

Review on Optical Detection Technology for Underwater Small Targets
-
摘要: 微型水下航行器、小型水下探测器装置等水下小目标的精准探测与识别是海洋资源开发、水下安防预警及水下工程检测等领域的重要技术支撑。受水体衰减、光学散射、声波多径效应及复杂背景噪声等因素的综合制约, 传统探测技术在作用距离、空间分辨率与实时响应性等方面存在显著局限。随着海洋开发向精细化、智能化方向迈进, 以及水下无人装备对抗的战略价值持续凸显, 水下小目标光学探测技术已成为当前海洋信息技术领域的研究热点。文中系统梳理水下小目标光学探测技术的研究背景与战略意义, 重点从基于图像和基于激光雷达(LiDAR)两大技术路径展开全面综述: 在基于图像的技术体系中, 聚焦图像增强与目标检测两大核心环节, 深入剖析各类技术的原理机制、改进策略及性能表现; 在基于LiDAR的技术体系中, 针对面扫描、点扫描和线扫描成像3种探测模式, 系统阐述其技术特性与典型应用场景。最后剖析了现有技术面临的瓶颈, 并结合海洋技术发展趋势展望未来研究方向, 为水下小目标光学探测技术的工程化落地提供理论支撑。Abstract: The precise detection and identification of small underwater targets, such as micro underwater vehicles and small underwater detectors, constitute important technical support for fields including marine resource development, underwater security early warning, and underwater engineering inspection. Constrained by the combined effects of water body attenuation, optical scattering, acoustic multipath effect, and complex background noise, traditional detection technologies exhibit notable limitations in terms of effective detection range, spatial resolution, and real-time responsiveness. With the advancement of marine development toward refinement and intelligence, coupled with the increasingly prominent strategic value of underwater unmanned equipment countermeasures, optical detection technology for underwater small targets has emerged as a research hotspot in the domain of marine information technology. This paper systematically sorted out the research background and strategic significance of optical detection technology for underwater small targets and presented a comprehensive review focusing on two major technical approaches: image-based and LiDAR-based methods. For the image-based technical system, the paper centered on two core modules, namely image enhancement and target detection and conducted an in-depth analysis of the principle mechanism, improvement strategies, and performance characteristics of various technologies. For the LiDAR-based technical system, aiming at detection modes including area-scan imaging, point-scan imaging, and line-scan imaging, the paper systematically elaborated on their technical features and typical application scenarios. Furthermore, this paper analyzed the bottleneck problems faced by existing technologies and prospected future research directions in combination with the development trend of marine technology, so as to provide theoretical support for the engineering implementation of optical detection technology for underwater small targets.
-
Key words:
- underwater small target /
- optical detection /
- image enhancement /
- LiDAR
-
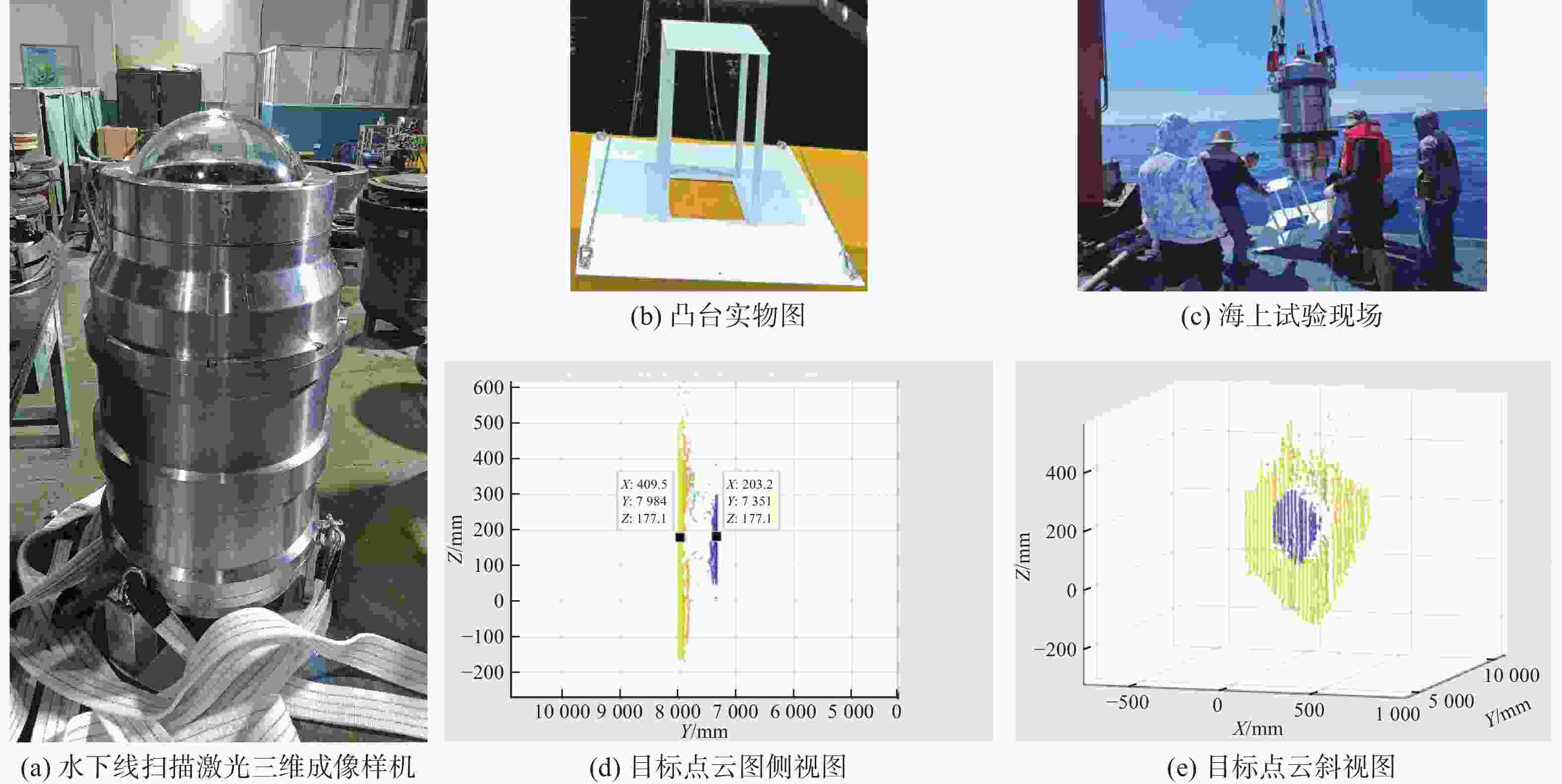
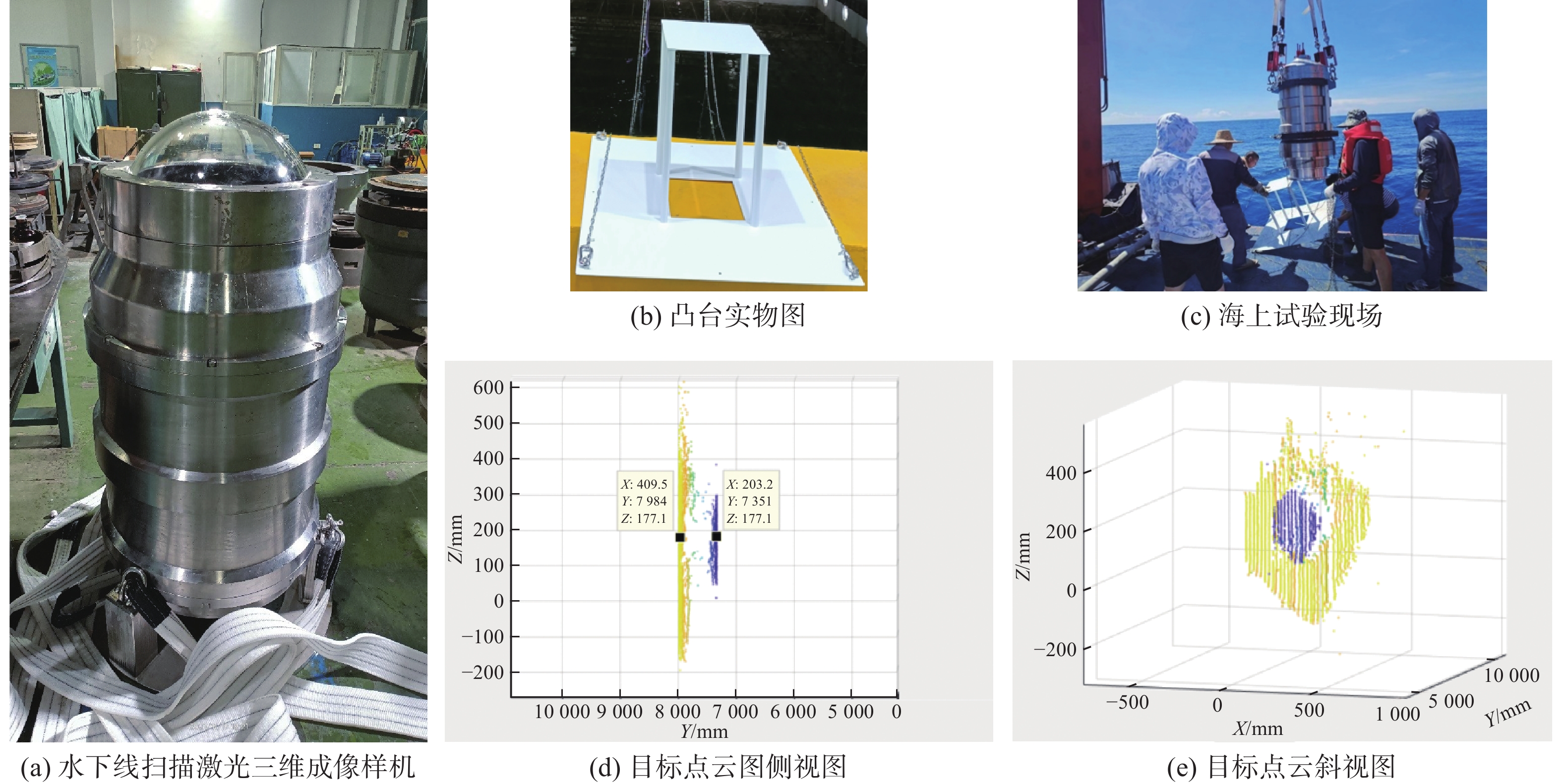
图 7 水下线扫描LiDAR样机及海试结果
Figure 7. Prototype of an underwater line-scanning LiDAR and sea trial results
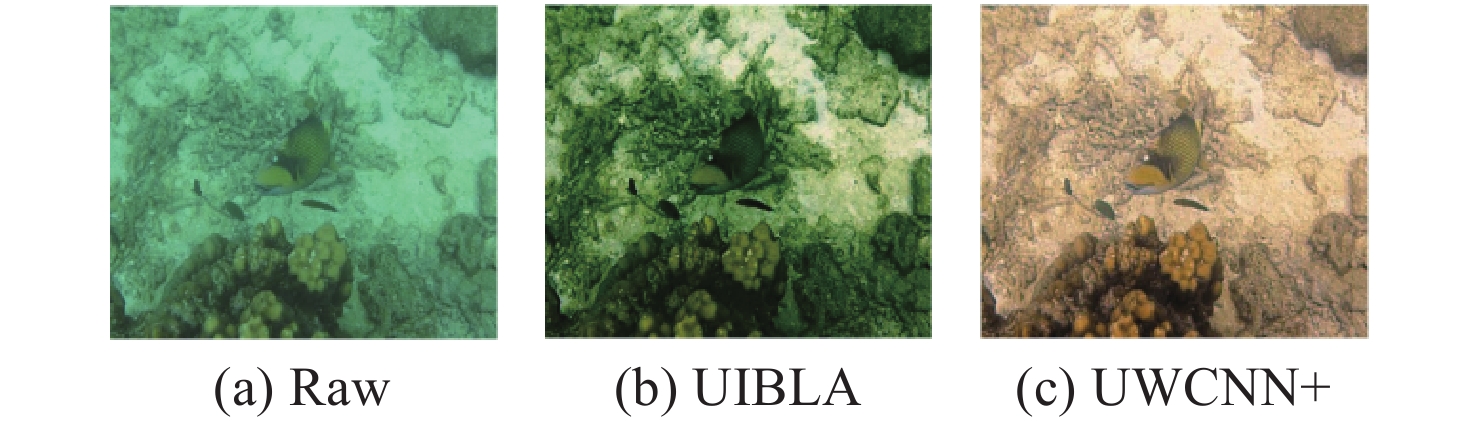
表 1 不同方法在测试集的定量评估
Table 1. Quantitative evaluation of different algorithms on UIEB test dataset
方法 MSE PSNR SSIM RED 2107.3 14.935 0.5965 UDCP 5131.0 11.029 0.5019 ODM 3208.6 16.085 0.5040 UIBLA 3012.6 15.079 0.6957 UWCNN 3887.7 18.79 0.7558  下载: 导出CSV
下载: 导出CSV
-
[1] Chen L, Huang Y, Dong J, et al. Underwater optical object detection in the era of artificial intelligence: Current, challenge, and future[J]. ACM Computing Surveys, 2025, 58(3): 1-34. doi: 10.1145/3759243 [2] Zhao L, Ren X, Fu L, et al. UWS-YOLO: Advancing underwater sonar object detection via transfer learning and orthogonal-snake convolution mechanisms[J]. Journal of Marine Science and Engineering, 2025, 13(10): 1847. doi: 10.3390/jmse13101847 [3] 吴亚军, 刘礼文. 一种基于深度学习水下高速航行器的目标识别方法研究[J]. 指挥控制与仿真, 2025, 47(2): 87-94.Wu Y J, Liu L W. Research on an underwater high-speed vehicle target recognition method based on deep learning[J]. Command Control & Simulation, 2025, 47(2): 87-94. [4] Sun Z, Tian T, Hu H, et al. Extreme-depth water-related optical imaging: Conquering ultra-low illumination environments from epipelagic zone to Mariana Trench[J]. Photoni X, 2026, 7(1): 7. doi: 10.1186/s43074-025-00212-4 [5] 孙哲, 李学龙. 涉水载波调制激光成像与信号处理方法综述[J]. 光学学报, 2026, 46(12): 50.Sun Z, Li X L. Review on waterborne carrier modulation laser imaging and signal processing methods[J]. Acta Optica Sinica, 2026, 46(12): 50. [6] 赵昊飞, 孙哲, 安泓郡, 等, 可学习频域滤波的水下载波调制激光雷达成像[J]. 光学学报, 2025, 45(19): 1911006.Zhao H F, Sun Z, An H J, et al. Underwater carrier modulation LiDAR imaging with learnable frequency-domain filtering[J]. Acta Optica Sinica, 2025, 45(19): 1911006. [7] Zhe S, Li X L. Water-related optical imaging: From algorithm to hardware[J]. Science China Technological Sciences, 2025, 68(1): 1100401. doi: 10.1007/s11431-023-2614-8 [8] Lim S H, Mat Isa N A, Ooi C H, et al. A new histogram equalization method for digital image enhancement and brightness preservation[J]. Signal, Image and Video Processing, 2015, 9(3): 675-689. doi: 10.1007/s11760-013-0500-z [9] Pizer S M, Amburn E P, Austin J D, et al. Adaptive histogram equalization and its variations[J]. Computer Vision, Graphics, and Image Processing, 1987, 39(3): 355-368. doi: 10.1016/S0734-189X(87)80186-X [10] Iqbal K, Odetayo M, James A, et al. Enhancing the low quality images using unsupervised colour correction method[C]//2010 IEEE International Conference on Systems, Man and Cybernetics, 2010: 1703-1709. [11] Zhou J C, Pang L, Zhang D H, et al. Underwater image enhancement method via multi-interval subhistogram perspective equalization[J]. IEEE Journal of Oceanic Engineering, 2023, 48(2): 474-488. doi: 10.1109/JOE.2022.3223733 [12] Fu X, Zhuang P, Huang Y, et al. A retinex-based enhancing approach for single underwater image[C]//2014 IEEE International Conference on Image Processing (ICIP), 2014: 4572-4576. [13] Petro A B, Sbert C, Morel J M. Multiscale retinex[J]. Image Processing on Line, 2014: 71-88. [14] He K, Sun J, Tang X. Single image haze removal using dark channel prior[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 33(12): 2341-2353. doi: 10.18535/ijecs/v5i1.12 [15] Chiang J Y, Chen Y C. Underwater image enhancement by wavelength compensation and dehazing[J]. IEEE Transactions on Image Processing, 2011, 21(4): 1756-1769. doi: 10.1109/tip.2011.2179666 [16] Drews P L J, Nascimento E R, Botelho S S C, et al. Underwater depth estimation and image restoration based on single images[J]. IEEE Computer Graphics and Applications, 2016, 36(2): 24-35. doi: 10.1109/MCG.2016.26 [17] Liu H, Chau L P. Underwater image restoration based on contrast enhancement[C]//2016 IEEE International Conference on Digital Signal Processing, 2016: 584-588. [18] Peng Y T, Cao K, Cosman P C. Generalization of the dark channel prior for single image restoration[J]. IEEE Transactions on Image Processing, 2018, 27(6): 2856-2868. doi: 10.1109/TIP.2018.2813092 [19] Carlevaris-Bianco N, Mohan A, Eustice R M. Initial results in underwater single image dehazing[C]//Oceans 2010 Mts/IEEE Seattle, 2010: 1-8. [20] Galdran A, Pardo D, Picón A, et al. Automatic red-channel underwater image restoration[J]. Journal of Visual Communication and Image Representation, 2015, 26: 132-145. doi: 10.1016/j.jvcir.2014.11.006 [21] Li C Y, Guo J C, Cong R M, et al. Underwater image enhancement by dehazing with minimum information loss and histogram distribution prior[J]. IEEE Transactions on Image Processing, 2016, 25(12): 5664-5677. doi: 10.1109/TIP.2016.2612882 [22] Peng Y T, Cosman P C. Underwater image restoration based on image blurriness and light absorption[J]. IEEE Transactions on Image Processing, 2017, 26(4): 1579-1594. doi: 10.1109/TIP.2017.2663846 [23] Akkaynak D, Treibitz T. Sea-thru: A method for removing water from underwater images[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 1682-1691. [24] Akkaynak D, Treibitz T. A revised underwater image formation model[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 6723-6732. [25] Anwar S, Li C. Diving deeper into underwater image enhancement: A survey[J]. Signal Processing: Image Communication, 2020, 89: 115978. doi: 10.1016/j.image.2020.115978 [26] Li J, Skinner K A, Eustice R M, et al. WaterGAN: Unsupervised generative network to enable real-time color correction of monocular underwater images[J]. IEEE Robotics and Automation letters, 2017, 3(1): 387-394. doi: 10.1109/lra.2017.2730363 [27] Li C, Anwar S, Porikli F. Underwater scene prior inspired deep underwater image and video enhancement[J]. Pattern Recognition, 2020, 98: 107038. doi: 10.1016/j.patcog.2019.107038 [28] Zhu J Y, Park T, Isola P, et al. Unpaired image-to-image translation using cycle-consistent adversarial networks[C]//Proceedings of the IEEE International Conference on Computer Vision, 2017: 2223-2232. [29] Li C, Guo J, Guo C. Emerging from water: Underwater image color correction based on weakly supervised color transfer[J]. IEEE Signal Processing Letters, 2018, 25(3): 323-327. doi: 10.1109/LSP.2018.2792050 [30] Oktay O, Schlemper J, Folgoc L L, et al. Attention u-net: Learning where to look for the pancreas[J]. arxiv preprint arxiv: 1804.03999, 2018. [31] Zhou Z, Siddiquee M M R, Tajbakhsh N, et al. UNet++: A nested U-Net architecture for medical image segmentation[C]//Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support: 4th DLMIA & 8th ML-CDS, MICCAI 2018, 2018:3-11. [32] Li C, Guo C, Ren W, et al. An underwater image enhancement benchmark dataset and beyond[J]. IEEE Transactions on Image Processing, 2019, 29: 4376-4389. doi: 10.1109/tip.2019.2955241 [33] Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2117-2125. [34] Quang T N, Lee S, Song B C. Object detection using improved bi-directional feature pyramid network[J]. Electronics, 2021, 10(6): 746. doi: 10.3390/electronics10060746 [35] Ren S, He K, Girshick R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 39(6): 1137-1149. doi: 10.1109/tpami.2016.2577031 [36] Hussain M. YOLO-v1 to YOLO-v8, the rise of YOLO and its complementary nature toward digital manufacturing and industrial defect detection[J]. Machines, 2023, 11(7): 677. doi: 10.3390/machines11070677 [37] Han L, Li N, Li J, et al. SA-FPN: Scale-aware attention-guided feature pyramid network for small object detection on surface defect detection of steel strips[J]. Measurement, 2025, 249: 117019. doi: 10.1016/j.measurement.2025.117019 [38] Zhao S, Zheng J, Sun S, et al. An improved YOLO algorithm for fast and accurate underwater object detection[J]. Symmetry, 2022, 14(8): 1669. doi: 10.3390/sym14081669 [39] Pan T S, Huang H C, Lee J C, et al. Multi-scale ResNet for real-time underwater object detection[J]. Signal, Image and Video Processing, 2021, 15(5): 941-949. doi: 10.1007/s11760-020-01818-w [40] Li X, Yu H, Chen H. Multi-scale aggregation feature pyramid with cornerness for underwater object detection[J]. The Visual Computer, 2024, 40(2): 1299-1310. doi: 10.1007/s00371-023-02849-3 [41] Chen Y, An H, Sun Z, et al. Large model enhanced computational ghost imaging[J]. Science China Technological Sciences, 2025, 68(11): 2120403. doi: 10.1007/s11431-025-3062-3 [42] Yang C, Zhang C, Jiang L, et al. Underwater image object detection based on multi-scale feature fusion[J]. Machine Vision and Applications, 2024, 35(6): 124. doi: 10.1007/s00138-024-01606-3 [43] Cao J, Bao W, Shang H, et al. GCL-YOLO: A GhostConv-based lightweight yolo network for UAV small object detection[J]. Remote Sensing, 2023, 15(20): 4932. doi: 10.3390/rs15204932 [44] Wei C, Wang W. RFAG-YOLO: A receptive field attention-guided YOLO network for small-object detection in UAV images[J]. Sensors, 2025, 25(7): 2193. doi: 10.3390/s25072193 [45] Wang G, Chen Y, An P, et al. UAV-YOLOv8: A small-object-detection model based on improved YOLOv8 for UAV aerial photography scenarios[J]. Sensors, 2023, 23(16): 7190. doi: 10.3390/s23167190 [46] He L, Zhou Y, Liu L, et al. Research on object detection and recognition in remote sensing images based on YOLOv11[J]. Scientific Reports, 2025, 15(1): 14032. doi: 10.1038/s41598-025-96314-x [47] Wang J, Zhao H. Improved YOLOv8 algorithm for water surface object detection[J]. Sensors, 2024, 24(15): 5059. doi: 10.3390/s24155059 [48] Cai S, Zhou X, Cai W, et al. Lightweight underwater object detection method based on multi-scale edge information selection[J]. Scientific Reports, 2025, 15(1): 27681. doi: 10.1038/s41598-025-13566-3 [49] Liu F, Fei Y, Su M, et al. A novel lightweight model for underwater small object detection[C]//2024 China Automation Congress (CAC), 2024: 2226-2231. [50] Xu F, Ding X, Peng J, et al. Real-time detecting method of marine small object with underwater robot vision[C]//2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), 2018: 1-4. [51] Ge W, Sun J, Xu Y, et al. Real-time object detection algorithm for underwater robots[C]//2021 China Automation Congress (CAC), 2021: 7703-7707. [52] Li M, Pang H, Jiang C. SGL-YOLO: Lightweight underwater object detection algorithm based on feature fusion: M. Li et al[J]. Signal, Image and Video Processing, 2025, 19(16): 1372. doi: 10.1007/s11760-025-04962-3 [53] Yu C, Yu Y, Wang Z, et al. The current state of development in underwater lidar detection[C]//Sixth Conference on Frontiers in Optical Imaging and Technology: Novel Technologies in Optical Systems, 024: 299-319. [54] Wang M, Zhang K, Wei H, et al. Underwater image quality optimization: Researches, challenges, and future trends[J]. Image and Vision Computing, 2024, 146: 104995. doi: 10.1016/j.imavis.2024.104995 [55] Acharekar M A. Underwater laser imaging system (ULIS)[C]//Detection and Remediation Technologies for Mines and Minelike Targets II, 1997: 750-761. [56] Forand J L, Fournier G R, Bonnier D, et al. LUCIE: A laser underwater camera image enhancer[C]//Proceedings of OCEANS ’93, 1993: 187-190. [57] Andersson A. Range gated viewing with underwater camera[M]. Linköping: Nstitutionen för Systemteknik, 2005. [58] Dalgleish F, Ouyang B, Vuorenkoski A. A unified framework for image performance enhancement of extended range laser seabed survey sensors[C]//2013 IEEE International Underwater Technology Symposium(UT), 2013: 1-7. [59] Imaki M, Ochimizu H, Tsuji H, et al. Underwater three-dimensional imaging laser sensor with 120-deg wide-scanning angle using the combination of a dome lens and coaxial optics[J]. Optical Engineering, 2016, 56(3): 031212. doi: 10.1117/1.oe.56.3.031212 [60] Kraken Robotics. Insight Pro Underwater 3D Laser Scanner[EB/OL]. (2025-11-02)[2026-06-23]. https://www.krakenrobotics.com/services/lidar-solutions/. [61] 广西本科教育网. 桂林理工大学周国清教授团队研发的轻小型水深探测激光雷达 (GQ-23) 成功发布 [EB/OL]. (2025-10-31)[2026-06-23]. https://zj.glut.edu.cn/info/1012/2674.htm. [62] Castillón M, Forest J, Ridao P. Underwater 3D scanner to counteract refraction: Calibration and experimental results[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 4974-4982. doi: 10.1109/TMECH.2022.3170504 [63] Leite P N, Pereira P N, Dionísio J M M, et al. Hybrid underwater imaging for the tri-dimensional inspection of critical structural elements in offshore platforms[J]. Ocean Engineering, 2024, 314: 119658. doi: 10.1016/j.oceaneng.2024.119658 [64] Li X, An H, Zhao H, et al. Streaknet-arch: an anti-scattering network-based architecture for underwater carrier lidar-radar imaging[J]. IEEE Transactions on Image Processing, 2025, 34: 4357-4370. doi: 10.1109/TIP.2025.3586431 [65] Li S, Gao X, Wang H, et al. Monocular underwater measurement of structured light by scanning with vibrating mirrors[J]. Optics and Lasers in Engineering, 2023, 169: 107738. doi: 10.1016/j.optlaseng.2023.107738 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 320
- HTML全文浏览量: 132
- PDF下载量: 76
- 被引次数: 0

图(8) / 表(4)




