Dynamic Evaluation Method for Underwater Small Target Detection Effectiveness
-
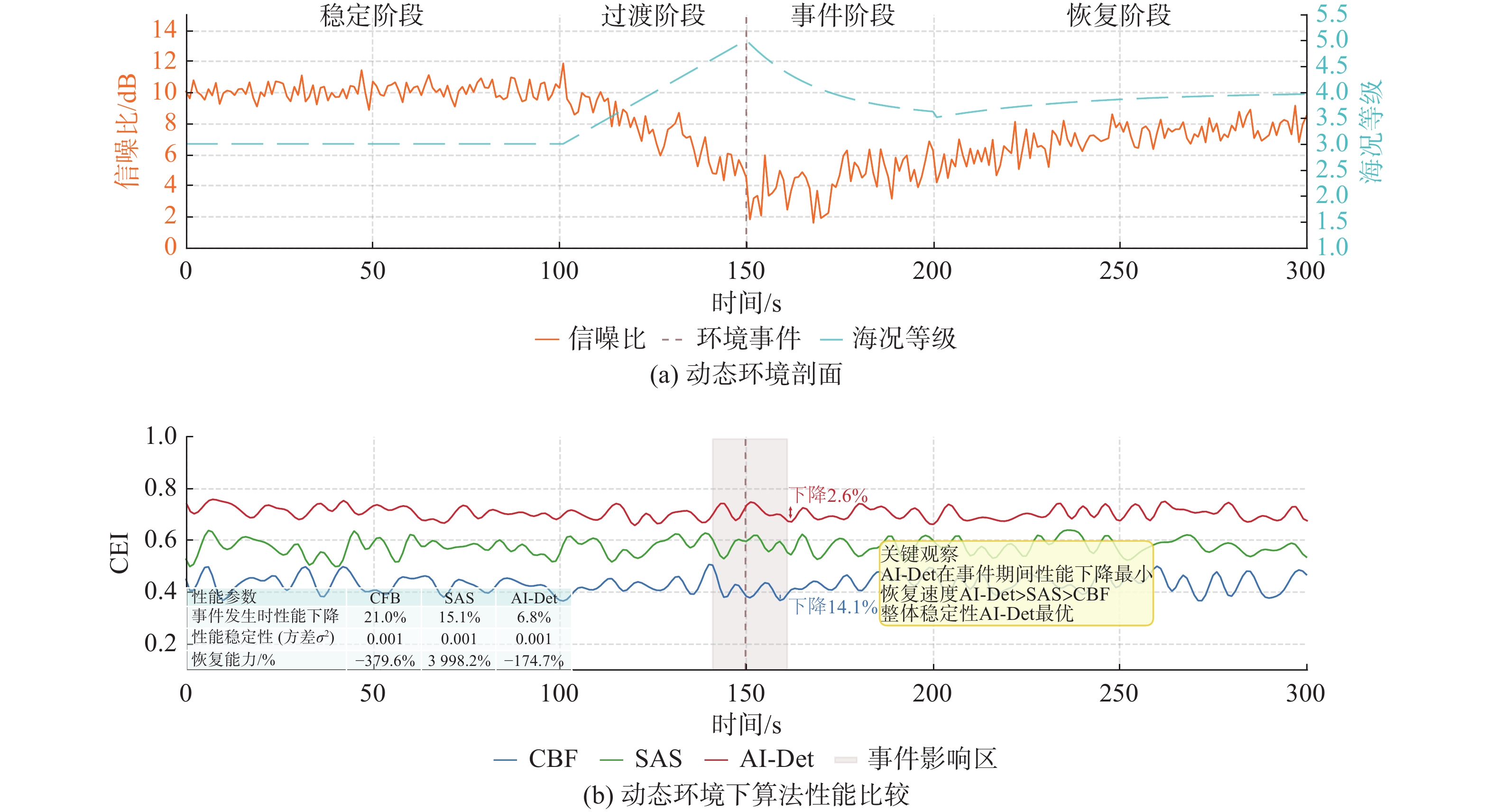
摘要: 水下小目标探测效能评估是保障海洋安全与资源开发的核心难题。传统静态评估方法依赖固定环境参数与单一指标, 难以反映算法在复杂时变海洋环境中的动态适应能力。针对这一瓶颈, 文中提出一种基于Python的多指标融合动态效能评估方法, 建立了环境耦合的动态检测概率模型, 将经典检测理论扩展至时变海洋环境; 将加权几何平均引入综合效能指数(CEI)建模; 设计并开发了水下探测动态评估系统(UDDES), 支持动态环境仿真、多算法并行测试与多维效能可视化分析。仿真实验结果表明, AI-Det的检测概率较传统波束形成(CBF)提升约99.8%; 在包含海况突变、SNR骤降的动态环境应激测试中, AI-Det的CEI均值较CBF提升36.5%, 鲁棒性系数提高44.8%, 跟踪稳定度误差降低55.3%。研究表明, 所提框架与系统有效解决了传统静态评估无法量化动态性能演化的问题, 为水下探测算法的闭环测试、优化选型及效能预测提供了系统的理论方法与工程工具。Abstract: The evaluation of underwater small target detection effectiveness is a core challenge for ensuring maritime security and resource exploitation. Traditional static evaluation methods rely on fixed environmental parameters and single metrics, making it difficult to capture the dynamic adaptability of algorithms in complex and time-varying marine environments. To address this bottleneck, this paper proposed a novel dynamic effectiveness evaluation method based on multi-indicator fusion using Python. An environment-coupled dynamic detection probability model was established, extending classical detection theory to time-varying marine environments. The weighted geometric mean was introduced into the modeling of the comprehensive effectiveness index(CEI). An underwater detection dynamic evaluation system(UDDES) was designed and developed, supporting dynamic environment simulation, parallel testing of multiple algorithms, and multi-dimensional effectiveness visualization analysis. Simulation experimental results demonstrate that the detection probability of AI-Det is improved by approximately 99.8% compared with conventional beamforming(CBF). In dynamic environment stress tests involving sudden sea state deterioration and SNR drops, the mean CEI of AI-enhanced algorithms is increased by 36.5% over CBF, along with a 44.8% improvement in robustness coefficient and a 55.3% reduction in tracking stability error. This study shows that the proposed framework and system effectively overcome the inability of traditional static evaluation to quantify dynamic performance evolution, providing systematic theoretical methods and engineering tools for closed-loop testing, optimal selection, and effectiveness prediction of underwater detection algorithms.
-
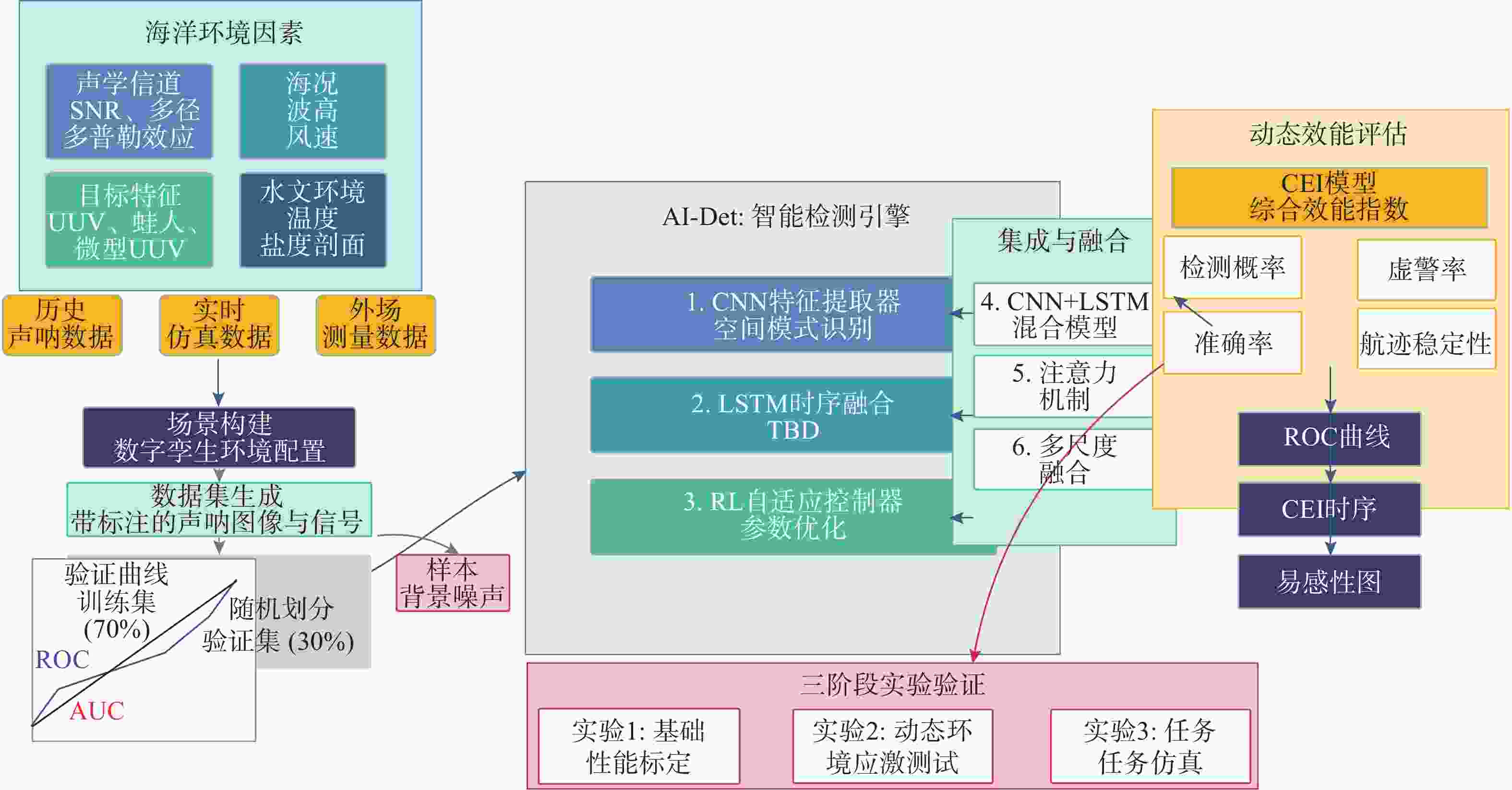
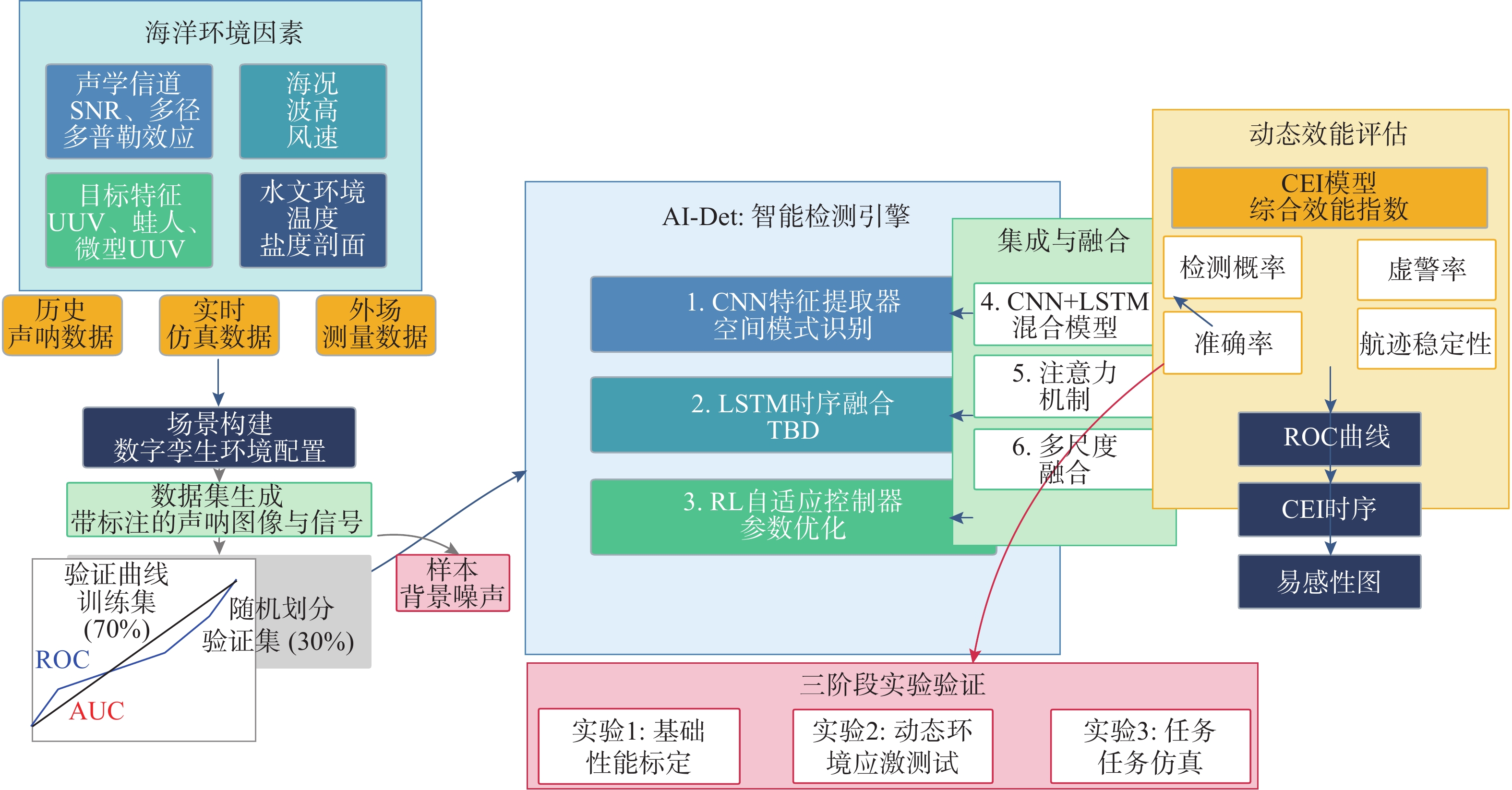
图 1 水下探测动态评估系统技术路线图
Figure 1. Technical roadmap of the underwater detection dynamic evaluation system
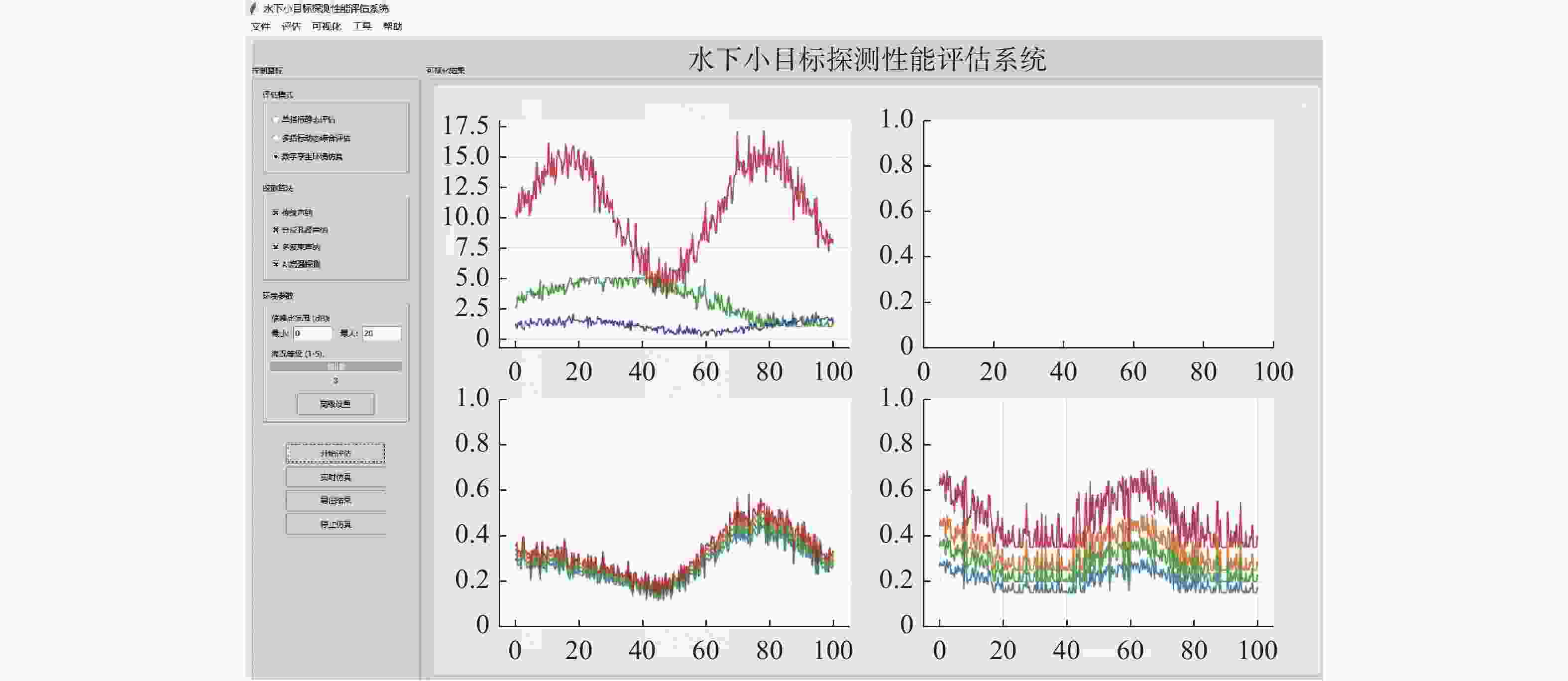
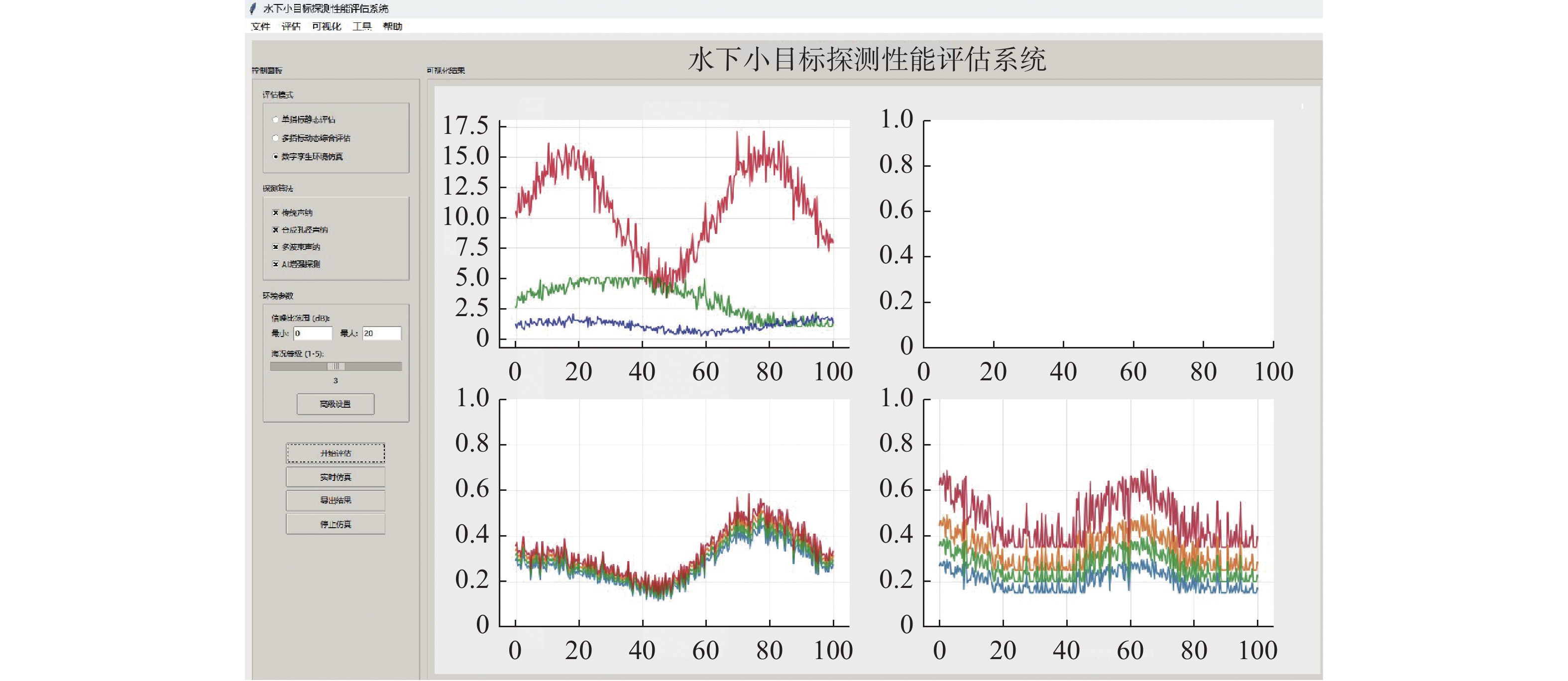
图 2 水下小目标探测效能评估系统界面
Figure 2. Interface of the underwater small target detection effectiveness evaluation system
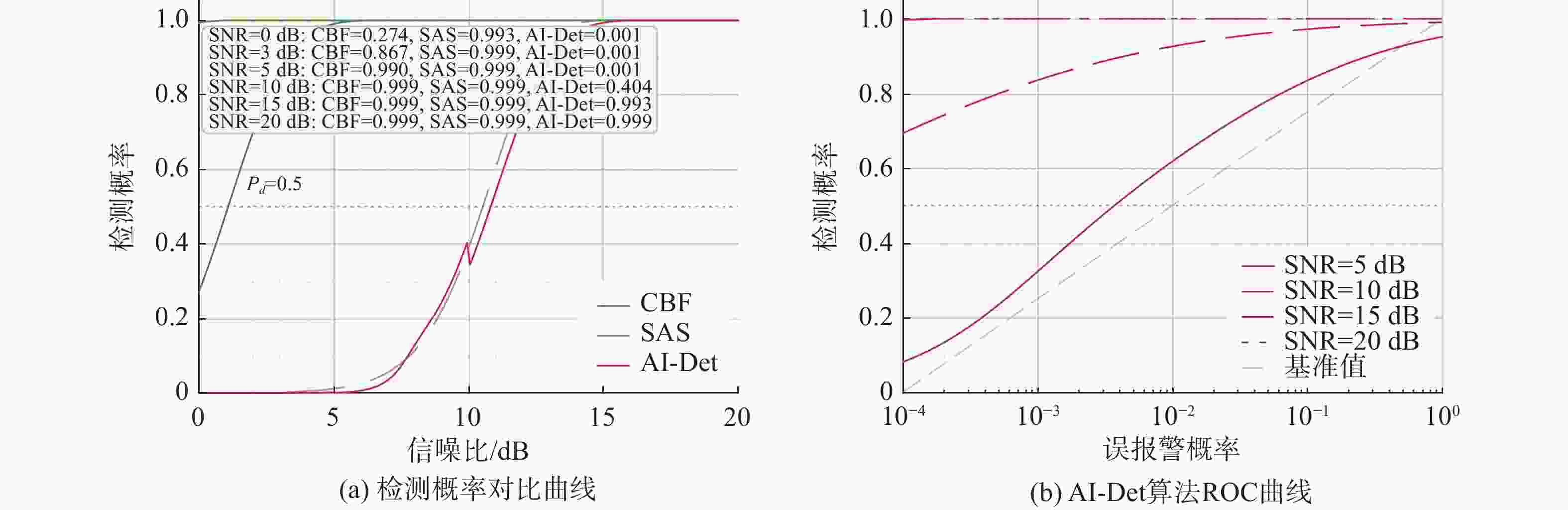
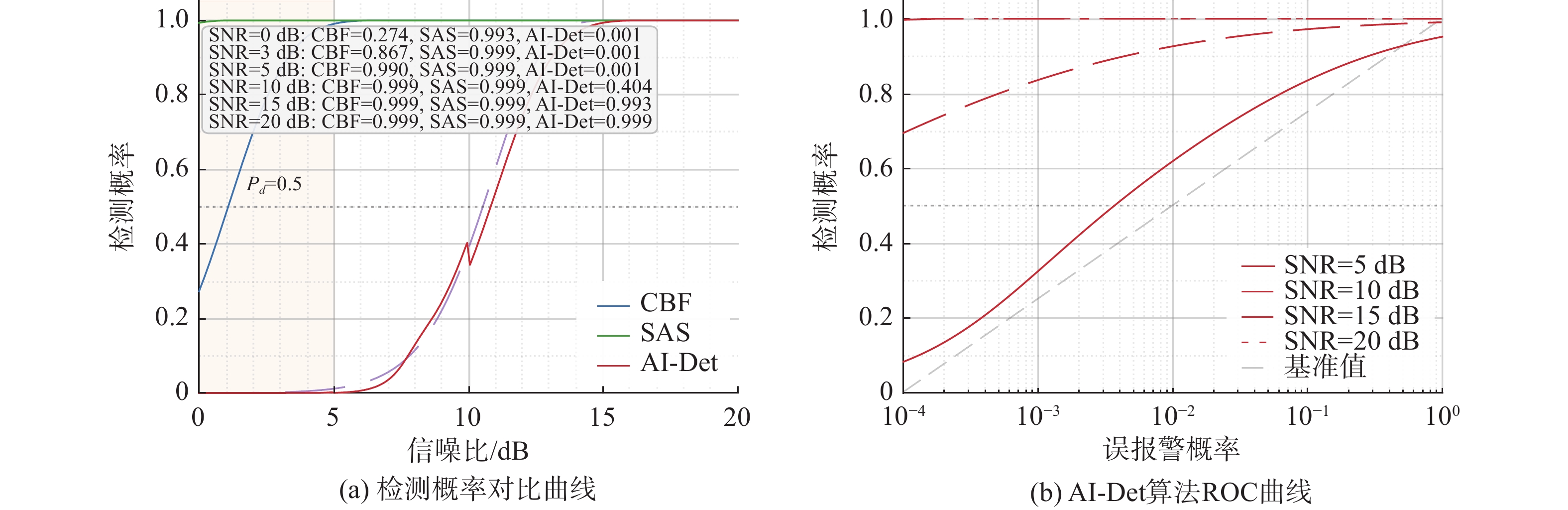
图 3 不同算法检测概率对比及AI-Det算法的ROC曲线
Figure 3. Comparison of detection probabilities among different algorithms and ROC of the AI-Det algorithm
表 1 UDDES技术架构与实现方案
Table 1. Technical architecture and implementation scheme of the UDDES
架构分层 核心模块 技术选型/实现方案 关键指标 前端展示层 GUI PyQt5 + QCustomPlot 刷新率≥20 帧/s 业务逻辑层 场景设定、算法调度、效能解算 Python3.9 + NumPy/SciPy 并行测试算法≥4种 环境仿真引擎 声传播、噪声场、海况建模 Bellhop + 数据修正 更新步长0.1 s, 统计偏差≤15% 数据持久层 实验数据、算法库、配置管理 SQLite + HDF5 单次实验数据量≤200 MB 计算加速层 并行计算、代理模型推理 multiprocessing + ONNX Runtime 代理模型推理≤0.5 ms  下载: 导出CSV
下载: 导出CSV
表 2 动态环境应激测试中各算法效能指标对比(均值±标准差)
Table 2. Comparison of effectiveness metrics of algorithms in the dynamic environment stress test (mean ± standard deviation)
算法 检测概率 识别率 跟踪稳定度 鲁棒性系数 CBF 0.63 ± 0.21 0.51 ± 0.18 0.47 ± 0.15 0.58 ± 0.22 SAS 0.74 ± 0.16 0.68 ± 0.14 0.33 ± 0.11 0.71 ± 0.18 AI-Det 0.86 ± 0.09 0.79 ± 0.10 0.21 ± 0.06 0.84 ± 0.12
下载: 导出CSV
-
[1] 邓玉鑫, 刘雄厚, 杨益新. 浅海环境中用于目标深度属性判别的线谱起伏特征量分析[J]. 物理学报, 2024, 73(13): 181-195. doi: 10.7498/aps.73.20231911Deng Y X, Liu X H, Yang Y X. Analysis of fluctuation characteristics of line spectrum for target depth attribute discrimination in shallow water environments[J]. Acta Physica Sinica, 2024, 73(13): 181-195. doi: 10.7498/aps.73.20231911 [2] 邢佳艺, 邓锴, 王长红, 等. 基于SDP优化测距的相对定位误差校正方法[J]. 水下无人系统学报, 2025, 33(6): 979-987. doi: 10.11993/j.issn.2096-3920.2025-0099Xing J Y, Deng K, Wang C H, et al. Relative positioning error correction method based on SDP-optimized ranging[J]. Journal of Unmanned Undersea Systems, 2025, 33(6): 979-987. doi: 10.11993/j.issn.2096-3920.2025-0099 [3] 王耀南, 安果维, 王传成, 等. 智能无人系统技术应用与发展趋势[J]. 中国舰船研究, 2022, 17(5): 9-26. doi: 10.19693/j.issn.1673-3185.02705Wang Y N, An G W, Wang C C, et al. Application and development trends of intelligent unmanned system technology[J]. Chinese Journal of Ship Research, 2022, 17(5): 9-26. doi: 10.19693/j.issn.1673-3185.02705 [4] 王学敏, 孙明明, 刘贤忠. 水下目标检测前跟踪算法研究综述[J]. 兵器装备工程学报, 2024, 45(12): 99-108.Wang X M, Sun M M, Liu X Z. A review of track-before-detect algorithms for underwater targets[J]. Journal of Ordnance Equipment Engineering, 2024, 45(12): 99-108. [5] 王旭, 李金明, 毛昭勇, 等. 基于组合赋权TOPSIS的智能UUV目标识别与反对抗效能评估[J]. 水下无人系统学报, 2024, 32(5): 779-786.Wang X, Li J M, Mao Z Y, et al. Intelligent UUV target recognition and countermeasure effectiveness evaluation based on combined weighting TOPSIS[J]. Journal of Unmanned Undersea Systems, 2024, 32(5): 779-786. [6] 肖大为, 喻鹏, 谢涛涛. 水下小目标探测的侧扫声呐方法优化研究[J]. 舰船电子工程, 2025, 45(5): 170-173.Xiao D W, Yu P, Xie T T. Optimization of side-scan sonar methods for underwater small target detection[J]. Ship Electronic Engineering, 2025, 45(5): 170-173. [7] 王若男, 冯春, 赵政钦, 等. 水下低分辨率小目标检测算法分析[J]. 船舶工程, 2026, 48(2): 98-108.Wang R N, Feng C, Zhao Z Q, et al. Analysis of underwater low-resolution small target detection algorithms[J]. Ship Engineering, 2026, 48(2): 98-108. [8] 梁俊华, 许鹏, 蔡燕. 基于YOLOv8n的水下小目标检测方法[J]. 电子设计工程, 2026, 34(2): 19-25. doi: 10.14022/j.issn1674-6236.2026.02.004Liang J H, Xu P, Cai Y. Underwater small target detection method based on YOLOv8n[J]. Electronic Design Engineering, 2026, 34(2): 19-25. doi: 10.14022/j.issn1674-6236.2026.02.004 [9] 刘同来, 陈炫宙, 卢利琼, 等. 基于改进YOLOv8和多尺度融合的水下生物检测模型[J/OL]. 仲恺农业工程学院学报, 2026-01-20. https://link.cnki.net/urlid/44.1660.s.20251107.1149.002.Liu T L, Chen X Z, Lu L Q, et al. An underwater biological detection model based on improved YOLOv8 and multi-scale fusion[J/OL]. Journal of Zhongkai University of Agriculture and Engineering, 2026-01-20. https://link.cnki.net/urlid/44.1660.s.20251107.1149.002. [10] 吴闵奇, 杨元华, 李航, 等. 基于图Transformer和RT-DETR的轻量化水下小目标检测[J/OL]. 计算机应用, 2026-01-20. https://www.joca.cn/CN/10.11772/j.issn.1001-9081.2025050565.Wu M Q, Yang Y H, Li H, et al. Lightweight underwater small target detection based on graph transformer and RT-DETR[J/OL]. Journal of Computer Applications, 2026-01-20. https://www.joca.cn/CN/10.11772/j.issn.1001-9081.2025050565. [11] 李海龙, 黄孙港, 饶兴昌. 跨尺度特征融合的自适应水下目标检测算法[J]. 电子测量技术, 2025, 48(13): 129-138.Li H L, Huang S G, Rao X C. Adaptive underwater target detection algorithm based on cross-scale feature fusion[J]. Electronic Measurement Technology, 2025, 48(13): 129-138. [12] 谌雨章, 黄逸姿, 张钧涵. 基于多速率空洞卷积的多尺度水下小目标检测[J]. 计算机工程, 2023, 49(6): 257-264. doi: 10.19678/j.issn.1000-3428.0064754Chen Y Z, Huang Y Z, Zhang J H. Multi-scale underwater small target detection based on multi-rate dilated convolution[J]. Computer Engineering, 2023, 49(6): 257-264. doi: 10.19678/j.issn.1000-3428.0064754 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 237
- HTML全文浏览量: 85
- PDF下载量: 132
- 被引次数: 0