A Review of Energy and Propulsion Technology Development for Autonomous Undersea Vehicles
-
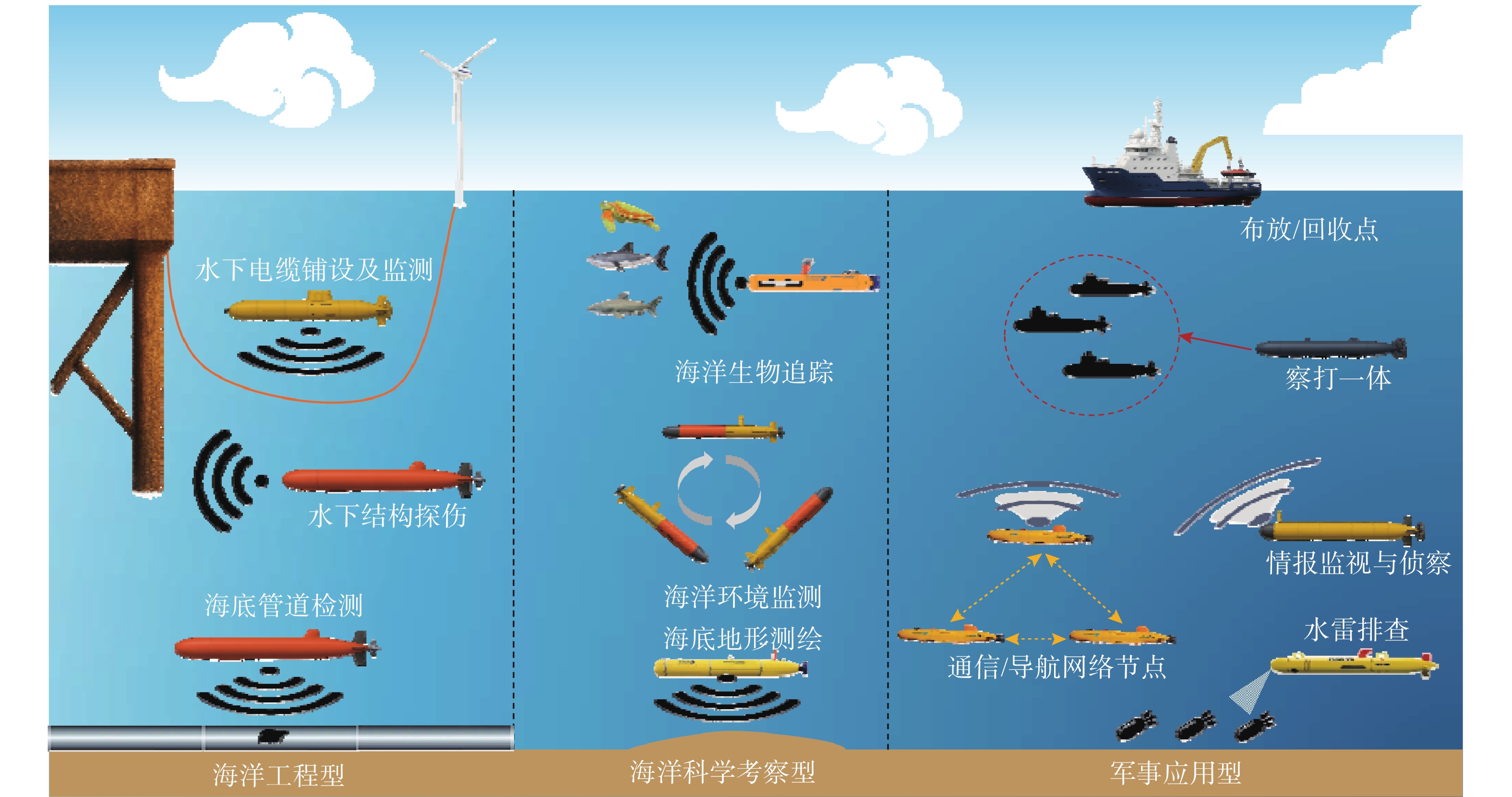
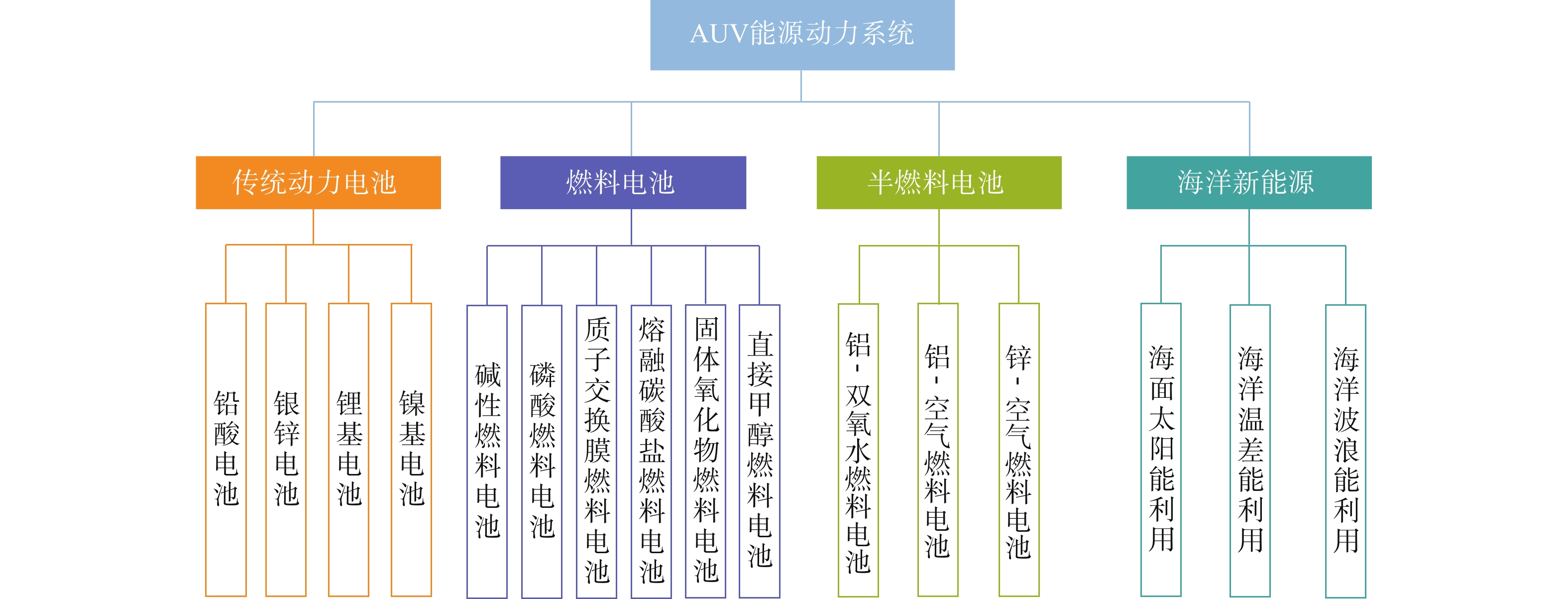
摘要: 自主水下航行器(AUV)在海洋工程、海洋科考和军事应用中发挥着重要作用。能源动力系统是AUV的核心系统之一, 其性能直接影响AUV续航时间、作业范围和作业效率。文中从不同维度对国内外AUV进行了分类, 分析了AUV能源动力系统的主要特征和应用情况, 重点探讨了AUV高能量密度电池技术、水下充电技术、高密度储氢/储氧技术、电池管理技术等能源动力关键技术, 对AUV能源动力技术发展方向进行了展望, 以期为AUV能源动力系统的发展提供有益参考。
-
关键词:
- 自主水下航行器 /
- 动力电池 /
- 燃料电池 /
- 高密度储氢/储氧技术
Abstract: Autonomous undersea vehicles(AUVs) play a pivotal role in ocean engineering, marine scientific exploration, and military operations. Among their core subsystems, the energy and power system is particularly critical, as its performance directly determines the vehicle’s endurance, operational range, and overall efficiency. This study classifies AUVs from multiple perspectives and examines the principal characteristics and applications of their energy and power systems. Particular emphasis is placed on key enabling technologies, including high-energy-density battery systems, underwater charging methods, high-density hydrogen and oxygen storage, and advanced battery management. Finally, the paper outlines prospective directions for energy and power technologies in AUVs, with the aim of providing valuable insights for the future development of their energy systems. -
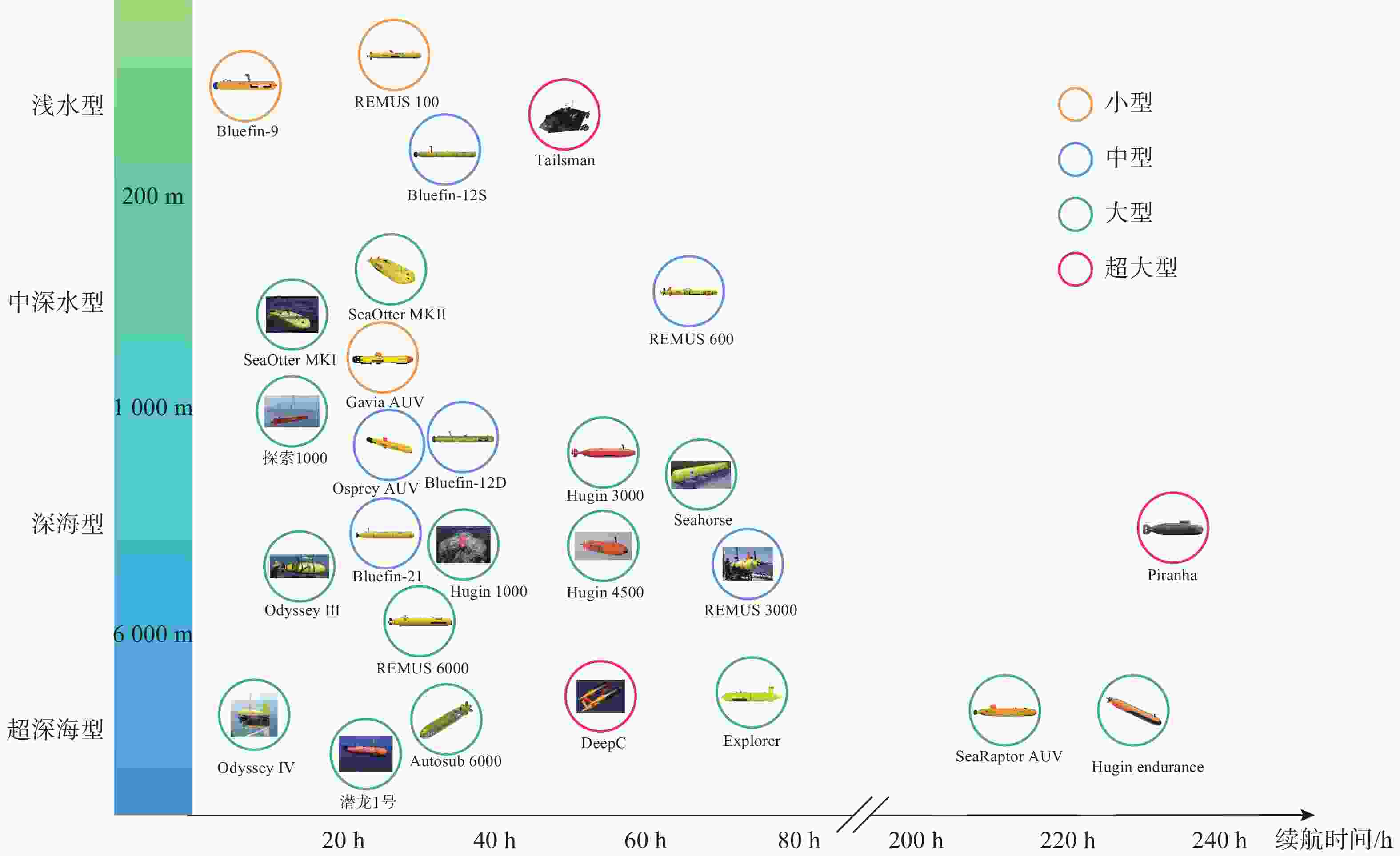
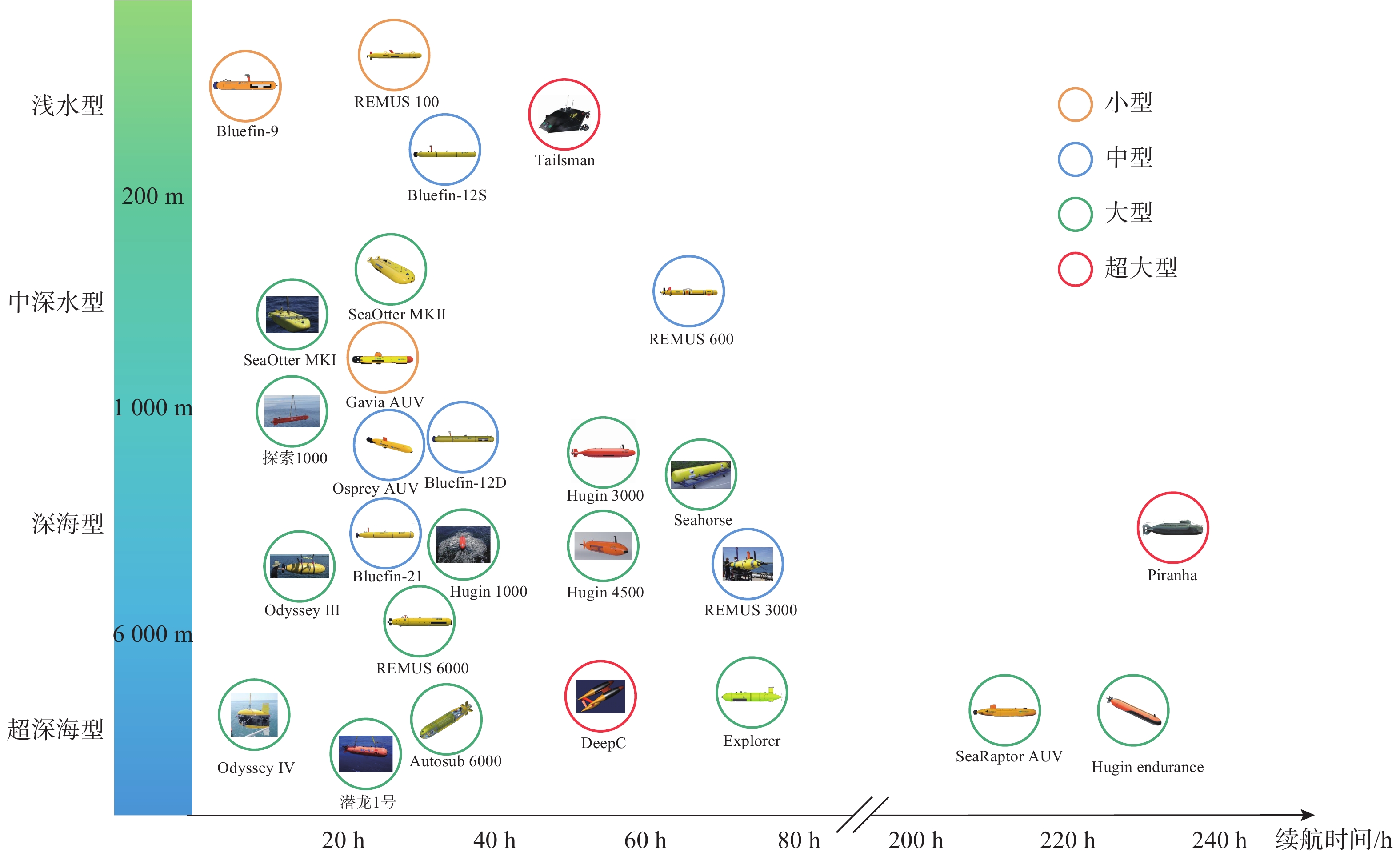
图 1 典型AUV截面尺寸分类、工作深度及续航时间
Figure 1. Typical AUV cross-section dimensions, operating depth and endurance time

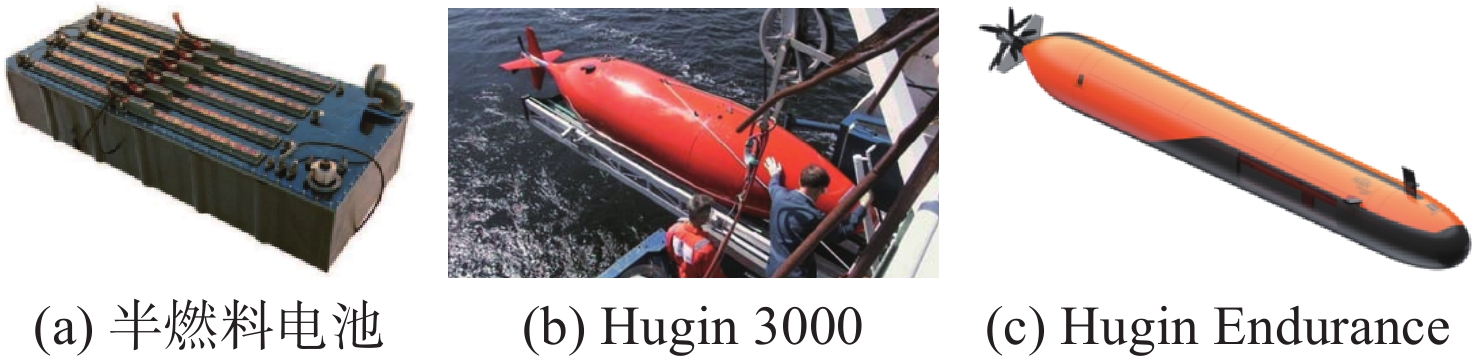
图 8 Hugin系列AUV及其搭载的半燃料电池系统
Figure 8. Hugin series AUVs and their semi fuel cell systems
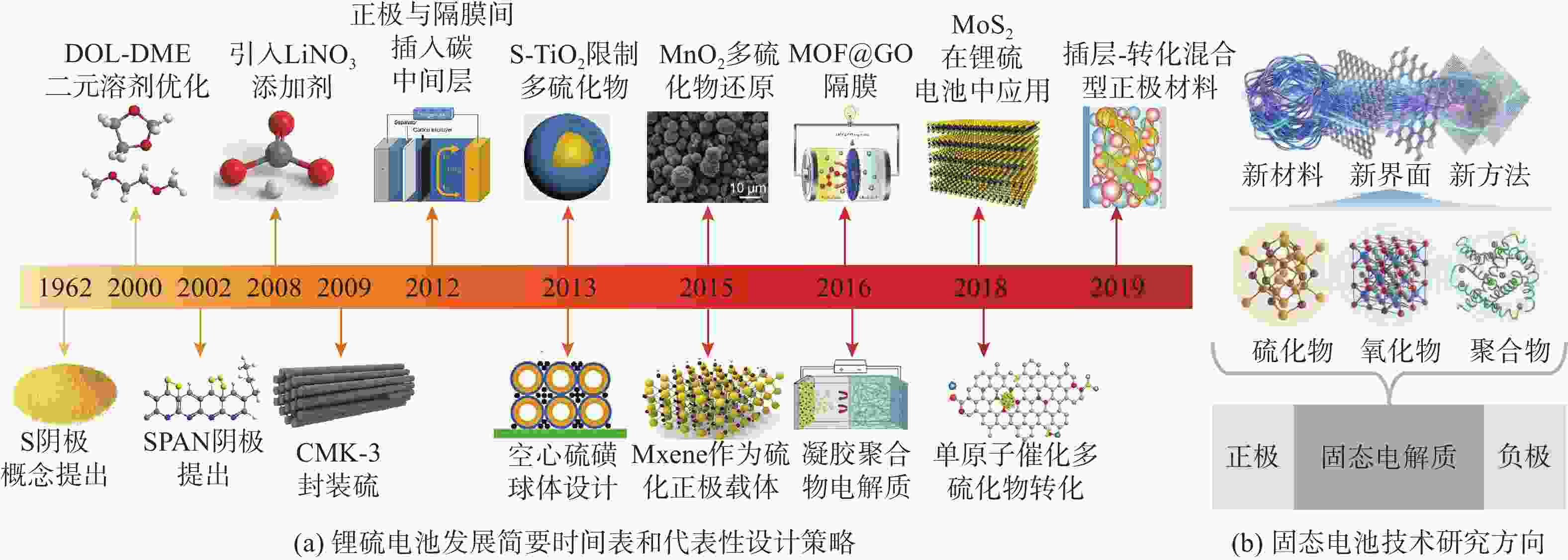
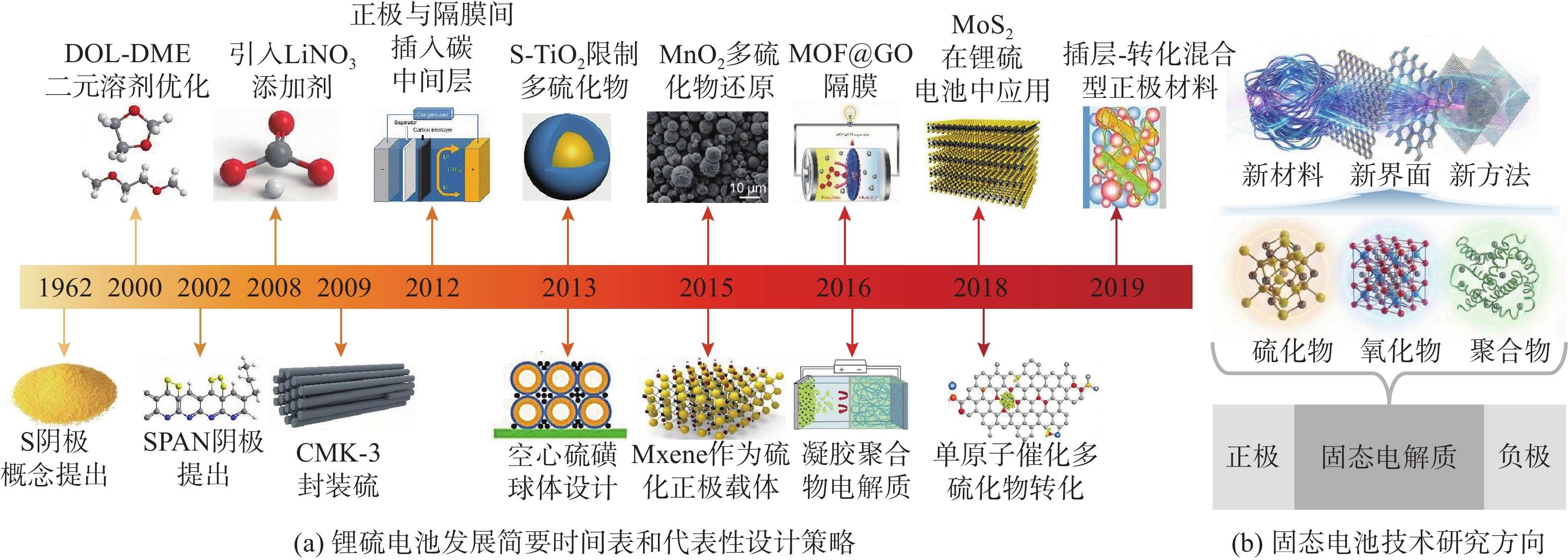
图 11 锂硫电池发展简要时间表和代表性设计策略
Figure 11. Brief timeline and representative design strategies for lithium-sulfur battery development
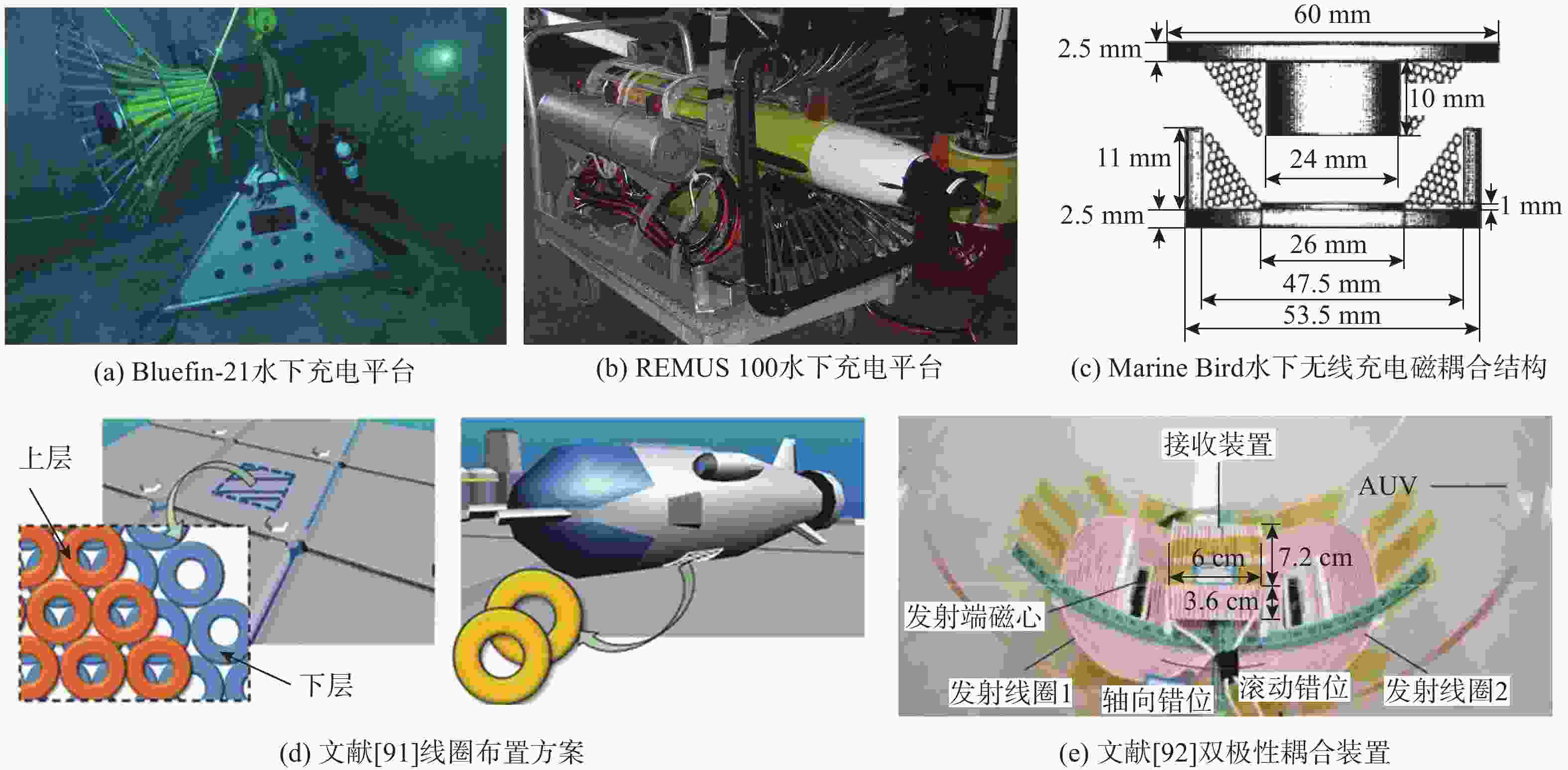
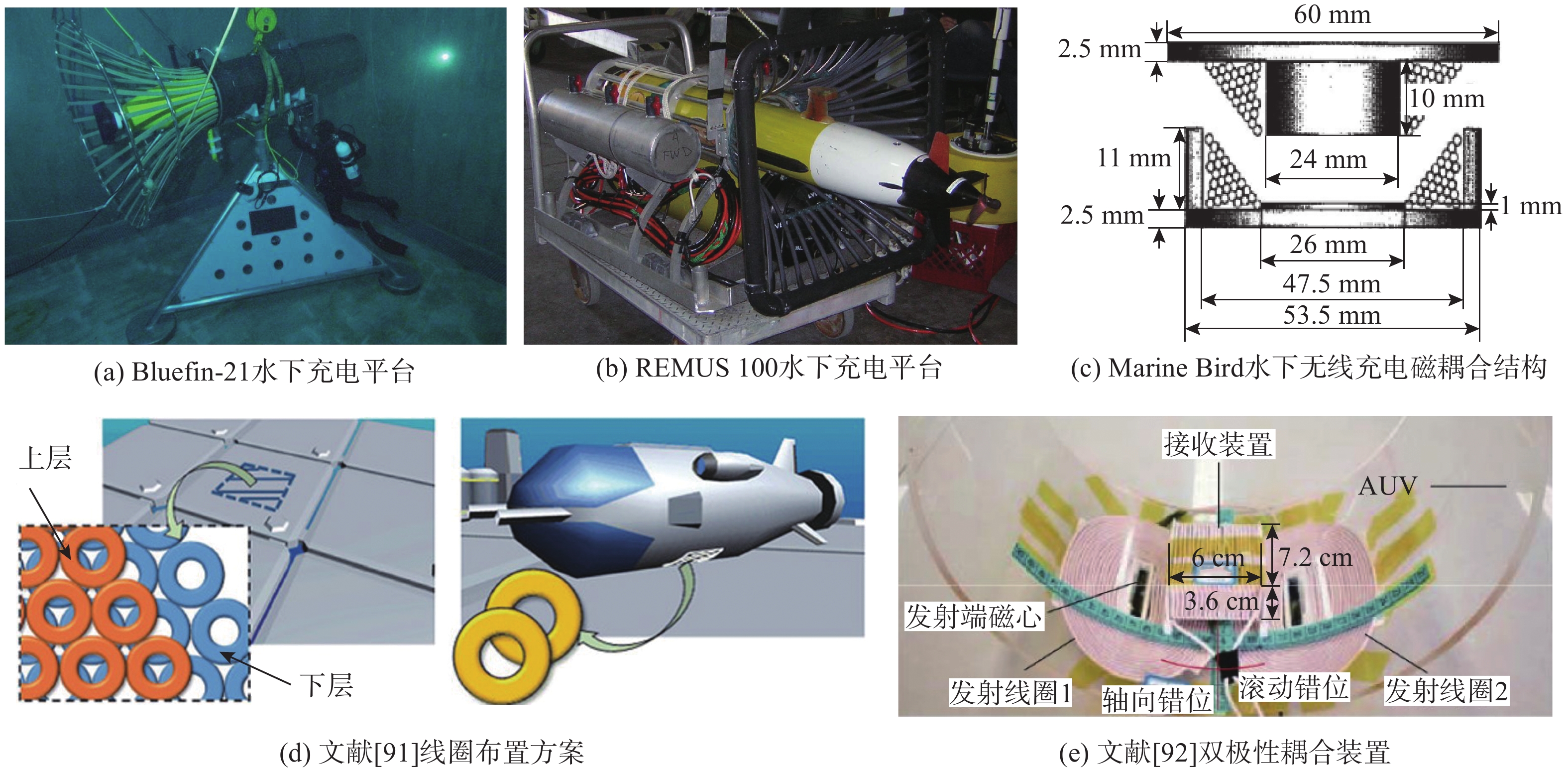
图 12 AUV水下充电平台及无线充电磁耦合装置
Figure 12. Underwater charging platforms and wireless charging magnetic coupling devices for AUVs
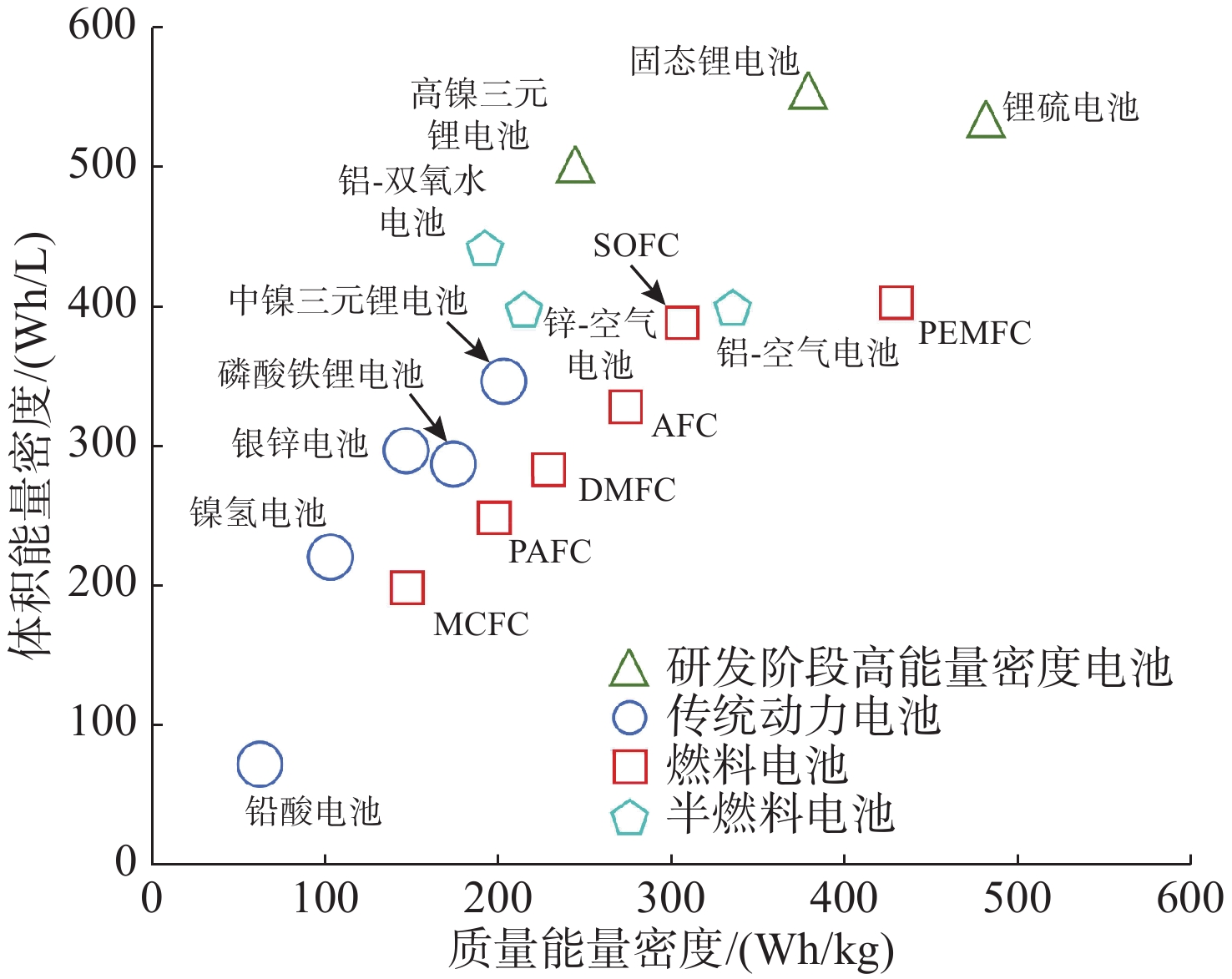
表 1 AUV使用的传统动力电池特性及典型平台
Table 1. Characteristics of traditional power batteries used in AUVs and typical platforms
电池类型 质量能
量密度
/(Wh/kg)体积能
量密度
/(Wh/L)循环周
期/次典型AUV 所属
国别铅酸电池 30~80 65~95 200~300 探索者号 中国 MTV 美国 REMUS-100 美国 银锌电池 100~300 150~300 50~100 CR-01 中国 CR-02 中国 Odyssey 美国 Theseus 加拿大 锂离子
电池120~210 250~350 500~ 1000 潜龙一号 中国 Bluefin-12 美国 Alister 3000 法国 LMRS 美国  下载: 导出CSV
下载: 导出CSV
表 2 不同燃料电池的工作特性
Table 2. Operating characteristics of different fuel cells
特性 AFC PAFC PEMFC MCFC SOFC DMFC 工作温度/℃ 60~250 150~210 60~110 500-~700 500~1 000 70~130 电转化效率/% 60~70 40~50 40~60 50~60 40~60 25~40 燃料 氢气 氢气 氢气 甲烷、氢气、
一氧化碳甲烷、氢气、
一氧化碳甲醇 氧化剂 氧气 氧气 氧气 氧气 氧气 氧气 功率密度
/(kW·m−3)≈1 0.8~1.9 3.8~6.5 1.5~2.6 4.20~19.25 ≈0.6 循环寿命/h 8 000 >50 000 2 000~3 000 7 000~8 000 1 000 1 000~4 500
下载: 导出CSV
-
[1] Cao S H, Zhang C X, Wang G Z, et al. Development situation and military application of autonomous underwater vehicle[J]. Ship Engineering, 2019, 41(2): 79-84. [2] Gafurov S A, Klochkov E V. Autonomous unmanned underwater vehicles development tendencies[J]. Procedia Engineering, 2015, 106: 141-148. doi: 10.1016/j.proeng.2015.06.017 [3] Li Y P, Li S, Zhang A Q. Research status of autonomous & remotely operated vehicle[J]. Journal of Engineering Studies, 2016, 8(2): 217-222. [4] 李硕, 吴园涛, 李琛, 等. 水下机器人应用及展望[J]. 中国科学院院刊, 2022, 37(7): 910-920. doi: 10.3969/j.issn.1004-2490.2025.05.009Li S, Wu Y T, Li C, et al. Application and prospect of unmanned underwater vehicle[J]. Bulletin of Chinese Academy of Sciences, 2022, 37(7): 910-920. doi: 10.3969/j.issn.1004-2490.2025.05.009 [5] Fletcher B. UUV master plan: A vision for Navy UUV development[C]//OCEANS 2000 MTS/IEEE Conference and Exhibition, 2000: 65-71. [6] 冯景祥, 姚尧, 潘峰, 等. 国外水下无人装备研究现状及发展趋势[J]. 舰船科学技术, 2021, 43(12): 8. doi: 10.3404/j.issn.1672-7649.2021.12.001Feng J X, Yao Y, Pan F, et al. Existence and development trend of underwater unmanned equipment in foreign countries[J]. Ship Science and Technology, 2021, 43(12): 8. doi: 10.3404/j.issn.1672-7649.2021.12.001 [7] United States Department of Defense. Unmanned systems roadmap: fiscal years 2007-2032[R]. Washington, DC: United States Department of Defense, 2007. [8] 宋保维, 潘光, 张立川, 等. 自主水下航行器发展趋势及关键技术[J]. 中国舰船研究, 2022, 17(5): 27-44.Song B W, Pang G, Zhang L C, et al. Development trend and key technologies of autonomous underwater vehicles[J]. Chinese Journal of Ship Research, 2022, 17(5): 27-44. [9] Ministère Des Armées. Stratégie ministérielle de maîtrise des fonds marins[R]. Paris: Ministère des Armées, 2022. [10] 战扬. 北约拓展海上无人作战能力[N]. 解放军报, 2020-05-27(10). [11] Australian Government, Department of Defence. First autonomous undersea vehicle ‘Ghost Shark’ prototype ready[EB/OL]. (2024-04-18)[2025-12-12]. https://www.minister.defence.gov.au/media-releases/2024-04-18/first-autonomous-undersea-vehicle-ghost-shark-prototype-ready. [12] Le plan 2035 qui fera de I’Allemagne une grande puissance militaire[EB/OL]. [2025-12-12]. https://entrevue.fr/le-plan-2035-qui-fera-de-lallemagne-une-grande-puissance-militaire/. [13] “中国学科及前沿领域发展战略研究(2021—2035)”项目组. 中国海洋科学2035发展战略[M]. 北京: 科学出版社, 2023. [14] 陈今茂, 王旭东, 熊春华, 等. 无人水下航行器动力电池研究现状及发展趋势[C]//第五届水下无人系统技术高峰论坛, 2022: 355-362. [15] Akhtman J, Furlong M, Palmer A, et al. Soton AUV: The design and development of a small, manoeuvrable autonomous underwater vehicle[J]. Underwater Technology, 2008, 28(1): 31-34. [16] Kwon L, Kang J G, Baik K D, et al. Advancement and applications of PEMFC energy systems for large-class unmanned underwater vehicles: A review[J]. International Journal of Hydrogen Energy, 2024, 79: 277-294. doi: 10.1016/j.ijhydene.2024.07.016 [17] Andrew R K, Howe B M, Mercer J A. Aspect-dependent radiated noise analysis of an underway autonomous underwater vehicle[J]. The Journal of the Acoustical Society of America, 2012, 132(5): EL351-EL357. doi: 10.1121/1.4754419 [18] Zhu M F, Ma L R, Luo J B. L*—An index for evaluating long range performance of autonomous underwater vehicles (AUVs)[J]. Friction, 2024, 12: 2205-2221. doi: 10.1007/s40544-023-0842-7 [19] D’amore-Domenech R, Raso M A, Villalba-Herreros A, et al. Autonomous underwater vehicles powered by fuel cells: Design guidelines[J]. Ocean Engineering, 2018, 153: 387-398. doi: 10.1016/j.oceaneng.2018.01.117 [20] Bae I, Hong J. Survey on the developments of unmanned marine vehicles: Intelligence and cooperation[J]. Sensors, 2023, 23(10): 4643. doi: 10.3390/s23104643 [21] Hydroid. REMUS 600 autonomous underwater vehicle: HYDR-14002B brochure[R]. Pocasset: Hydroid, 2012. [22] Hornfeld W. ATLAS AUVs for offshore applications: status and perspectives[C]//Proceedings of the ASME 2005 24th International Conference on Offshore Mechanics and Arctic Engineering, 2005: 627-636. [23] Atlas Elektronik. ATLAS SeaOtter: SeaOtter unmanned vehicles[R]. Bremen: Atlas Elektronik GmbH, 2015. [24] Teledyne Gavia. Gavia autonomous underwater vehicle: technical specifications 500 m & 1000 m[R]. Kópavogur: Teledyne Gavia, 2019. [25] Wang Y X, Liu J F, Liu T J, et al. A numerical and experimental study on the hull-propeller interaction of a long range autonomous underwater vehicle[J]. China Ocean Engineering, 2019, 33: 573-582. doi: 10.1007/s13344-019-0055-z [26] Teledyne Marine. Osprey AUV[EB/OL]. [2025-12-11]. https://www.teledynemarine.com/brands/gavia/osprey-auv. [27] Bluefin Robotics Corporation. Bluefin-12D[R]. Quincy: Bluefin Robotics Corporation, 2010. [28] General Dynamics Mission Systems. Bluefin-21 unmanned underwater vehicle(UUV)[R]. Quincy: General Dynamics Mission Systems, 2025. [29] Rentschler M E, Hover F S, Chryssostomidis C. System identification of open-loop maneuvers leads to improved AUV flight performance[J]. IEEE Journal of Oceanic Engineering, 2006, 31(1): 200-208. doi: 10.1109/JOE.2005.858369 [30] Kongsberg Maritime. Naval AUV product range: The HUGIN & REMUS family[R]. Horten: Kongsberg Maritime, 2008. [31] Kongsberg Discovery. HUGIN 3000 autonomous underwater vehicle (AUV)[R]. Horten: Kongsberg Discovery, 2024. [32] Hagen P E, Lågstad P, Rekdal S. Transitioning the HUGIN 1000-MR AUV into service in the Royal Norwegian Navy[C]//UDT Europe, 2007. [33] Dzielski E, Tangirala C, Moyer W W, et al. NAVOCEANO Seahorse AUV design, testing, and capabilities[C]//OCEANS 02 MTS/IEEE, 2002: 151-155. [34] Woods Hole Oceanographic Institution. REMUS 3000[EB/OL]. [2025-12-11]. https://www2.whoi.edu/site/osl/vehicles/remus-3000/. [35] Huntington Ingalls Industries. REMUS 6000 unmanned underwater vehicle[R]. Newport News: HII, 2022. [36] Wu J G, Liu J, Xu H X. A variable buoyancy system and a recovery system developed for a deep-sea AUV Qianlong I[C]//OCEANS 2014-TAIPEI, 2014: 1-4. [37] Eskesen J, Owens D, Soroka M, et al. Design and performance of Odyssey IV: A deep ocean hover-capable AUV[R]. Cambridge: MIT Sea Grant College Program, 2009. [38] Mcphail S. Autosub6000: A deep diving long range AUV[C]//Proceedings of USYS08, 2008: 1-6. [39] Hornfeld W. DeepC: The new deep water AUV generation[C]//Proceedings of the ASME 2003 22nd International Conference on Offshore Mechanics and Arctic Engineering. Cancun: ASME, 2003: 713-721. [40] International submarine engineering ltd. EXPLORER autonomous underwater vehicle[R]. Port Coquitlam: International Submarine Engineering Ltd., 2024. [41] Teledyne marine. SeaRaptor AUV: deep water autonomous underwater vehicle[R]. Kópavogur: Teledyne Gavia, 2025. [42] Kongsberg Maritime. HUGIN Endurance AUV[EB/OL]. [2025-12-11]. https://www.kongsberg.com. [43] Jacobi M, Karimanzira D. Guidance of AUVs for autonomous underwater inspection[J]. AT-Automatisierungstechnik, 2015, 63(5): 380-388. doi: 10.1515/auto-2015-0019 [44] Hu S Y, Feng A, Shi J H, et al. Underwater gas leak detection using an autonomous underwater vehicle(robotic fish)[J]. Process Safety and Environmental Protection, 2022, 167: 89-96. doi: 10.1016/j.psep.2022.09.002 [45] Zhang H W, Zhang S T, Wang Y H, et al. Subsea pipeline leak inspection by autonomous underwater vehicle[J]. Applied Ocean Research, 2021, 107: 102321. doi: 10.1016/j.apor.2020.102321 [46] Jawhar I, Mohamed N, Al-Jaroodi J, et al. An architecture for using autonomous underwater vehicles in wireless sensor networks for underwater pipeline monitoring[J]. IEEE Transactions on Industrial Informatics, 2019, 15(3): 1329-40. doi: 10.1109/TII.2018.2848290 [47] Kimura R, Choyekh M, Kato N, et al. Guidance and control of an autonomous underwater robot for tracking and monitoring spilled plumes of oil and gas from seabed[C]//Proceedings of the International Offshore and Polar Engineering Conference, 2013: 133780086. [48] Kato N, Ito Y, Kojima J, et al. Control performance of autonomous underwater vehicle “Aqua Explorer 1000” for inspection of underwater cables[C]//Proceedings of OCEANS’94, 1994: 363845. [49] Vasileiou M, Manos N, Vasilopoulos N, et al. Autonomous underwater vehicle: A 3D-printed underwater vehicle for inspection at fisheries[J]. Journal of Mechanisms and Robotics-Transactions of the ASME, 2024, 16(4): 041003. doi: 10.1115/1.4062355 [50] Katzschmann R K, Delpreto J, Maccurdy R, et al. Exploration of underwater life with an acoustically controlled soft robotic fish[J]. Science Robotics, 2018, 3(16): 3449. doi: 10.1126/scirobotics.aar3449 [51] Dodge K L, Kukulya A L, Burke E, et al. Turtlecam: A “Smart” autonomous underwater vehicle for investigating behaviors and habitats of sea turtles[J]. Frontiers in Marine Science, 2018, 5: 347131. doi: 10.3389/fmars.2018.00090 [52] Lin Y K, Hsiung J, Piersall R, et al. A multi-autonomous underwater vehicle system for autonomous tracking of marine life[J]. Journal of Field Robotics, 2017, 34(4): 757-774. doi: 10.1002/rob.21668 [53] Skomal G B, Hoyos-Padilla E M, Kukulya A, et al. Subsurface observations of white shark Carcharodon carcharias predatory behaviour using an autonomous underwater vehicle[J]. Journal of Fish Biology, 2015, 87(6): 1293-312. doi: 10.1111/jfb.12828 [54] Lu P, Geng W B. Experimental study of autonomous underwater vehicle and application in monitoring marine environment[J]. Shipbuilding of China, 2017, 58(3): 245-50. [55] Allotta B, Conti R, Costanzi R, et al. A low cost autonomous underwater vehicle for patrolling and monitoring[J]. Proceedings of the Institution of Mechanical Engineers Part M-Journal of Engineering for the Maritime Environment, 2017, 231(3): 740-749. doi: 10.1177/1475090216681354 [56] Pampalone V, Milici B. High spatial resolution mapping of water quality and bathymetry with an autonomous underwater vehicle[C]//ICCMSE 2015, 2015, 1702(1): 180006. [57] Lucieer V L, Forrest A L. Emerging mapping techniques for autonomous underwater vehicles(AUVs)[M]//Finkl C W, Makowski C. Seafloor mapping along continental shelves: research and techniques for visualizing benthic environments. Cham, Switzerland: Springer, 2016: 53-67. [58] Gomariz S, Masmitja I, Gonzalez J, et al. GUANAY-II: An autonomous underwater vehicle for vertical/horizontal sampling[J]. Journal of Marine Science and Technology, 2015, 20(1): 81-93. doi: 10.1007/s00773-013-0253-y [59] Bluefin-9 unmanned underwater vehicle(UUV). [EB/OL]. [2025-01-10]. https://gdmissionsystems.com/products/underwater-vehicles/bluefin-9-autonomous-underwater-vehicle. [60] REMUS(vehicle)[EB/OL]. [2025-12-10]. https://en.wikipedia.org/wiki/REMUS_(vehicle). [61] Bao N Y, Hopkin D, Yip H. Considering mine counter-measure exploratory operations conducted by autonomous underwater vehicles[J]. Military Operations Research, 2014, 19(2): 19-34. doi: 10.1002/9781118918937.ch4 [62] 钟宏伟. 国外无人水下航行器装备与技术现状及展望 [J]. 水下无人系统学报, 2017, 25(4) : 215-25.Zhong H W. Review and prospect of equipment and techniques for unmanned undersea vehicle in foreign countries[J]. Journal of Unmanned Undersea System, 2017, 25(4): 215-225. [63] Wang X, Shang J, Luo Z, et al. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles[J]. Renewable & Sustainable Energy Reviews, 2012, 16(4): 1958-1970. doi: 10.1016/j.rser.2011.12.016 [64] 方红伟, 李紫嫣. 自主水下航行器能源系统技术综述[J]. 电力系统及其自动化学报, 2022, 34(8): 18-26. doi: 10.19635/j.cnki.csu-epsa.000965Fang H W, Li Z Y. Overview of energy system techniques for autonomous underwater vehicles[J]. Proceedings of the CSU-EPSA, 2022, 34(8): 18-26. doi: 10.19635/j.cnki.csu-epsa.000965 [65] Mekhilef S, Saidur R, Safari A. Comparative study of different fuel cell technologies[J]. Renewable and Sustainable Energy Reviews, 2012, 16(1): 981-989. doi: 10.1016/j.rser.2011.09.020 [66] Baroutaji A, Wilberforce T, Ramadan M, et al. Comprehensive investigation on hydrogen and fuel cell technology in the aviation and aerospace sectors[J]. Renewable and Sustainable Energy Reviews, 2019, 106: 31-40. doi: 10.1016/j.rser.2019.02.022 [67] Rath R, Kumar P, Mohanty S, et al. Recent advances, unsolved deficiencies, and future perspectives of hydrogen fuel cells in transportation and portable sectors[J]. International Journal of Energy Research, 2019, 43(15): 8931-8955. doi: 10.1002/er.4795 [68] Akinyele D, Olabode E, Amole A. Review of fuel cell technologies and applications for sustainable microgrid systems [J] 2020, 5(3): 225405612. [69] Qasem N A A, Abdulrahman G A Q. A recent comprehensive review of fuel cells: history, types, and applications[J]. International Journal of Energy Research, 2024, 2024(1): 7271748. doi: 10.1155/2024/7271748 [70] Tamura K, Aoki T, Nakamura T, et al. The development of the AUV-Urashima[C]//Proceedings of the Oceans 2000 MTS/IEEE Conference and Exhibition Conference Proceedings, 2000: 139-146. [71] Hyakudome T, Yoshida H, Nakatani T, et al. Development of fuel cell system for underwater power source[C]//Proceedings of the 2013 MTS/IEEE Oceans Bergen, 2013: 1-6. [72] Hornfeld W. Deep C, The AUV for ultra-deep water[EB/OL]. [2025-12-12]. https://www.researchgate.net/publication/228907099_DeepC_the_AUV_for_Ultra-Deep_Water. [73] 黄文飞, 张驰, 陈友鹏, 等. 无人水下航行器发电及储能技术研究[J]. 舰船科学技术, 2024, 46(1): 115-120.Huang W F, Zhang C, Chen Y P, et al. Reviews of power generation and energy storage technology for unmanned underwater vehicles[J]. Ship Science and Technology, 2024, 46(1): 115-120. [74] Scamans G M, Creber D K, Stannard J H, et al. Aluminum fuel cell power sources for long range unmanned underwater vehicles [C]//Proceedings of IEEE Symposium on Autonomous Underwater Vehicle Technology, 1994: 179-186. [75] Vestgard K, Hansen R, Jalving B, et al. The Hugin 3000 survey AUV[C]//The Eleventh International Offshore and Polar Engineering Conference F, 2001: ISOPE-I-01-447. [76] Blidberg D R, Jalbert J C, Ageev M D, et al. Experimental results; The AUSI/IMTP solar powered AUV project[C]//Ocean Community Conference'98: Celebrating 1998 International Year of the Ocean, 1998: 898-902. [77] Webb D C, Simonetti P J, Jones C P. SLOCUM: An underwater glider propelled by environmental energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447-52. doi: 10.1109/48.972077 [78] Bruce P G, Freunberger S A, Hardwick L J, et al. Li-02 and Li-S batteries with high energy storage[J]. Nature Materials, 2012, 11(1): 19-29. [79] Chen Y, Wang T Y, Tian H J, et al. Advances in lithium–sulfur batteries: from academic research to commercial viability[J]. Advance Materials, 2021, 33: 2003666. doi: 10.1002/adma.202003666 [80] Chen R, Zhao T, Wu F. From a historic review to horizons beyond: lithium-sulphur batteries run on the wheels[J]. Chemical Communications, 2015, 51: 18-33. [81] Wang J, Yang J, Xie J, et al. A novel conductive polymer-sulfur composite cathode material for rechargeable lithium batteries[J]. Advanced Materials, 2002, 14(13/14): 963-965. [82] Ji X, Lee K T, Nanar L F. A highly ordered nanostructured carbon-sulphur cathode for lithium-sulphur batteries[J]. Nature Materials, 2009, 8(6): 500-506. [83] Su Y S, Manthiram A. Lithium-sulphur batteries with a microporous carbon paper as a bifunctional interlayer[J]. Nature Communications, 2012, 3: 1166. [84] Jayaprakash N, Shen J, Moganty S S, et al. Porous hollow carbon@sulfur composites for high-power lithium-sulfur batteries[J]. Angewandte Chemie International Edition, 2011, 50(26): 5904-5908. [85] Seh Z W, Li W, Cha J J, et al. Sulphur-TiO2 yolk-shell nanoarchitecture with internal void space for long-cycle lithium-sulphur batteries[J]. Nature Communications, 2013, 4: 1331. [86] Liang X, Garsuch A, Nazar L F. Sulfur cathodes based on conductive MXene nanosheets for high-performance lithium-sulfur batteries[J]. Angewandte Chemie International Edition, 2015, 54(13): 3907-3911. [87] Liang X, Hart C, Pang Q, et al. A highly efficient polysulfide mediator for lithium-sulfur batteries[J]. Nature Communications, 2015, 6: 5682. [88] Liu M, Zhou D, He Y B, et al. Novel gel polymer electrolyte for high-performance lithium-sulfur batteries[J]. Nano Energy, 2016, 22: 278-289. [89] Bai S, Liu X, Zhu K, et al. Metal-organic framework-based separator for lithium-sulfur batteries[J]. Nature Energy, 2016, 1: 16094. [90] Liu Z, Zhou L, Ge Q, et al. Atomic iron catalysis of polysulfide conversion in lithium-sulfur batteries[J]. ACS Applied Materials and Interfaces, 2018, 10(23): 19311-19317. [91] Cha E, Patel M D, Park J, et al. 2D MoS2 as an efficient protective layer for lithium metal anodes in high-performance Li-S batteries[J]. Nature Nanotechnology, 2018, 13(4): 337-344. [92] Xue W, Shi Z, Suo L, et al. Intercalation-conversion hybrid cathodes enabling Li-S full-cell architectures with jointly superior gravimetric and volumetric energy densities[J]. Nature Energy, 2019, 4: 374-382. [93] Zhang J, Shi Y, Ding Y, et al. In situ reactive synthesis of polypyrrole-MnO2 coaxial nanotubes as sulfur hosts for high-performance lithium-sulfur battery[J]. Nano Letters, 2016, 16(11): 7276-7281. doi: 10.1021/acs.nanolett.6b03849 [94] Steatite. The next generation of lithium batteries for marine autonomous systems: lithium sulfur[R]. Redditch: Steatite, 2017. [95] PR Newswire. OXIS Energy set to make solid-state lithium-sulfur cell technology a reality[EB/OL]. [2025-12-11]. https://www.prnewswire.com/news-releases. [96] Liu Y Y, Zhu Y Y, Cui Y. Challenges and opportunities towards fast-charging battery materials[J]. Nature Energy, 2019, 4(7): 540-550. doi: 10.1038/s41560-019-0405-3 [97] 高玉李, 王红秋, 黄格省, 等. 全固态锂电池的产业化和技术研究进展[J]. 化工进展, 2024, 43(9): 4767-78. doi: 10.16085/j.issn.1000-6613.2024-0442Gao Y L, Wang Q H, Huang G S et al. Research progress and the industrialization of all-solid-state battery[J]. Chemical Industry and Engineering Progress, 2024, 43(9): 4767-78. doi: 10.16085/j.issn.1000-6613.2024-0442 [98] Cui, L F, Zhang S, Ju J W, et al. A cathode homogenization strategy for enabling long-cycle-life all-solid-state lithium batteries[J]. Nat Energy, 2024(9): 1084-94. [99] Dai Z S, Sun X, Chen R J, et al. Chemical competing diffusion for practical all-solid-state batteries[J]. Journal of the American Chemical Society, 2024, 146(50): 34517-34527. doi: 10.1021/jacs.4c11645 [100] Orr A. Bluefn-21's search for MH370 nearing completion in the Southern Indian Ocean 2014[EB/OL]. [2025-12-12]. https://www.smh.com.au/national/bluefin21s-search-for-mh370-nearing-completion-in-the-southern-indian-ocean-20140422-3719u.html. [101] Mcewen R S, Hobson B. W, Mcbride L, et al. Docking control system for a 54-cm-diameter(21-in)AUV[J]. IEEE Journal of Oceanic Engineering, 2009, 33(4): 550-562. [102] Allen B, Austin T, Forrester N, et al. Autonomous docking demonstrations with enhanced REMUS technology[C]//Oceans 2006, 2006: 1-6. [103] Fukasawa T, Noguchi T, Kawasaki T, et al. MARINE BIRD, a new experimental AUV with underwater docking and recharging system[C]//Oceans 2003, 2003: 2195-2200. [104] Sato N, Kifume H, Komeda S. A coil layout of wireless power transfer systems based on multi-coil arrangement for underwater vehicles[J]. Electronic Engineering, 2019, 207(2): 38-48. doi: 10.1541/ieejias.139.13 [105] Cai C W, Wu S, Zhang Y Y, et al. Development of a fit-to-surface and lightweight magnetic coupler for autonomous underwater vehicle wireless charging systems[J]. IEEE Transactions on Power Electronics, 2021, 36(9): 9927-40. doi: 10.1109/TPEL.2021.3064411 [106] Lu J, Tang T, Chao B, et al. Reviews of fuel cells and energy storage systems for unmanned undersea vehicles[J]. Energy Sources Part A-recovery Utilization and Environmental Effects, 2024, 46(1): 11867-88. doi: 10.1080/15567036.2020.1795313 [107] Li J, Liang J G, Zhao C J, et al. Molecular simulation study on the permeation performance of modified liners in type-4 hydrogen storage cylinders[J]. International Journal of Hydrogen Energy, 2025, 149: 149999. doi: 10.1016/j.ijhydene.2025.06.189 [108] Green Car Congress. Kawasaki completes world’s first liquefied hydrogen receiving terminal n. d. available[EB/OL]. [2025-12-12]. https://www.greencarcongress.com/2021/01/20210123-kobe.html%0A. [109] Satornino G. Sierra Lobo. UUV power systems[EB/OL]. (2014-04-07)[2025-12-12]. https://www.sierralobo.com/research-technologyluuv-power-system/. [110] Sharma S K, Sidhpuria K B. Jasra R V. Ruthenium containing hydrotalcite as a heterogeneous catalyst for hydrogenation of benzene to cyclohexane[J]. Journal of Molecular Catalysis A: Chemical, 2011, 335(1/2): 65-70. doi: 10.1016/j.molcata.2010.11.015 [111] Song M H, Xie R K, Zhang L T, et al. Combined “Gateway” and “Spillover” effects originated from a CeNi5 alloy catalyst for hydrogen storage of MgH2[J]. International Journal of Minerals, Metallurgy and Materials, 2023, 30(5): 970-976. doi: 10.1007/s12613-022-2529-x [112] Lu C, Panda S, Zhu W, et al. Enhanced hydrogen sorption properties of uniformly dispersed Pd-decorated three-dimensional Mg@Pda architecture[J]. International Journal of Hydrogen Energy, 2024, 50: 979-989. doi: 10.1016/j.ijhydene.2023.08.271 [113] Lototskyy M V, Tolj I, Pickering L, et al. The use of metal hydrides in fuel cell applications[J]. Progress in Natural Science: Materials International, 2017, 27(1): 3-20. doi: 10.1016/j.pnsc.2017.01.008 [114] 谭泽富, 孙荣利, 杨芮, 等. 电池管理系统发展综述[J]. 重庆理工大学学报: 自然科学, 2019, 33(9): 6.Tan Z F, Sun R L, Yang R, et al. Overview of battery management system[J]. Journal of Chongqing University of Technology(Natural Science), 2019, 33(9): 6. [115] 王顺利, 于春梅, 毕效辉, 等. 新能源技术与电源管理[M]. 北京: 机械工业出版社, 2019. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 348
- HTML全文浏览量: 110
- PDF下载量: 134
- 被引次数: 0