Underwater Low-speed Small Targets Classification Using Highlights and Trajectory Features
-
摘要: 针对水下慢速小目标分类任务中, 传统统计学习方法仅依靠人工轨迹特征、特征表达单一、分类效果受限的问题, 文中提出融合距离维亮点特征与跟踪轨迹特征的联合分类方法。该方法从主动声呐回波中提取基于物理散射特性的距离维亮点特征, 补充目标静态属性信息; 同时提取轨迹特征以描述目标动态运动行为。实现动静特征互补, 解决单一特征信息不足的缺陷。在此基础上, 采用适用于小样本条件的统计学习方法构建分类器, 并通过蒙特卡洛实验验证方法稳定性。外场历史数据样本和场景化仿真联合验证结果表明, 所提轨迹-亮点联合特征分类方法的平均精确率从79.7%提升至85.4%, 平均召回率从84.4%提升至89.1%, 平均F1分数从81.6%提升至87.0%, 有效改善了传统方法因特征表达不充分而导致的水下慢速小目标分类性能不足的问题。Abstract: Traditional statistical learning methods rely only on manually designed trajectory features with single feature representation and limited classification performance in the classification task of underwater low-speed small targets. To address this issue, this paper proposed a joint classification method that integrated range-dimension highlight features and tracking trajectory features. The proposed method first extracted range-dimension highlight features based on physical scattering characteristics from active sonar echoes to supplement static attribute information of the target, while simultaneously extracting trajectory features to describe the dynamic motion behavior of the target. It realized the complementarity of static and dynamic features and solved the defect of insufficient information of a single feature. On this basis, a statistical learning method suitable for small-sample conditions was adopted to construct the classifier, and the stability of the method was verified through Monte Carlo experiments. The results of field historical data samples and scenario-based simulation joint verification show that compared with traditional classification methods, the proposed trajectory-highlight joint feature classification method improves the average precision from 79.7% to 85.4%, the average recall from 84.4% to 89.1%, and the average F1-score from 81.6% to 87.0%, effectively addressing the issue of insufficient classification performance for underwater low-speed small targets caused by the one-sided feature information in traditional methods and improving the classification capability for underwater low-speed small targets.
-
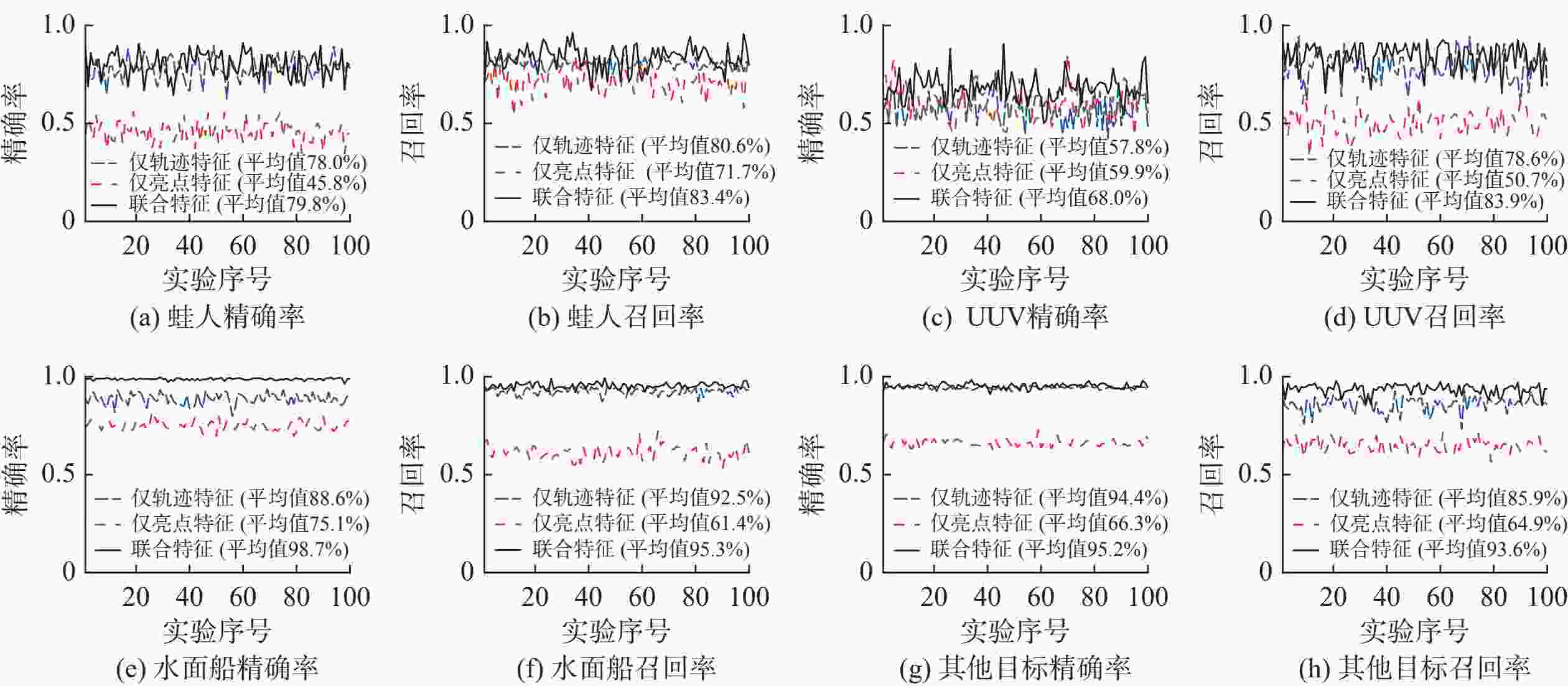
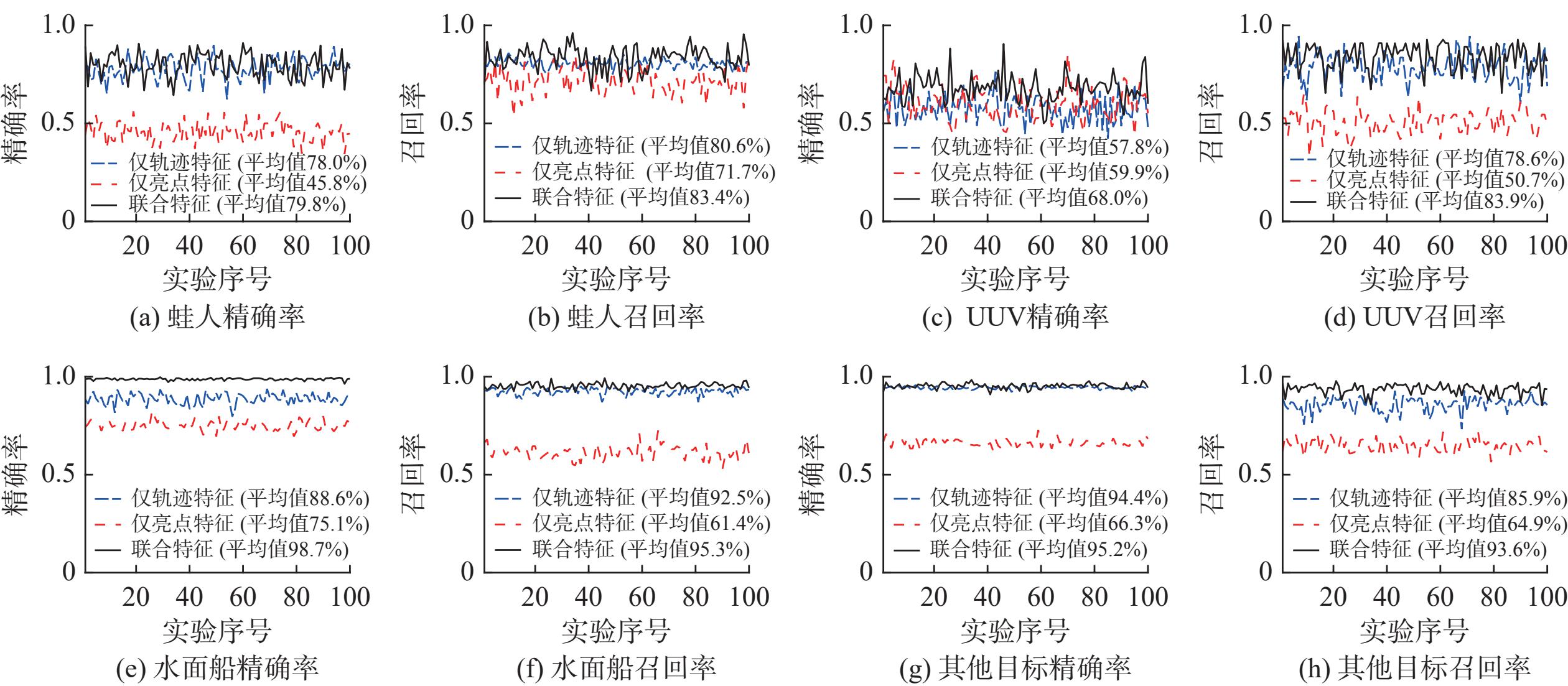
图 5 蒙特卡洛实验分类性能曲线
Figure 5. Classification performance curves of Monte Carlo experiments

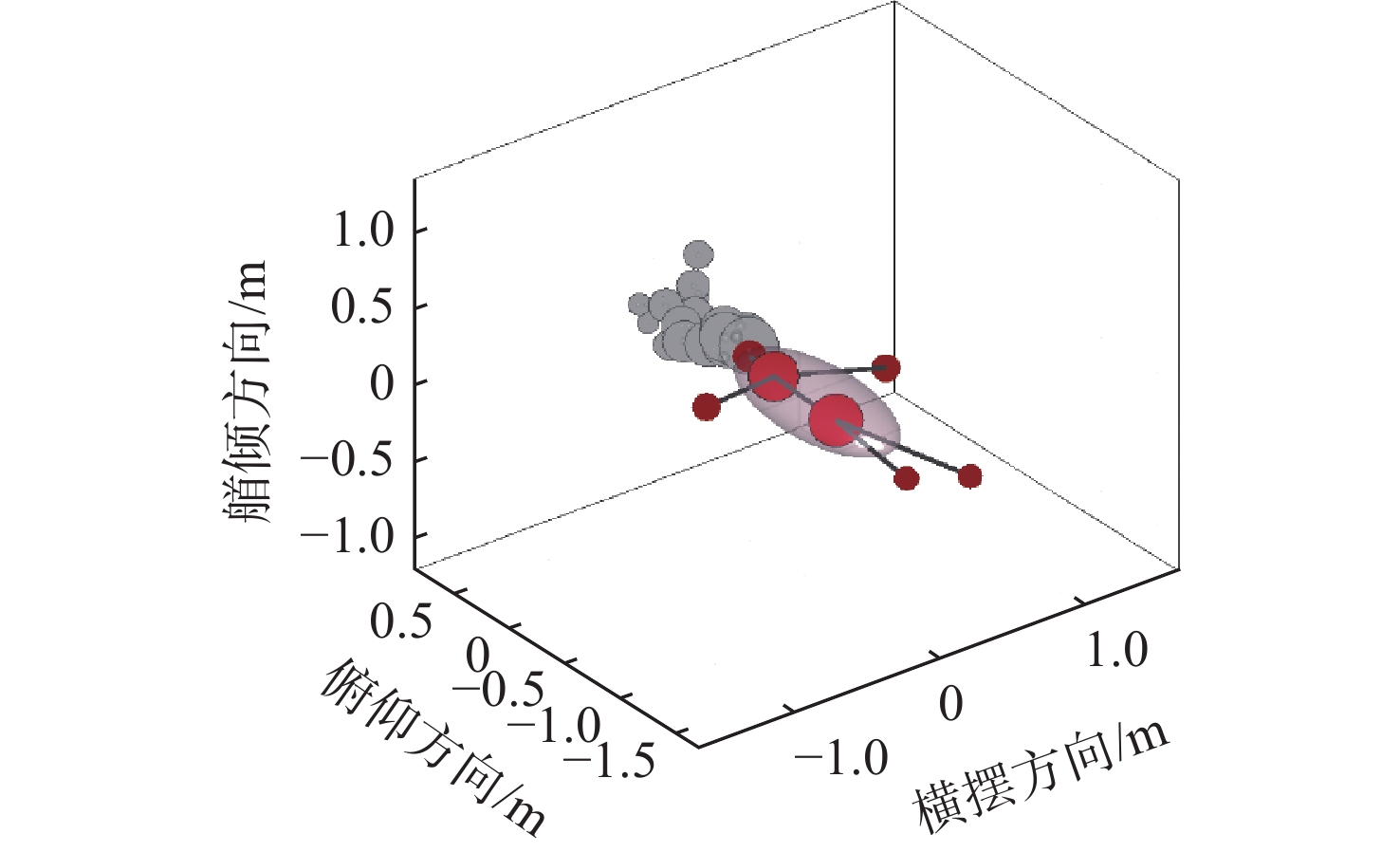
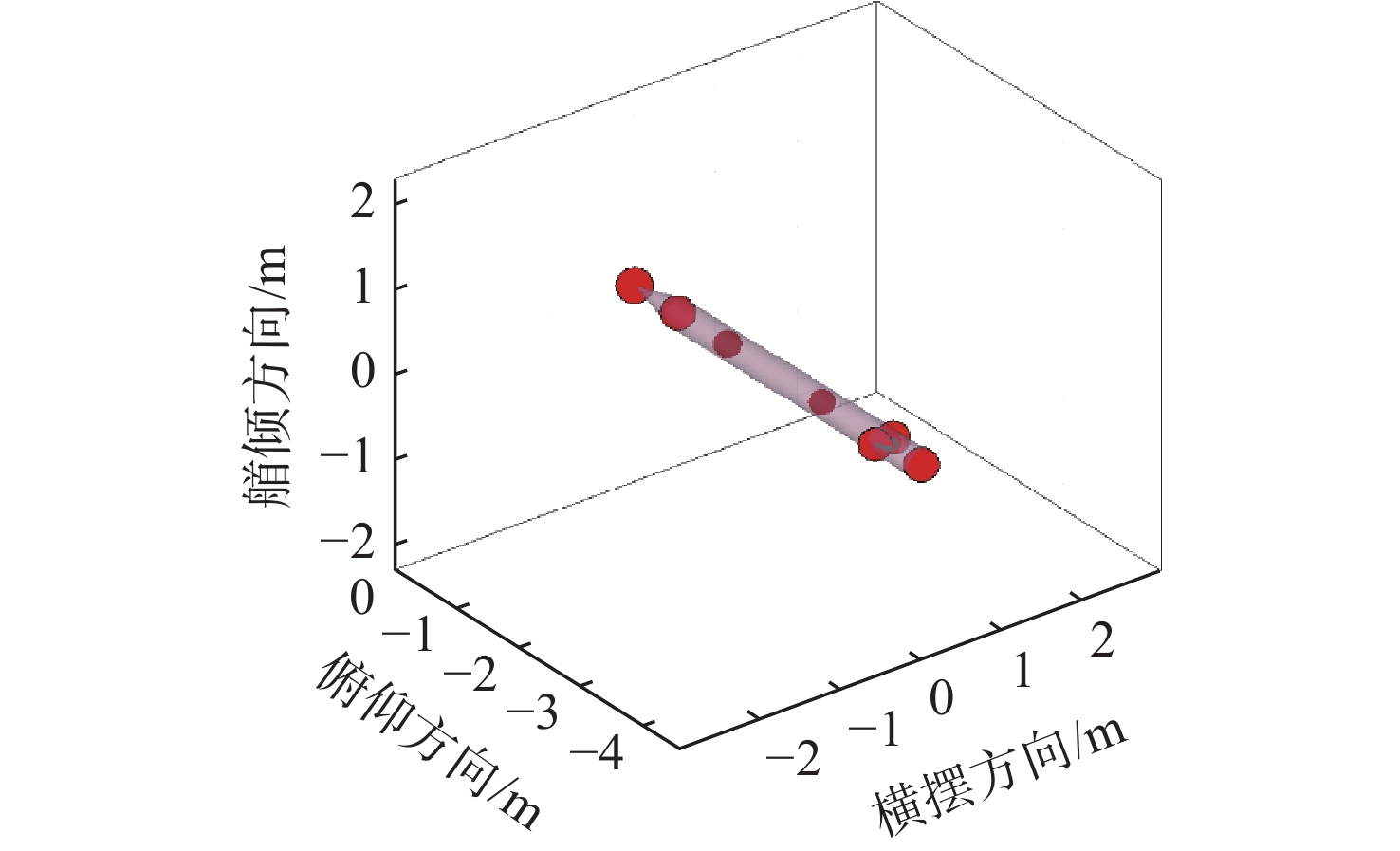
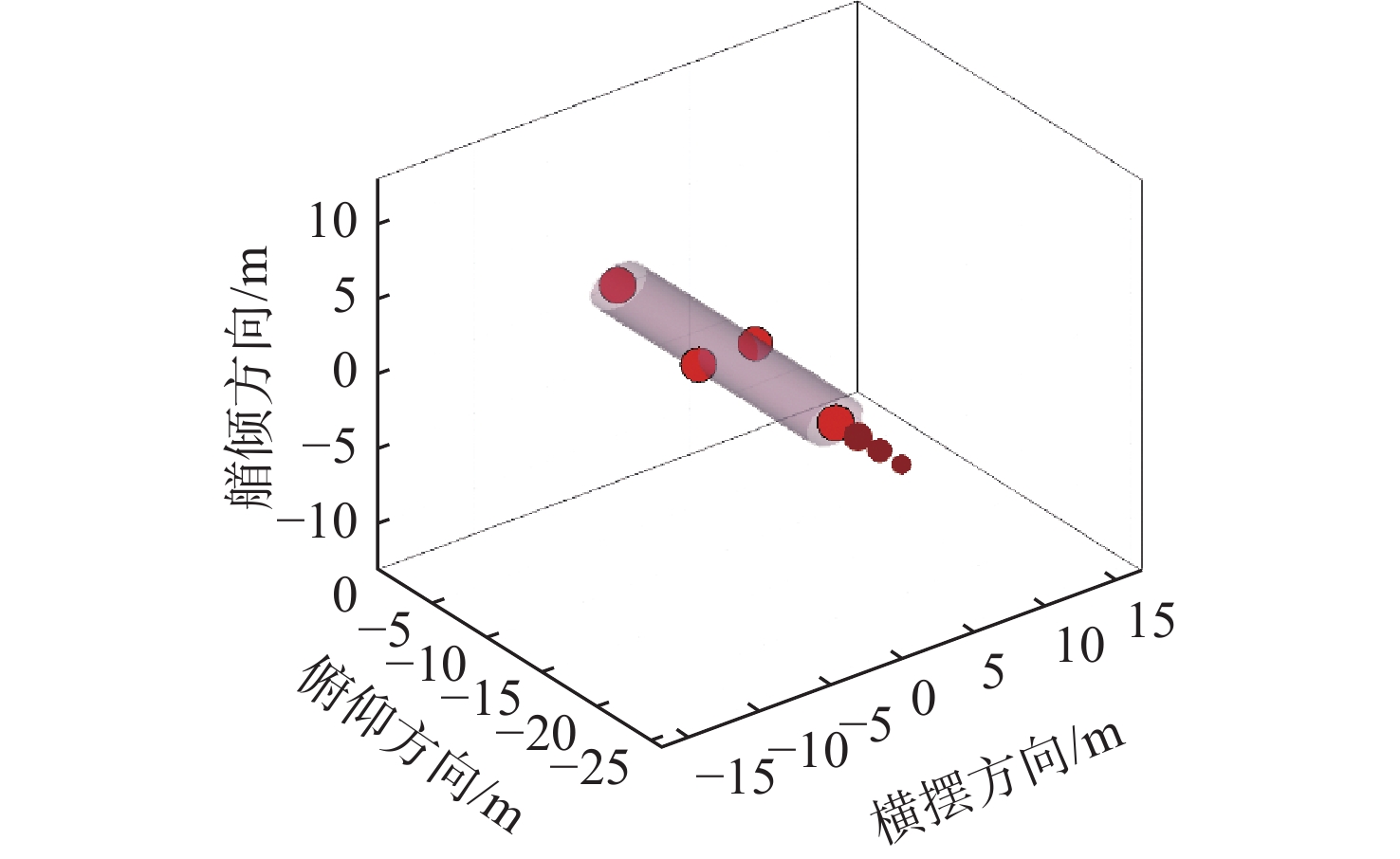
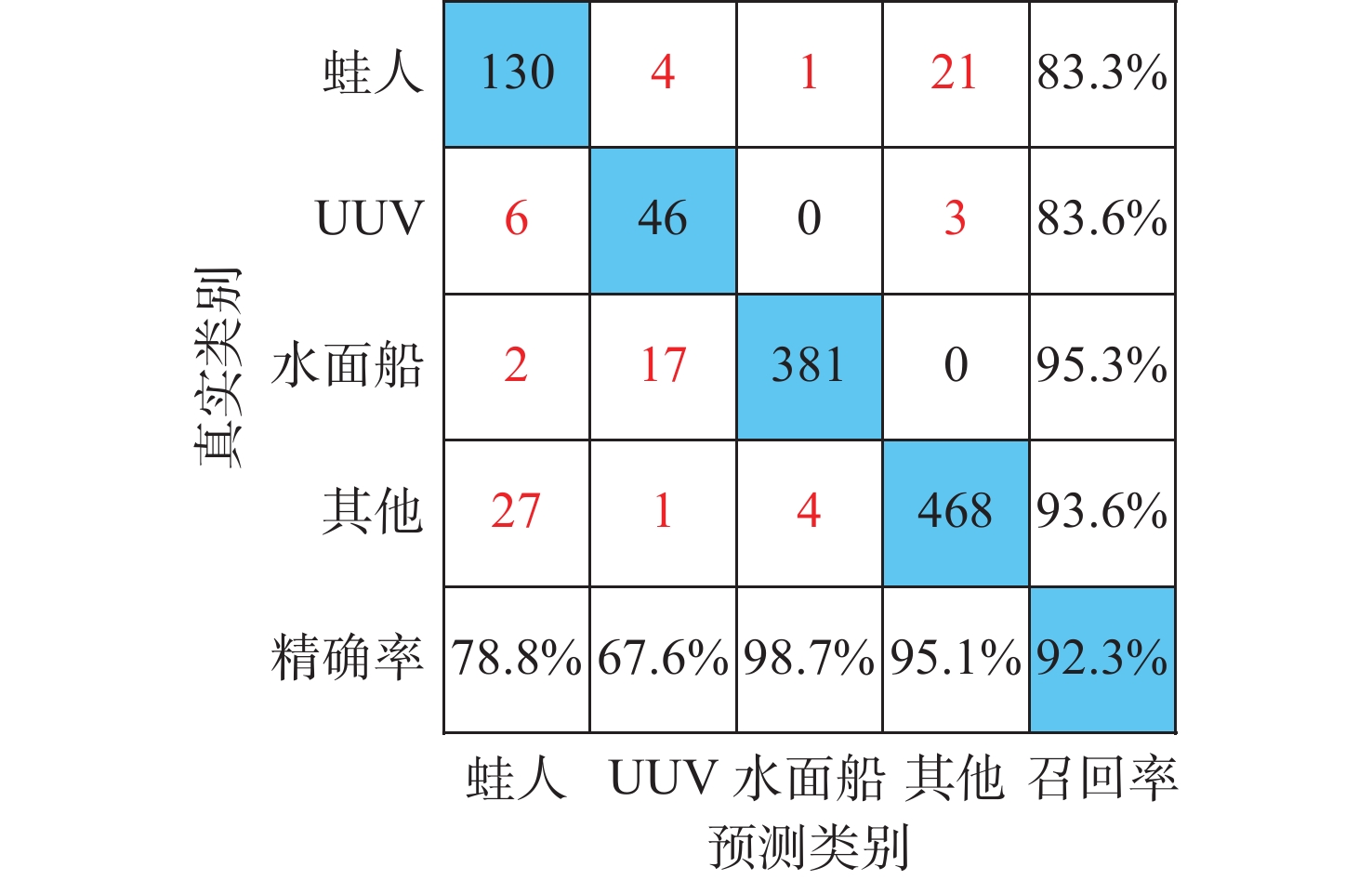
图 6 单次亮点-轨迹联合特征混淆矩阵
Figure 6. Confusion matrix of single-tracking joint characteristics
表 1 跟踪轨迹特征
Table 1. Characteristics of tracking trajectory
特征类别 特征参数 符号 描述 局部特征 速度 $ {v}_{i} $ 平均值、中位数、
最大值、最小值、
标准差偏移距离 $ {D}_{i} $ 方向变化率 $ {s}_{i} $ 全局特征 起止点间距离 L 轨迹点间距离之和 R 曲率 $ \rho $  下载: 导出CSV
下载: 导出CSV
表 2 距离维亮点特征
Table 2. Characteristics of distance highlight
特征类别 特征参数 符号 描述 全局特征 亮点数量 N 亮点时间展宽 T 局部特征 亮点间距特征 $ \Delta {t}_{i} $ 均值、标准差、
相关系数、偏度亮点强度分布特征 $ {S}_{i} $ 均值、标准差、峰值比、
强弱亮点比例
下载: 导出CSV
表 3 100次实验平均分类性能
Table 3. Average classification performance of 100 experiments
% 目标 性能 仅轨迹
特征仅亮点
特征轨迹-亮点
联合特征蛙人 精确率 78.0 45.8 79.8 召回率 80.6 71.7 83.4 F1分数 79.3 56.1 81.6 UUV 精确率 57.8 59.9 68.0 召回率 78.6 50.7 83.9 F1分数 66.6 54.9 75.1 水面船 精确率 88.6 75.1 98.7 召回率 92.5 61.4 95.3 F1分数 90.5 67.5 97.0 其他 精确率 94.4 66.3 95.2 召回率 85.9 64.9 93.6 F1分数 89.9 65.6 94.4 平均精确率 79.7 61.8 85.4 平均召回率 84.4 62.2 89.1 平均F1分数 81.6 61.0 87.0
下载: 导出CSV
-
[1] 孙玉臣, 王德石, 李宗吉, 等. 蛙人探测声呐系统发展综述[J]. 水下无人系统学报, 2021, 29(5): 509-523.Sun Y C, Wang D S, Li Z J, et al. Review of diver detection sonar system[J]. Journal of Unmanned Undersea Systems, 2021, 29(5): 509-523. [2] 杨益新, 周建波, 李明杨, 等. 水声学研究现状与发展趋势[J]. 声学技术, 2025, 44(3): 309-332. doi: 10.16300/j.cnki.1000-3630.25062401Yang Y X, Zhou J B, Li M Y, et al. Underwater acoustics: current status and future trends[J]. Technical Acoustics, 2025, 44(3): 309-332. doi: 10.16300/j.cnki.1000-3630.25062401 [3] 刘雄厚, 时荣伟, 杨益新. 利用跟踪轨迹特征和SVDD-SVM联合分类器的水下慢速小目标分类方法[J]. 声学学报, 2023, 48(4): 646-655. doi: 10.15949/j.cnki.0371-0025.2023.04.002Liu X H, Shi R W, Yang Y X. Underwater slowly-moving small target classification method using tracking trajectory features and SVDD-SVM classifier[J]. Acta Acustica, 2023, 48(4): 646-655. doi: 10.15949/j.cnki.0371-0025.2023.04.002 [4] 赖凯, 刘雄厚, 杨益新. 利用支持向量数据描述和递归特征消除的水下慢速小目标轨迹特征选择方法[J]. 声学学报, 2025, 50(2): 475-485.Lai K, Liu X H, Yang Y X. Underwater low-speed small target trajectory feature selection using support vector data description and recursive feature elimination[J]. Acta Acustica, 2025, 50(2): 475-485. [5] 关鑫, 李然威, 胡鹏, 等. 基于改进支持向量机的水声目标-杂波不平衡分类研究[J]. 应用声学, 2021, 40(5): 715-722.Guan X, Li R W, Hu P, et al. The imbalanced classification of underwater acoustic target-clutter based on improved support vector machine[J]. Journal of Applied Acoustics, 2021, 40(5): 715-722. [6] Christensen A J, Gupta A S, Kirsteins I P. Underwater small target classification using sparse multi-view discriminant analysis and the invariant scattering transform[J]. Journal of Marine Science and Engineering, 2024, 12(10): 1886. doi: 10.3390/jmse12101886 [7] 兰同宇, 刘本奇, 刘亮. 反UUV探测声呐系统发展综述[J]. 水下无人系统学报, 2022, 30(6): 704-713. doi: 10.11993/j.issn.2096-3920.2022-0033Lan T Y, Liu B Q, Liu L. Review on anti-UUV detection sonar system[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 704-713. doi: 10.11993/j.issn.2096-3920.2022-0033 [8] 朱进, 胡斌, 邵华. 基于多重运动特征的轨迹相似性度量模型[J]. 武汉大学学报(信息科学版), 2017, 42(12): 1703-1710. doi: 10.13203/j.whugis20150594Zhu J, Hu B, Shao H. Trajectory similarity measure based on multiple movement features[J]. Geomatics and Information Science of Wuhan University, 2017, 42(12): 1703-1710. doi: 10.13203/j.whugis20150594 [9] 汤渭霖. 声呐目标回波的亮点模型[J]. 声学学报, 1994(2): 92-100. doi: 10.3321/j.issn:0371-0025.2001.06.012Tang W L. Highlight model of echoes from sonar targets[J]. Acta Acustica, 1994(2): 92-100. doi: 10.3321/j.issn:0371-0025.2001.06.012 [10] 刘晓春, 杨云川, 胡友峰, 等. 基于水下运动目标亮点图像模型的数据增强[J]. 西北工业大学学报, 2024, 42(3): 417-425. doi: 10.1051/jnwpu/20244230417Liu X C, Yang Y C, Hu Y F, et al. Data augmentation based on highlight image models of underwater maneuvering target[J]. Journal of Northwestern Polytechnical University, 2024, 42(3): 417-425. doi: 10.1051/jnwpu/20244230417 [11] Zhang X Y, Pan H, Jing Z L, et al. UUVDNet: An efficient unmanned underwater vehicle target detection network for multibeam forward-looking sonar[J]. Ocean Engineering, 2025, 315: 119820. [12] 朱利超, 魏鹏举, 高杰, 等. 基于亮点模型的水下目标近程回波仿真研究[J]. 舰船电子工程, 2011, 31(11): 153-155. doi: 10.3969/j.issn.1627-9730.2011.11.045Zhu L C, Wei P J, Gao J, et al. Simulation of echoes from underwater scaling targets in short range based on highlight model[J]. Ship Electronic Engineering, 2011, 31(11): 153-155. doi: 10.3969/j.issn.1627-9730.2011.11.045 [13] 崔化超, 晏谢飞. 基于BELLHOP模型的水中目标回波亮点特征建模与分析[J]. 指挥信息系统与技术, 2019, 10(1): 80-84,100. [14] 李秀坤, 李婷婷, 夏峙. 水下目标特性特征提取及其融合[J]. 哈尔滨工程大学学报, 2010, 31(7): 903-908. doi: 10.3969/j.issn.1006-7043.2010.07.014Li X K, Li T T, Xia Z. Feature extraction and fusion based on the characteristics of underwater targets[J]. Journal of Harbin Engineering University, 2010, 31(7): 903-908. doi: 10.3969/j.issn.1006-7043.2010.07.014 [15] 张培珍, 林芳. 开式呼吸蛙人专用氧气瓶声散射特性[J]. 上海交通大学学报, 2022, 56(6): 764-771. doi: 10.16183/j.cnki.jsjtu.2021.078Zhang P Z, Lin F. Sound scattering characteristics of oxygen cylinder for open breathing diver[J]. Journal of Shanghai Jiao Tong University, 2022, 56(6): 764-771. doi: 10.16183/j.cnki.jsjtu.2021.078 [16] 薛文慧, 黄唯纯, 许聪, 等. 基于等效壳体反射系数的水下航行器声散射亮点模型研究[J]. 中国舰船研究, 2025, 20(5): 180-188. doi: 10.19693/j.issn.1673-3185.04505Xue W H, Huang W C, Xu C, et al. Study on the application of equivalent reflection coefficients in the acoustic scattering highlight model for underwater vehicles[J]. Chinese Journal of Ship Research, 2025, 20(5): 180-188. doi: 10.19693/j.issn.1673-3185.04505 [17] 黄金凤, 陈子铨, 汪海涛. 典型水面船回波亮点特征研究[J]. 舰船科学技术, 2025, 47(4): 124-129.Huang J F, Chen Z Q, Wang H T. Research on the echo highlight characteristics of typical surface ships[J]. Ship Science and Technology, 2025, 47(4): 124-129. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 160
- HTML全文浏览量: 72
- PDF下载量: 67
- 被引次数: 0