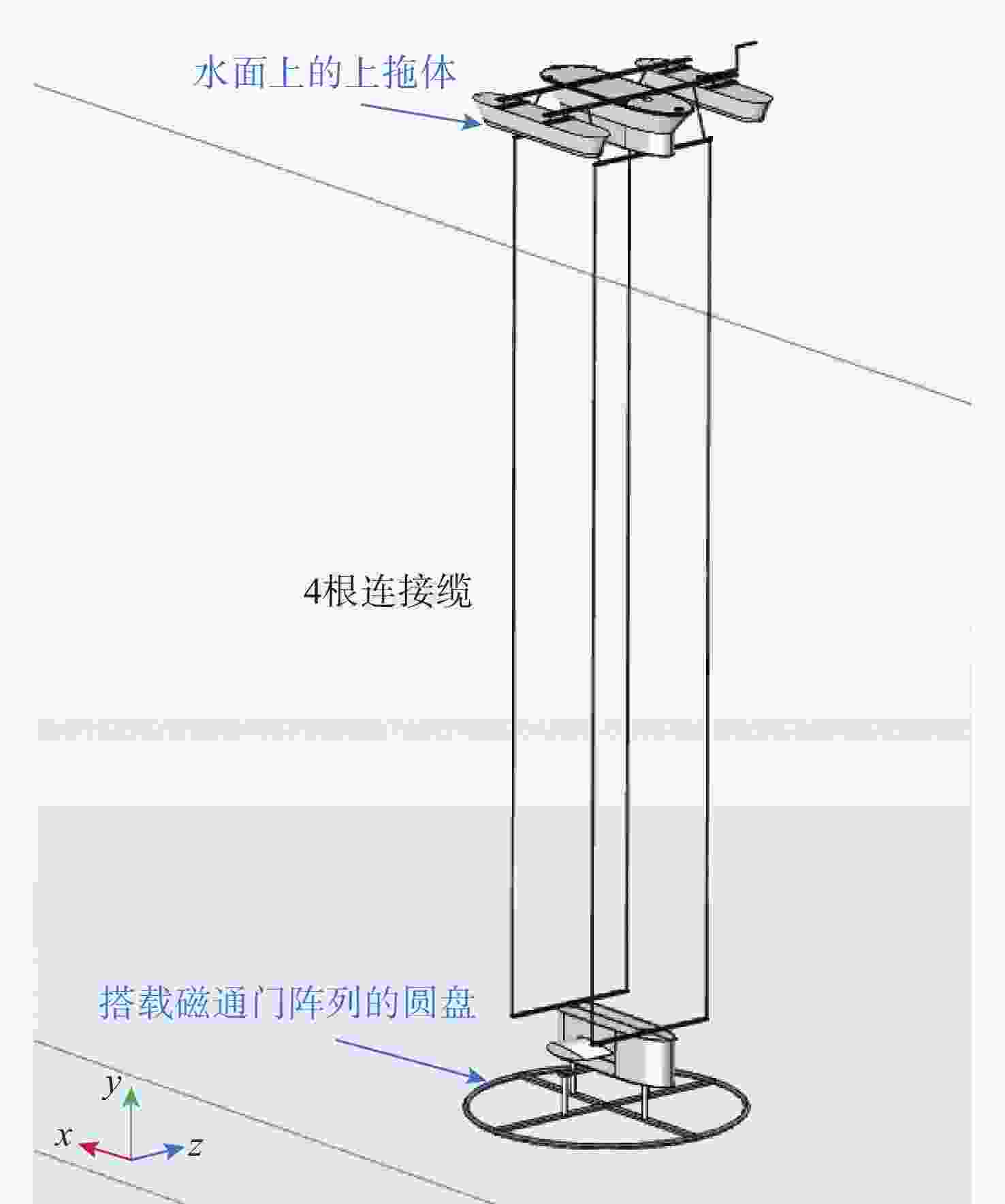
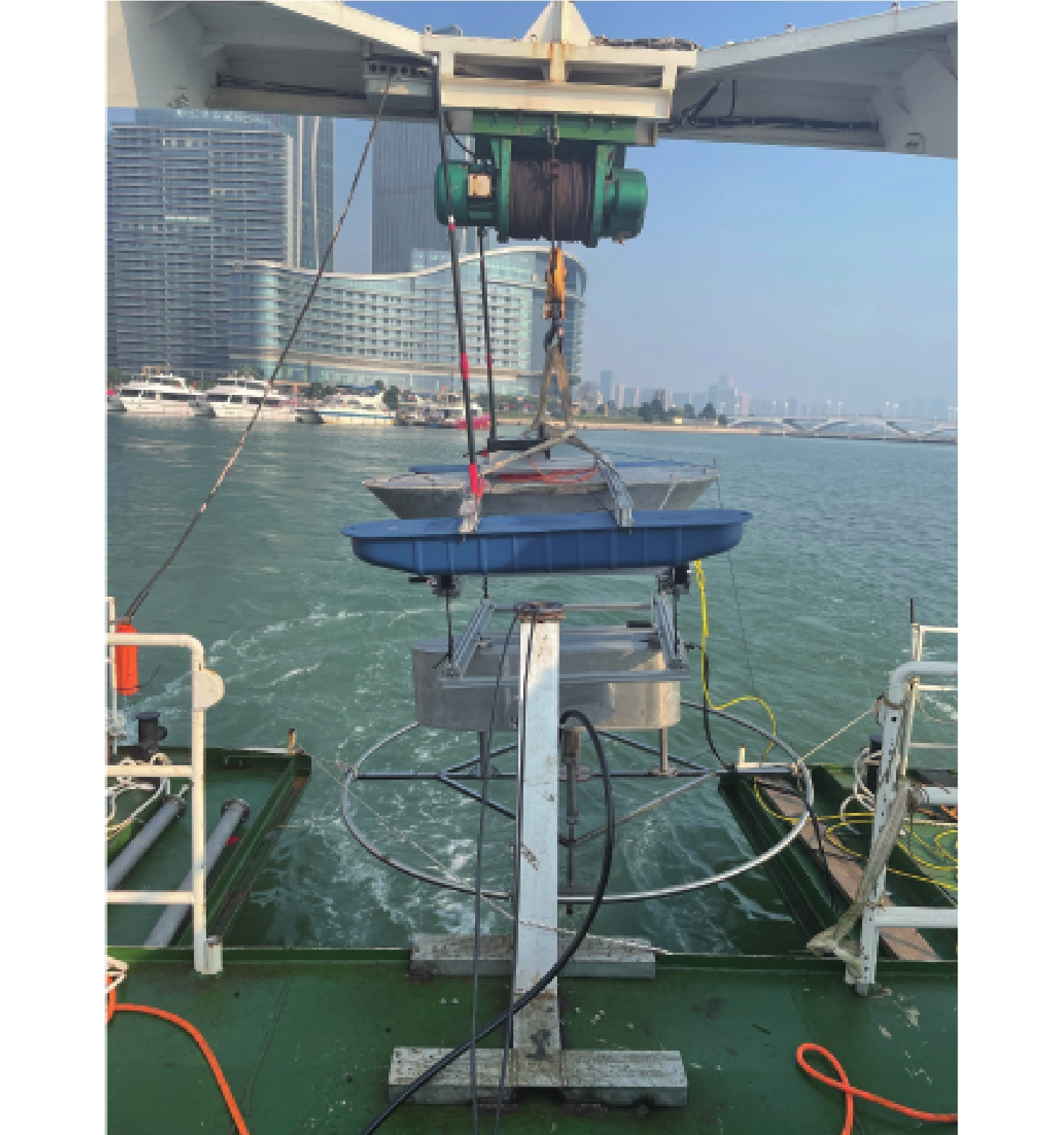
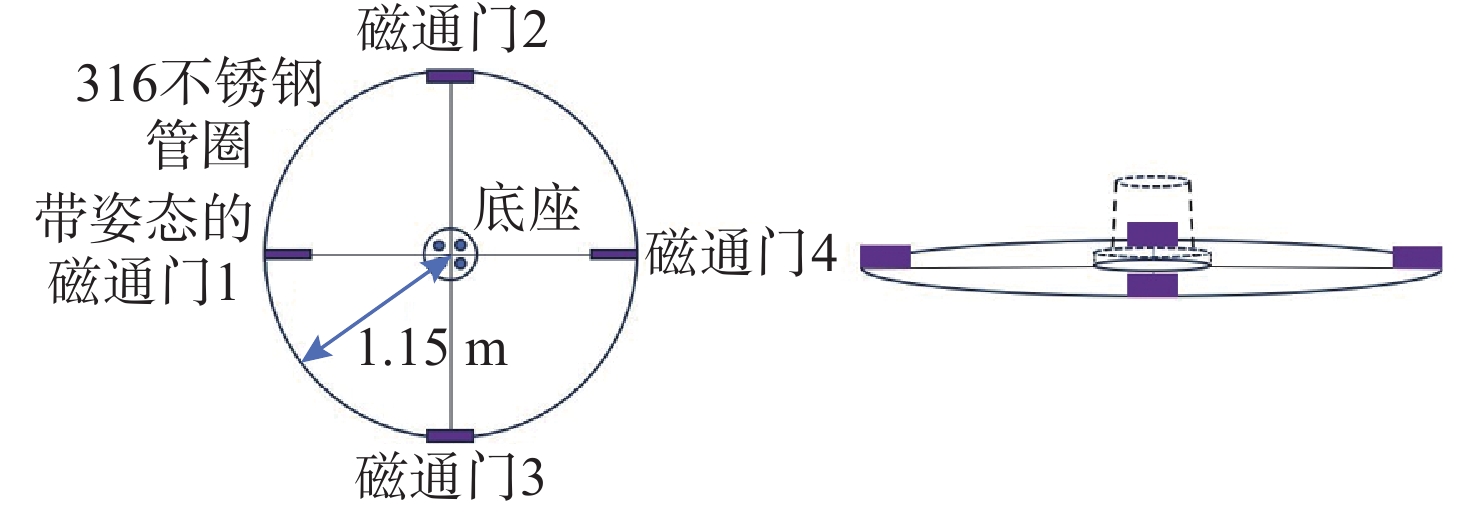
图 2 分体式水下拖曳平台机械结构示意图
Figure 2. Mechanical structure of the split underwater towed platform
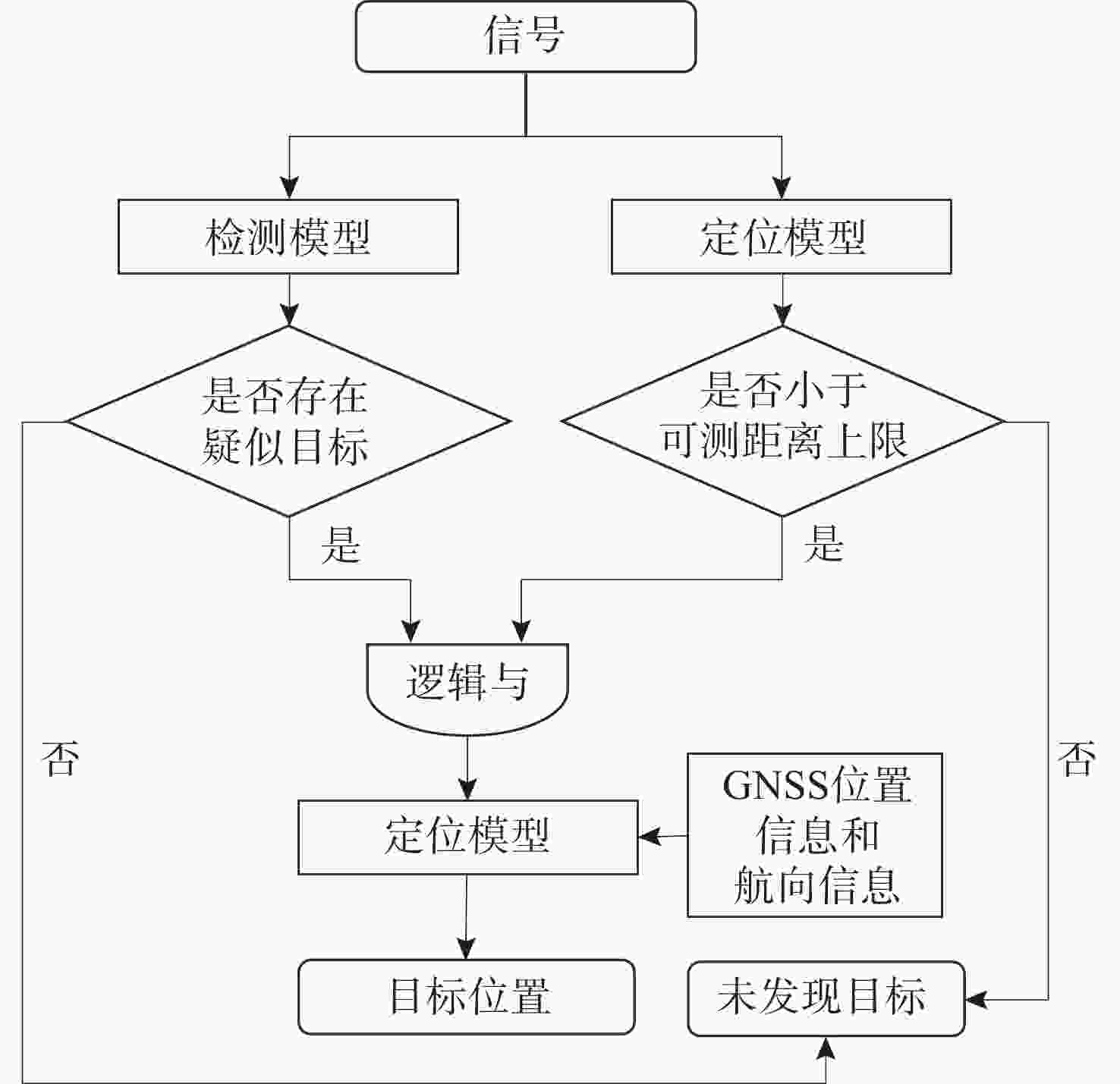
图 6 双模型协同磁源定位方法流程
Figure 6. Flow chart of dual-model collaborative magnetic source localization method
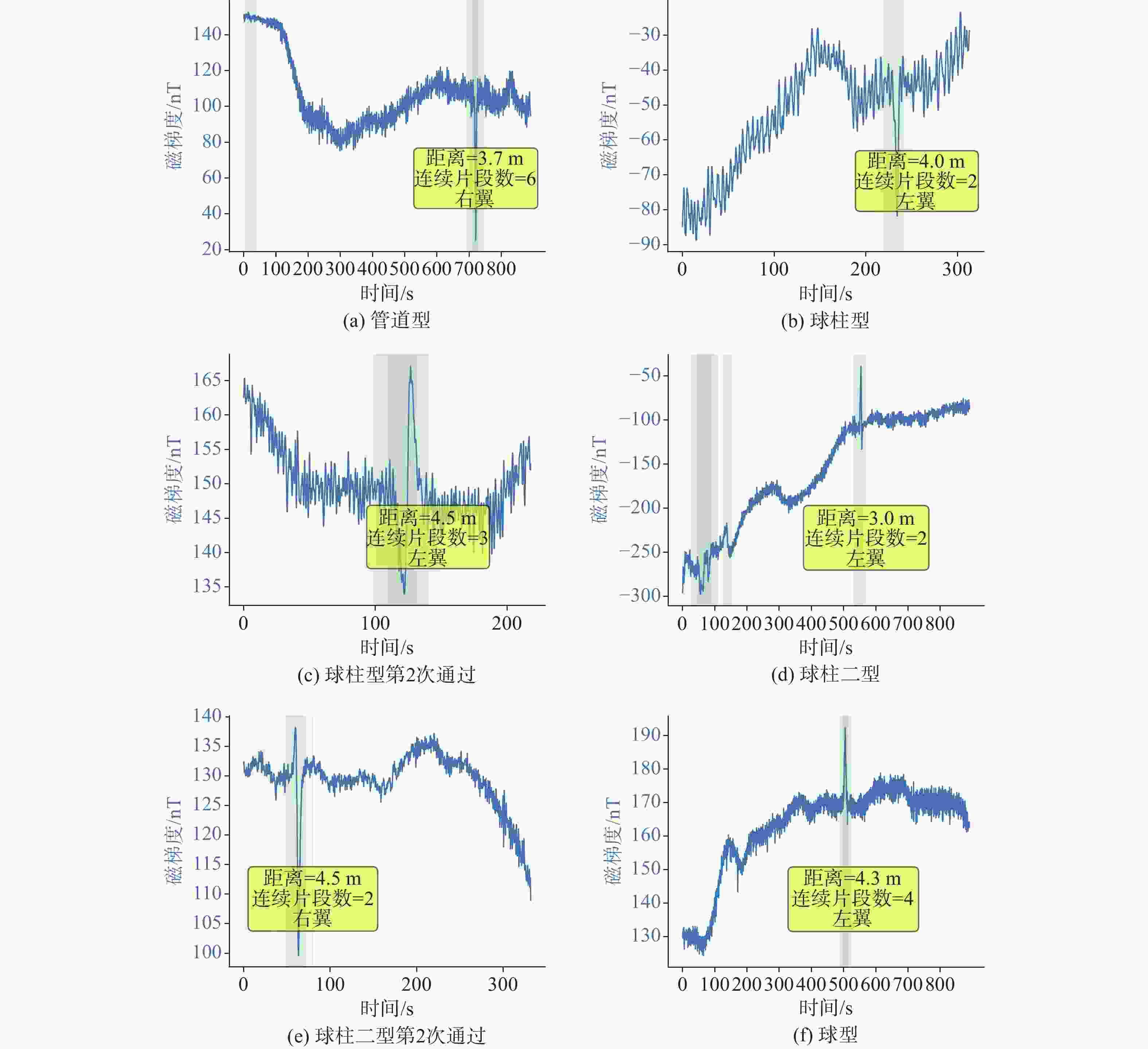
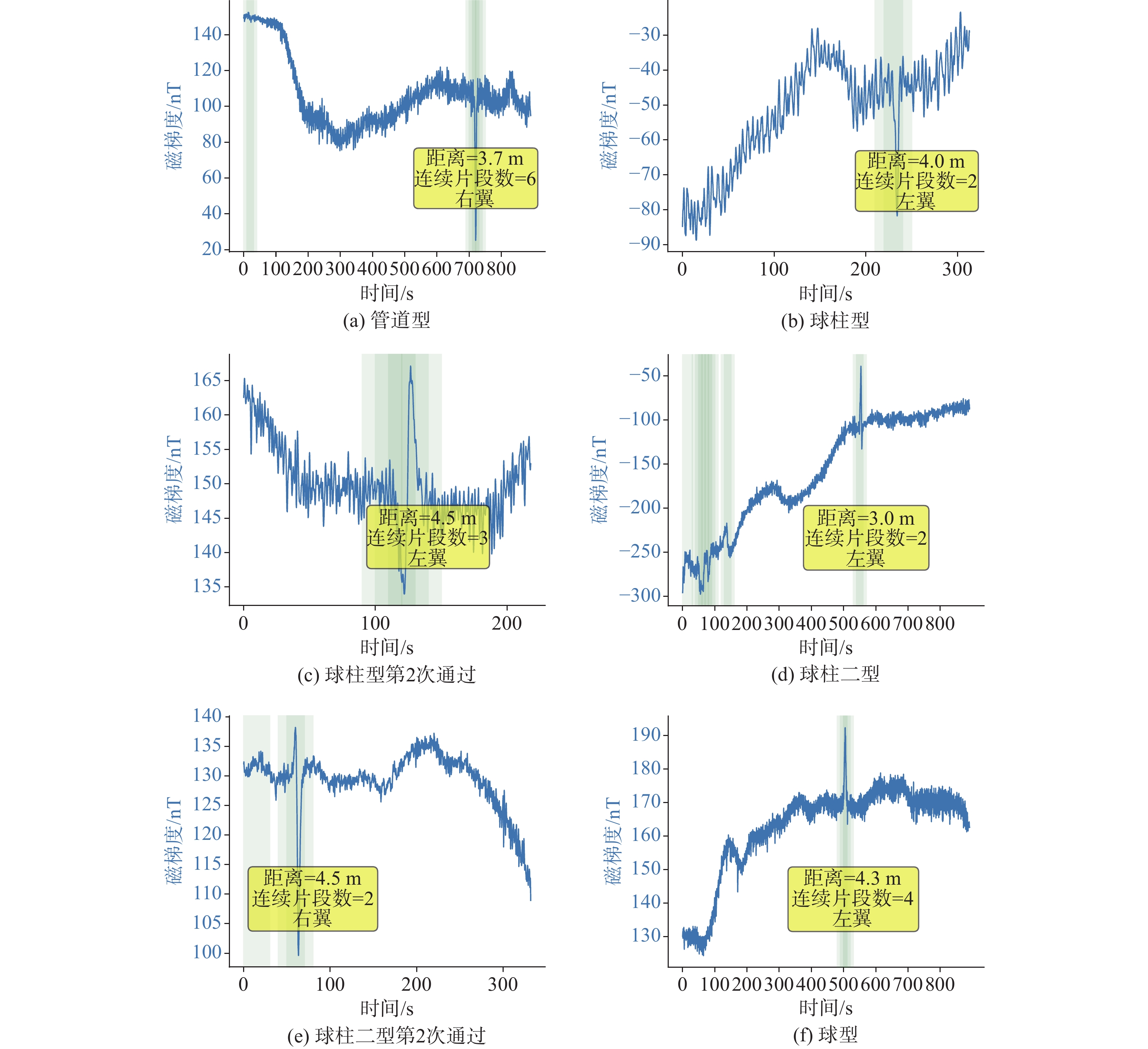
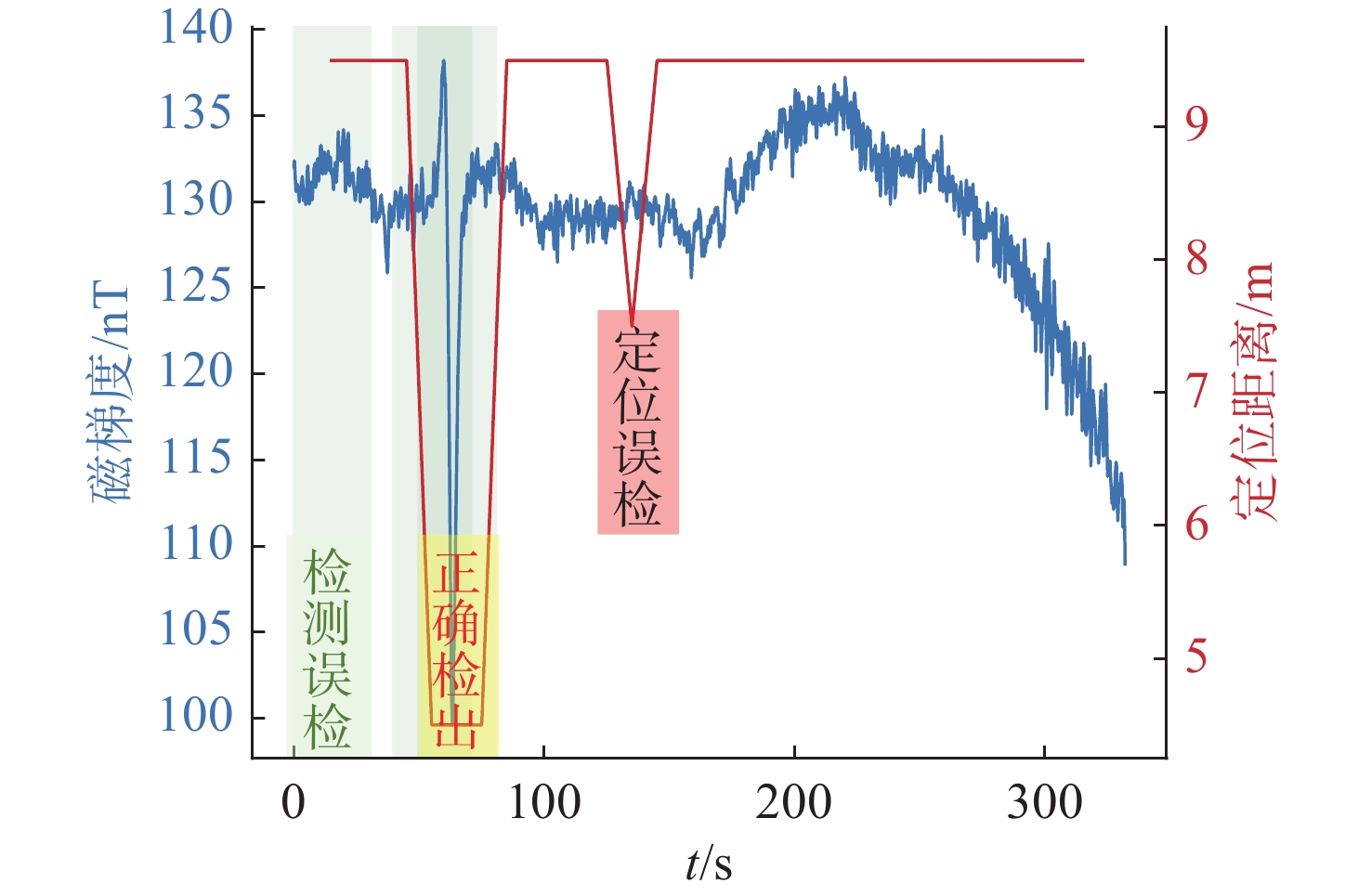
图 11 4类目标磁源通过特性曲线检测结果
Figure 11. Detection results of magnetic source passing characteristic curves for four types of targets
表 1 磁通门传感器参数
Table 1. Parameters of fluxgate magnetometer
序号 参数名称 参数设置 1 通道数 3 2 输入电压/V ±10 3 AD采样/bit 24 4 采样率/Hz 200 5 1 Hz处频域噪声 ≤0.3 μVRMS/√Hz 6 通信方式 内记 7 供电电压/V 24 8 功耗/W ≤3 9 尺寸 ≤270 mm×56 mm×56 mm  下载: 导出CSV
下载: 导出CSV
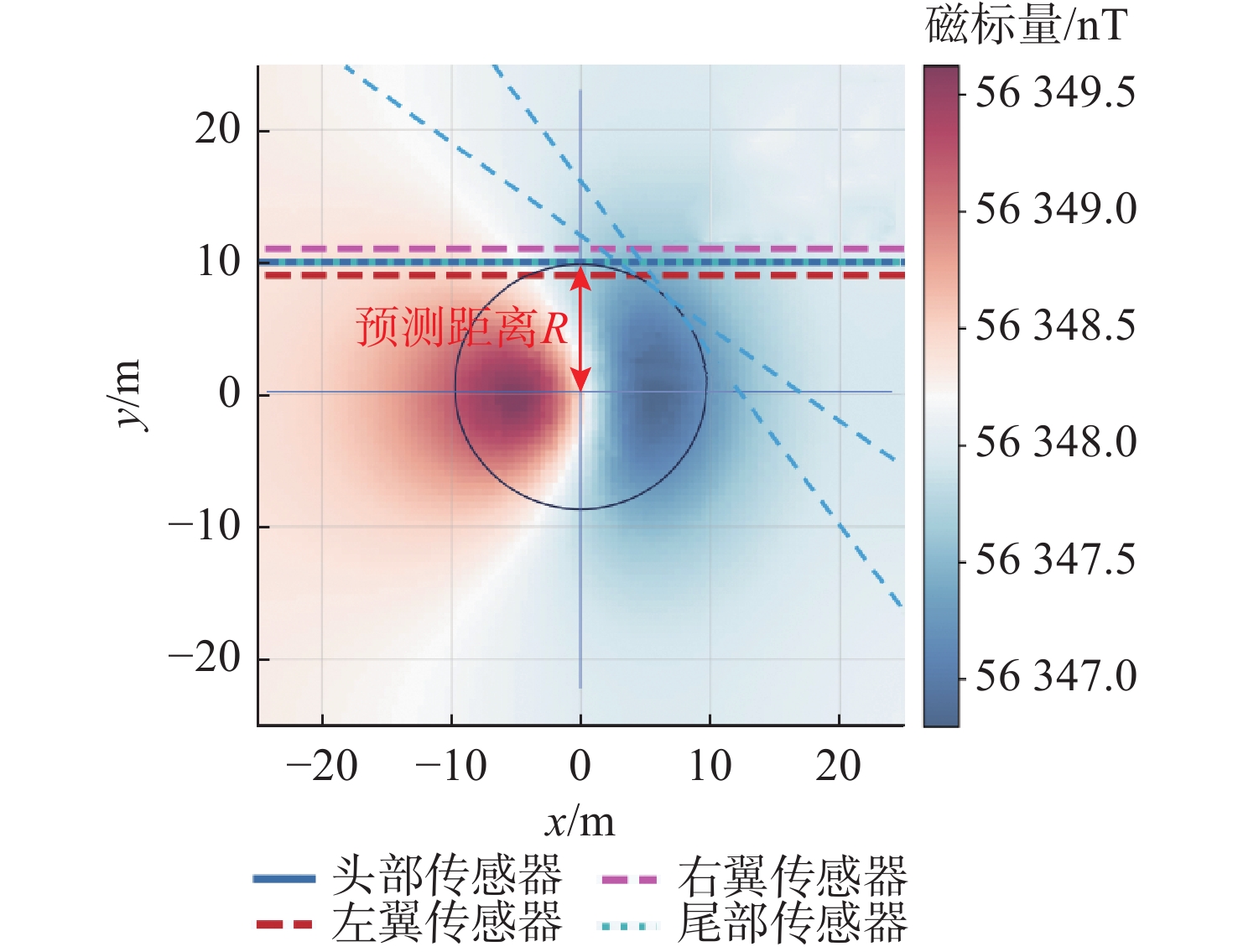
表 2 COMSOL磁异常仿真参数设置
Table 2. Parameter settings of COMSOL magnetic anomaly simulation
参数名称 参数设置 海水电导率/(S/m) 4 海水相对磁导率 1 海水相对介电常数 80 目标物(铁)电导率/(S/m) 1.12×107 目标物(铁)相对磁导率 200 目标物(铁)相对介电常数 1 地磁场总强度/nT 56348 地磁倾角设置/(°) 50 地磁偏角设置/(°) 2 稳态求解器 PARDISO 直接求解器 相对容差 1×10−5 物理场控制网格单元规模 常规
下载: 导出CSV
表 3 1D-CNN网络结构与主要参数
Table 3. Architecture and main parameters of 1D-CNN
层序号 层类型 核长 步长 填充 输出形状 1 Conv1d 7 2 3 [64, 32, 150] 2 BatchNorm1d [64, 32, 150] 3 ReLU [64, 32, 150] 4 MaxPool1d 2 2 0 [64, 32, 75] 5 Conv1d 5 1 2 [64, 64, 75] 6 BatchNorm1d [64, 64, 75] 7 ReLU [64, 64, 75] 8 MaxPool1d 2 2 0 [64, 64, 37] 9 Conv1d 3 1 1 [64, 64, 37] 10 BatchNorm1d [64, 64, 37] 11 ReLU [64, 64, 37] 12 AdaptiveAvgPool [64, 64, 1] 13 Sequential [64, 2] 14 Dropout [64, 64] 15 Linear [64, 2]
下载: 导出CSV
表 4 1D-ResNet网络结构与主要参数
Table 4. Architecture and main parameters of 1D-ResNet
层序号 层类型 核长 步长 填充 输出形状 1 Conv1d 5 2 2 [64, 8, 150] 2 BatchNorm1d [64, 8, 150] 3 ReLU [64, 8, 150] 4 MaxPool1d 3 2 1 [64, 8, 75] 5 BasicBlock1D_1 [64, 16, 38] 6 Conv1d 3 2 1 [64, 8, 38] 7 Conv1d 1 1 [64, 16, 38] 8 BatchNorm1d [64, 16, 38] 9 ReLU [64, 16, 38] 10 Conv1d 3 1 1 [64, 16, 38] 11 Conv1d 1 1 [64, 16, 38] 12 BatchNorm1d [64, 16, 38] 13 Sequential [64, 16, 38] 14 Conv1d 1 2 [64, 16, 38] 15 BatchNorm1d [64, 16, 38] 16 ReLU [64, 16, 38] 17 BasicBlock1D_2 [64, 32, 19] 18 BasicBlock1D_3 [64, 64, 10] 19 AdaptiveAvgPool1d [64, 64, 1] 20 Dropout [64, 64] 21 Linear [64, 2]
下载: 导出CSV
表 5 1D-ViT网络结构与主要参数
Table 5. Architecture and main parameters of 1D-ViT
层序号 层类型 输出形状 1 Conv1d_编码层 [64, 20, 10] 2 Dropout [64, 11, 20] 3 TransformerEncoderLayer_1 [64, 11, 20] 4 Multi-head Attention [64, 11, 20] 5 Dropout [64, 11, 20] 6 LayerNorm [64, 11, 20] 7 Linear [64, 11, 40] 8 Dropout [64, 11, 40] 9 Linear [64, 11, 20] 10 Dropout [64, 11, 20] 11 LayerNorm [64, 11, 20] 12 TransformerEncoderLayer_2 [64, 11, 20] 13 LayerNorm [64, 20] 14 Linear [64, 2]
下载: 导出CSV
表 6 海试数据集参数
Table 6. Parameters of the sea trial dataset
参数 数值 总时长/h 19.7 航速/kn 2~3 水深/m 10~20 海况平均波高/m 0.4~0.5 磁通门采样频率/Hz 200 姿态传感器采样频率/Hz 10
下载: 导出CSV
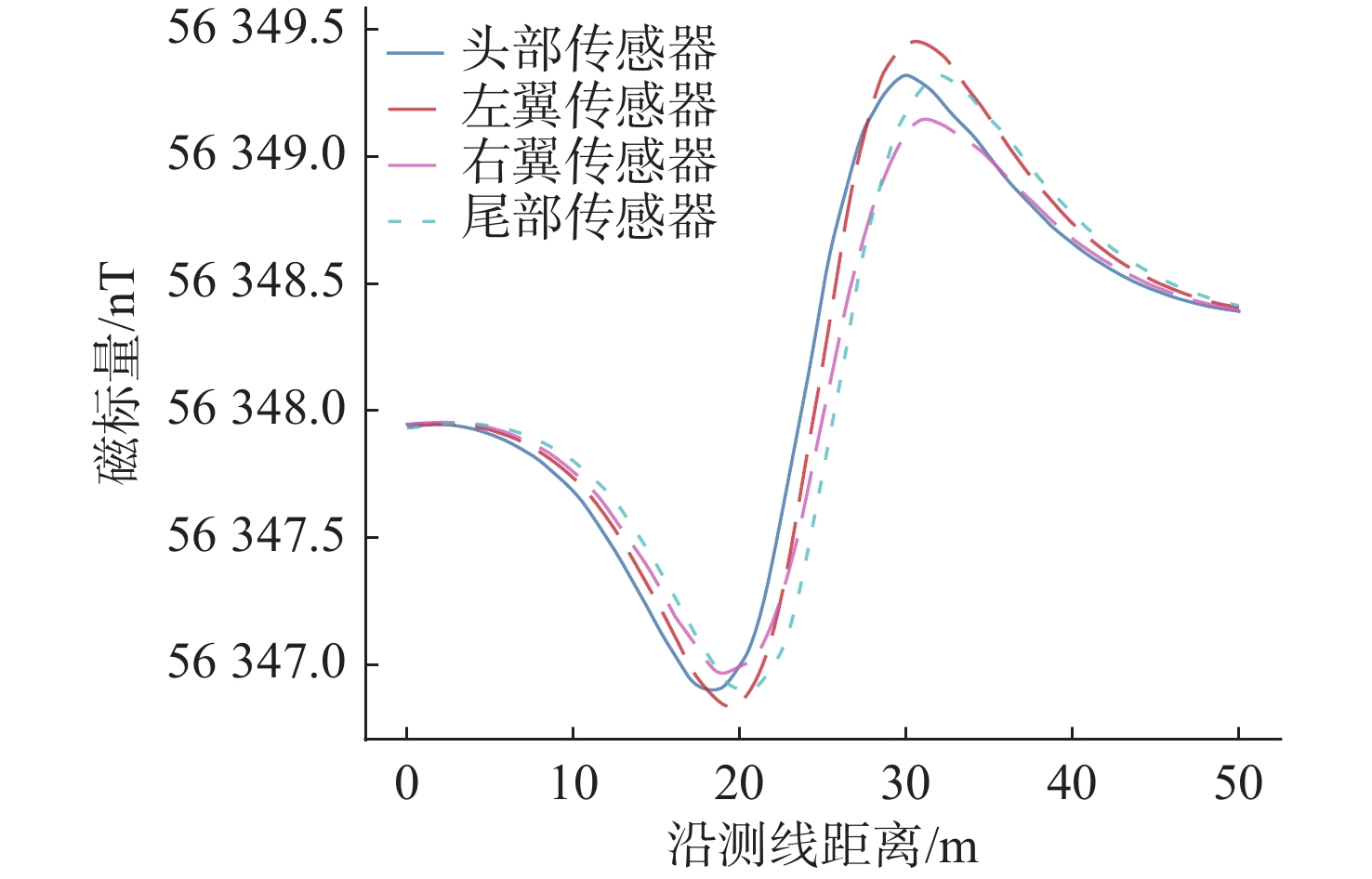
表 7 磁源通过特性仿真参数
Table 7. Simulation parameters of magnetic source passing characteristics
参数 数值 球型峰峰值均值/nT 16.30 球柱型峰峰值均值/nT 15.50 管道型峰峰值均值/nT 12.50 球柱二型峰峰值均值/nT 10.10 采样间距/m 0.12 滤波器(S-G)平滑度 1.00 随机缩放系数 0.10
下载: 导出CSV
表 8 模型验证损失
Table 8. Validation loss of models
任务 模型 信噪比/dB −1 1 3 5 7 检测 1D-CNN 0.434 0.386 0.332 0.283 0.239 1D-ResNet 0.433 0.385 0.318 0.301 0.247 1D-ViT 0.393 0.307 0.322 0.292 0.257 定位 1D-CNN 1.838 1.732 1.287 0.963 1.087 1D-ResNet 1.743 1.670 1.020 0.998 0.867 1D-ViT 1.758 1.832 1.311 1.212 1.099
下载: 导出CSV
表 9 模型验证准确率
Table 9. Validation accuracy of models
任务 模型 信噪比/dB −1 1 3 5 7 检测 1D-CNN 0.782 0.812 0.871 0.913 0.925 1D-ResNet 0.805 0.827 0.868 0.887 0.915 1D-ViT 0.842 0.889 0.907 0.904 0.921 定位 1D-CNN 0.381 0.352 0.502 0.695 0.632 1D-ResNet 0.386 0.408 0.428 0.653 0.705 1D-ViT 0.345 0.319 0.493 0.652 0.623
下载: 导出CSV
表 10 模型验证ROC-AUC值
Table 10. Validation ROC-AUC values of models
任务 模型 信噪比/dB −1 1 3 5 7 检测 1D-CNN 0.877 0.907 0.941 0.946 0.978 1D-ResNet 0.890 0.948 0.951 0.955 0.966 1D-ViT 0.931 0.952 0.962 0.978 0.974 定位 1D-CNN 0.734 0.752 0.830 0.901 0.867 1D-ResNet 0.748 0.764 0.845 0.893 0.908 1D-ViT 0.720 0.705 0.816 0.890 0.866
下载: 导出CSV
表 11 模型验证PR-AUC值
Table 11. Validation PR-AUC values of models
任务 模型 信噪比/dB −1 1 3 5 7 检测 1D-CNN 0.875 0.906 0.940 0.945 0.979 1D-ResNet 0.892 0.949 0.952 0.956 0.965 1D-ViT 0.932 0.952 0.962 0.978 0.975 定位 1D-CNN 0.394 0.466 0.596 0.775 0.726 1D-ResNet 0.438 0.502 0.627 0.785 0.797 1D-ViT 0.374 0.409 0.577 0.763 0.706
下载: 导出CSV
表 12 模型验证损失波动系数
Table 12. Variation coefficient of model validation loss
任务 模型 信噪比/dB −1 1 3 5 7 检测 1D-CNN 0.109 0.161 0.143 0.155 0.128 1D-ResNet 0.118 0.137 0.125 0.160 0.093 1D-ViT 0.039 0.025 0.036 0.040 0.023 定位 1D-CNN 0.015 0.081 0.062 0.029 0.032 1D-ResNet 0.033 0.028 0.030 0.036 0.030 1D-ViT 0.005 0.008 0.009 0.011 0.012
下载: 导出CSV
表 13 模型单帧推理时长
Table 13. Single-frame inference time of models
任务 模型 参数量 单帧推理时长/ms 检测 1D-CNN 23586 1.16±0.39 1D-ResNet 12154 2.83±0.41 1D-ViT 8382 2.28±1.08 定位 1D-CNN 23846 1.15±0.35 1D-ResNet 12414 2.82±0.37 1D-ViT 8466 2.12±0.33
下载: 导出CSV
表 14 模型定位误差估计
Table 14. Positioning error estimation of the model
目标物 陆地标定
距离/m模型定位
距离/m估计
误差/%管道型 4.5 3.7 17.8 球柱型 4.4 4.0 9.1 球柱型第2次通过 4.7 4.5 4.3 球柱二型 2.9 3.0 3.4 球柱二型第2次通过 4.4 4.5 2.3 球型 4.1 4.3 4.9
下载: 导出CSV
表 15 模型误检率
Table 15. False detection rate of the model
% 目标物 检测误
检率定位误
检率联合误
检率降幅
误检率管道型 25.0 80.0 0 25.0 球柱型 0 60.0 0 0 球柱型第2次通过 0 33.3 0 0 球柱二型 84.6 74.5 66.7 7.8 球柱二型第2次通过 33.3 33.3 0 33.3 球型 0 89.4 0 0
下载: 导出CSV
-
[1] Tian B, Wu Y, Hong H. A review of research on magnetic detection methods for underwater target[C]//2024 3rd International Conference on Artificial Intelligence and Computer Information Technology(AICIT), 2024: 1-6. [2] 李佳, 邱伟, 邹劭芬. 基于改进LM-GN算法的磁性目标定位方法研究[J]. 数字海洋与水下攻防, 2023, 6(5): 552-561. doi: 10.19838/j.issn.2096-5753.2023.05.004Li J, Qiu W, Zou S F. Research on magnetic target localization method based on improved LM-GN algorithm[J]. Digital Ocean & Underwater Warfare, 2023, 6(5): 552-561. doi: 10.19838/j.issn.2096-5753.2023.05.004 [3] 迟铖, 王丹, 于振涛, 等. 磁梯度张量不变量约束条件下的两点定位方法[J]. 水下无人系统学报, 2023, 31(4): 582-587.Chi C, Wang D, Yu Z T, et al. Two-point positioning method with magnetic gradient tensor invariant constraints[J]. Journal of Unmanned Undersea Systems, 2023, 31(4): 582-587. [4] Wang M J, Liang X F, Wang H D, et al. The magnetic array study of effective detection and location for submarine pipeline[C]//Proceedings of the Twenty-ninth(2019) International Ocean and Polar Engineering Conference. ISOPE, 2019: 1504. [5] Zeng F, Zhang X, Liu J, et al. Magnetic gradient tensor positioning method implemented on an autonomous underwater vehicle platform[J]. Journal of Marine Science and Engineering, 2023, 11(10): 1909. doi: 10.3390/jmse11101909 [6] Tang W, Huang G, Li G, et al. Eigenvector constraint-based method for eliminating dead zone in magnetic target localization[J]. Remote Sensing, 2023, 15(20): 4959. doi: 10.3390/rs15204959 [7] Liu G, Zhang Y, Liu W. Structural design and parameter optimization of magnetic gradient tensor measurement system[J]. Sensors, 2024, 24(13): 4083. doi: 10.3390/s24134083 [8] Wu X, Huang S, Li M, et al. Vector magnetic anomaly detection via an attention mechanism deep-learning model[J]. Applied Sciences, 2021, 11(23): 11533. doi: 10.3390/app112311533 [9] Hui R, Liang X, Zuo C, et al. 2D CNN-based multi-feature fusion detection method for the magnetic anomaly generated by submarine wake[J]. Journal of Ocean Engineering and Science, 2025, 10(6): 1139-1154. doi: 10.1016/j.joes.2023.11.001 [10] Wang S, Zhang X, Zhao Y, et al. Self-supervised marine noise learning with sparse autoencoder network for generative target magnetic anomaly detection[J]. Remote Sensing, 2024, 16(17): 3263. doi: 10.3390/rs16173263 [11] Zhang K, You X, Liu X, et al. Inversion of target magnetic moments based on scalar magnetic anomaly signals[J]. Electronics, 2023, 12(24): 4900. doi: 10.3390/electronics12244900 [12] Cheng S, Wang J, Wang J, et al. Application of polynomial chaos expansion in sensitivity analysis of towed cable parameters of the underwater towing system[J]. Journal of Ocean Engineering and Science, 2025, 10(4): 367-385. doi: 10.1016/j.joes.2023.09.001 [13] He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition(CVPR), 2016: 770-778. [14] Dosovitskiy A, Beyer L, Kolesnikov A, et al. An image is worth 16x16 words: Transformers for image recognition at scale[C]//International Conference on Learning Representations, 2021: 1-16. [15] Lecun Y, Bottou L, Bengio Y, et al. Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86(11): 2278-2324. doi: 10.1109/5.726791 [16] Savitzky A, Golay M J E. Smoothing and differentiation of data by simplified least squares procedures[J]. Analytical Chemistry, 1964, 36(8): 1627-1639. doi: 10.1021/ac60214a047 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 177
- HTML全文浏览量: 97
- PDF下载量: 91
- 被引次数: 0