Anti-Disturbance Control for Underwater Propulsion Motor at Low Speed Based on Hybrid Resolver and High-Frequency Injection Observation
-
摘要: 无人水下航行器推进系统的低速控制性能是其有效执行深海勘探、军事侦察等关键任务的前提条件。针对低速工况控制能力提升的需求, 本文系统分析了永磁同步电机驱动系统中有位置传感器方案与无位置传感器方案的局限性。旋转变压器在恶劣环境下易引入位置检测误差, 而在主流无感控制方案中, 基于反电动势的观测器存在零低速域观测盲区, 高频信号注入法虽可提升低速观测性能, 但其辨识精度易受电机参数变化影响, 且所有无感控制方案的精度均高度依赖电流采样的准确性, 使得该类方案在干扰严重的复杂工况下, 面临严峻的工程挑战。为此, 本文提出一种旋转变压器与高频方波注入相结合的混合观测低速抗扰控制策略, 通过硬件冗余与信息融合技术, 将旋变提供的绝对位置基准与高频方波注入的动态观测结果进行深度融合, 构建优势互补的观测架构, 提升系统在低速、变载及信号受扰等复杂工况下的鲁棒性。仿真结果表明所提出的方法能够有效抑制位置传感器和电流传感器的检测误差干扰, 实现转子位置的稳定精确观测, 为水下装备动力系统提供了高可靠性的控制解决方案。Abstract: The low-speed control performance constitutes a fundamental prerequisite for unmanned underwater vehicle propulsion systems to execute critical missions such as deep-sea exploration and military reconnaissance effectively. To address the need for enhanced control capabilities during low-speed operations, this paper systematically examines limitations in permanent magnet synchronous motor drive systems employing both position-sensor-based schemes and sensorless schemes. Resolvers introduce position detection errors under harsh environmental conditions, while among dominant sensorless solutions, back-electromotive-force observers contain inherent observation dead zones near zero speed. Although high-frequency signal injection methods improve low-speed observation performance, their estimation accuracy remains susceptible to motor parameter variations. Crucially, the accuracy of all sensorless schemes exhibits critical dependence on current sampling precision, making such approaches vulnerable to severe engineering challenges in complex interference-intensive operating conditions. To resolve these issues, this paper proposes a hybrid observation-based low-speed anti-disturbance control strategy that integrates resolver technology with high-frequency square-wave injection. By applying hardware redundancy and information fusion techniques, the methodology achieves comprehensive integration between the absolute position reference provided by resolvers and dynamic observations generated through high-frequency square-wave injection. This synthesis establishes an advantage-complementary observation architecture that significantly enhances system robustness in difficult scenarios: low-speed operations, variable loading conditions, and signal interference contexts. Simulation results verify the capability of the method to suppress detection error interference arising from position sensors and current sensors concurrently, enabling stable and precise rotor position estimation. The framework therefore delivers a high-reliability control solution for underwater equipment propulsion systems.
-
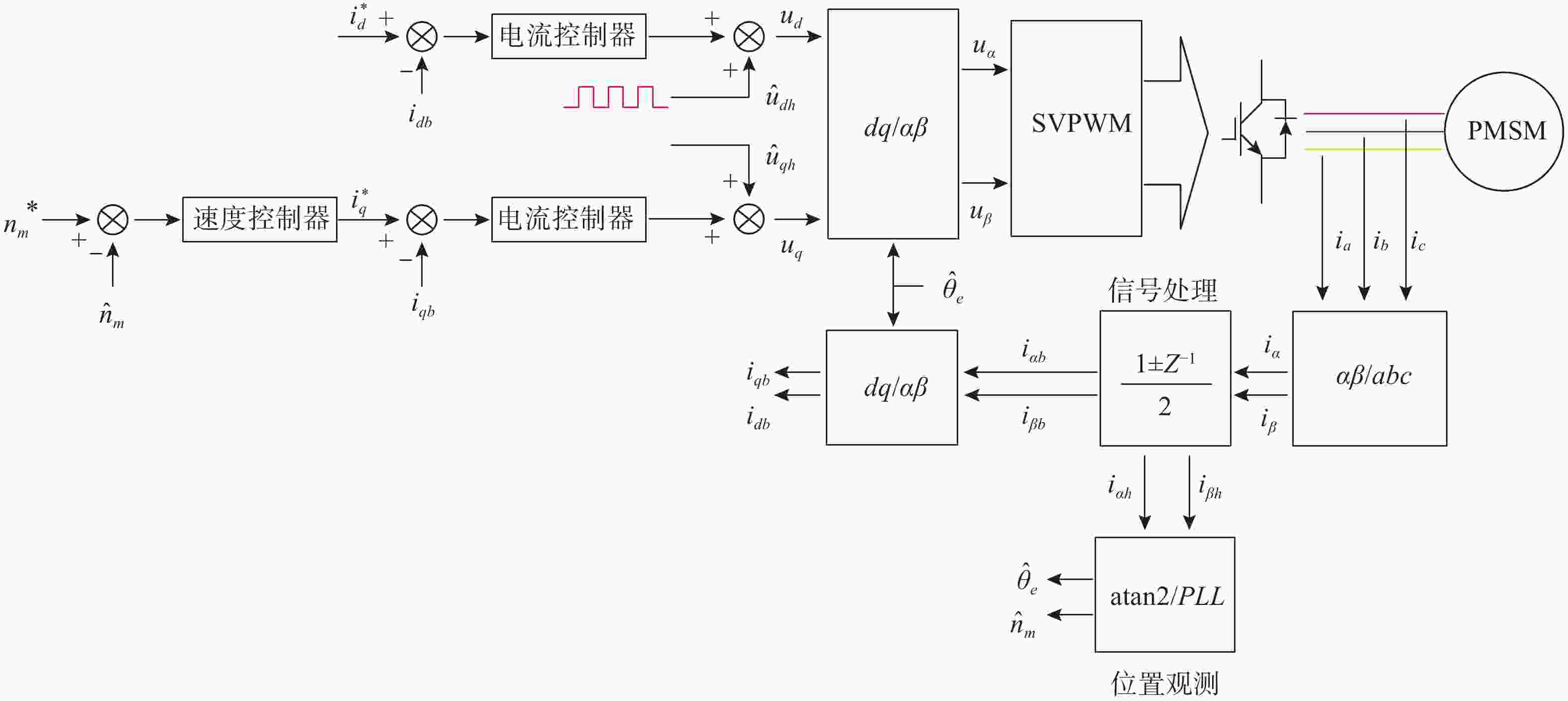
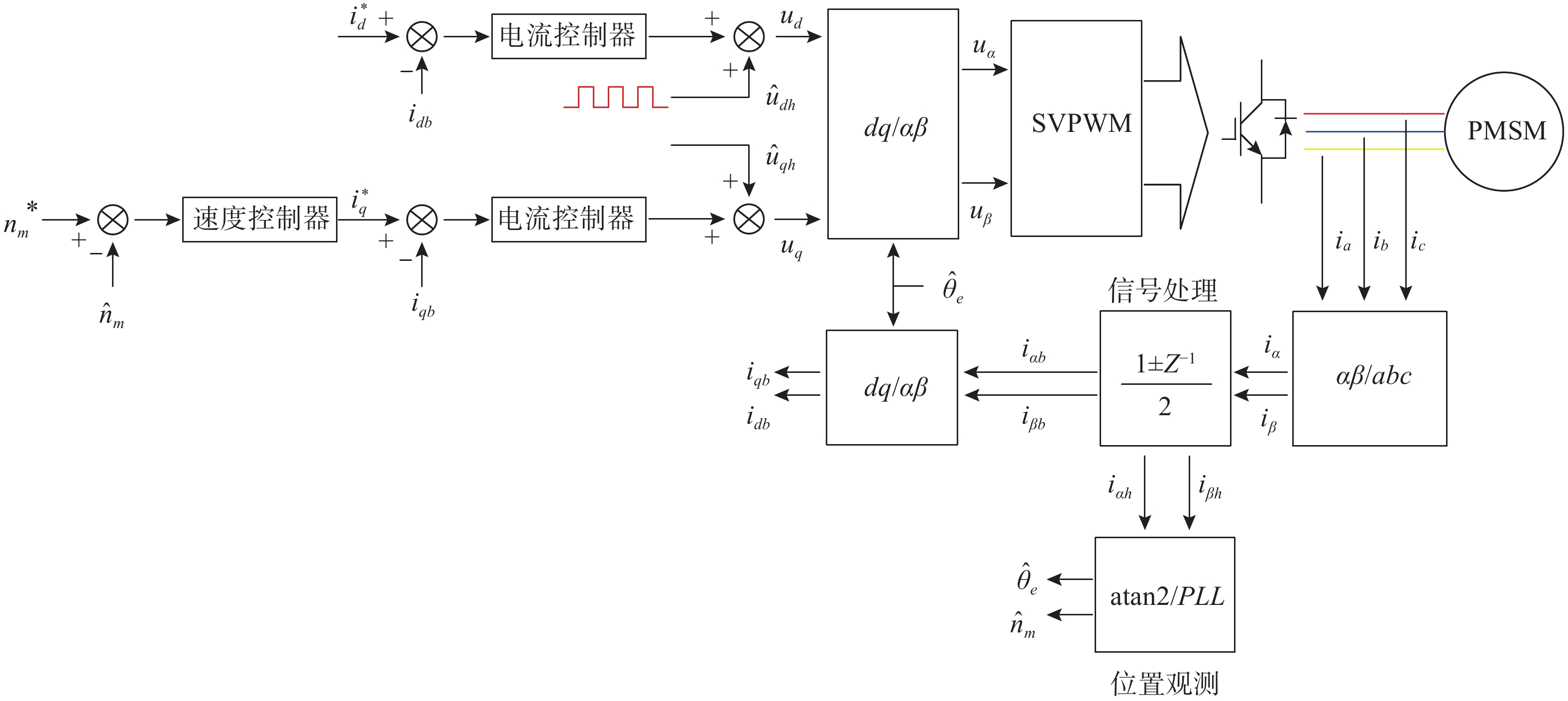
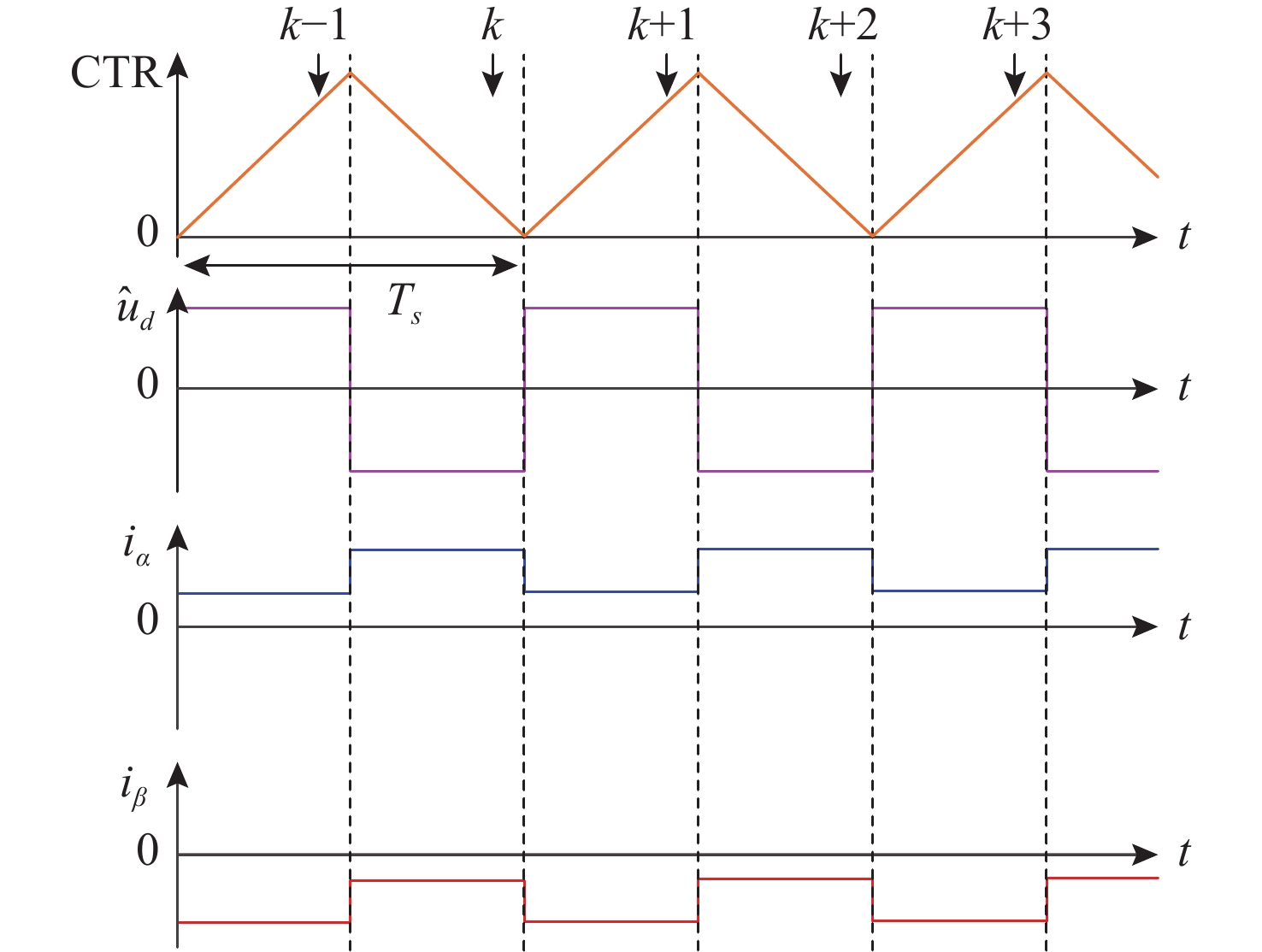
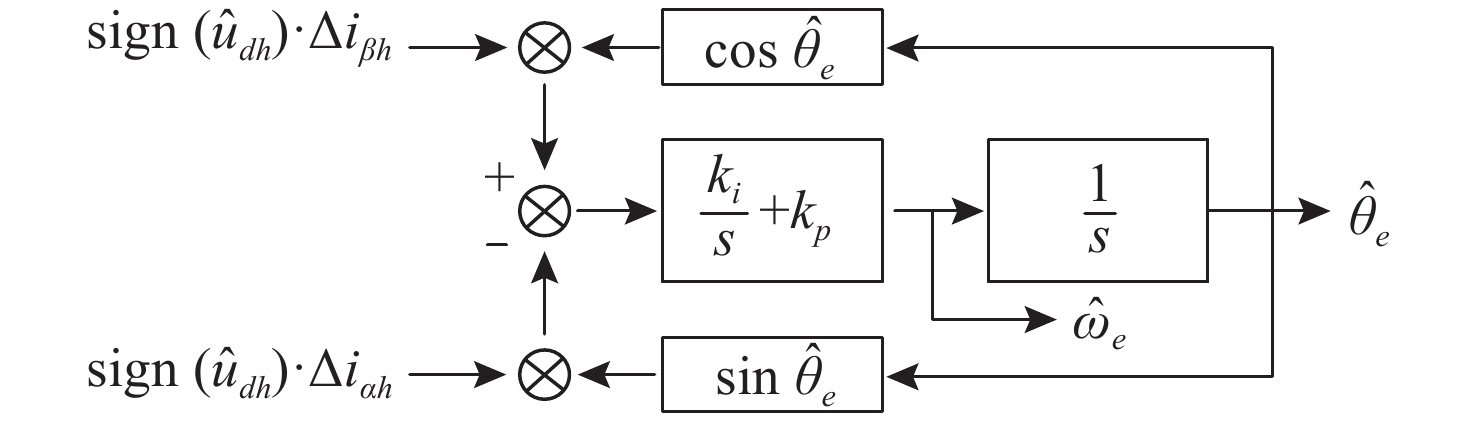
图 1 基于高频方波注入的无感驱动系统框图
Figure 1. Diagram of a sensorless drive system based on high-frequency square-wave injection
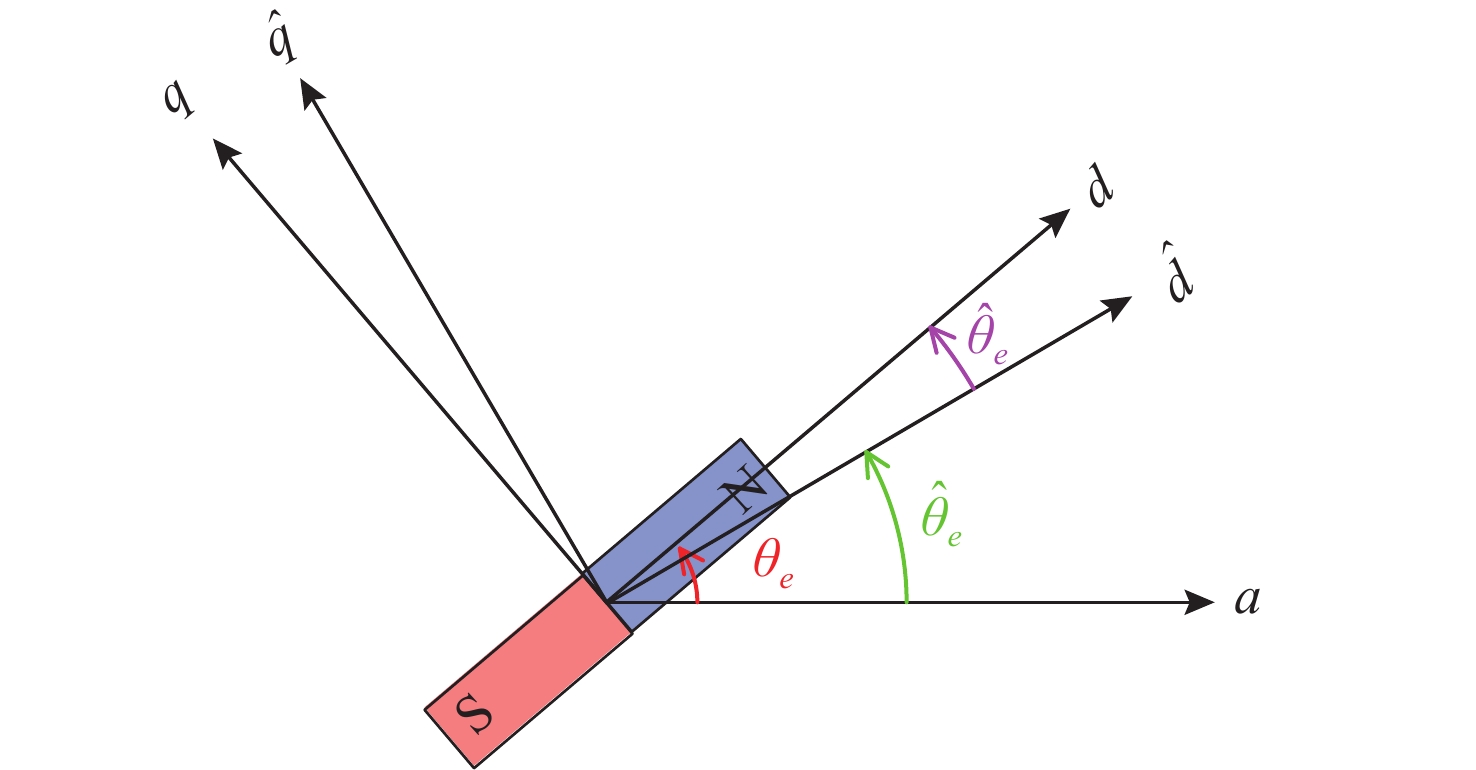
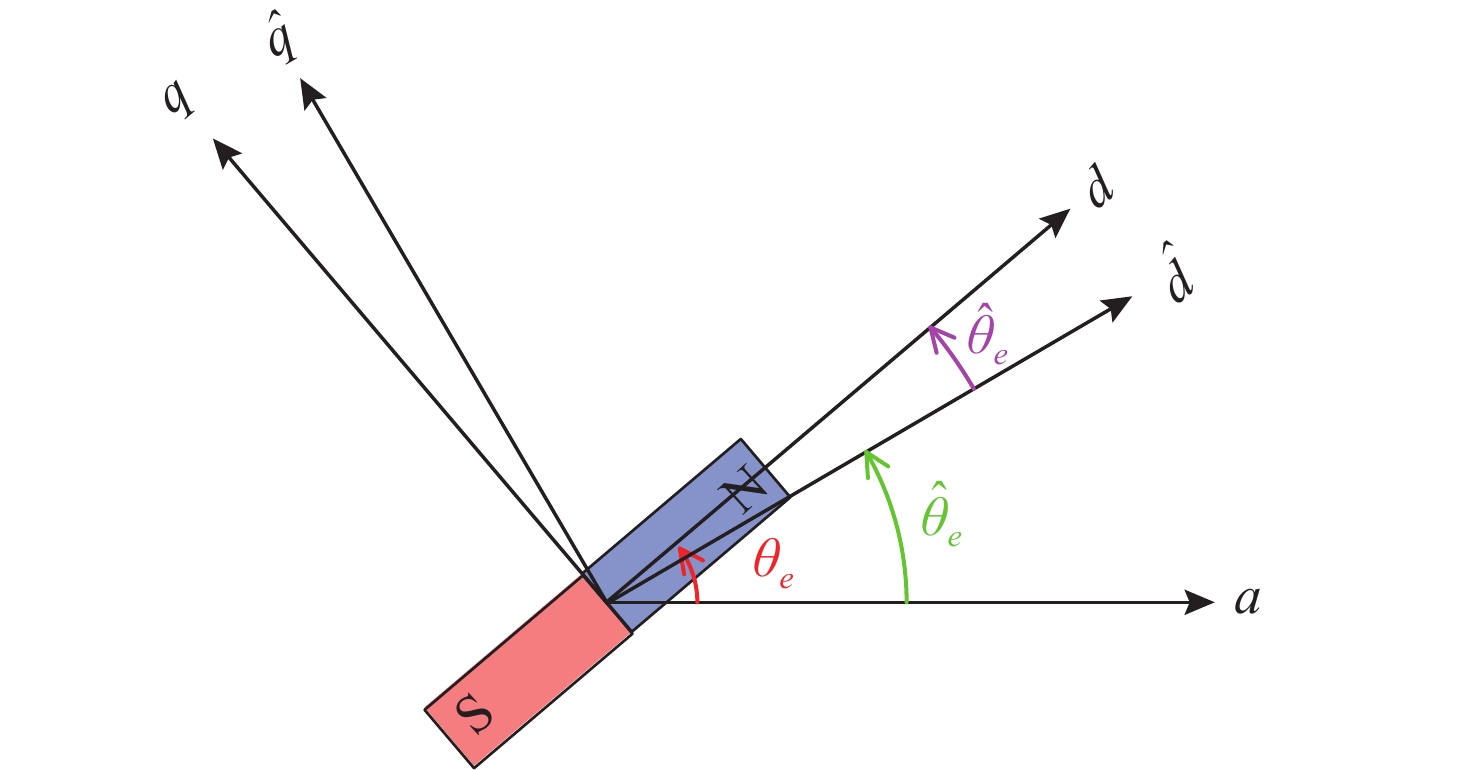
图 2 估计、实际双相旋转坐标系分布图
Figure 2. Estimated and actual two-phase rotating axis distribution diagram
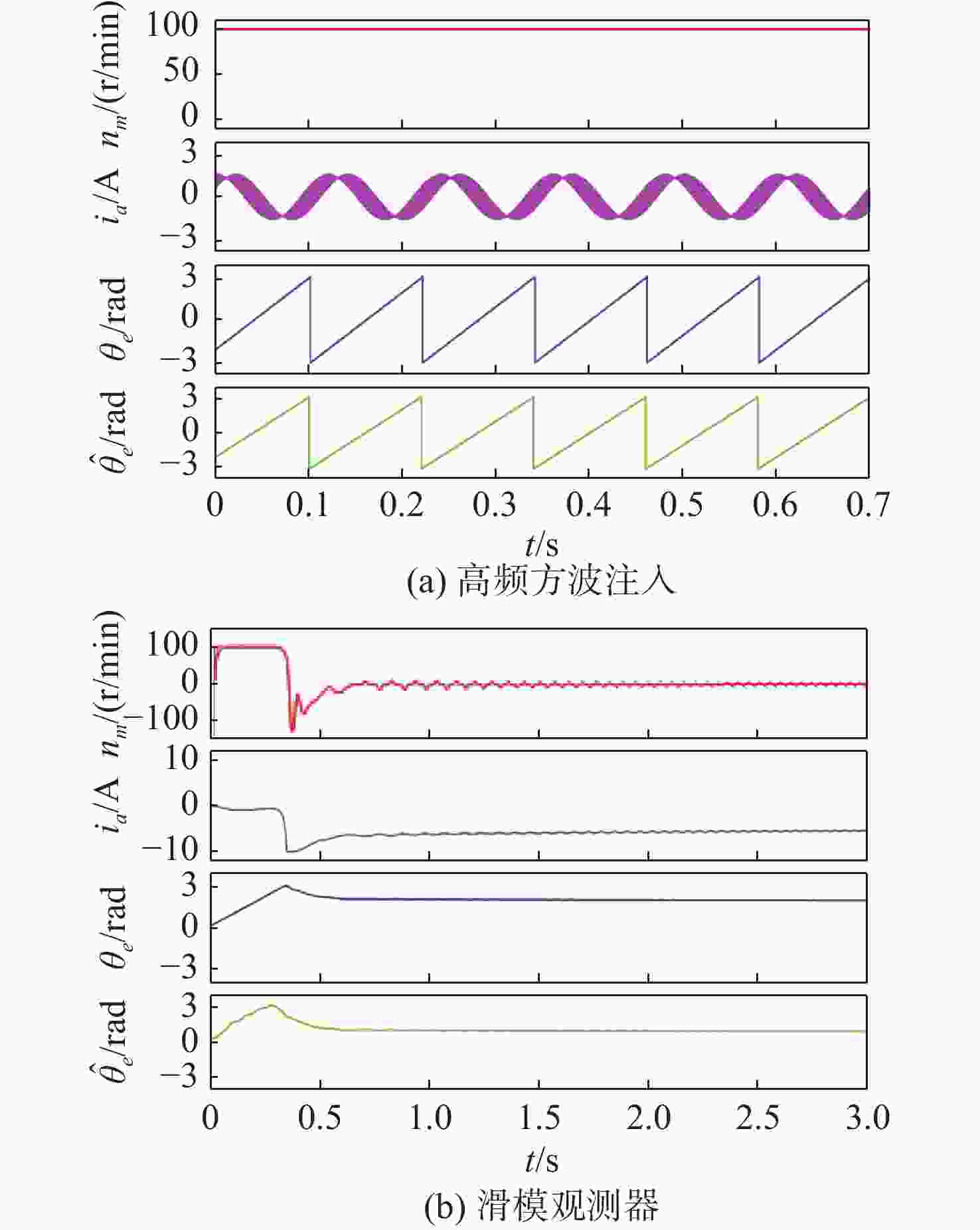
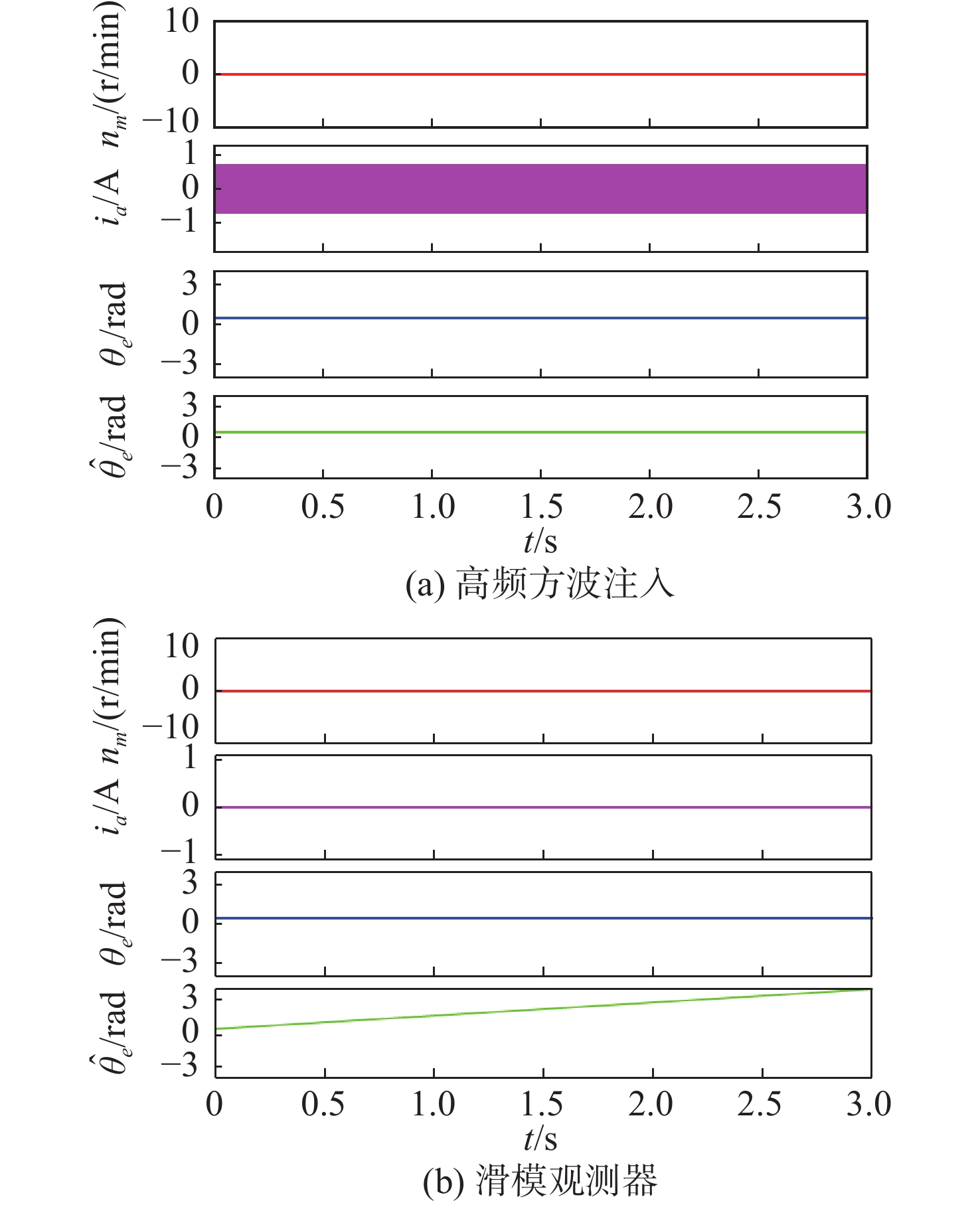
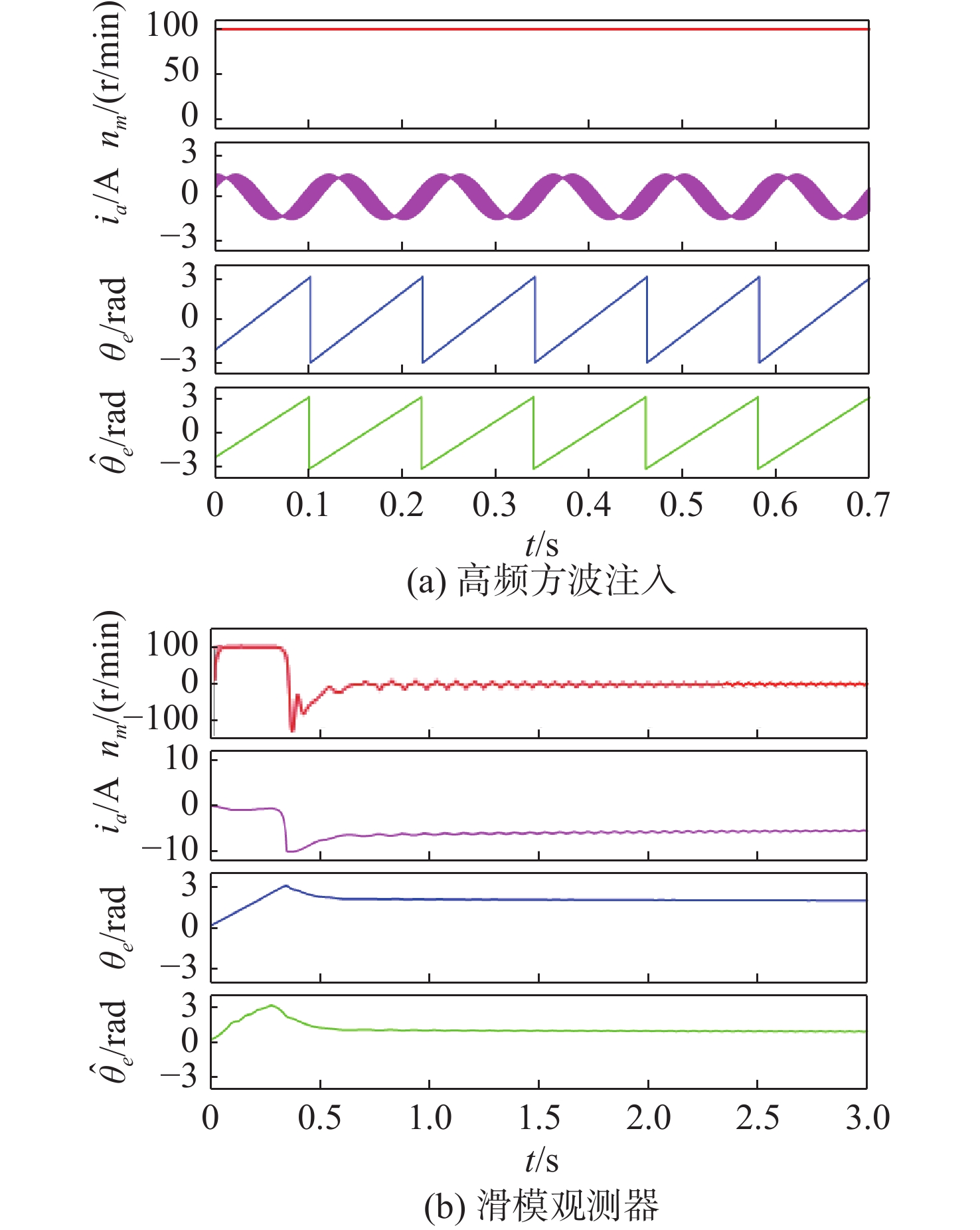
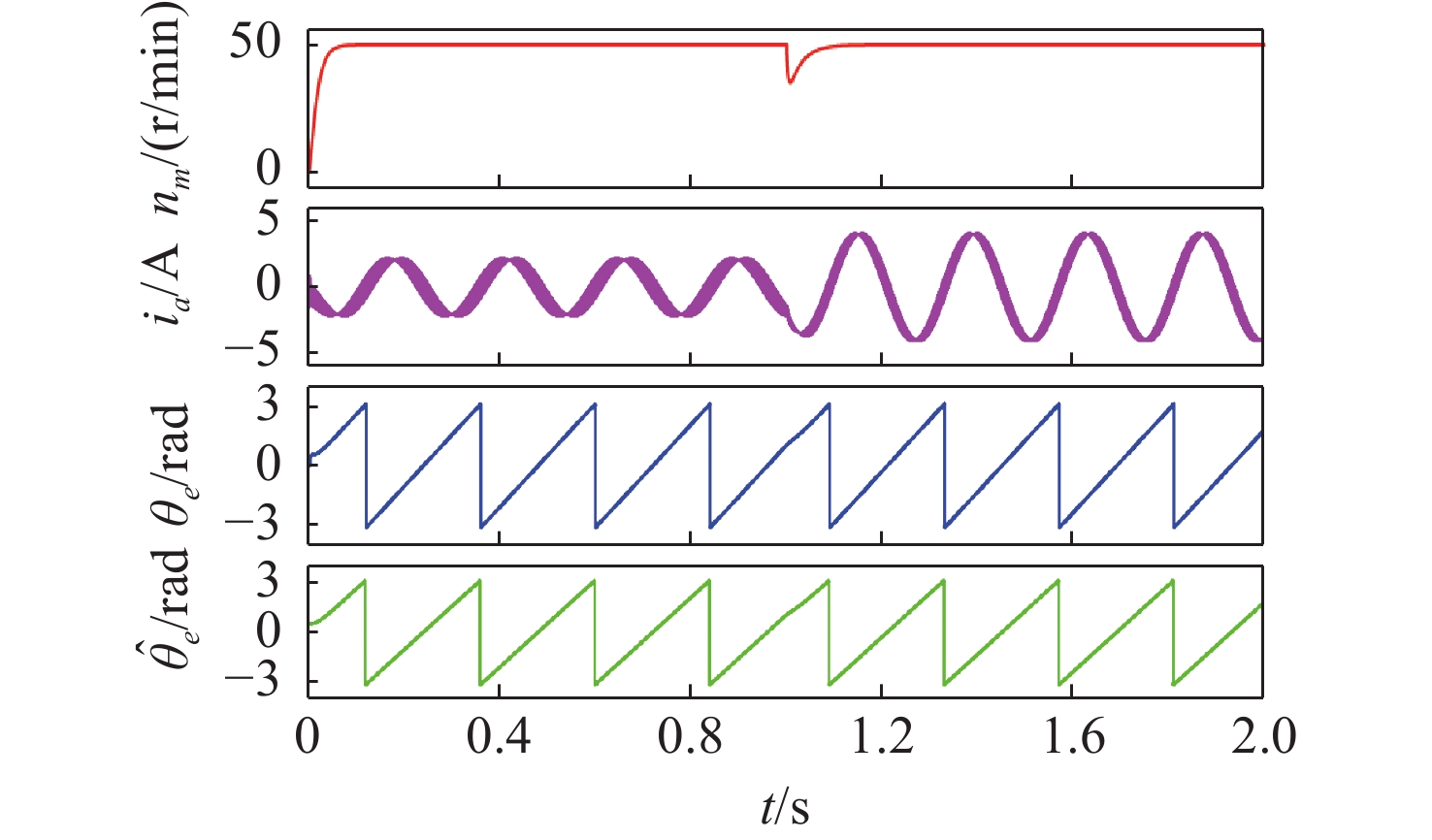
图 9 定转速工况观测性能对比
Figure 9. Comparative observation performance at constant-speed condition
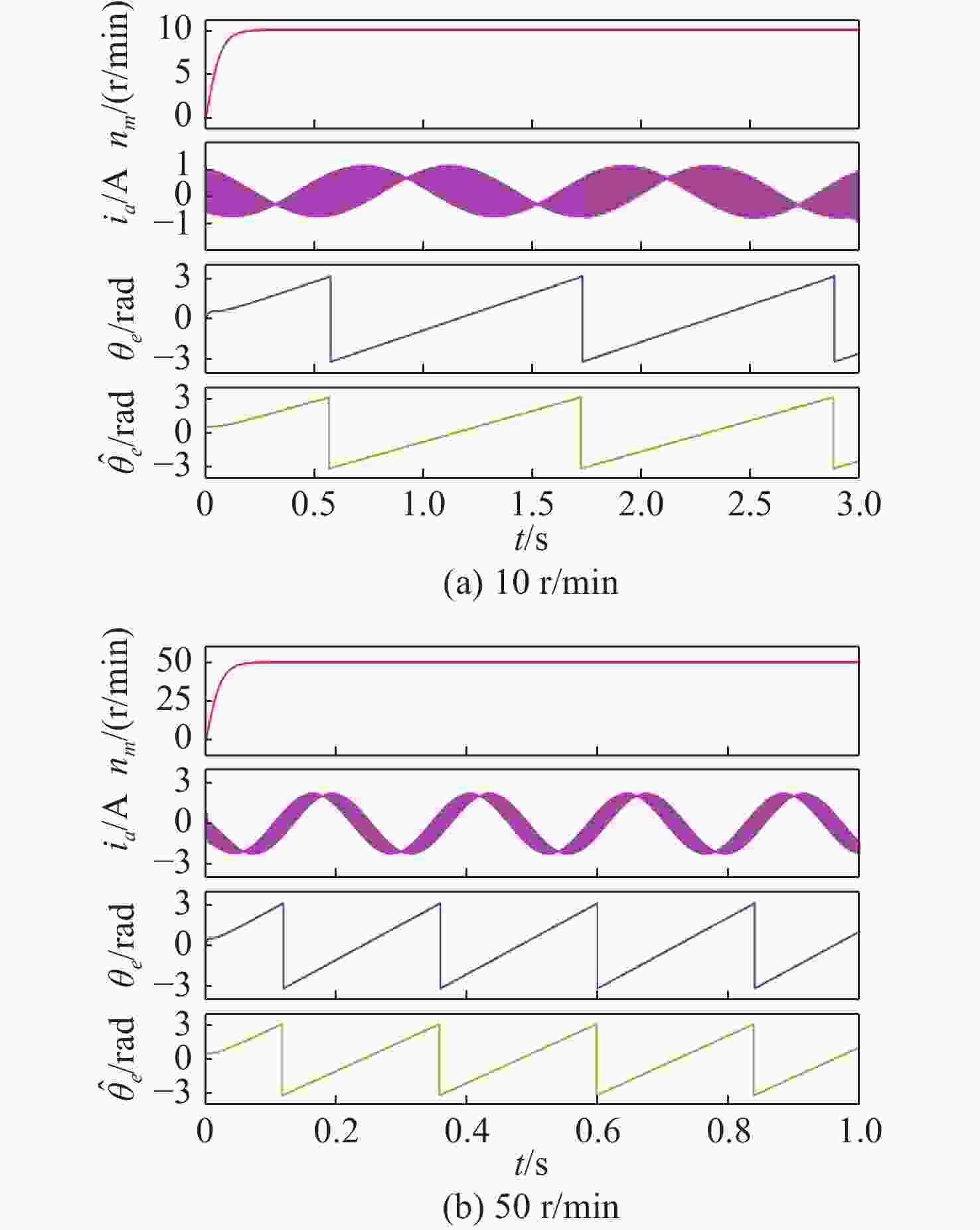
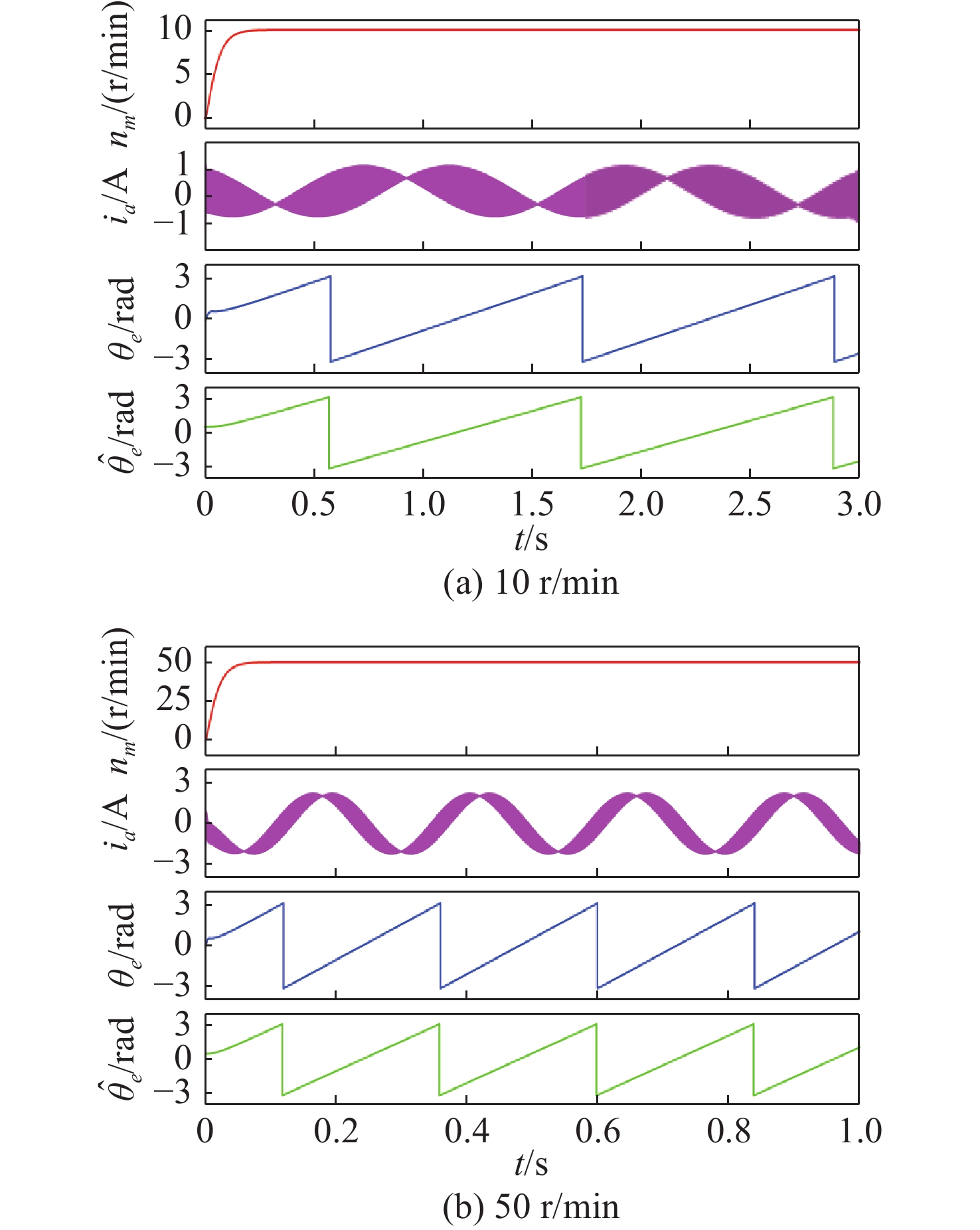
图 10 高频方波注入定转速观测性能
Figure 10. Observation performance of high-frequency square-wave injection under constant-speed conditions
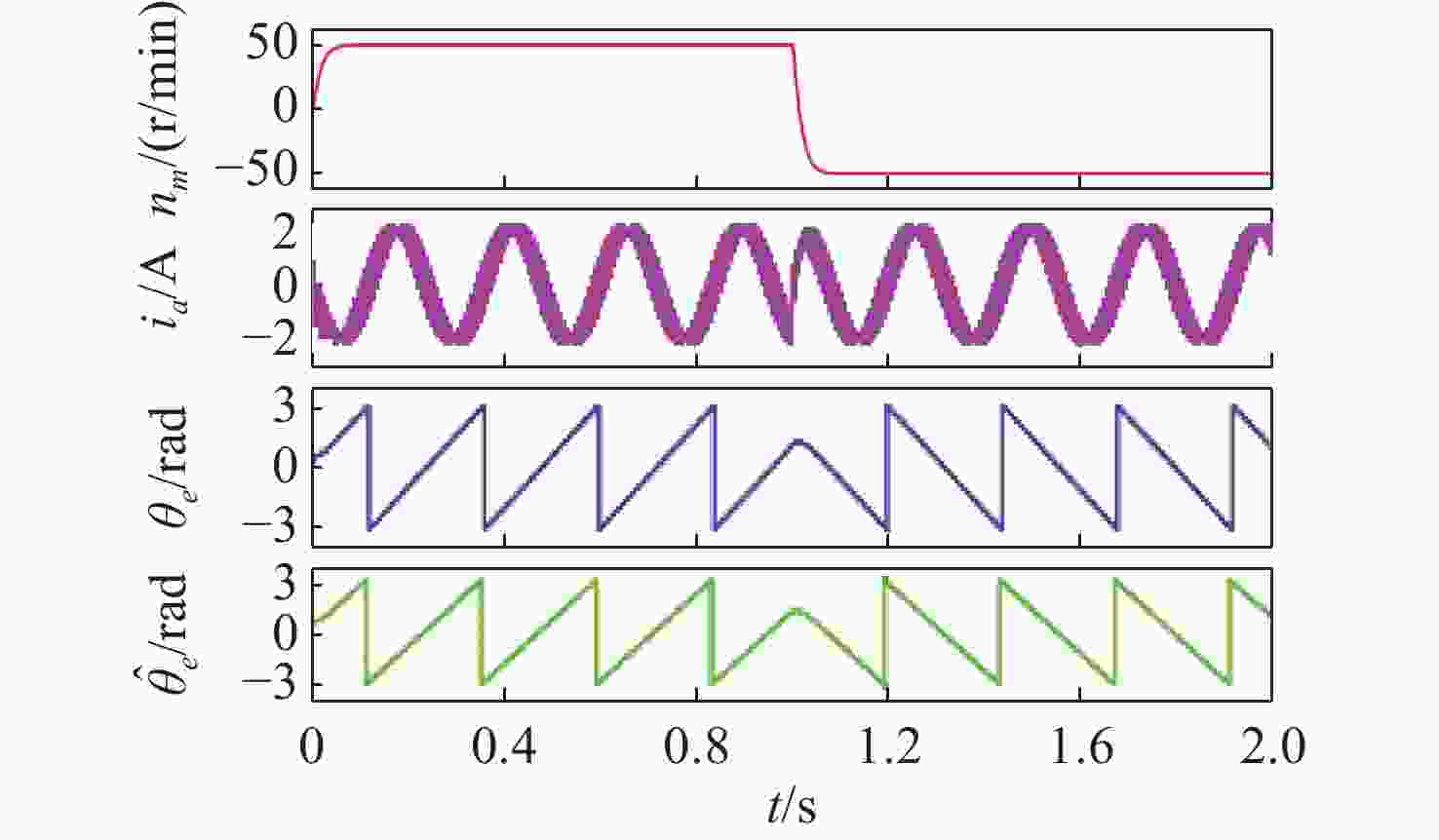
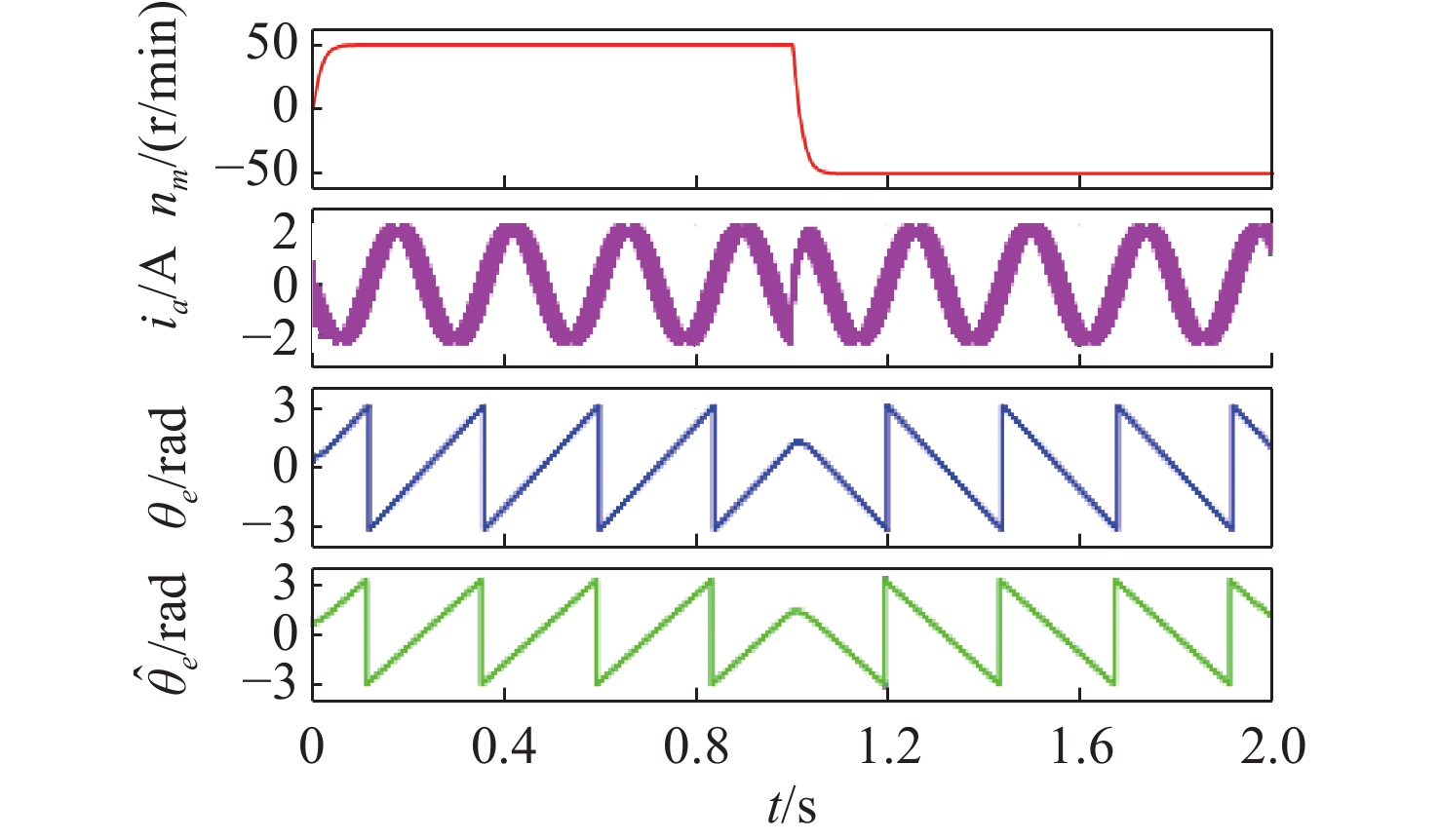
图 11 高频方波注入变转速观测性能
Figure 11. Observation performance of high-frequency square-wave injection under variable-speed condition
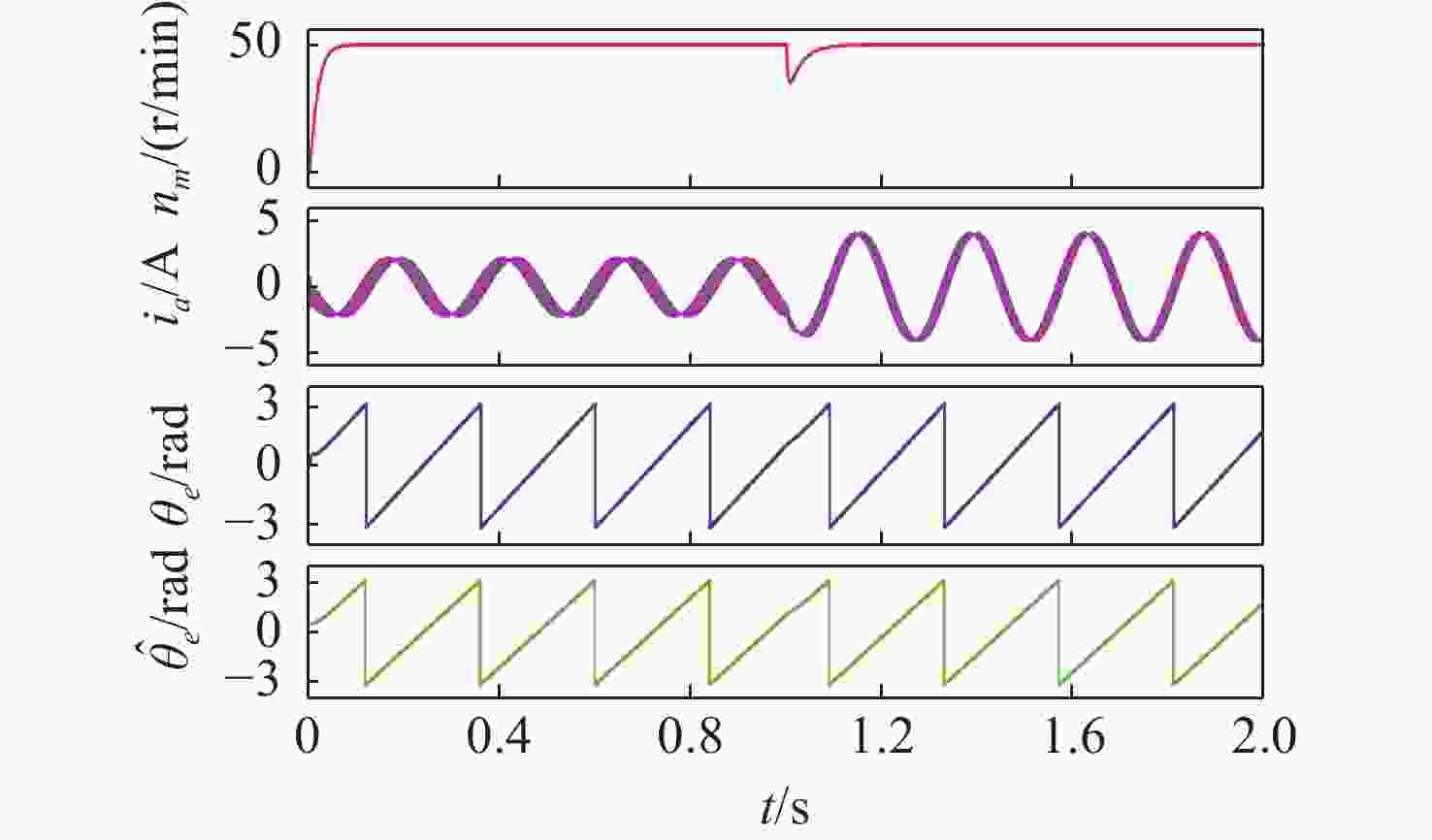
图 12 高频方波注入变负载观测性能
Figure 12. Observation performance of high-frequency square-wave injection under variable-load condition
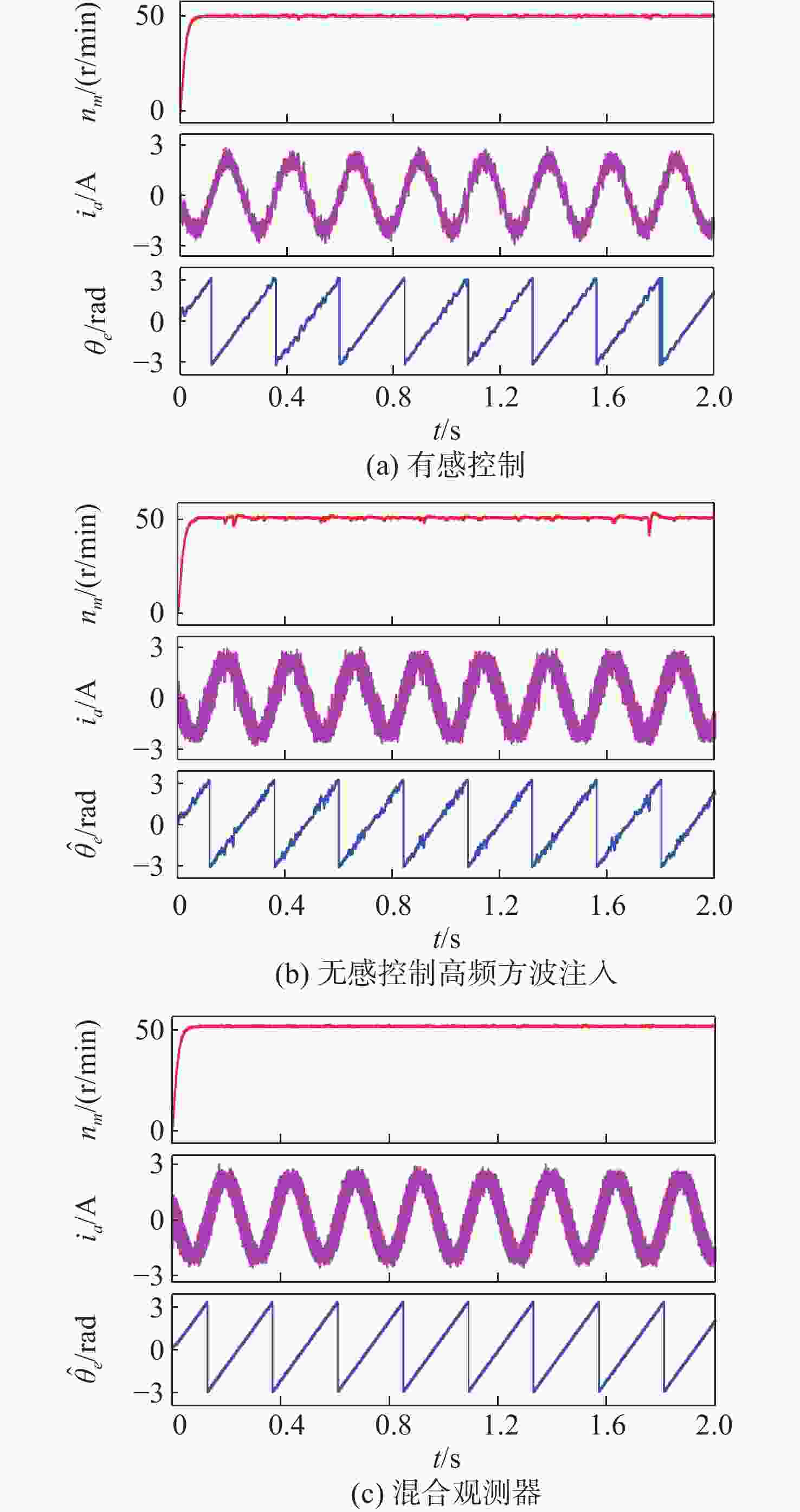
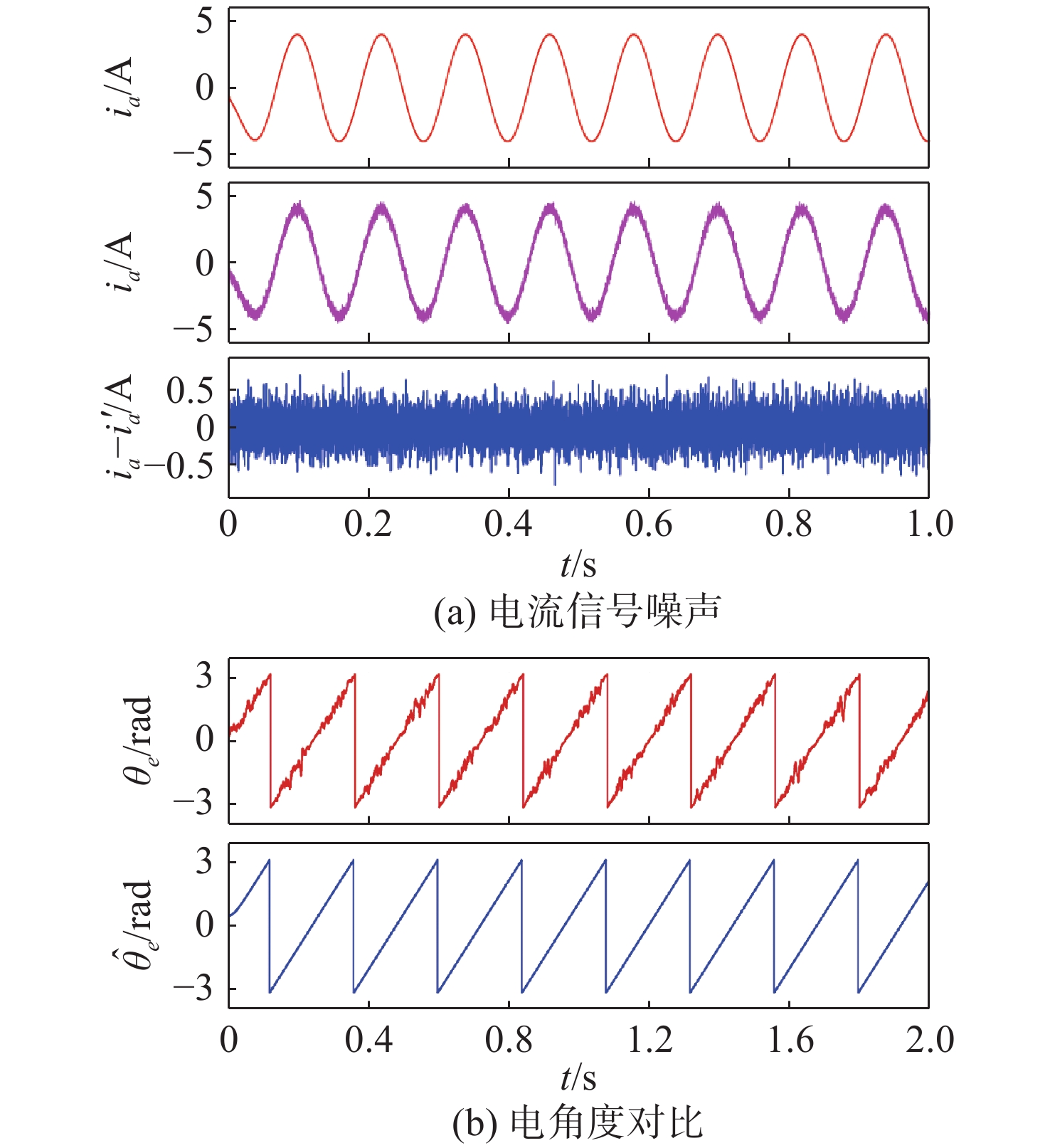
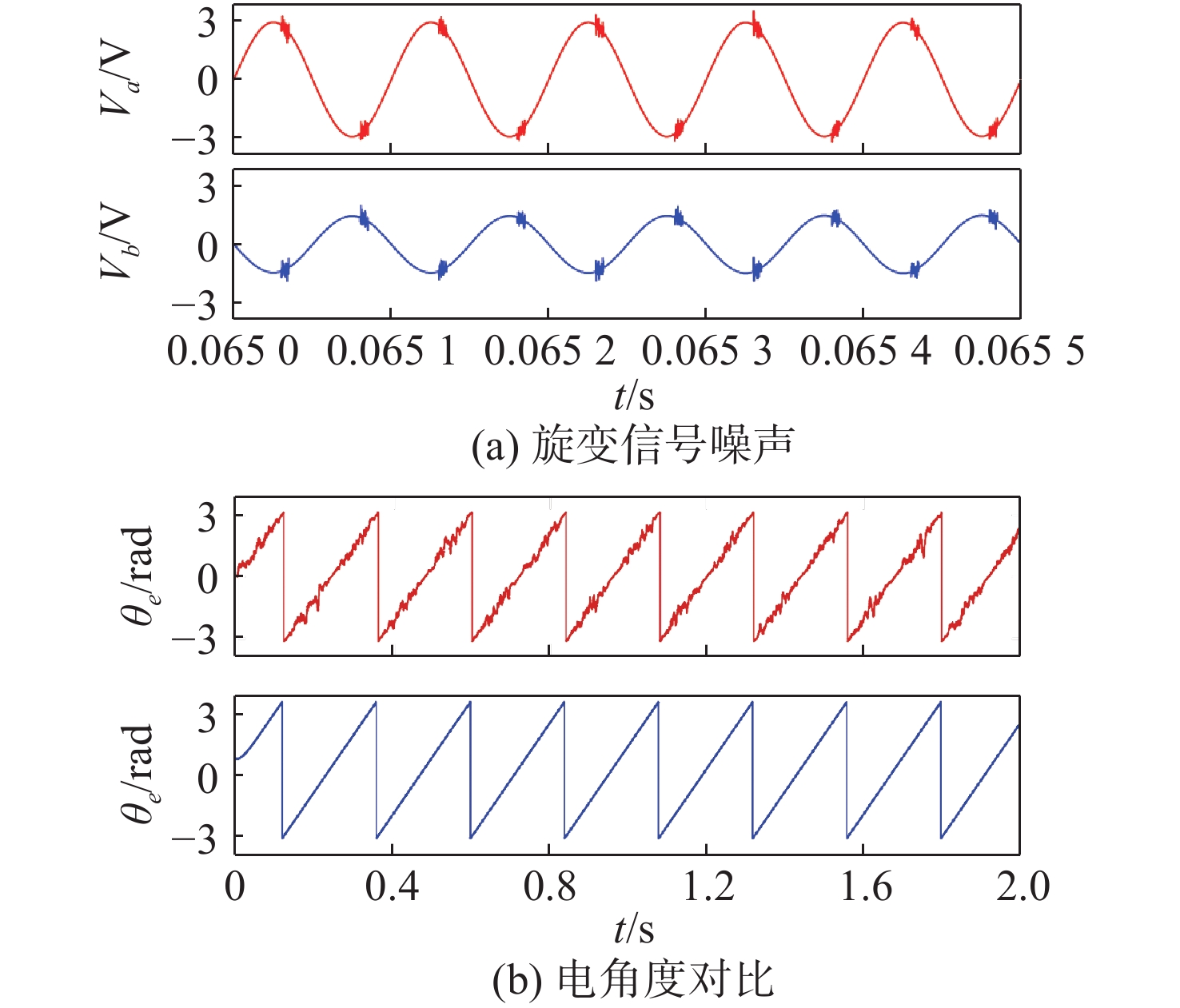
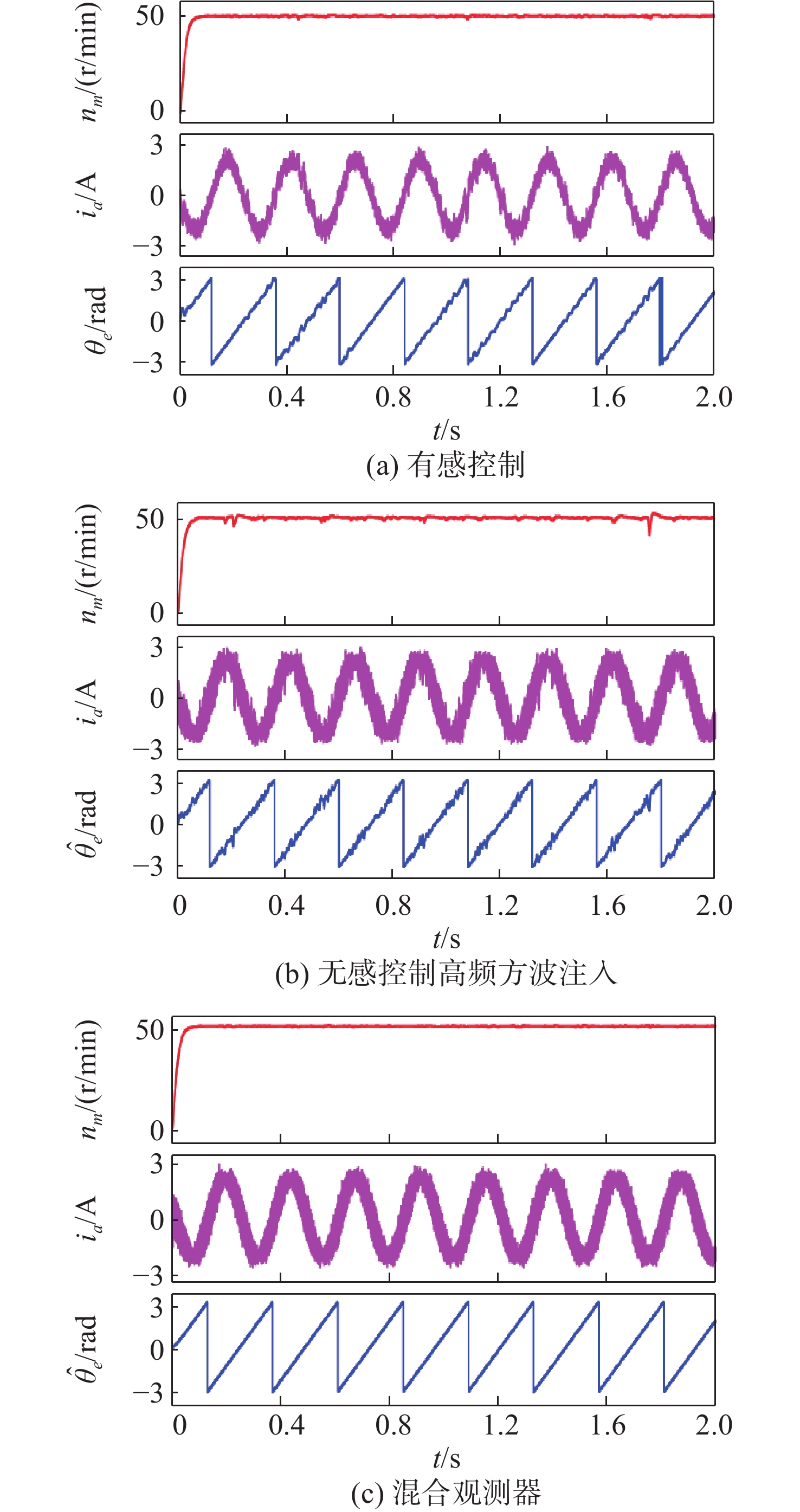
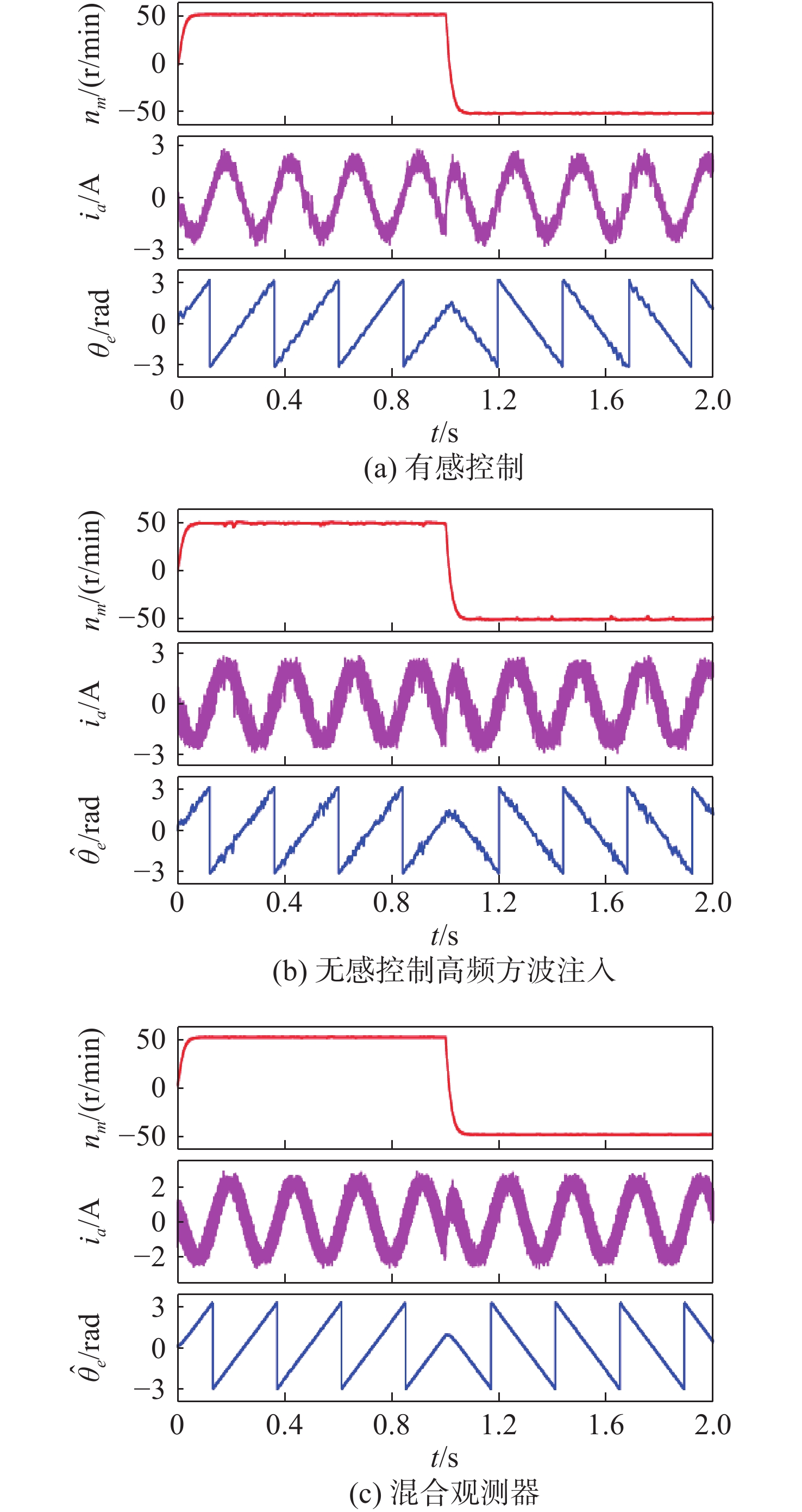
图 15 位置、电流信号受干扰时的定转速工况性能对比
Figure 15. Performance comparison under constant-speed operation with interfered position and current signals
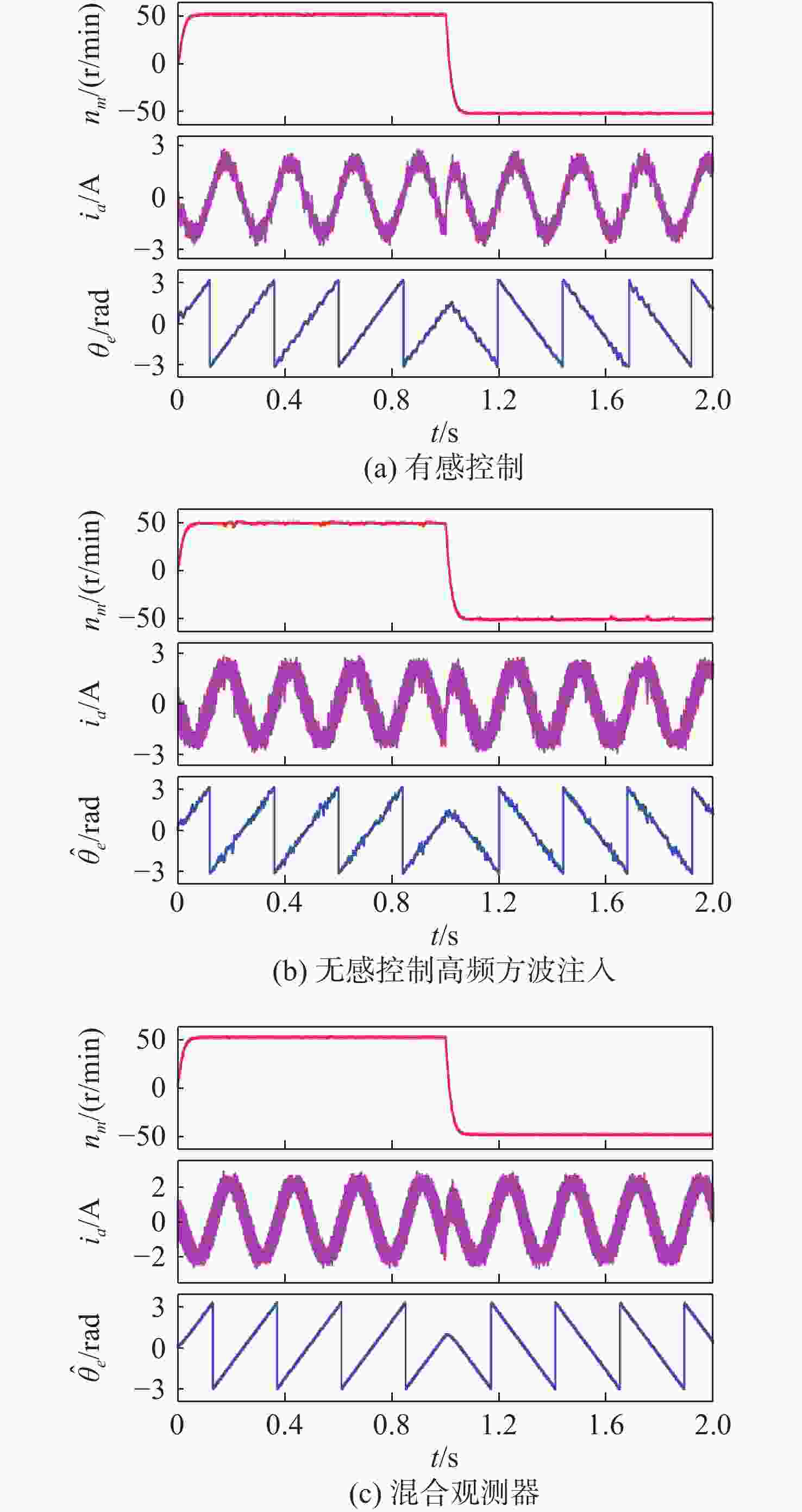
图 16 位置、电流信号受干扰时的变转速工况性能对比
Figure 16. Performance comparison under variable-speed operation with interfered position and current signals
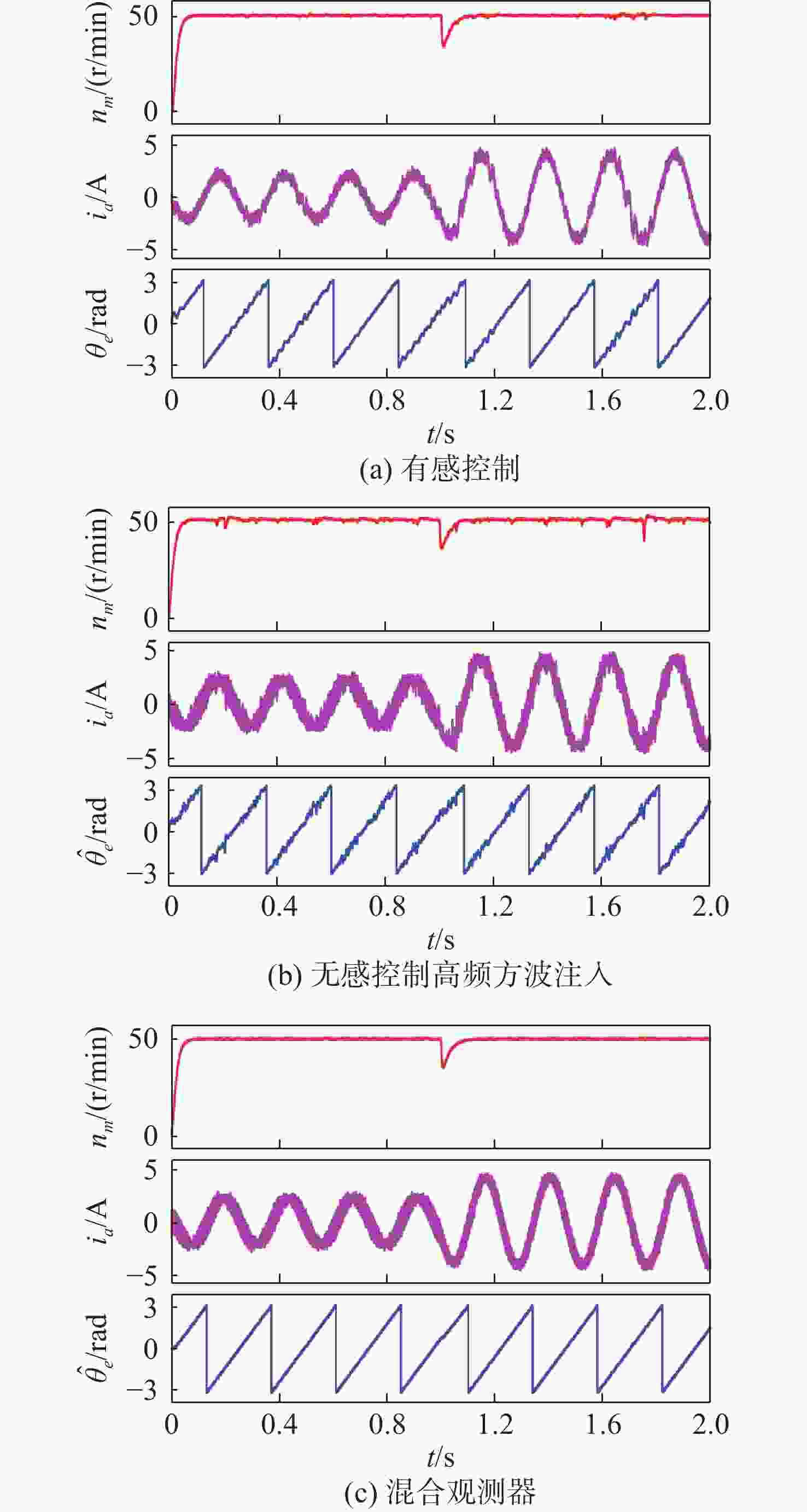
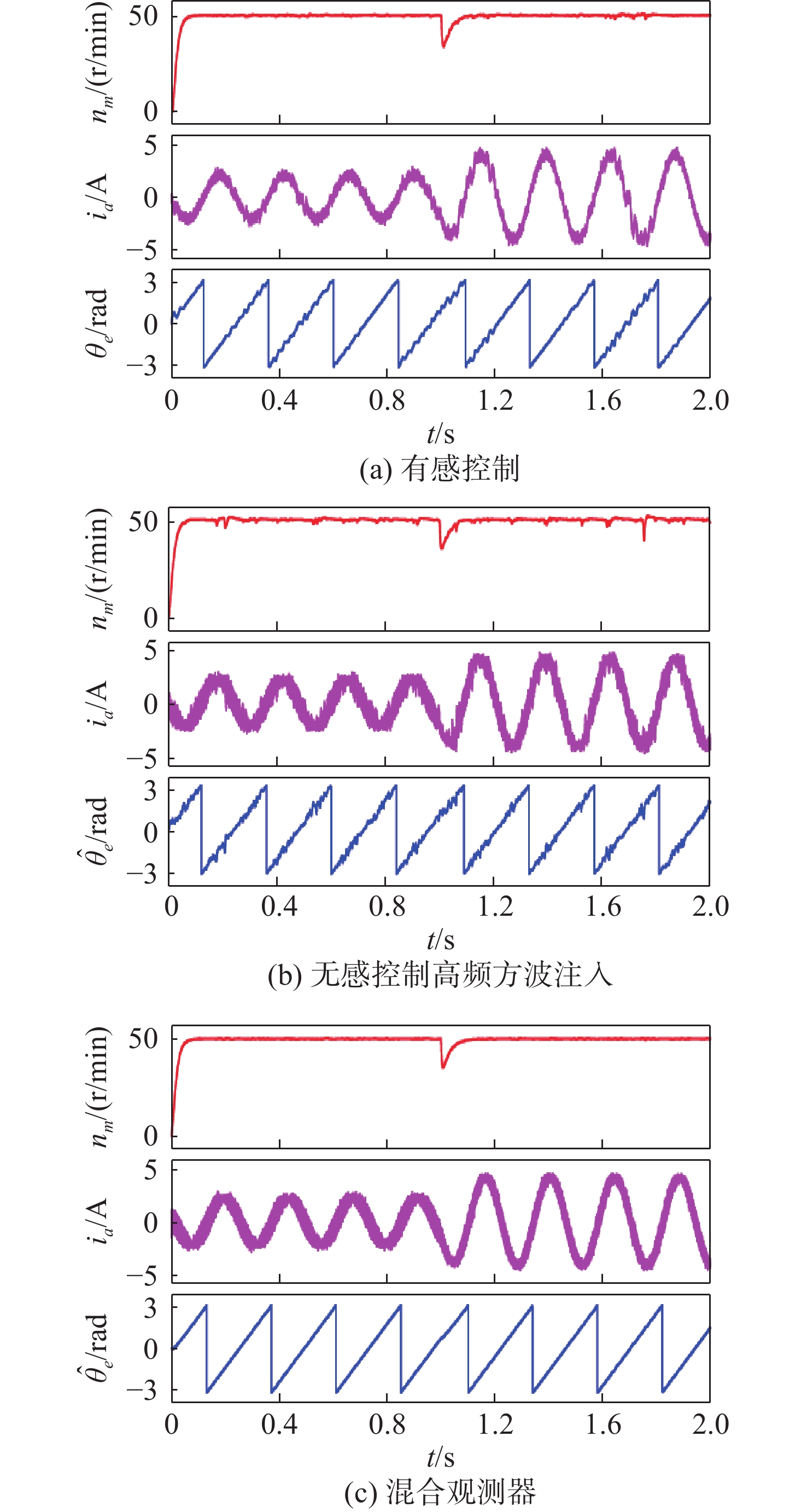
图 17 位置、电流信号受干扰时的变负载工况性能对比
Figure 17. Performance comparison under variable-load operation with interfered position and current signals
表 1 PMSM参数
Table 1. Parameters of permanent magnet synchronous motor
参数 数值 磁链/Wb 0.010 9 定子电阻/Ω 0.176 3 定子交轴电感/mH 0.205 定子直轴电感/mH 0.18 极对数 5 额定转速/(r/min) 1 600 额定电流/A 10 转动惯量/(kg·m2) 0.000 28 粘滞系数 0.01  下载: 导出CSV
下载: 导出CSV
-
[1] Hasan K, Ahmad S, Liaf A F, et al. Oceanic challenges to technological solutions: A review of autonomous underwater vehicle path technologies in biomimicry, control, navigation, and sensing[J]. IEEE Access, 2024(12): 46202-46231. doi: 10.1109/access.2024.3380458 [2] Neira J, Sequeiros C, Huamani R, et al. Review on unmanned underwater robotics, structure designs, materials, sensors, actuators, and navigation control[J]. Journal of Robotics, 2021(1): 5542920. [3] Zhang J, Xiang X, Li W. Advances in marine intelligent electromagnetic detection system, technology, and applications: A review[J]. IEEE Sensors Journal, 2023, 23(5): 4312-4326. doi: 10.1109/JSEN.2021.3129286 [4] 史小锋, 党建军, 梁跃, 等. 水下攻防武器能源动力技术发展现状及趋势[J]. 水下无人系统学报, 2021, 29(6): 634-647. doi: 10.11993/j.issn.2096-3920.2021.06.001Shi X F, Dang J J, Liang Y, et al. Development status and trend of energy and power technology for underwater attack and defensive weapon[J]. Journal of Undersea Unmanned Systems, 2021, 29(6): 634-647. doi: 10.11993/j.issn.2096-3920.2021.06.001 [5] Wang J, Wu Z, Dong H, et al. Development and control of underwater gliding robots: A review[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(9): 1543-1560. doi: 10.1109/JAS.2022.105671 [6] Sun Y, Chai P, Zhang G, et al. Sliding mode motion control for AUV with dual-observer considering thruster uncertainty[J]. Journal of Marine Science and Engineering, 2022, 10(3): 349. doi: 10.3390/jmse10030349 [7] KhajueeZadeh M S, Emadaleslami M, Tootoonchian F, et al. Comprehensive investigation of the resolver’s eccentricity effect on the field-oriented control of PMSM[J]. IEEE Sensors Journal, 2023, 23(17): 19145-19152. doi: 10.1109/JSEN.2023.3292896 [8] Hwang S H, Kim H J, Kim J M, et al. Compensation of amplitude imbalance and imperfect quadrature in resolver signals for PMSM drives[J]. IEEE Transactions on Industry Applications, 2011, 47(1): 134-143. doi: 10.1109/TIA.2010.2091477 [9] Lara J, Xu J, Chandra A. A novel algorithm based on polynomial approximations for an efficient error compensation of magnetic analog encoders in PMSMs for EVs[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3377-3388. doi: 10.1109/TIE.2016.2524409 [10] Lara J, Xu J, Chandra A. Effects of rotor position error in the performance of field-oriented-controlled PMSM drives for electric vehicle traction applications[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 4738-4751. doi: 10.1109/tie.2016.2549983 [11] Noori N, Khaburi D A. Diagnosis and compensation of amplitude imbalance, imperfect quadrant and offset in resolver signals[C]//Proceedings of the 7th Power Electronics, Drive Systems & Technologies Conference (PEDSTC). Tehran, Iran, 2016: 76-81. [12] Sul S, Kwon Y, Lee Y. Sensorless control of IPMSM for last 10 years and next 5 years[J]. CES Transactions on Electrical Machines and Systems, 2017, 1(2): 91-99. doi: 10.23919/tems.2017.7961290 [13] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88. doi: 10.19595/j.cnki.1000-6753.tces.160741Liu J L, Xiao F, Shen Y, et al. Position-sensorless control technology of permanent-magnet synchronous motor—A review[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88. doi: 10.19595/j.cnki.1000-6753.tces.160741 [14] Reigosa D D, Briz F, Blanco C, et al. Sensorless control of doubly fed induction generators based on stator high-frequency signal injection[J]. IEEE Transactions on Industry Applications, 2014, 50(5): 3382-3391. doi: 10.1109/TIA.2014.2303255 [15] Wang G, Yang L, Zhang G, et al. Comparative investigation of pseudorandom high-frequency signal injection schemes for sensorless IPMSM drives[J]. IEEE Transactions on Power Electronics, 2016, 32(3): 2123-2132. doi: 10.1109/tpel.2016.2569418 [16] 张国强, 杜锦华. 永磁同步电机无位置传感器控制技术综述[J]. 电机与控制应用, 2024, 51(1): 1-13. doi: 10.19595/j.cnki.1000-6753.tces.160741Zhang G Q, Du J H. Review of position sensorless control technology for permanent magnet synchronous motors[J]. Electric Machines & Control Application, 2024, 51(1): 1-13. doi: 10.19595/j.cnki.1000-6753.tces.160741 [17] Wang G, Valla M, Solsona J. Position sensorless permanent magnet synchronous machine drives—A review[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5830-5842. doi: 10.1109/TIE.2019.2955409 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 221
- HTML全文浏览量: 111
- PDF下载量: 139
- 被引次数: 0