Design and simulation of mechanical biomimetic fish tail driven by EAP material
-
摘要: 在海洋保护与探索事业不断推进的背景下, 传统水下驱动装置存在结构复杂、运动效率偏低等固有缺陷, 而柔性材料凭借适配性强、安全性高及灵活性足的优势, 逐渐成为水下驱动领域的研究热点。文中依托电活性聚合物(EAP)能量密度高、机电耦合效率高的核心特性, 结合弹簧的挠曲变形与弹性恢复作用, 模拟鱼体-尾鳍(BCF)推进模式的收缩与放松动态变形过程, 提出一种新型仿生尾鳍的驱动装置, 并实现尾鳍肌肉的连续的顺应性变化。基于流体力学理论, 系统分析尾鳍运动学与推进力之间的耦合作用机制, 构建鱼类鳍条摆动的瞬时力学模型, 并融入实验数据进行求解。利用Fluent软件建立三维数值仿真模型, 通过动网格计算结果与力学模型预测结果的对比分析, 完成模型的有效性验证, 为新型仿生驱动机械鱼的设计开发提供了可靠的理论支撑与实验依据。
-
关键词:
- 仿生鱼尾 /
- 电活性聚合物驱动 /
- Fluent 仿真 /
- 鱼类体-尾鳍推进模式
Abstract: Against the backdrop of advancing marine conservation and exploration, traditional underwater propulsion systems are often hampered by inherent drawbacks such as structural complexity and low motion efficiency. In contrast, flexible materials have emerged as a research focus in underwater actuation due to their superior adaptability, high safety, and remarkable flexibility. Leveraging the favorable core properties of Electroactive Polymer (EAP), namely its high energy density and efficient electromechanical coupling, this study introduces a novel biomimetic caudal fin actuator. This design incorporates a spring element to harness flexural deformation and elastic recovery, effectively simulating the cyclic contraction and relaxation dynamics characteristic of the Body and/or Caudal Fin (BCF) propulsion mode in fish, thereby achieving continuous, compliant changes akin to tail musculature. Based on hydrodynamic theory, the coupled interaction mechanism between fin kinematics and thrust generation is systematically analyzed. An instantaneous mechanical model for fin-ray oscillation is developed and solved by incorporating experimental data. A three-dimensional numerical simulation model is established using Fluent software. The validity of the proposed mechanical model is confirmed through comparative analysis between the computational results from dynamic meshing and the model's predictions. This work provides reliable theoretical support and experimental evidence for the design and development of new biomimetic robotic fish driven by this innovative actuator.-
Key words:
- Bionic fish tail /
- EAPs actuator /
- fluent simulation /
- BCF advancement model.
-

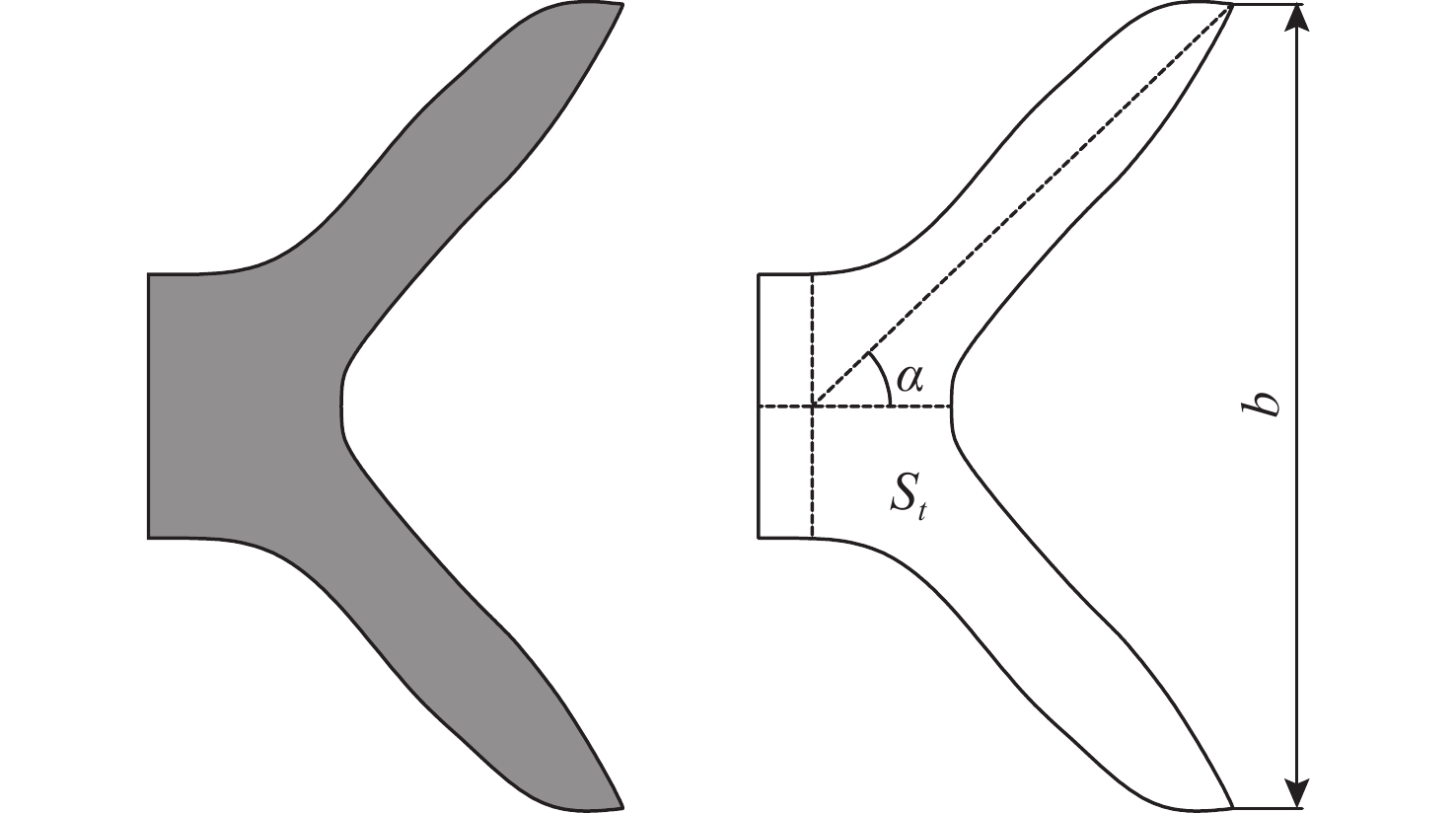
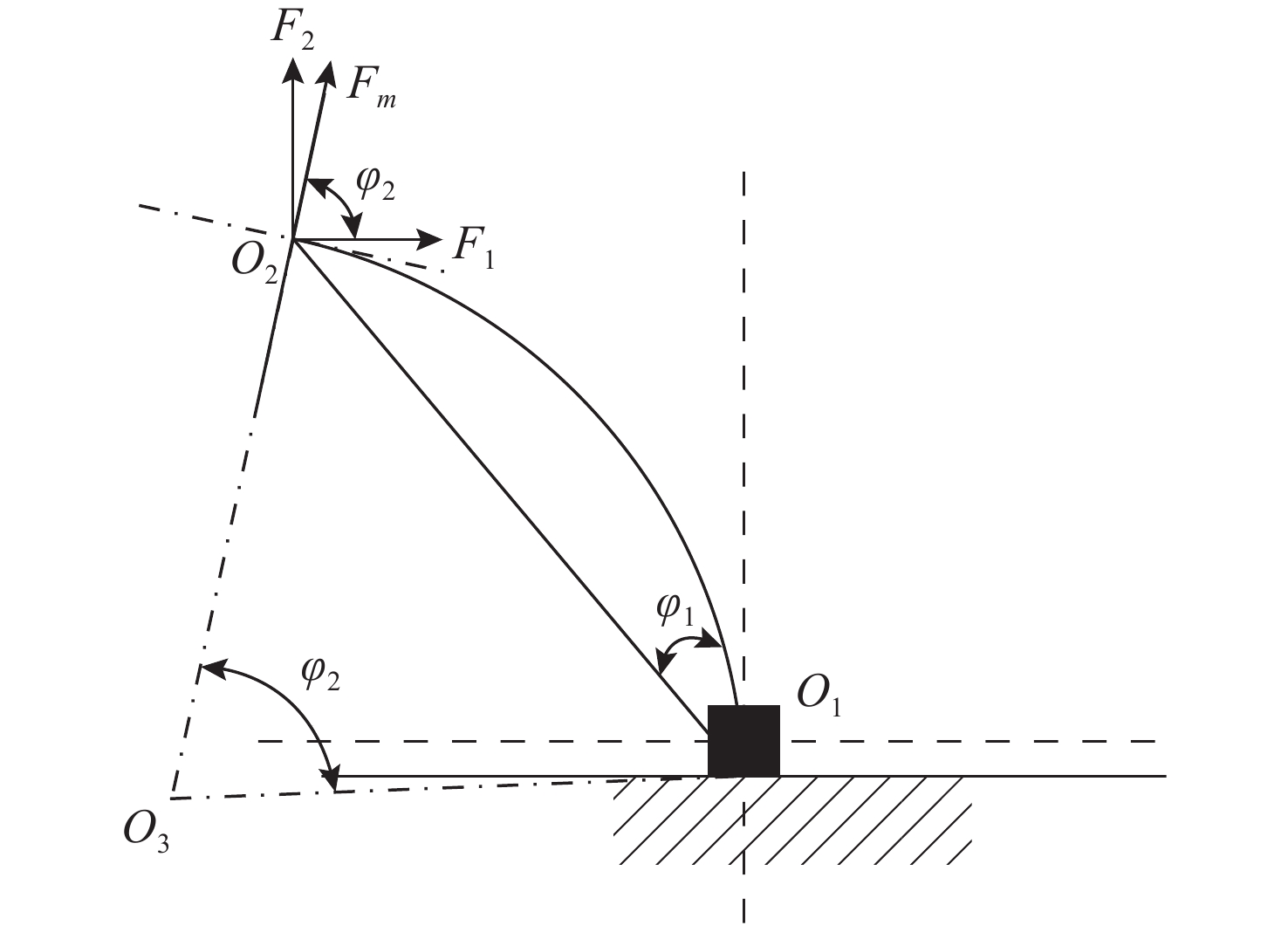
图 9 鱼尾弯曲变形几何结构图
Figure 9. The bending deformation indicates the geometric structure diagram

图 11 不同驱动电压和频率下鱼尾平均推进力
Figure 11. Fishtail average propulsion at different driving voltages and frequencies

图 12 6 kV、3 Hz电压条件下鱼尾CFD仿真推进力曲线
Figure 12. Fishtail CFD simulation of propulsion curve at 6 kV and 3 Hz voltage

图 13 鱼尾单周期内压强云图
Figure 13. Cloud image of pressure changes in the fish tail over a period
表 1 弹簧规格参数
Table 1. Spring specification parameter
弹簧型号 线径/mm 外径/mm 长度/mm 型号1 1 12 120 型号2 1.2 22 120 型号3 1.5 22 150 型号4 1.8 22 180  下载: 导出CSV
下载: 导出CSV
表 2 4种不同弹簧型号下平均值
Table 2. Average values of springs under different processes for four models
弹簧型号 驱动力/N 弯曲角度/° 击穿电压/kV 型号1 0.38 44 6.5 型号2 0.44 30 6.5 型号3 0.66 36 6.5 型号4 0.76 40 6.0
下载: 导出CSV
表 3 EAP致动器的性能测试及功能检测
Table 3. Performance test and function test of EAP actuator
弯曲方向 左侧通电/V 右侧通电/V 角度/(°) 应力/N 左 0 1 42° 0.82 右 1 0 43° 0.83
下载: 导出CSV
-
[1] Wang R Q, Zhang C, Zhang Y W, et al. Fast-swimming soft robotic fish actuated by bionic muscle[J]. Soft robotics, 2024, 11(5): 845-856. doi: 10.1089/soro.2023.0163 [2] 包海默, 侯舒荣, 宋梅萍, 等. 水下机器人仿生胸鳍设计研究进展[J]. 机械设计, 2023, 40(12): 139-148. doi: 10.13841/j.cnki.jxsj.2023.12.026Bao H M, Hou S R, Song M P, et al. Research progress of bionic pectoral fin design for underwater robots[J]. Mechanical Design, 2023, 40(12): 139-148. doi: 10.13841/j.cnki.jxsj.2023.12.026 [3] 王勇. 介电弹性体柔性仿生机器鱼的设计[D]. 哈尔滨: 哈尔滨工业大学, 2020. 9-34 [4] Coltelli M A, Catterlin J, Scherer A , et al. Simulations of 3D-Printable Biomimetic Artificial Muscles Based on Microfluidic Micro-capacitors for Exoskeletal Actuation and Stealthy Underwater Propulsion [J]. Sensors and Actuators A: Physical, 2021, 112700. [5] Nguyen Q S, Heo S, Park H C, et al. Performance evaluation of an improved fish robot actuated by piezoceramic actuators[J]. Smart Materials and Structures, 2010, 19(3): 1-8. doi: 10.1088/0964-1726/19/3/035030 [6] 刘世琦. 压电双尾鳍式微型机器鱼动力学分析研究[D]. 北京: 北方工业大学, 2021. 17-49. [7] 高飞. SMA驱动仿生机器鱼的尾鳍和喷射推进性能及其实验研究[D] 哈尔滨工业大学, 2015. 19-81 [8] 夏期荣, 董二宝, 杨杰. 基于SMA柔性致动器的机器鱼设计与试验[J]. 新技术新工艺, 2018(08): 17-21.Xia Qirong, Dong Erbao, Yang Jie. Design and test of robot fish based on SMA flexible actuator[J]. New Technology and New Process, 2018(08): 17-21. [9] Li T F, Li G R, Liang Y M, et al. Fast-moving soft electronic fish [J]. Science Advances, 2017, 3(4): No. e1602045. [10] Shintake J, Cacucciolo V, Shea H, et al. Soft biomimetic fish robot made of dielectric elastomer actuators[J]. Soft robotics, 2018, 5(4): 466-474. doi: 10.1089/soro.2017.0062 [11] 李梦梦, 李原, 王庆林. EAP柔性智能驱动材料的建模、控制及应用研究进展[J]. 机器人, 2018, 40(5): 660-672. doi: 10.13973/j.cnki.robot.180210Li M M, Li Y, Wang Q L. Research progress on modeling, control and application of EAP flexible intelligent driving materials[J]. Robot, 2018, 40(5): 660-672. doi: 10.13973/j.cnki.robot.180210 [12] 孙伟, 柳素娉, 吴罡, 等. 鱼类游动机理研究进展[J]. 大连海洋大学学报, 1-14.Sun W, Liu S P, Wu G, et al. Research progress of fish swimming mechanism [J]. Journal of Dalian Ocean University, 1-14. [13] 李晓锋, 梁松苗, 李艳芳, 等. 仿生材料电活性聚合物“人工肌肉”的研究进展[J]. 高分子通报, 2008(08): 134-145. doi: 10.14028/j.cnki.1003-3726.2008.08.007Li X F, Liang S M, Li Y F, et al. Research progress of biomimetic materials -electroactive polymers as "artificial muscles"[J]. Polymer Bulletin, 2008(08): 134-145. doi: 10.14028/j.cnki.1003-3726.2008.08.007 [14] 胡瑞南, 梅杰, 程正树, 等. 尾鳍摆动驱动仿生机器鱼的水动力性能仿真分析[J]. 武汉科技大学学报, 2020, 43(06): 463-470.Hu R N, Mei J, Cheng Z S, et al. Simulation and analysis of hydrodynamic performance of bionic robotic fish driven by swinging tail fin[J]. Journal of Wuhan University of Science and Technology, 2020, 43(06): 463-470. [15] 冯亿坤. 尾鳍与胸鳍联合推进的仿生鱼自主游动数值模拟研究[D]. 哈尔滨: 哈尔滨工程大学, 2021. 2, 147-161. [16] 包海默, 胡晓惠, 宋梅萍, 等. 尾鳍驱动型水下机器人发展综述[J]. 包装工程, 2023, 44(18): 128-146. doi: 10.19554/j.cnki.1001-3563.2023.18.016Bao H M, Hu X H, Song M P, et al. Review on development of caudal-fin-driven underwater vehicle[J]. Packaging Engineering, 2023, 44(18): 128-146. doi: 10.19554/j.cnki.1001-3563.2023.18.016 [17] 王安忆, 刘贵杰, 王新宝, 等. 身体/尾鳍推进模式仿生机器鱼研究的进展与分析[J]. 机械工程学报, 2016, 52(17): 137-146. doi: 10.3901/JME.2016.17.137Wang A Y, Liu G J, Wang X B, et al. Progress and analysis of bionic robotic fish with body/tail propulsion Model[J]. Chinese Journal of Mechanical Engineering, 2016, 52(17): 137-146. doi: 10.3901/JME.2016.17.137 [18] 崔祚, 姜洪州, 刘圣陶. 柔性机器鱼的动力学建模及其游动性能分析[J]. 科学技术与工程, 2020, 20(36): 14994-14999.Cui Z, Jiang H Z, Liu S T. Dynamic modeling and swimming performance analysis of flexible robotic fish [J]. Science Technology and Engineering, 2019, 20(36): 14994-14999. [19] 李健. 仿生乌贼推进器及其流体动力仿真和实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2011.71-72. [20] 崔祚, 姜洪洲, 何景峰, 等. BCF仿生鱼游动机理的研究进展及关键技术分析[J]. 机械工程学报, 2015, 51(16): 177-184. doi: 10.3901/JME.2015.16.177Cui Z, Jiang H Z, He J F, et al. Research progress and key technology analysis of BCF bionic fish propulsion mechanism[J]. Journal of Mechanical Engineering, 2015, 51(16): 177-184. doi: 10.3901/JME.2015.16.177 [21] Fang D H , Zhang J S , Huang Z W . Modal analysis on mechanism of bionic fish swimming by dynamic mode decomposition [J]. Ocean Engineering, 2023, 273: 113897. -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 178
- HTML全文浏览量: 125
- PDF下载量: 120
- 被引次数: 0