Research on Hydrodynamic Characteristics of Self-Propelled DeployedUUV Based on MRF and Overset Mesh Technology
-
摘要: 针对自航式布放无人水下航行器(UUV)在双体分离过程中受母平台与布放装置尾流场干扰、操纵性显著变化的问题, 文中基于雷诺平均方程(RANS)方法, 耦合多重参考系(MRF)模型与重叠网格技术, 建立适用于双体分离问题的数值计算方法。针对自航式布放UUV的水动力特性, 选取多个定常工况, 对比分析了典型回转体UUV在布放状态与自由状态下的水动力特性差异。研究表明: 在布放装置尾流场下UUV受到显著干扰, 包含阻力系数、升力系数和俯仰力矩系数在内的位置力系数变化范围为7.12%~343.04%, 旋转力系数变化范围为22.81%~97.16%, 操舵力系数变化范围为11.83%~164.98%, 操纵性对比自由状态显著减弱。文中研究结果可为自航式布放UUV的布放方案优化和控制策略设计提供一定理论依据。Abstract: To address the problem that self-propelled deployed unmanned undersea vehicle(UUV) are significantly disturbed by the wake field of the mother platform and deployment device during the two-body separation process, resulting in remarkable changes in maneuverability, based on the Reynolds average Navier-Stokes(RANS) method, this paper combined multi-reference frame(MRF) with the overset mesh technology to establish a numerical calculation method suitable for studying two-body separation. This paper further researched the hydrodynamic characteristics of a self-propelled deployed UUV. Multiple steady-state conditions were selected to compare and analyze the hydrodynamic characteristics of a typical rotary UUV in the deployment state and the free state. The research results show that under the wake field of the deployment device, the UUV is significantly disturbed, with position force coefficients including resistance coefficient, lift coefficient, and pitching moment coefficient changes ranging from 7.12% to 343.04%, rotational force coefficient changes ranging from 22.81% to 97.16%, and steering force coefficient changes ranging from 11.83% to 164.98%; the maneuverability of the UUV is significantly less than that in the free state. The research results of this paper can provide a certain theoretical basis for the optimization of the deployment scheme and the design of control strategies for self-propelled deployed UUVs.
-

图 5 各项位置力系数绝对值对比
Figure 5. Comparison of absolute values of position force coefficients

图 6 无因次角速度下各项旋转力系数绝对值对比
Figure 6. Comparison of absolute values of rotational force coefficients under dimensionless angular velocity
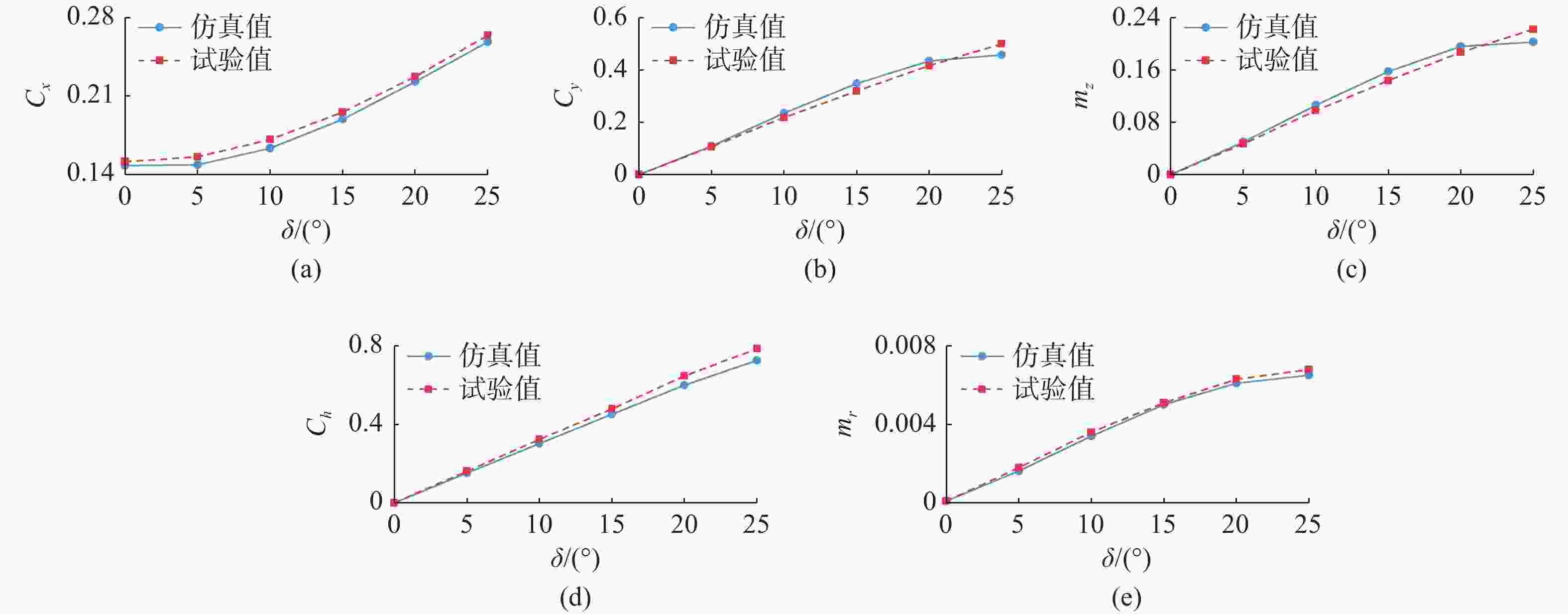
图 7 各项操舵力系数绝对值对比
Figure 7. comparison of absolute values of steering force coefficients
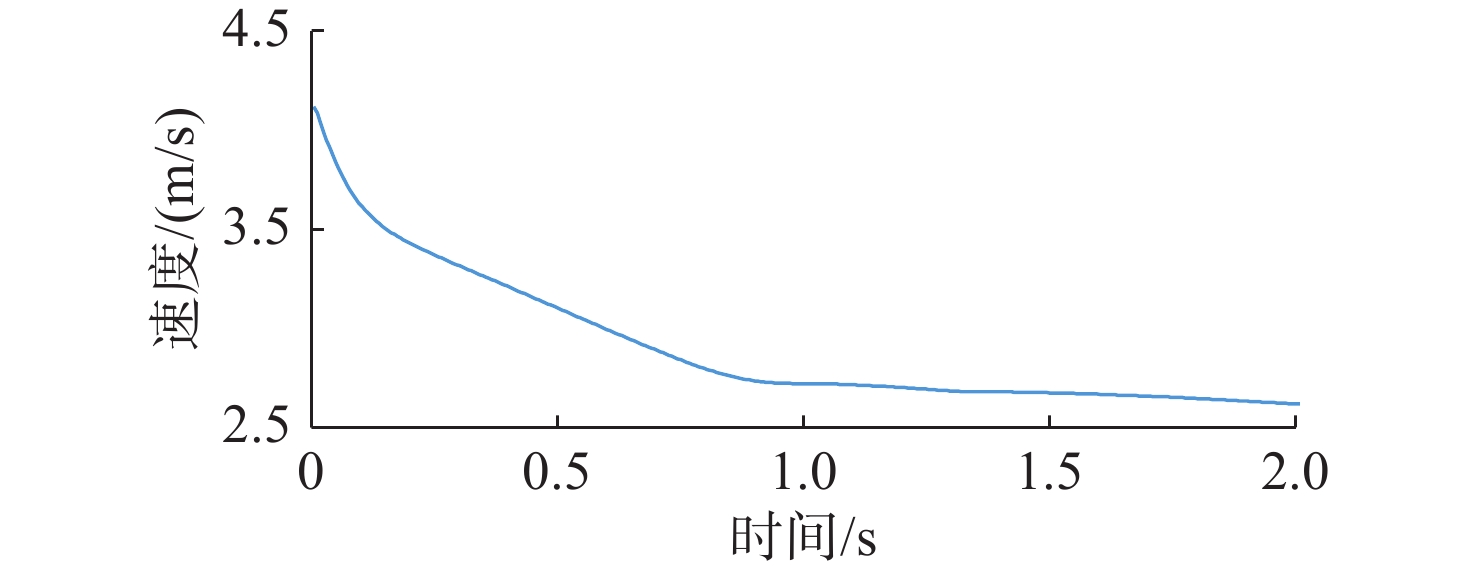
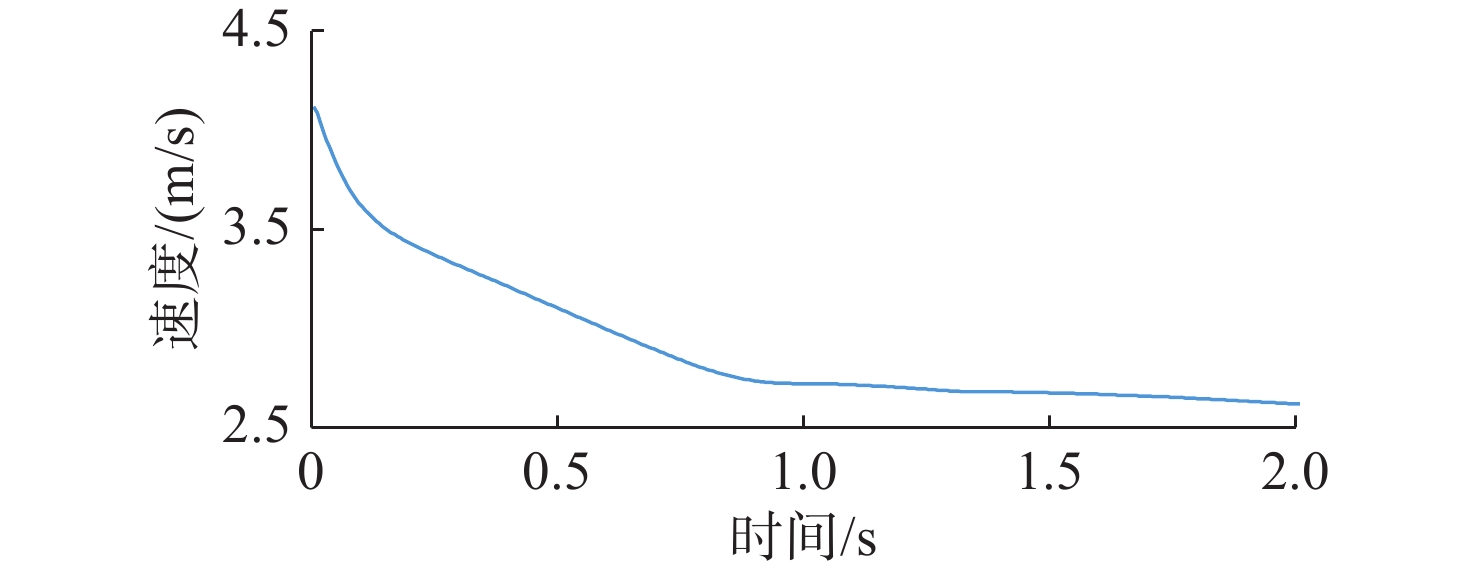
图 9 典型UUV分离过程速度衰减曲线
Figure 9. Speed attenuation curve of the typical UUV separating process

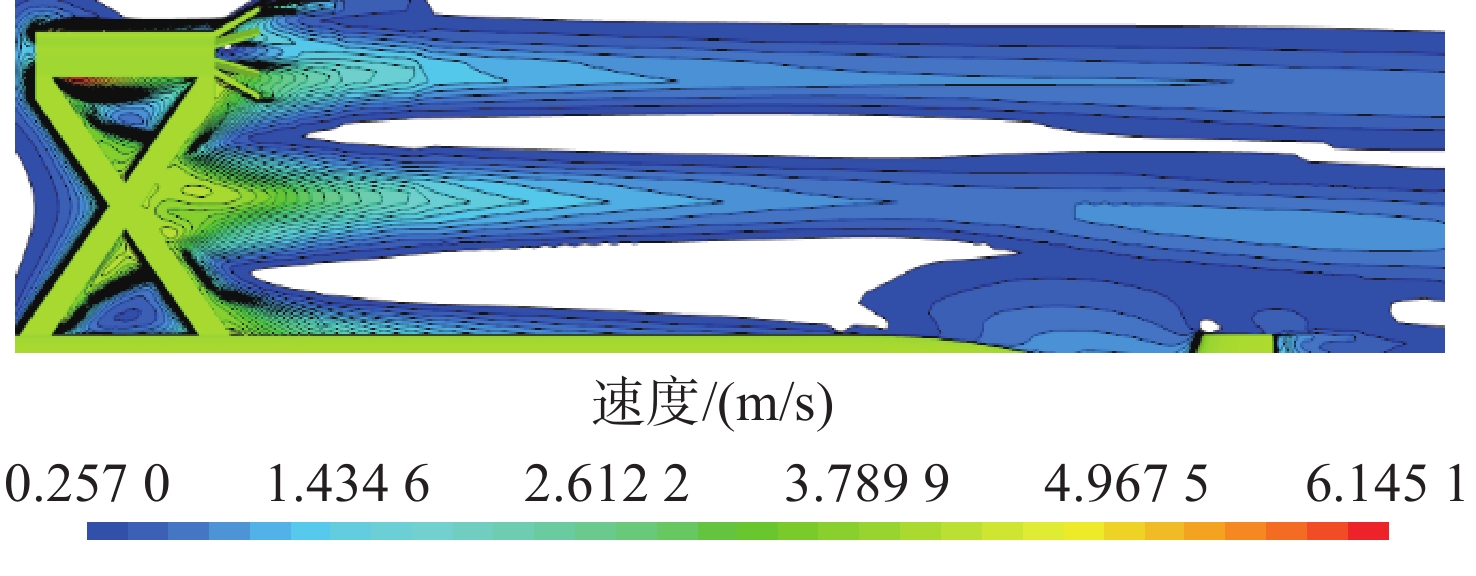
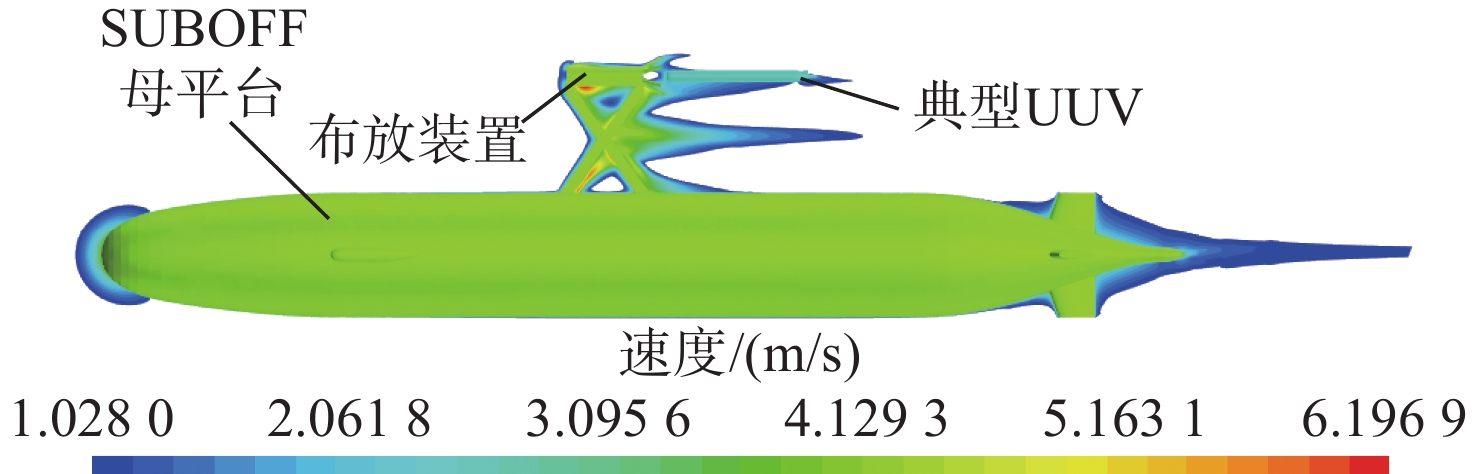
图 10 SUBOFF母平台和布放装置全局尾流场
Figure 10. Entire wake field of the SUBOFF platform and the deployment device
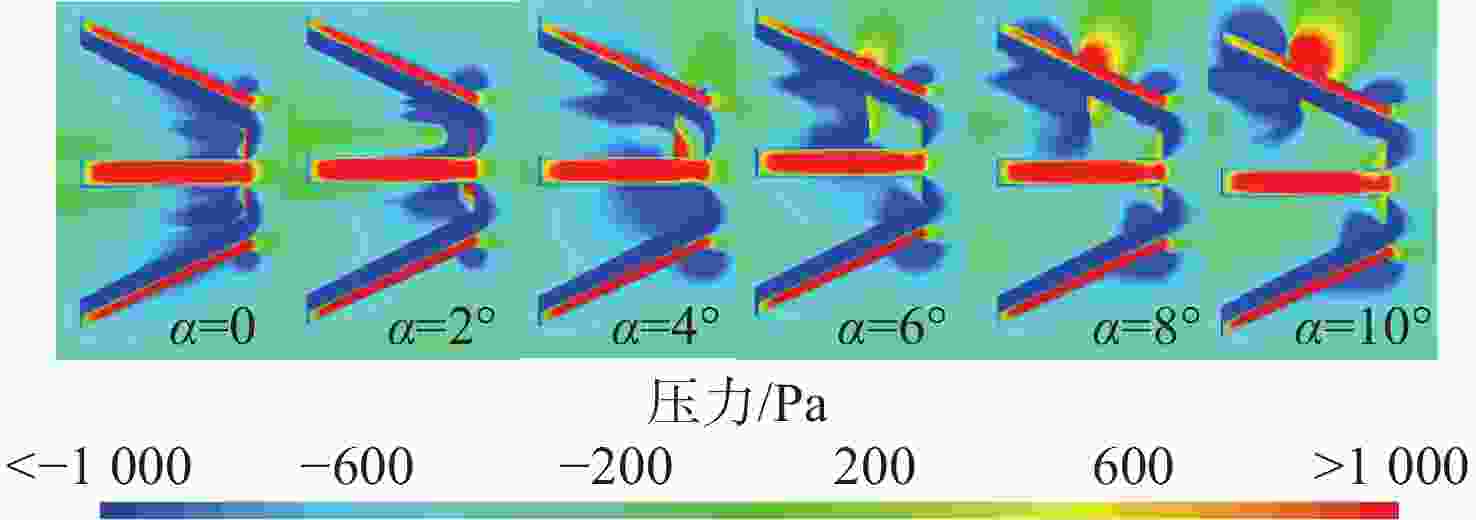
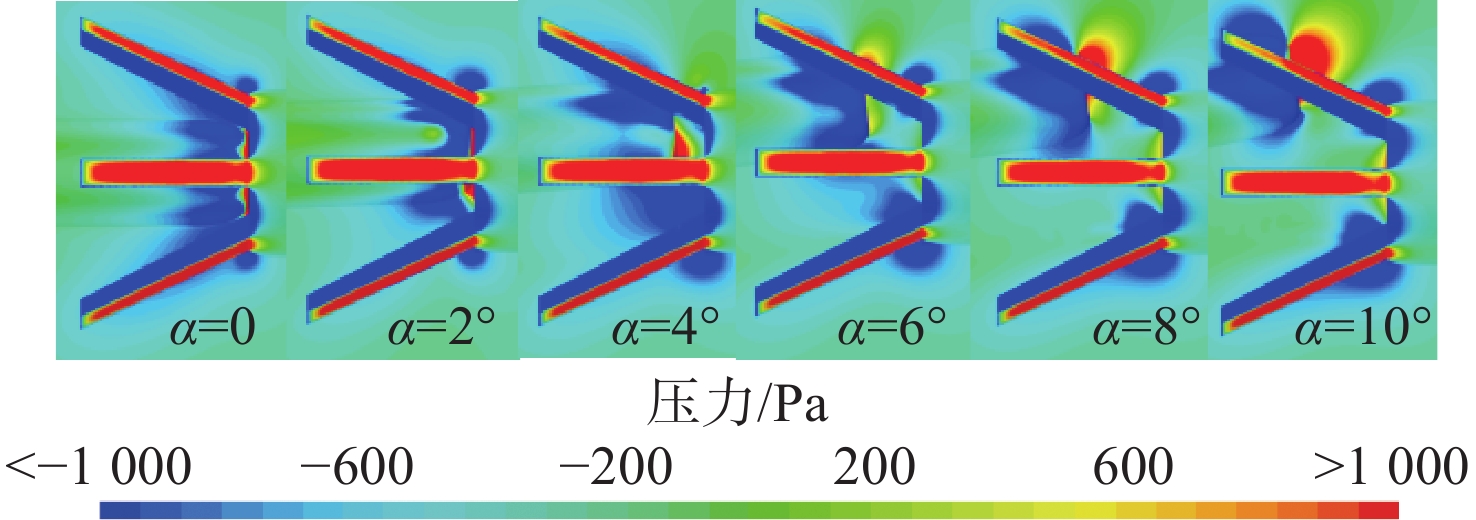
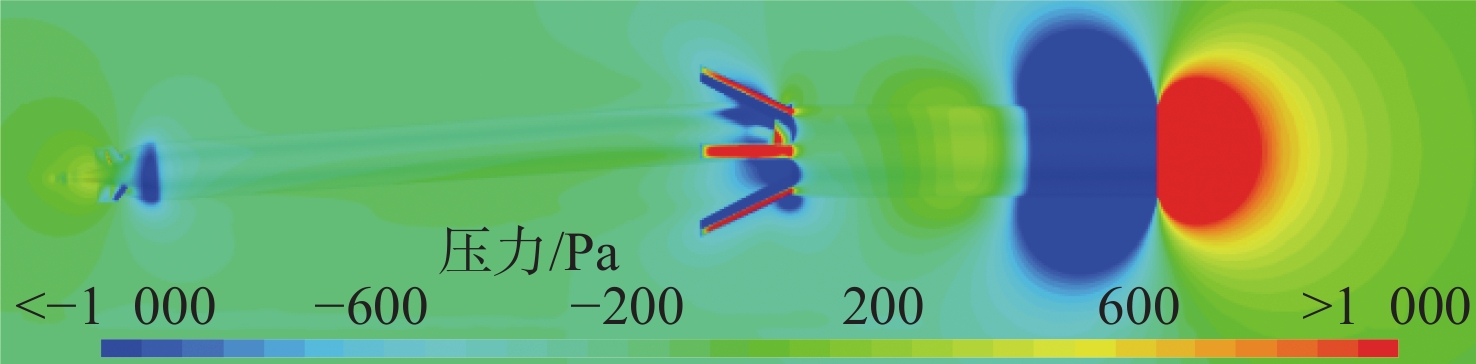
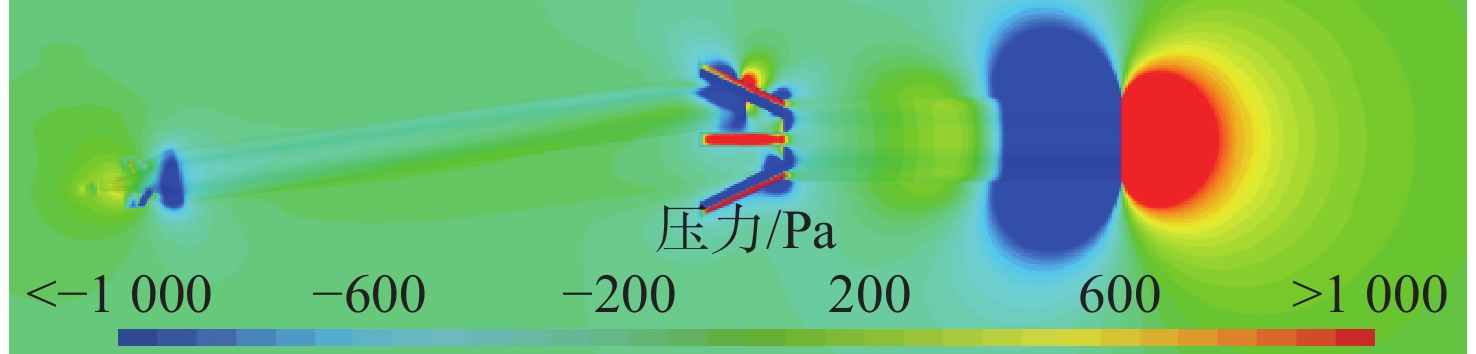
图 14 布放状态攻角变化下的压力云图
Figure 14. Pressure contour under the variation of attack angle in the deployment state
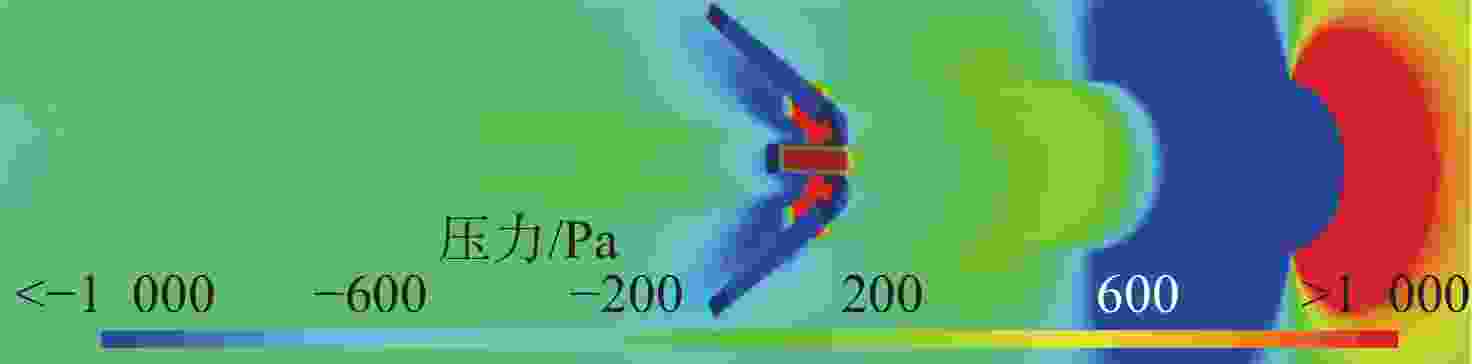
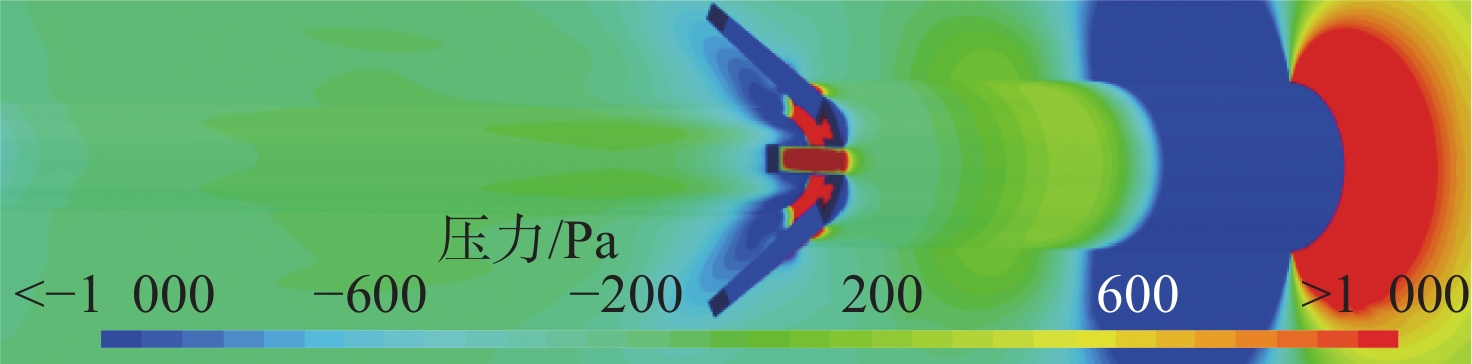
图 15 α=0°时布放装置出口的压力云图
Figure 15. Pressure contour of the deployment device outlet when α = 0°
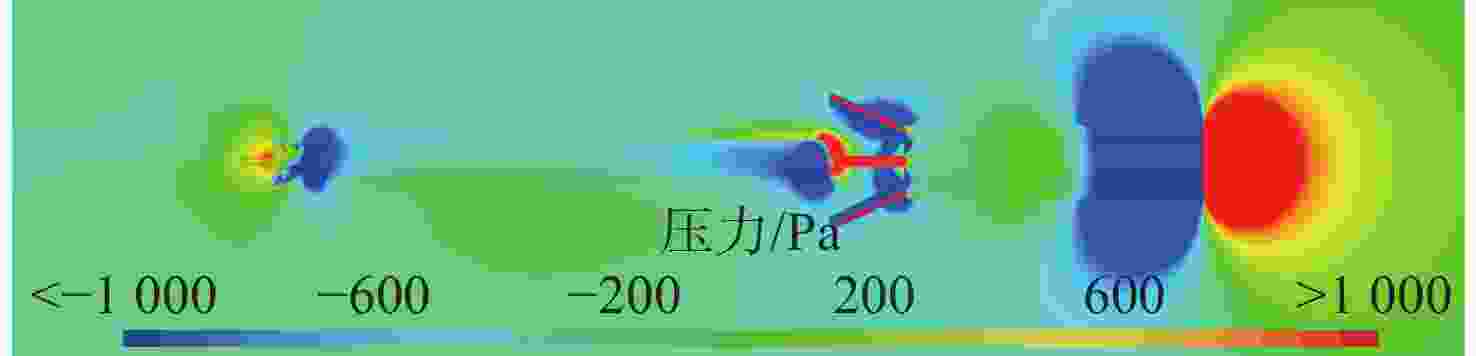
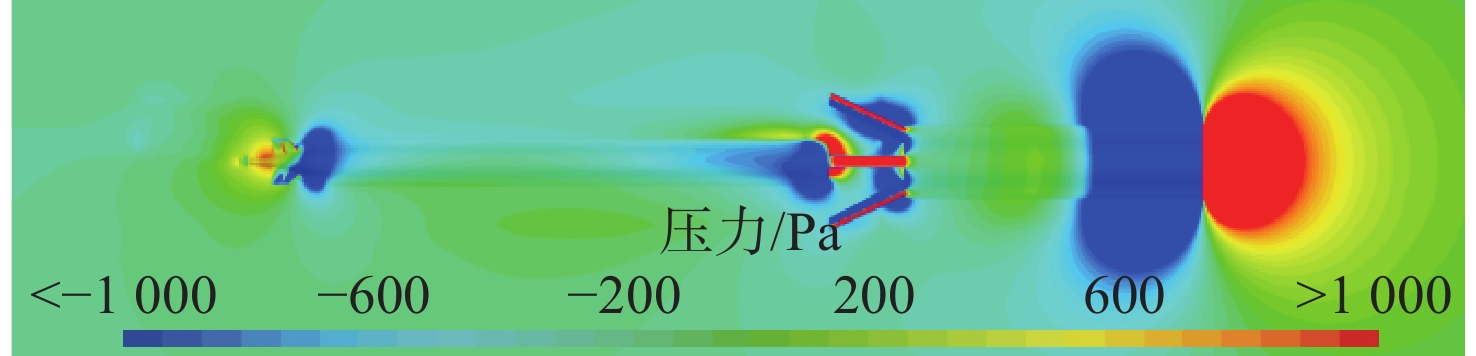
图 19 ω'=0.436时布放状态的压力云图
Figure 19. Pressure contour of the deployment state when ω'=0.436

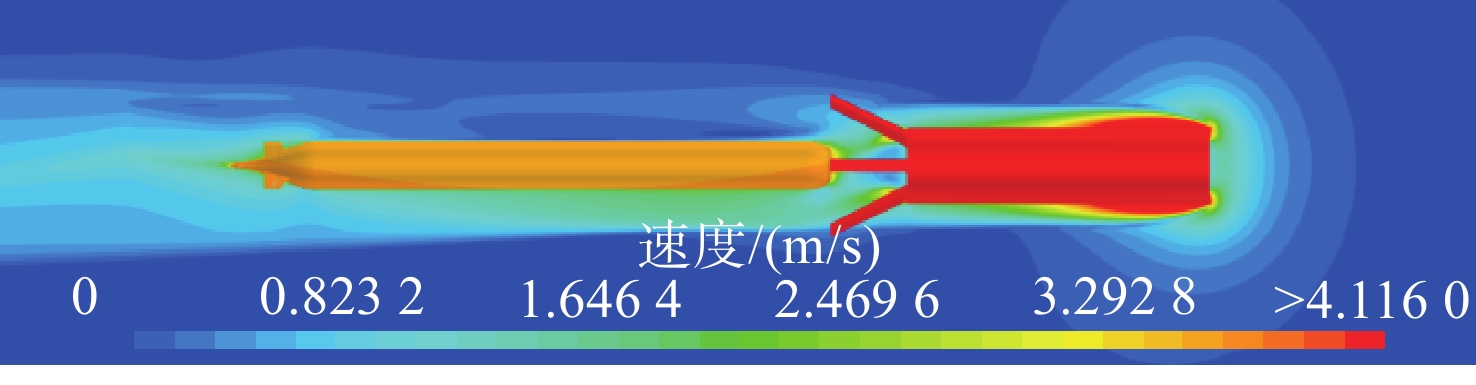
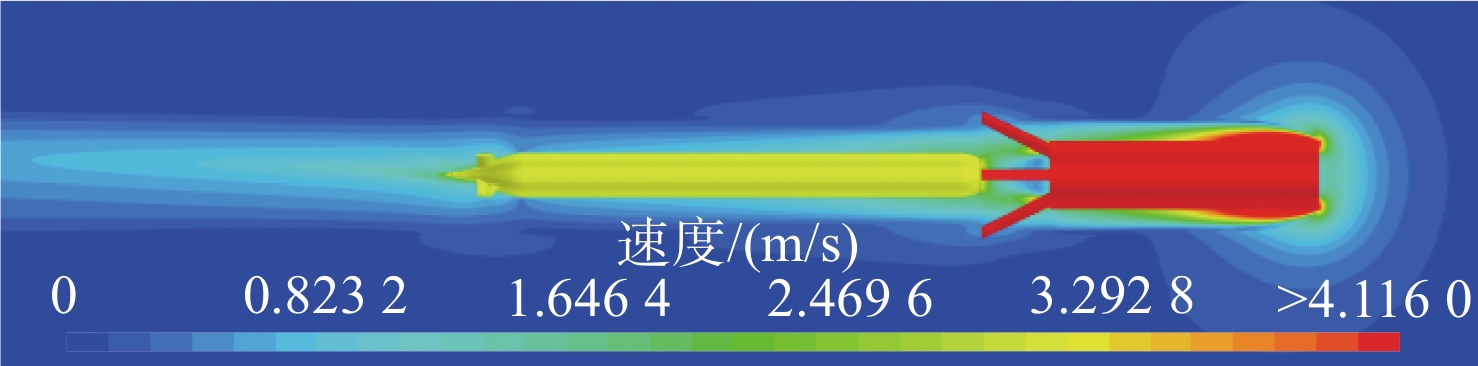
图 21 ω'=0.436时布放状态的速度云图
Figure 21. Velocity contour of the deployment state when ω'=0.436
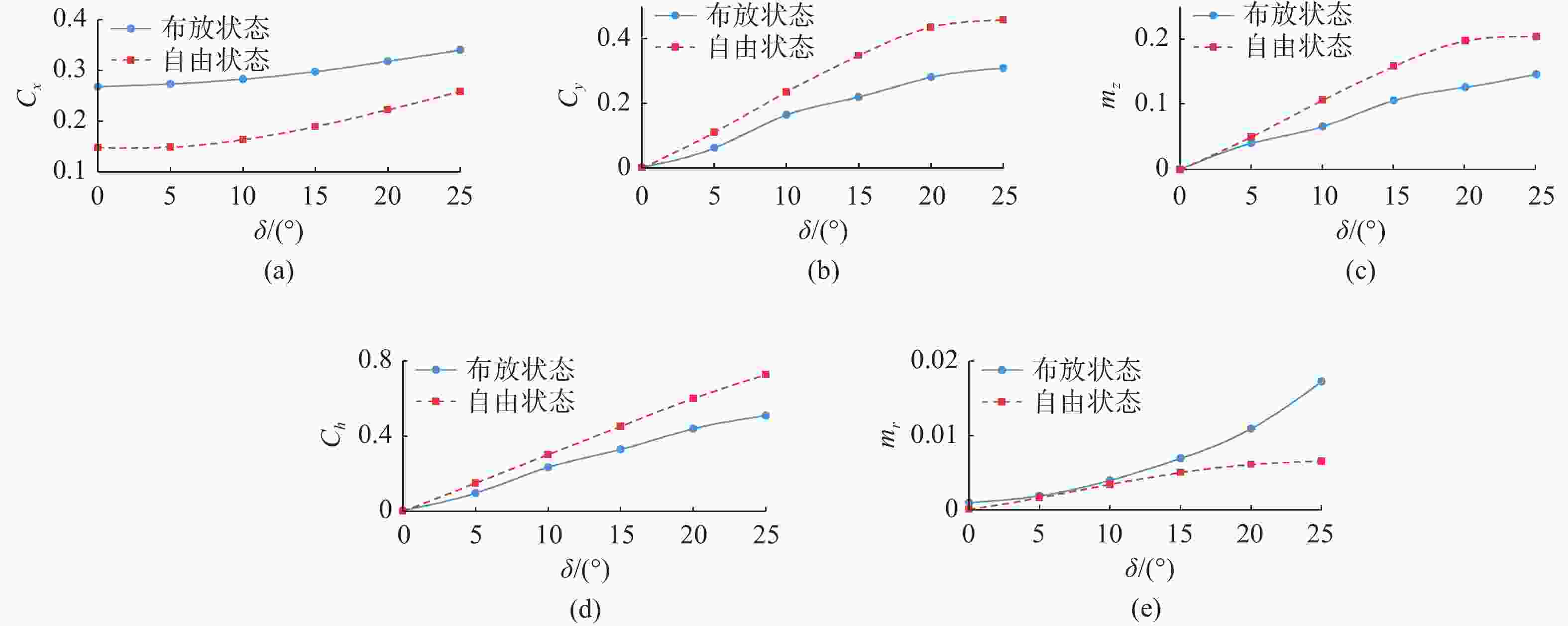
图 22 各项操舵力系数绝对值对比
Figure 22. Comparison of absolute values of steering force coefficients
表 1 位置力系数与力矩系数仿真误差
Table 1. Simulation errors of position force coefficient and moment force coefficient
攻角/(°) 阻力系数
误差/%升力系数
误差/%俯仰力矩
系数误差/%0 3.12 9.03 5.59 2 2.28 9.85 1.66 4 2.47 1.12 5.56 6 3.99 8.57 0.95 8 5.97 6.36 4.82 10 7.61 4.82 9.23  下载: 导出CSV
下载: 导出CSV
表 2 旋转力仿真相关参数
Table 2. Simulation parameters of rotational force
无因次角速度系数 回转半径/m 角速度/(rad/s) 切向速度/(m/s) 0.218 25.26 0.14 3.53 0.291 18.95 0.19 3.53 0.363 15.14 0.23 3.53 0.436 12.64 0.28 3.53
下载: 导出CSV
表 3 旋转力系数与力矩系数仿真误差
Table 3. Simulation errors of rotation force coefficient and moment coefficient
无因次角
速度系数阻力系数
误差/%升力系数
误差/%俯仰力矩
系数误差/%0.218 4.17 7.72 3.21 0.291 5.48 3.23 1.35 0.363 3.70 4.91 3.84 0.436 7.69 6.59 4.85
下载: 导出CSV
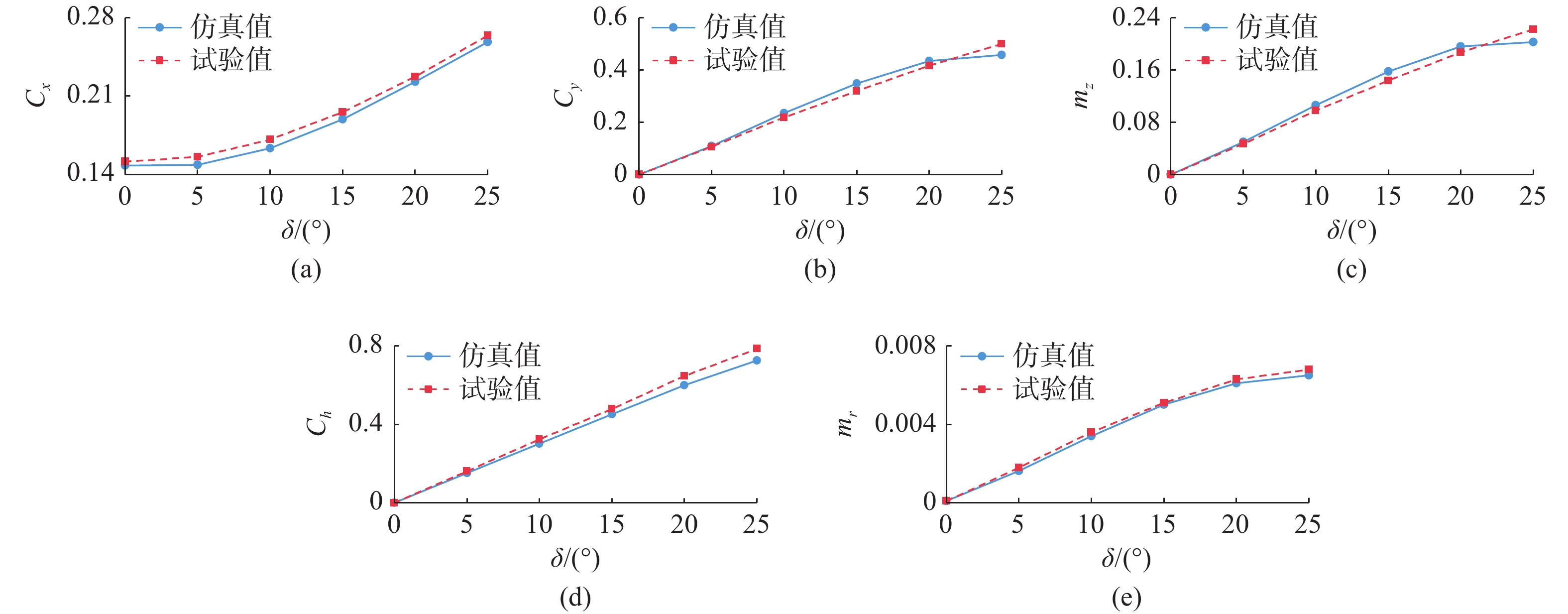
表 4 操舵力系数与力矩系数仿真误差
Table 4. Simulation errors of steering force coefficient and moment coefficient
舵偏角
/(°)阻力系数
误差/%升力系数
误差/%俯仰力矩
系数误差/%舵法向力
系数误差/%铰链力距
系数误差/%0 2.35 2.16 1.42 8.39 4.24 5 4.45 2.43 5.42 6.23 9.49 10 4.55 7.81 8.07 6.36 5.36 15 3.35 8.91 9.56 5.43 1.71 20 2.07 4.28 4.93 7.12 3.19 25 2.22 8.46 8.97 7.63 4.34
下载: 导出CSV
表 5 部分尾流场等值分层截面尺寸
Table 5. Cross-sectional dimensions of partial wake field equivalent layers
速度/(m/s) 横平面尺寸/m 纵平面尺寸/m 0.26 155.21×1.35 117.29×1.21 0.51 52.13×0.96 17.44×1.10 0.64 31.51×0.63 11.17×0.93 0.77 20.76×0.49 8.74×0.77 1.03 5.94×0.41 5.62×0.69
下载: 导出CSV
表 6 布放与自由状态对比的位置力和力矩系数变化
Table 6. Comparison of position force coefficient and moment coefficient between deployment and free state
攻角/(°) 阻力系数
变化/%升力系数
变化/%俯仰力矩
系数变化/%−10 37.61 29.45 14.19 −8 21.43 58.51 37.38 −6 32.92 31.30 69.03 −4 90.12 40.68 18.68 −2 221.25 13.64 45.22 0 343.04 231.75 960.00 2 241.25 36.36 20.25 4 92.59 47.46 23.24 6 82.93 36.52 74.99 8 17.86 37.77 30.85 10 43.35 32.73 7.12
下载: 导出CSV
表 7 布放与自由状态下旋转力和力矩系数变化对比
Table 7. Comparison of rotation force coefficient and moment coefficient between deployment and free state
无因次角速度系数 阻力系数
变化/%升力系数
变化/%俯仰力矩
系数变化/%−0.436 74.82 26.18 39.98 −0.363 75.17 30.58 41.37 −0.291 87.76 24.34 52.18 −0.218 85.33 38.99 52.30 0.218 86.00 32.70 47.11 0.291 89.12 22.12 49.27 0.363 73.10 31.62 42.51 0.436 72.66 25.63 39.04
下载: 导出CSV
表 8 布放与自由状态下操舵力和力矩系数变化对比
Table 8. Comparison of steering force coefficient and moment coefficient between deployment and free state
舵偏
角/(°)阻力系数
变化/%升力系数
变化/%俯仰力矩
系数变化/%舵法向力
系数变化/%铰链力距
系数变化/%0 80.88 257.14 292.16 1900.00 900.00 5 83.86 44.08 18.98 36.25 11.83 10 73.08 30.33 38.07 22.62 26.23 15 57.25 36.94 32.84 27.07 38.50 20 42.82 35.40 35.94 26.72 78.61 25 31.86 32.51 28.23 29.99 164.98
下载: 导出CSV
-
[1] 孟令帅, 李明烁, 林扬, 等. 自主水下机器人布放回收技术综述[J]. 无人系统技术, 2024, 7(1): 1-19.MENG L S, LI M S, LIN Y, et al. Launch and recovery technology of autonomous underwater vehicle[J]. Unmanned Systems Technology, 2024, 7(1): 1-19. [2] 朱炜, 张大中, 孙明月. 国外超大型无人潜航器发展研究[J]. 舰船科学技术, 2024, 46(24): 186-189.ZHU W, ZHANG D Z, SUN M Y. Research on the development of foreign extra large unmanned underwater vehicles[J]. Ship Science and Technology, 2024, 46(24): 186-189. [3] LUNDQUIST E. Bluefin robotics: Celebrating 25 years of UUVs[J]. Ocean News & Technology, 2023, 4: 46-48. [4] GRIGORY P K, IVAN N B. UUV launch/recovery moonpool aboard ships: Arrangement peculiarities[J]. Transactions of the Krylov State Research Centre, 2019, 3(389): 95-102. [5] 孙叶义, 武皓微, 李晔, 等. 智能无人水下航行器水下回收对接技术综述[J]. 哈尔滨工程大学学报, 2019, 40(1): 1-11.SUN Y Y, WU H W, LI Y, et al. Summary of AUV underwater recycle docking technology[J]. Journal of Harbin Engineering University, 2019, 40(1): 1-11. [6] 王钊, 樊鹏, 王福新, 等. 空中加受油安全对接控制验证要素分析[J]. 航空工程进展, 2020, 11(3): 408-413, 442.WANG Z, FAN P, WANG F X, et al. Analysis of verification elements of safety docking control for air refueling[J]. Advances in Aeronauticai Science and Engineering, 2020, 11(3): 408-413, 442. [7] SERHAT Y, GÜLTEN A Y. Identification of particular hydrodynamic parameters for a modular type 4 DOF underwater vehicle by means of CFD method[J]. The Industrial Robot, 2023, 50(4): 609-622. doi: 10.1108/IR-09-2021-0206 [8] HUSSAIN B , HUSSAIN A , QURESHI A M, et al. CFD study for the effect of eyebrow forward planes on dynamic stability of unmanned underwater vehicle with different stern forms[J]. Marine Systems & Ocean Technology, 2025, 20: 24. [9] HOU Y, DUAN F, ZHU W, et al. Time-sequenced hydrodynamics prediction system for underwater vehicles based on AI edge computing[J]. Ocean Engineering, 2024, 294, 116797. [10] 杨壮滔, 张镇, 何文生, 等. 水下无人平台动态布放UUV过程水动力特性[J]. 水下无人系统学报, 2022, 30(1): 115-121.YANG Z T, ZHANG Z, HE W S, et al. Hydrodynamic characteristics of UUV during dynamic deployment process of underwater unmanned platform[J]. Journal of Unmanned Undersea Systems, 2022, 30(1): 115-121. [11] 张大朋, 严谨, 赵博文. 基于静态重叠网格法的全附体潜艇的斜航仿真[J]. 计算机仿真, 2023, 40(5): 25-31.ZHANG D P, YAN J, ZHAO B W. Numerical simulation of full appended submarine in drift process based on static overset grid method[J]. Computer Simulation, 2023, 40(5): 25-31. [12] 张涛, 杨晨俊, 宋保维. 基于MRF模型的对转桨敞水性能数值模拟方法探讨[J]. 船舶力学, 2010, 14(8): 847-853.ZHANG T, YANG C J, SONG B W. Investigations on the numerical simulation method for the open-water performance of contra-rotating propellers based on the MRF model[J]. Journal of Ship Mechanics, 2010, 14(8): 847-853. [13] FONSECA P R, FONTOURA V D, et al. Development of a machine learning-based symbolic regression model for mixing time in large petroleum storage tanks[J]. Chemical Engineering Science, 2025, 316: 121903. [14] 詹致祥. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 1990. [15] HOBSON B W, BELLINGHAM J G, KIEFT B, et al. Tethys-class long range AUVs-extending the endurance of propeller-driven cruising AUVs from days to weeks[C]//2012 IEEE/OES Autonomous Underwater Vehicles(AUV). Southampton, UK: IEEE, 2012: 1-8. [16] 段浩. 鱼雷发射技术[M]. 北京: 国防工业出版社, 2015. [17] 李博, 莫军. 海流对水下运载器航行安全的影响评估[J]. 舰船科学技术, 2012, 34(8): 31-34.LI B, MO J. Evaluation of ocean current impacting on the navigational safety of the underwater carries machine[J]. Ship Science and Technology, 2012, 34(8): 31-34. -

 下载:
下载:










 点击查看大图
点击查看大图
计量
- 文章访问数: 511
- HTML全文浏览量: 187
- PDF下载量: 104
- 被引次数: 0