

Research Status and Application Prospect of Underwater Soft Gripper
-
摘要: 随着海洋资源开发和环境保护需求的不断增长, 水下机器人对灵活、安全且高效的软体抓取技术的需求日益迫切。文中阐述了水下软体抓取手的3种主要驱动设计方法: 流体变压驱动、线缆驱动和智能材料驱动。在此基础上, 重点分析了生物启发式设计、刚度调节技术、抓取与感知一体化以及多模态抓取等关键技术的研究进展, 并结合海洋垃圾清理、水产品捕捞、水下考古与文物保护以及生物样本采集等典型应用场景, 分析了软体抓取手在无损取样、多类型物体适应性和深海精细操作等方面的独特优势。最后, 展望了未来研究方向, 指出应重点突破高性能水下智能材料研发、多驱动方式融合, 以及能量与控制系统优化, 以推动抓取手向深海化与智能化演进, 实现水下全场景的可靠作业。Abstract: With the increasing demand for marine resource development and environmental protection, underwater robots have an urgent need for flexible, safe, and efficient soft grasping technology. This paper described three main actuation design methods for underwater soft grippers: fluid variable pressure drive, cable drive, and smart material drive. Based on this, the research progress of key technologies such as bio-inspired design, stiffness adjustment technology, integration of grasping and perception, and multi-modal grasping was analyzed. Combined with typical application scenarios such as marine waste cleanup, aquatic product fishing, underwater archaeology, and cultural relic protection, as well as biological sample collection, the unique advantages of soft grippers in non-destructive sampling, adaptability to multiple types of objects, and fine operations in the deep sea were analyzed. Finally, the future research directions of underwater soft grippers were prospected, and it is pointed out that efforts should be focused on the research and development of high-performance underwater intelligent materials, the integration of multiple driving methods, and the optimization of energy and control systems, so as to promote the evolution of the gripper towards deep sea and intelligentization and achieve reliable underwater operations in all scenarios.
-
Key words:
- underwater robot /
- soft griping /
- underwater actuation
-
图 1 水下软体抓取手发展脉络概述图
Figure 1. Overview of development venue of underwater soft grippers
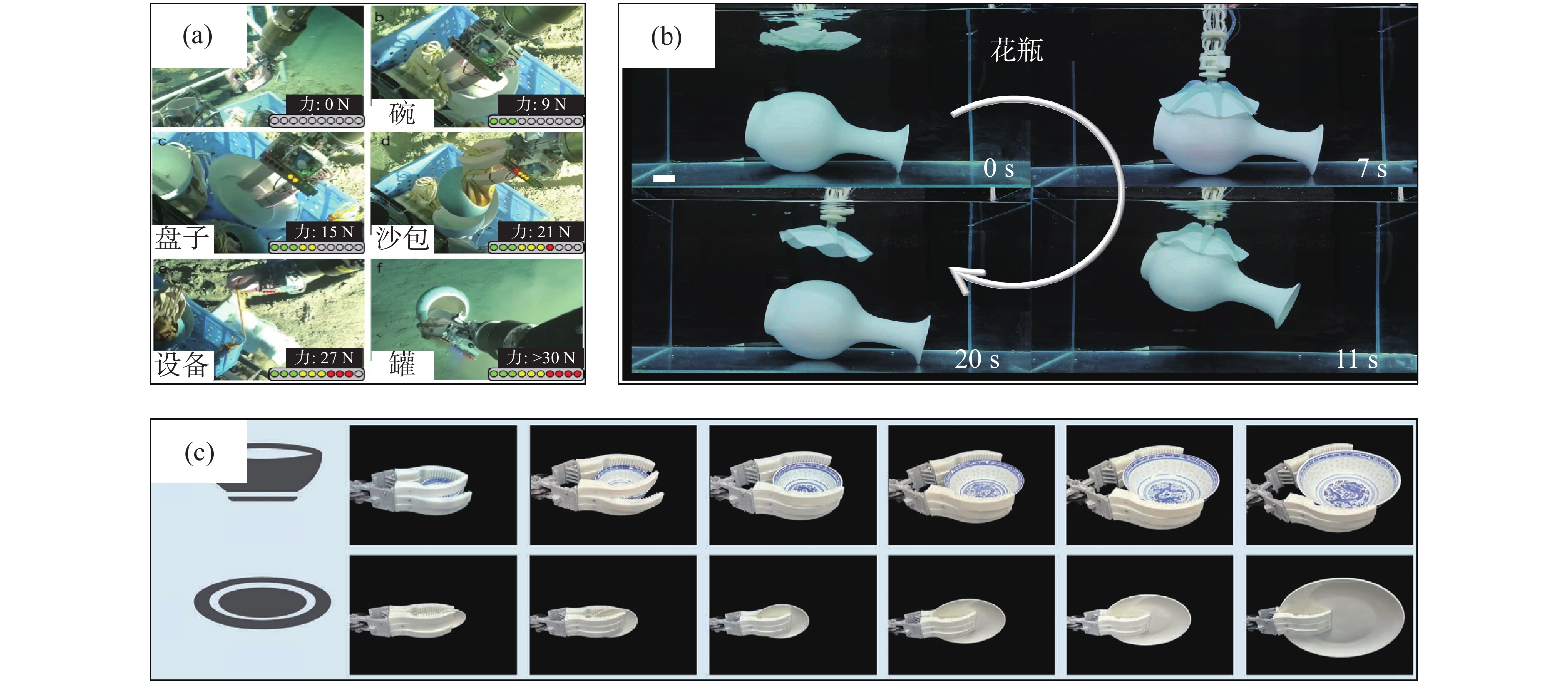
图 11 水下考古与文化遗产保护应用
Figure 11. Underwater archaeology and application of cultural heritage protection
-
[1] 王田苗, 郝雨飞, 杨兴帮, 等. 软体机器人: 结构、驱动、传感与控制[J]. 机械工程学报, 2017, 53(13): 1-13. doi: 10.3901/JME.2017.13.001WANG T M, HAO Y F, YANG X B, et al. Soft robotics: Structure, actuation, sensing and control[J]. Journal of Mechanical Engineering, 2017, 53(13): 1-13. doi: 10.3901/JME.2017.13.001 [2] RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. doi: 10.1038/nature14543 [3] DESHPANDE S, ALMUBARAK Y. Octopus-inspired robotic arm powered by shape memory alloys(SMA)[J]. Actuators, 2023, 12(10): 377. doi: 10.3390/act12100377 [4] VAR S C S, JOVANOVA J. Design of a soft underwater gripper with SMA actuation[C]//Proceedings of ASME 2023 Conference on Smart Materials, Adaptive Structures and Intelligent Systems(SMASIS 2023). Austin, Texas, USA: 2023, ASME: 1-8. [5] GOH G D, GOH G L, LYU Z, et al. 3D printing of robotic soft grippers: Toward smart actuation and sensing[J]. Advanced Materials Technologies, 2022, 7(11): 2101672. doi: 10.1002/admt.202101672 [6] ABOZAID Y A, ABOELRAYAT M T, FAHIM I S, et al. Soft robotic grippers: A review on technologies, materials, and applications[J]. Sensors and Actuators A: Physical, 2024, 372: 115380. doi: 10.1016/j.sna.2024.115380 [7] PEREIRA P J P D, CAMPILHO R D S G, PEREIRA J P G T, et al. Design and validation of gripper solution using soft robotics principles[J]. Advances in Science and Technology, 2023, 132: 109-119. [8] ZHANG S, KE X, JIANG Q, et al. Fabrication and functionality integration technologies for small-scale soft robots[J]. Advanced Materials, 2022, 34(52): 2200671. doi: 10.1002/adma.202200671 [9] BRUDER D, GRAULE M A, TEEPLE C B, et al. Increasing the payload capacity of soft robot arms by localized stiffening[J]. Science Robotics, 2023, 8(81): eadf9001. doi: 10.1126/scirobotics.adf9001 [10] CROWLEY G B, ZENG X, SU H J. A 3D printed soft robotic gripper with a variable stiffness enabled by a novel positive pressure layer jamming technology[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5477-5482. doi: 10.1109/LRA.2022.3157448 [11] HAM K, HAN J, PARK Y J. Soft gripper using variable stiffness mechanism and its application[J]. International Journal of Precision Engineering and Manufacturing, 2018, 19(4): 487-494. doi: 10.1007/s12541-018-0059-2 [12] ZHAO P, XIONG C, GAO Z, et al. Design and experiment investigation on soft grippers with modular variable stiffness structure[J]. Micromachines, 2023, 15(1): 88. doi: 10.3390/mi15010088 [13] PAGOLI A, ALKHATIB M, MEZOUAR Y. A soft variable stiffness gripper with magnetorheological fluids for robust and reliable grasping[J]. IEEE Robotics and Automation Letters, 2024, 9(5): 4519-4526. doi: 10.1109/LRA.2024.3382424 [14] CHEN T Y, YANG X D, ZHANG B J, et al. Scale-inspired programmable robotic structures with concurrent shape morphing and stiffness variation[J]. Science Robotics, 2024, 9(92): eadl0307. doi: 10.1126/scirobotics.adl0307 [15] ZHANG Z, CHEN G L, XUN Y H, et al. Bioinspired rigid-soft hybrid origami actuator with controllable versatile motion and variable stiffness[J]. IEEE Transactions on Robotics, 2023, 39(6): 4768-4784. doi: 10.1109/TRO.2023.3311630 [16] NIE S, LIU X, JI H, et al. Simulation and experiment study on deformation characteristics of the water hydraulic flexible actuator used for the underwater gripper[J]. IEEE Access, 2020, 8: 191447-191459. doi: 10.1109/ACCESS.2020.3032179 [17] JI H, ZHANG L, NIE S, et al. Optimization design and experiment study on a water hydraulic flexible actuator integrating flexible inner skeleton and soft external skin used for underwater flexible gripper[J]. Sensors and Actuators A: Physical, 2024, 366: 114957. doi: 10.1016/j.sna.2023.114957 [18] JI H, LAN Y, NIE S, et al. Development of an anthropomorphic soft manipulator with rigid-flexible coupling for underwater adaptive grasping[J]. Soft Robotics, 2023, 10(6): 1070-1082. doi: 10.1089/soro.2022.0215 [19] HUANG J, WANG Z, LI J, et al. A design of underwater soft gripper with water pressure sensing and enhanced stiffness[J]. Robotica, 2022, 41(2): 548-565. [20] CHEN G, YANG X, ZHANG X, et al. Water hydraulic soft actuators for underwater autonomous robotic systems[J]. Applied Ocean Research, 2021, 109: 102551. doi: 10.1016/j.apor.2021.102551 [21] 赵宇豪, 赵慧, 谭代彬. 软体机器人流体驱动方式综述[J]. 液压与气动, 2021, 45(4): 135-145.ZHAO Y H, ZHAO H, TAN D B. Review of fluid drive methods for soft robots[J]. Chinese Hydraulics & Pneumatics, 2021, 45(4): 135-145. [22] NAGACHANDRIKA P, SARATHI R, SRIDHARAN K. Characterization of silicone rubber/MgO nanocomposites for grippers in transmission line inspection robots[J]. IEEE Transactions on Nanotechnology, 2022, 21: 709-719. [23] SHIBUYA T, WATANABE S, SHINTAKE J. Silicone-layered waterproof electrohydraulic soft actuators for bio-inspired underwater robots[J]. Frontiers in Robotics and AI, 2024, 11: 1298624. doi: 10.3389/frobt.2024.1298624 [24] WANG H, XU H, ABU-DAKKA F J, et al. A bidirectional soft biomimetic hand driven by water hydraulic for dexterous underwater grasping[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2186-2193. doi: 10.1109/LRA.2022.3143297 [25] GALLOWAY K C, BECKER K P, PHILLIPS B, et al. Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3(1): 23-33. doi: 10.1089/soro.2015.0019 [26] LICHT S, COLLINS E, MENDES M L, et al. Stronger at depth: Jamming grippers as deep-sea sampling tools[J]. Soft Robotics, 2017, 4(4): 305-316. doi: 10.1089/soro.2017.0028 [27] SINATRA N R, TEEPLE C B, VOGT D M, et al. Ultra-gentle manipulation of delicate structures using a soft robotic gripper[J]. Science Robotics, 2019, 4(33): eaax5425. doi: 10.1126/scirobotics.aax5425 [28] LIU W, BAI X, YANG H, et al. Tendon driven bistable origami flexible gripper for high-speed adaptive grasping[J]. IEEE Robotics and Automation Letters, 2024, 9(6): 5417-5424. doi: 10.1109/LRA.2024.3389413 [29] JAMALI A, KNOERLEIN R, MISHRA D B, et al. Soft gripping fingers made of multi-stacked dielectric elastomer actuators with backbone strategy[J]. Biomimetics, 2024, 9(8): 505. doi: 10.3390/biomimetics9080505 [30] STUART H, WANG S, KHATIB O, et al. The ocean one hands: An adaptive design for robust marine manipulation[J]. The International Journal of Robotics Research, 2017, 36(2): 150-166. doi: 10.1177/0278364917694723 [31] RENDA F, GIORELLI M, CALISTI M, et al. Dynamic model of a multibending soft robot arm driven by cables[J]. IEEE Transactions on Robotics, 2014, 30(5): 1109-1122. doi: 10.1109/TRO.2014.2325992 [32] STUART H S, WANG S, GARDINEER B, et al. A compliant underactuated hand with suction flow for underwater mobile manipulation[C]//2014 IEEE international conference on robotics and automation(ICRA). Hong Kong , China: IEEE, 2014: 6691-6697. [33] MURA D, BARBAROSSA M, DINUZZI G, et al. A soft modular end effector for underwater manipulation: A gentle, adaptable grasp for the ocean depths[J]. IEEE Robotics & Automation Magazine, 2018, 25(4): 45-56. [34] GUO H, NASARE R, LIANG C, et al. Halogen-bonded liquid crystal elastomers as initiator-free photochemical actuators[J]. Advanced Materials, 2025: 2504551. [35] WANG X, WANG W, LIU H, et al. Bionic sea anemone actuator with a double-layered gripper driven by multiple physical fields[J]. ACS Applied Polymer Materials, 2023, 5(7): 5582-5591. doi: 10.1021/acsapm.3c00886 [36] QU J, XU Y, LI Z, et al. Recent advances on underwater soft robots[J]. Advanced Intelligent Systems, 2024, 6(2): 2300299. doi: 10.1002/aisy.202300299 [37] WEI X, WANG Y, LIU Y, et al. Biomimetic design strategies for biomedical applications[J]. Matter, 2024, 7(3): 826-854. doi: 10.1016/j.matt.2023.12.030 [38] KUMAR G D, REGO R M, RAO H J, et al. Understanding the interfacial science of nature-inspired materials for versatile applications[J]. Surfaces and Interfaces, 2024, 47: 104181. doi: 10.1016/j.surfin.2024.104181 [39] HE S, GUO B, SUN X, et al. Bio-inspired instant underwater adhesive hydrogel sensors[J]. ACS Applied Materials & Interfaces, 2022, 14(40): 45869-45879. [40] CHEN Y, MENG J, ZHU Z, et al. Bio-inspired underwater super oil-repellent coatings for anti-oil pollution[J]. Langmuir, 2018, 34(21): 6063-6069. doi: 10.1021/acs.langmuir.8b01061 [41] CHEN R, SONG R, ZHANG Z, et al. Bio-inspired shape-adaptive soft robotic grippers augmented with electro adhesion functionality[J]. Soft Robotics, 2019, 6(6): 701-712. doi: 10.1089/soro.2018.0120 [42] LI G, WONG T W, SHIH B, et al. Bioinspired soft robots for deep-sea exploration[J]. Nature Communications, 2023, 14(1): 7097. doi: 10.1038/s41467-023-42882-3 [43] HASANSHAHI B, CAO L, SONG K Y, et al. Design of soft robots: A review of methods and future opportunities for research[J]. Machines, 2024, 12(8): 527. doi: 10.3390/machines12080527 [44] CIANCHETTI M, CALISTI M, MARGHERI L, et al. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot[J]. Bioinspiration & Biomimetics, 2015, 10(3): 035003. [45] ZHAO Y, WU Y, WANG L, et al. Bio-inspired reversible underwater adhesive[J]. Nature Communications, 2017, 8(1): 2218. doi: 10.1038/s41467-017-02387-2 [46] WANG W, LIU J, XIE G, et al. A bio-inspired electrocommunication system for small underwater robots[J]. Bioinspiration & Biomimetics, 2017, 12(3): 036002. [47] LIU Y, WANG L, NIU F, et al. A track-type inverted climbing robot with bio-inspired spiny grippers[J]. Journal of Bionic Engineering, 2020, 17(5): 920-931. doi: 10.1007/s42235-020-0093-5 [48] JIA J J, XIAN Q W, FA J D, et al. Bio-inspired steganography for secure underwater acoustic communications[J]. IEEE Communications Magazine, 2018, 56(10): 156-162. doi: 10.1109/MCOM.2018.1601228 [49] ZHANG Y, KONG D, SHI Y, et al. Recent progress on underwater soft robots: adhesion, grabbing, actuating, and sensing[J]. Frontiers in Bioengineering and Biotechnology, 2023, 11: 1196922. doi: 10.3389/fbioe.2023.1196922 [50] WU Q X, YANG X C, WU Y, et al. A novel underwater bipedal walking soft robot bio-inspired by the coconut octopus[J]. Bioinspiration & Biomimetics, 2021, 16(4): 046007. [51] SONG J, FENG Y, HONG Z, et al. Octopus-inspired adaptable soft grippers based on 4D printing: numerical modeling, inverse design, and experimental validation[J]. Advanced Intelligent Systems, 2023, 5(8): 2200384. doi: 10.1002/aisy.202200384 [52] JIANG H, HAN X, JING Y, et al. Rigid-soft interactive design of a lobster-inspired finger surface for enhanced grasping underwater[J]. Frontiers in Robotics and AI, 2021, 8: 787187. doi: 10.3389/frobt.2021.787187 [53] GUO H, HUANG J, ZHANG I, et al. Fish mouth inspired origami gripper for robust multi-type underwater grasping[EB/OL]. (2025-03-20)[2025-09-29]. https://arxiv.org/abs/2503.11049 [54] CHEN X B, YAO J T, ZHANG S, et al. Web Gripper: Bioinspired cobweb soft gripper for adaptable and stable grasping[J]. IEEE Transactions on Robotics, 2023, 39(4): 3059-3071. doi: 10.1109/TRO.2023.3262115 [55] CAPALBO C E, TOMAINO D, BRUNO F, et al. A soft robotic gripper with neutrally buoyant jamming pads for gentle yet secure grasping of underwater objects[J]. IEEE Journal of Oceanic Engineering, 2022, 47(4): 975-983. doi: 10.1109/JOE.2022.3156746 [56] KIM M, OH J, SON D. Layer-jamming soft gripper for improved stiffness control and underwater adhesion[J]. Extreme Mechanics Letters, 2025, 77: 102322. doi: 10.1016/j.eml.2025.102322 [57] WU M, ZHENG X, LIU R, et al. Glowing sucker octopus (stauroteuthis syrtensis)-inspired soft robotic gripper for underwater self-adaptive grasping and sensing[J]. Advanced Science, 2022, 9(17): 2104382. doi: 10.1002/advs.202104382 [58] MO L, ZHANG D, FU X, et al. A multidirectional external perception soft actuator based on flexible optical waveguide for underwater teleoperation[J]. Advanced Intelligent Systems, 2023, 5(10): 2300029. doi: 10.1002/aisy.202300029 [59] SHI Q F, SUN Z D, LE X H, et al. Soft robotic perception system with ultrasonic auto-positioning and multimodal sensory intelligence[J]. ACS Nano, 2023, 17(5): 4985-4998. doi: 10.1021/acsnano.2c12592 [60] NADEAU P, ABBOTT M, MELVILLE D, et al. Tactile sensing based on fingertip suction flow for submerged dexterous manipulation[C]//2020 IEEE International Conference on Robotics and Automation(ICRA). Paris, France: IEEE, 2020: 3701-3707. [61] ZUO Z, WANG H, ZHANG Q, et al. A deep-sea sensorized soft gripper with force estimation and interactive capabilities[J]. IEEE/ASME Transactions on Mechatronics, 2025: 1-11. [62] MAO B, ZHOU K, XIANG Y, et al. A bioinspired robotic finger for multimodal tactile sensing powered by fiber optic sensors[J]. Advanced Intelligent Systems, 2024, 6(8): 2400175. doi: 10.1002/aisy.202400175 [63] CHEN H, LI Y, XU P, et al. Octopus-inspired soft gripper with embedded triboelectric tactile sensor for underwater target recognition and grasp[J]. Nano Energy, 2025, 140: 111007. doi: 10.1016/j.nanoen.2025.111007 [64] XIE Z, YUAN F, LIU J, et al. Octopus-inspired sensorized soft arm for environmental interaction[J]. Science Robotics, 2023, 8(84): 7852. doi: 10.1126/scirobotics.adh7852 [65] XIANG F, ZHANG Z, HAN Y, et al. Highly sensitive aquatic iontronic-based tri-axis force sensor array for underwater robotic gripping[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 1-10. [66] GUO N, HAN X, LIU X, et al. Autoencoding a soft touch to learn grasping from on-land to underwater[J]. Advanced Intelligent Systems, 2024, 6(1): 2300382. doi: 10.1002/aisy.202300382 [67] WANG Q, SONG Y, LIU P, et al. Self-powered underwater pressing and position sensing and autonomous object grasping with a porous thermoplastic polyurethane film sensor[J]. Advanced Functional Materials, 2024, 34(28): 2315648. doi: 10.1002/adfm.202315648 [68] LIANG M, ZHU J, KE X, et al. Bio-inspired multimodal soft grippers: A review[J]. Bioinspiration & Biomimetics, 2025, 20(3): 31002. [69] LIU J, SONG Z, LU Y, et al. An underwater robotic system with a soft continuum manipulator for autonomous aquatic grasping[J]. IEEE/ASME Transactions on Mechatronics, 2023, 29(2): 1007-1018. [70] KURUMAYA S, PHILLIPS B T, BECKER K P, et al. A modular soft robotic wrist for underwater manipulation[J]. Soft Robotics, 2018, 5(4): 399-409. doi: 10.1089/soro.2017.0097 [71] SANDOVAL J A, XU T, ADIBNAZARI I, et al. Combining suction and friction to stabilize a soft gripper to shear and normal forces, for manipulation of soft objects in wet environments[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4134-4141. doi: 10.1109/LRA.2022.3149306 [72] ZUO Z, HE X, WANG H, et al. A nitinol-embedded wearable soft robotic gripper for deep-sea manipulation: a wearable device for deep-sea delicate operation[J]. IEEE Robotics & Automation Magazine, 2024, 31(1): 96-107. [73] WU M, AFRIDI W H, WU J, et al. Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities[J]. Research, 2024, 7: 456. doi: 10.34133/research.0456 [74] ZHAO Y, ZHU J, ZHANG J, et al. Enhancing grasping diversity with a pinch-suction and soft-rigid hybrid multimodal gripper[J]. IEEE Transactions on Robotics, 2025, 41: 3890-3907. doi: 10.1109/TRO.2025.3577014 [75] YOUSSEF S M, SOLIMAN M, SALEH M A, et al. Underwater soft robotics: A review of bioinspiration in design, actuation, modeling, and control[J]. Micromachines, 2022, 13(1): 110. doi: 10.3390/mi13010110 [76] HASIB S A, GULZAR M M, OISHY S R, et al. An investigation of innovative strategies in underwater soft robotics[J]. Engineering Science and Technology, an International Journal, 2025, 70: 102123. doi: 10.1016/j.jestch.2025.102123 [77] KIM H, NA H, NOH S, et al. Inherently integrated microfiber-based flexible proprioceptive sensor for feedback-controlled soft actuators[J]. NPJ Flexible Electronics, 2024, 8(1): 15. doi: 10.1038/s41528-024-00302-6 [78] ZHANG J, ZHOU J, CHENG Z K, et al. Fabrication, mechanical modeling, and experiments of a 3D-motion soft actuator for flexible sensing[J]. IEEE Access, 2020, 8: 159100-159109. doi: 10.1109/ACCESS.2020.3017447 [79] DU T, HUGHES J, WAH S, et al. Underwater soft robot modeling and control with differentiable simulation[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4994-5001. doi: 10.1109/LRA.2021.3070305 [80] SUO F, HUI X, HUA P, et al. A biomimetic rigid-soft hybrid underwater gripper with compliance, stability, precise control, and high load capacity[J]. IEEE Transactions on Robotics, 2025, 41: 3099-3112. doi: 10.1109/TRO.2025.3562458 [81] HUANG J, WANG Z, LI J, et al. A design of underwater soft gripper with water pressure sensing and enhanced stiffness[J]. Robotica, 2023, 41(2): 548-565. doi: 10.1017/S0263574722001412 [82] XU F, WANG H, CHEN W, et al. Adaptive visual servoing control for an underwater soft robot[J]. Assembly Automation, 2018, 38(5): 669-677. doi: 10.1108/AA-12-2017-193 [83] PICARDI G, DE L M, CHIMIENTI G, et al. User-driven design, and development of an underwater soft gripper for biological sampling and litter collection[J]. Journal of Marine Science and Engineering, 2023, 11(4): 771. doi: 10.3390/jmse11040771 [84] FANG Q, ZHANG J, XIANG P, et al. Reconfigurable transparent variable-stiffness soft robot for underwater operations[J]. Advanced Intelligent Systems, 2024, 6(9): 2300688. doi: 10.1002/aisy.202300688 [85] LI H, LI X, WANG B, et al. A fault-tolerant soft swallowing robot capable of grasping delicate structures underwater[J]. IEEE Robotics and Automation Letters, 2023, 8(6): 3302-3309. doi: 10.1109/LRA.2023.3266668 [86] KANNO R, KWAK B, PANKHURST M, et al. Edible soft actuators based on konjac glucomannan for underwater operation[J]. Advanced Intelligent Systems, 2024, 6(5): 2300473. doi: 10.1002/aisy.202300473 [87] HERRERO P D, MARTÍNEZ B H. Soft gripper design and fabrication for underwater grasping[J]. Applied Sciences, 2022, 12(21): 10694. doi: 10.3390/app122110694 [88] SHAN B, LIU C, CHEN R, et al. A self-powered sensor for detecting slip state and pressure of underwater actuators based on triboelectric nanogenerator[J]. Materials Today Nano, 2023, 24: 100391. doi: 10.1016/j.mtnano.2023.100391 [89] ZAREBIDOKI M, DHUPIA J S, LIAROKAPIS M, et al. A cable-driven underwater robotic system for delicate manipulation of marine biology samples[J]. Journal of Field Robotics, 2024, 41(8): 2615-2629. doi: 10.1002/rob.22381 [90] VOGT D M, BECKER K P, PHILLIPS B T, et al. Shipboard design, and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms[J]. PLOS ONE, 2018, 13(8): 0200386. [91] PHILLIPS B T, BECKER K P, KURUMAYA S, et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration[J]. Scientific Reports, 2018, 8(1): 14779. doi: 10.1038/s41598-018-33138-y -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 778
- HTML全文浏览量: 397
- PDF下载量: 155
- 被引次数: 0

图(12)




