Research Status and Underwater Application Prospects of Flexible Manipulator
-
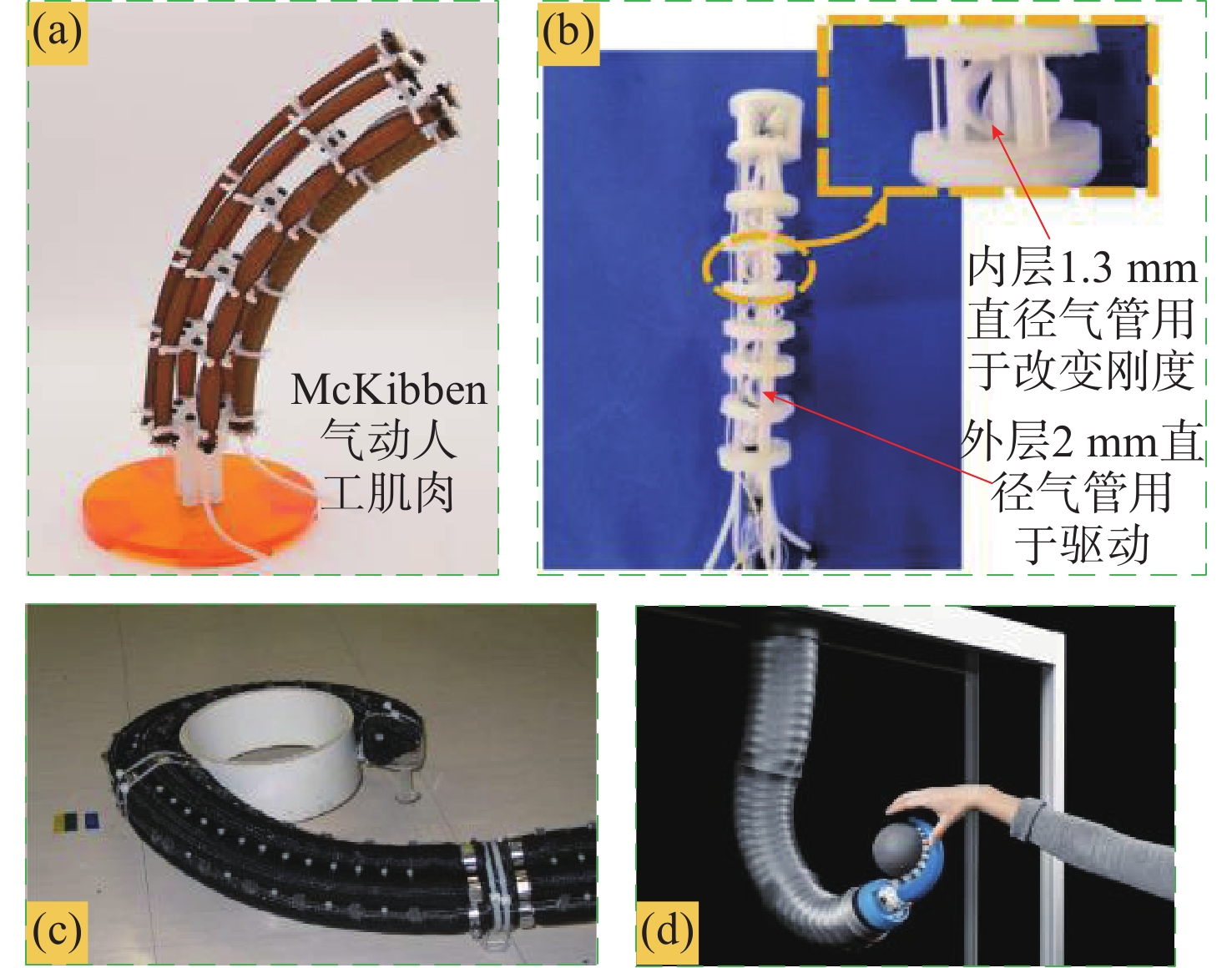
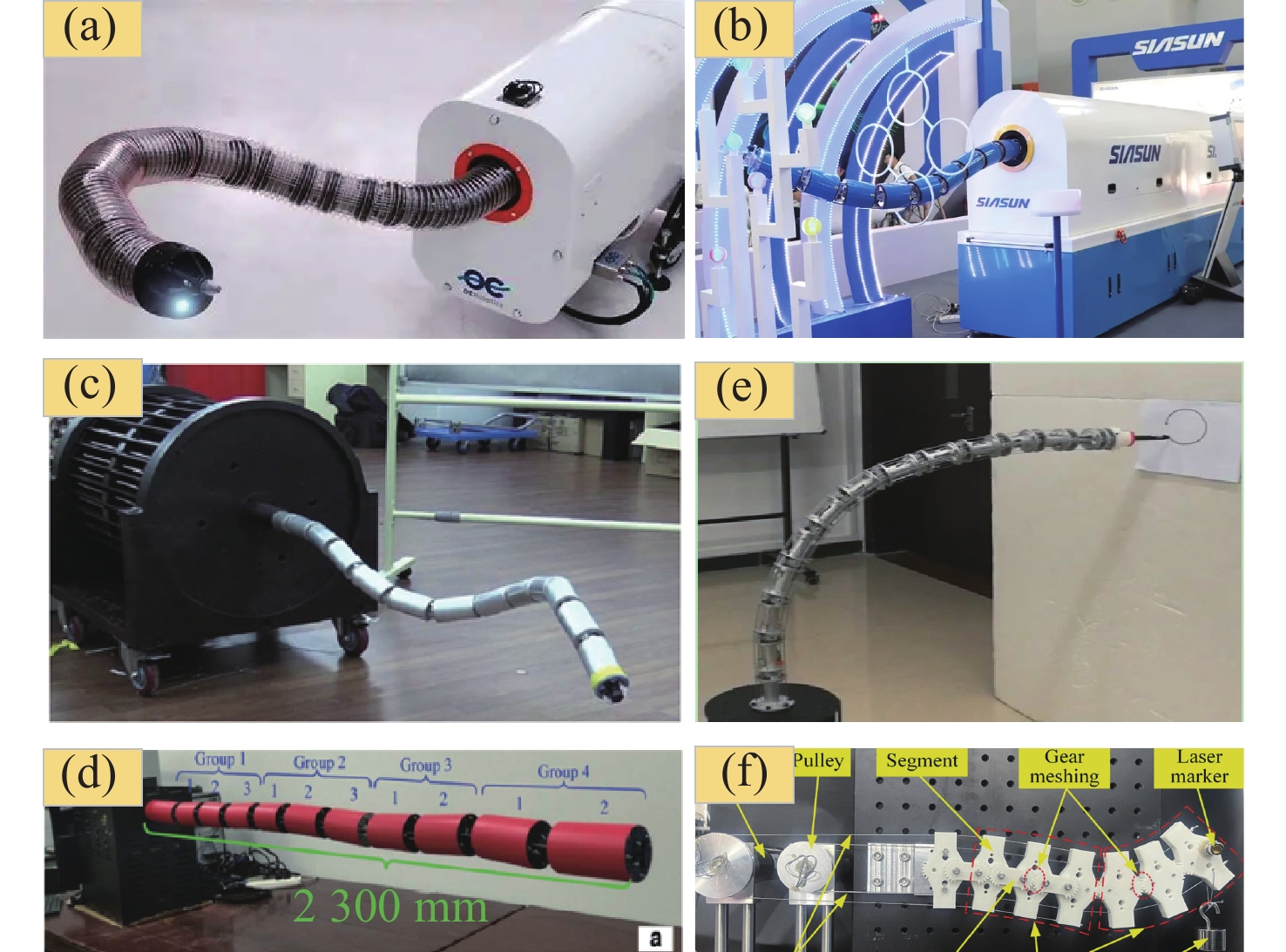
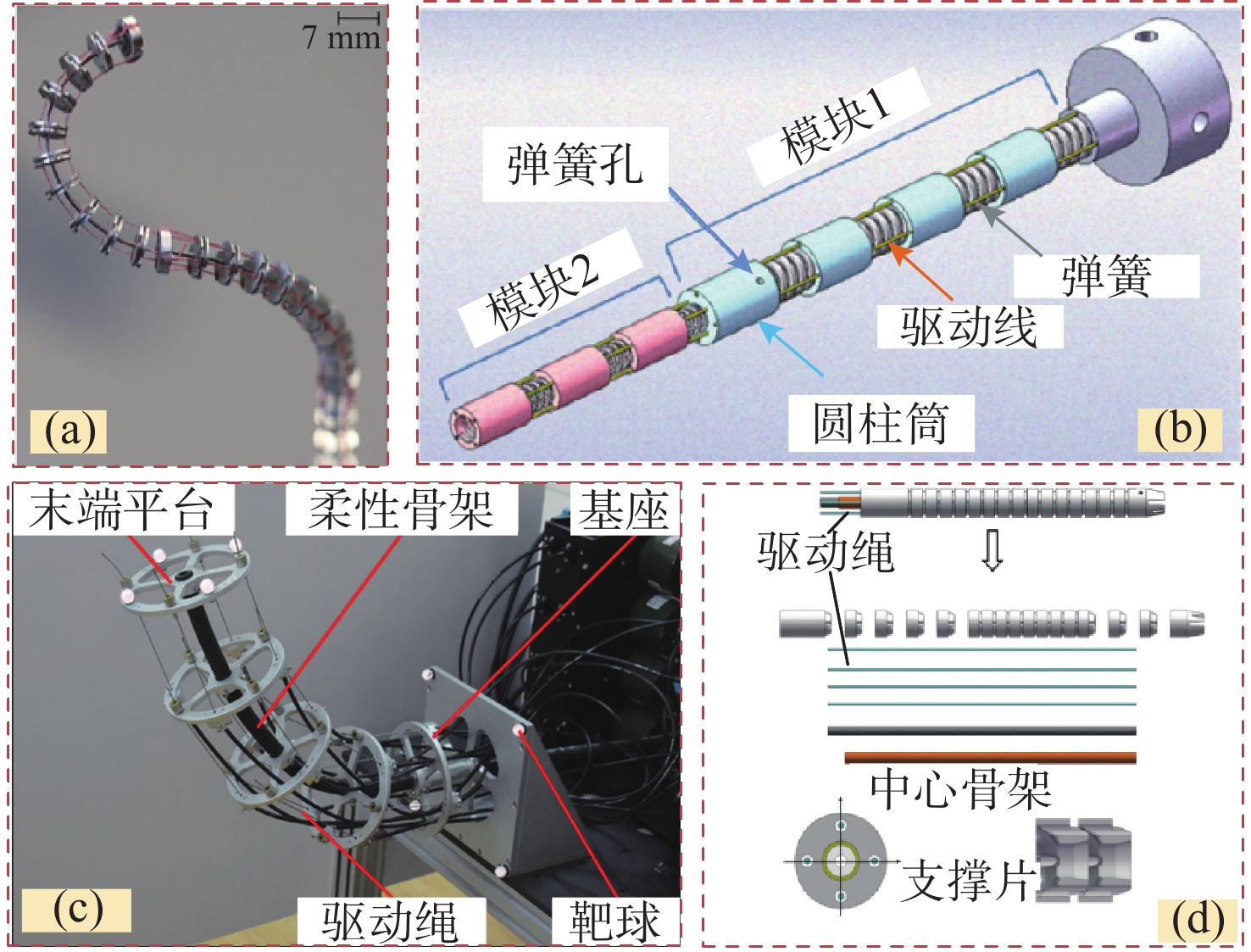
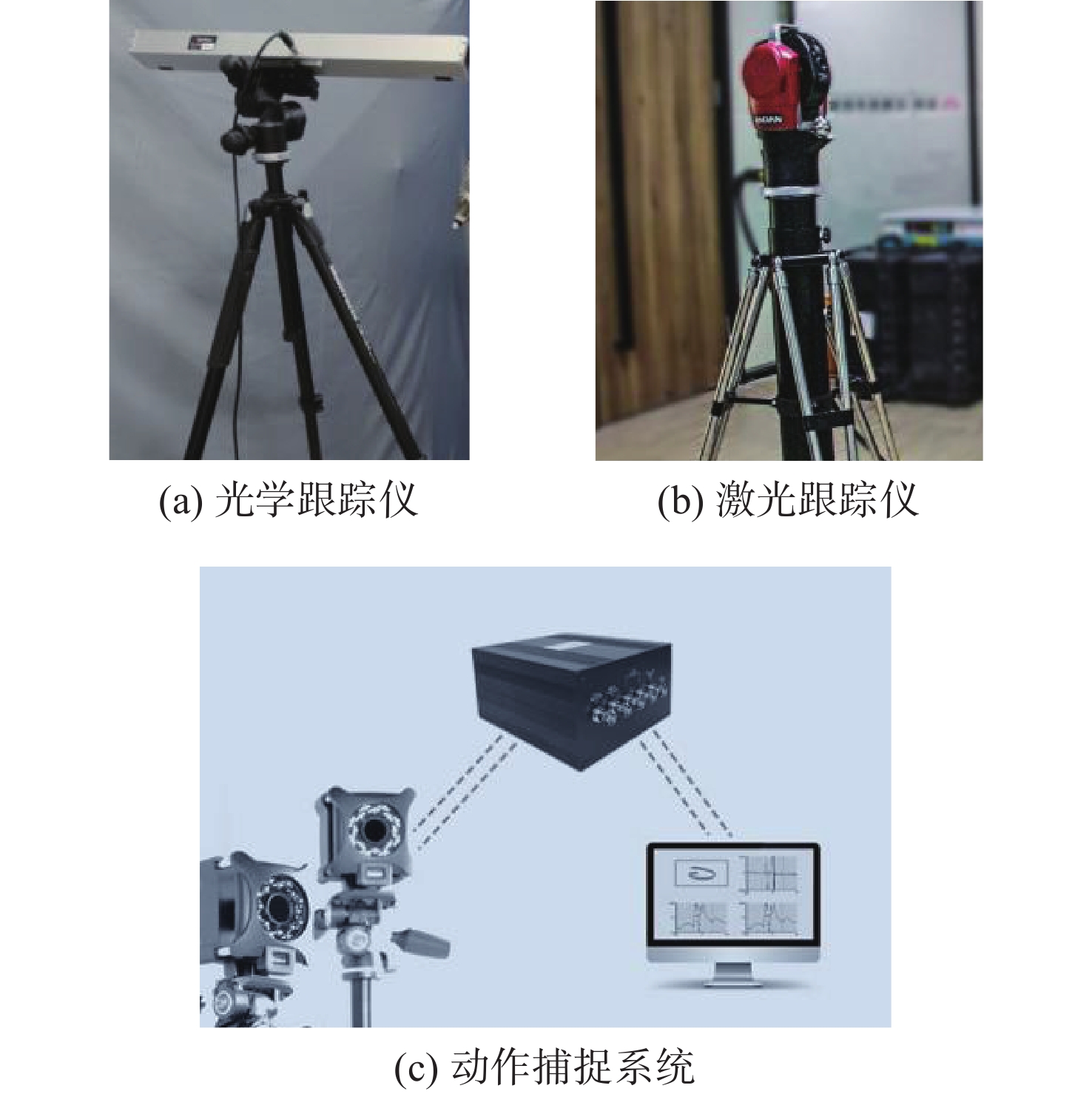
摘要: 针对水下狭小空间、多障碍的环境导致传统刚性机械臂作业能力受限的问题。具有细长结构特征的柔性机械臂逐渐成为解决此类特殊场景作业任务的研究重点。文中系统分析了柔性机械臂的发展现状: 首先综述了国内外柔性机械臂的结构设计形式及其优缺点; 然后围绕机械臂建模方法展开讨论, 包括基于几何结构的运动学建模方法、考虑了受力的动力学建模方法和无模型的建模方法; 随后, 梳理了当前柔性机械臂的形状和力感知方法, 主要包括基于外部传感器(尤其是光学和视觉方法)的形状感知方法,以及基于柔性传感器的触觉感知方法。此外, 阐述了柔性机械臂控制方法的最新研究进展, 分析了不同方法的优势和不足。最后, 讨论了柔性机械臂在水下环境中的应用潜力及典型案例, 分析了水下应用需要解决的关键问题, 并展望了后续研究方向,为柔性机械臂的技术优化与水下工程应用提供参考。Abstract: The constrained environments characterized by confined underwater spaces and multiple obstacles significantly limit the operational capabilities of traditional rigid manipulator. Flexible manipulator with slender structural profiles have increasingly become a research focus for completing operational tasks in such special scenarios. This paper systematically reviewed the current state of development in flexible manipulator. It began by summarizing the structural design of such manipulator developed domestically and internationally, highlighting their advantages and disadvantages. Then, modeling methodologies for these manipulator were discussed, including kinematics modeling based on geometric structures, dynamics modeling that accounts for force, and model-free approaches. Subsequently, this paper reviewed current methods for shape and force sensing in flexible manipulator, primarily focusing on external sensor-based techniques, especially optical and vision-based shape sensing, as well as tactile sensing methods utilizing flexible sensors. Furthermore, recent advances in control strategies for flexible manipulator were elaborated, examining the strengths and limitations of various approaches. Finally, this paper discussed the application potential and typical cases of flexible manipulator in underwater environments and analyzed the problems to be solved for underwater applications, along with prospects for future research directions, which provide a reference for the technical optimization of flexible manipulator and their application in underwater engineering.
-
Key words:
- flexible manipulator /
- structural design /
- modeling method /
- sensing method /
- control method /
- underwater application
-
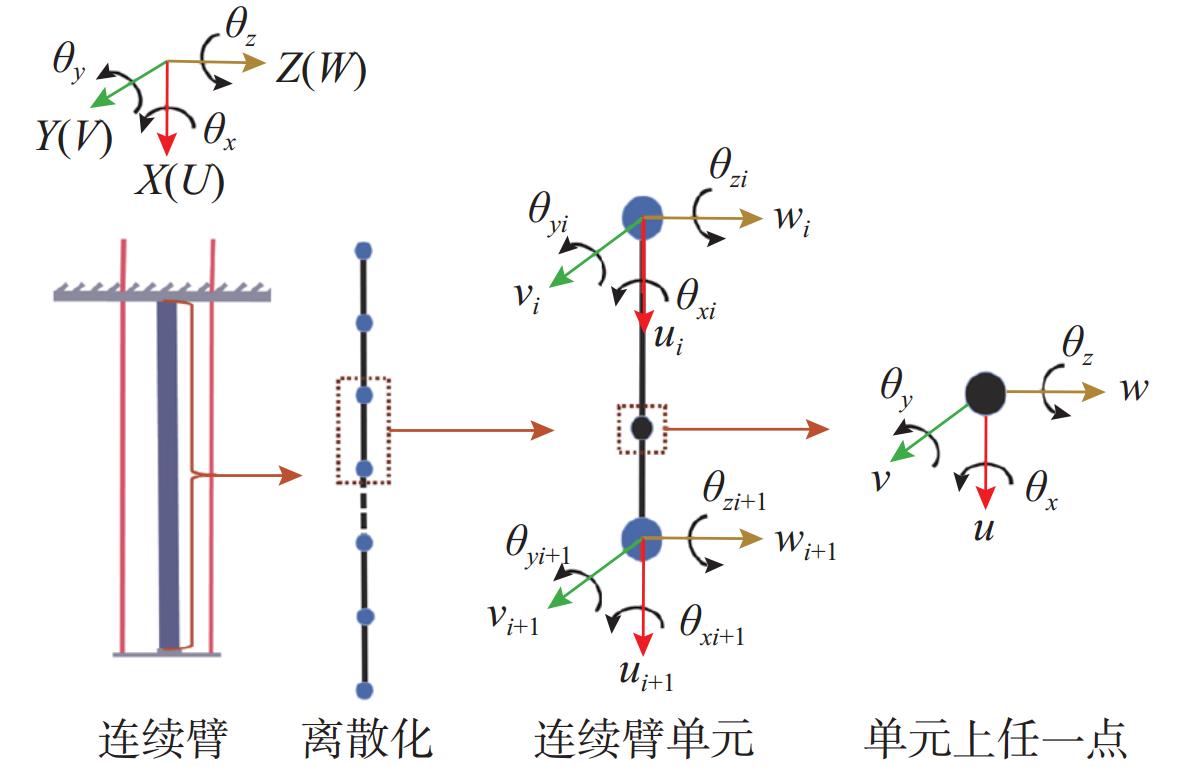
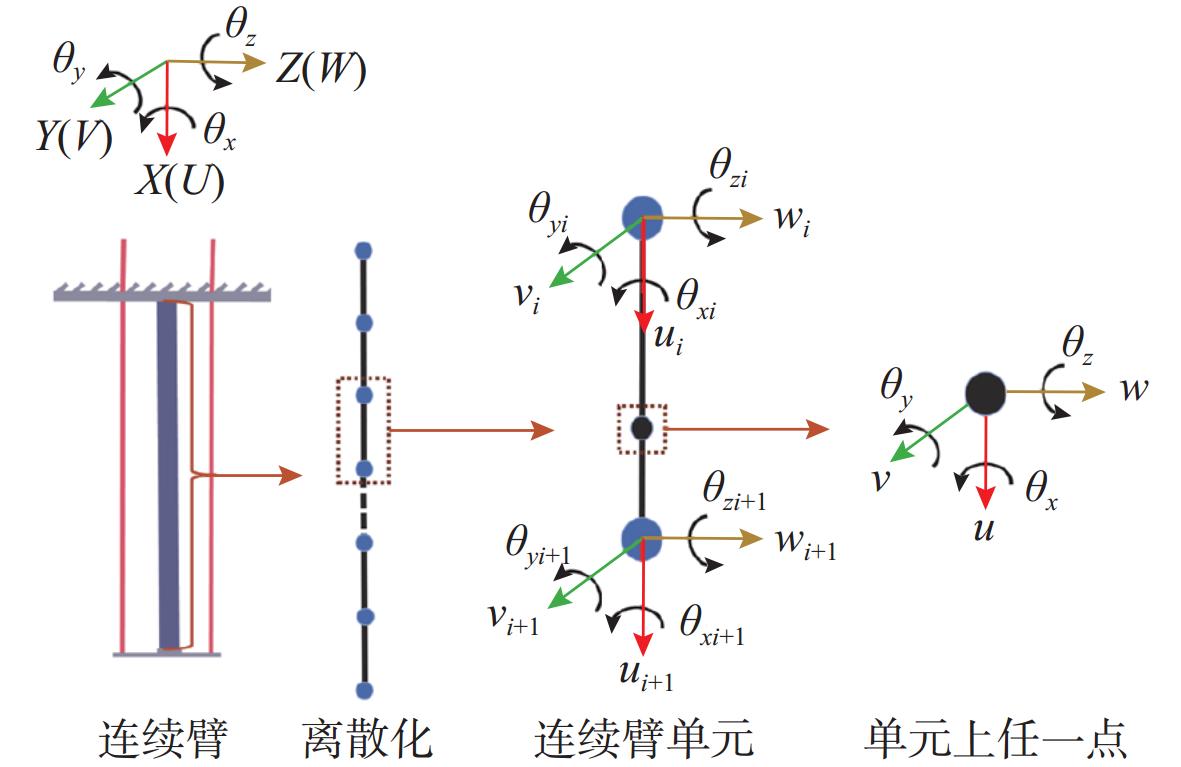
图 4 基于有限元法的柔性连续体机械臂建模
Figure 4. Modeling of flexible continuum manipulator based on finite element method
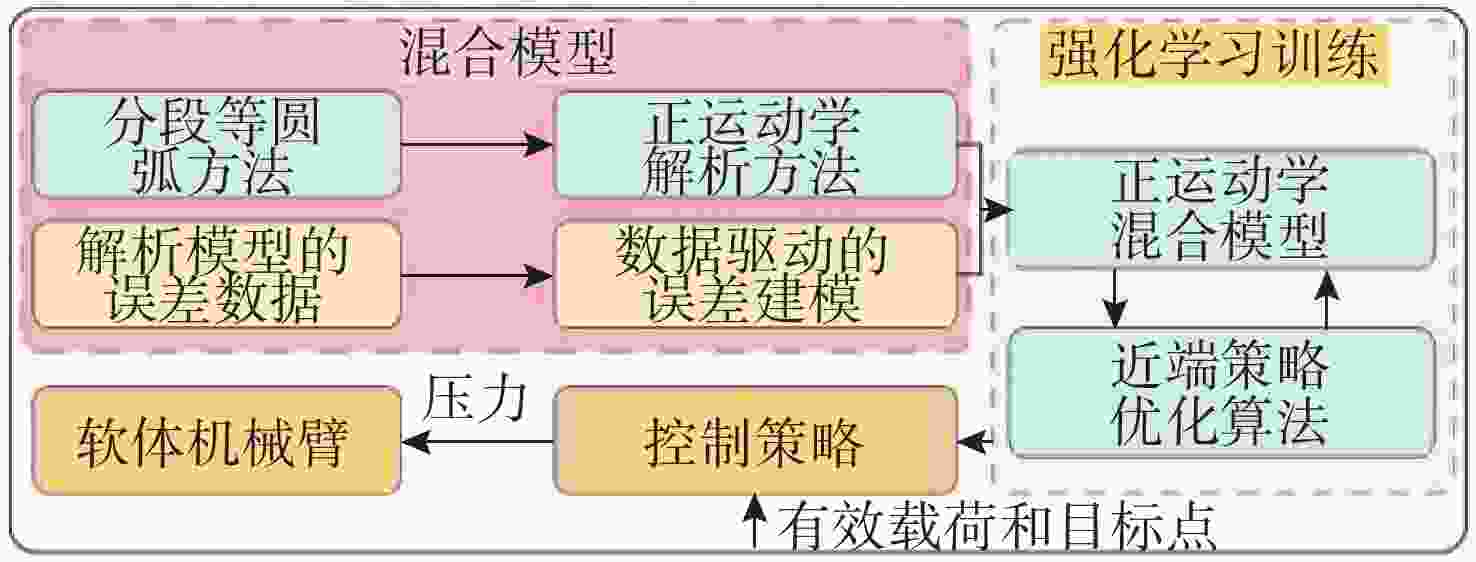
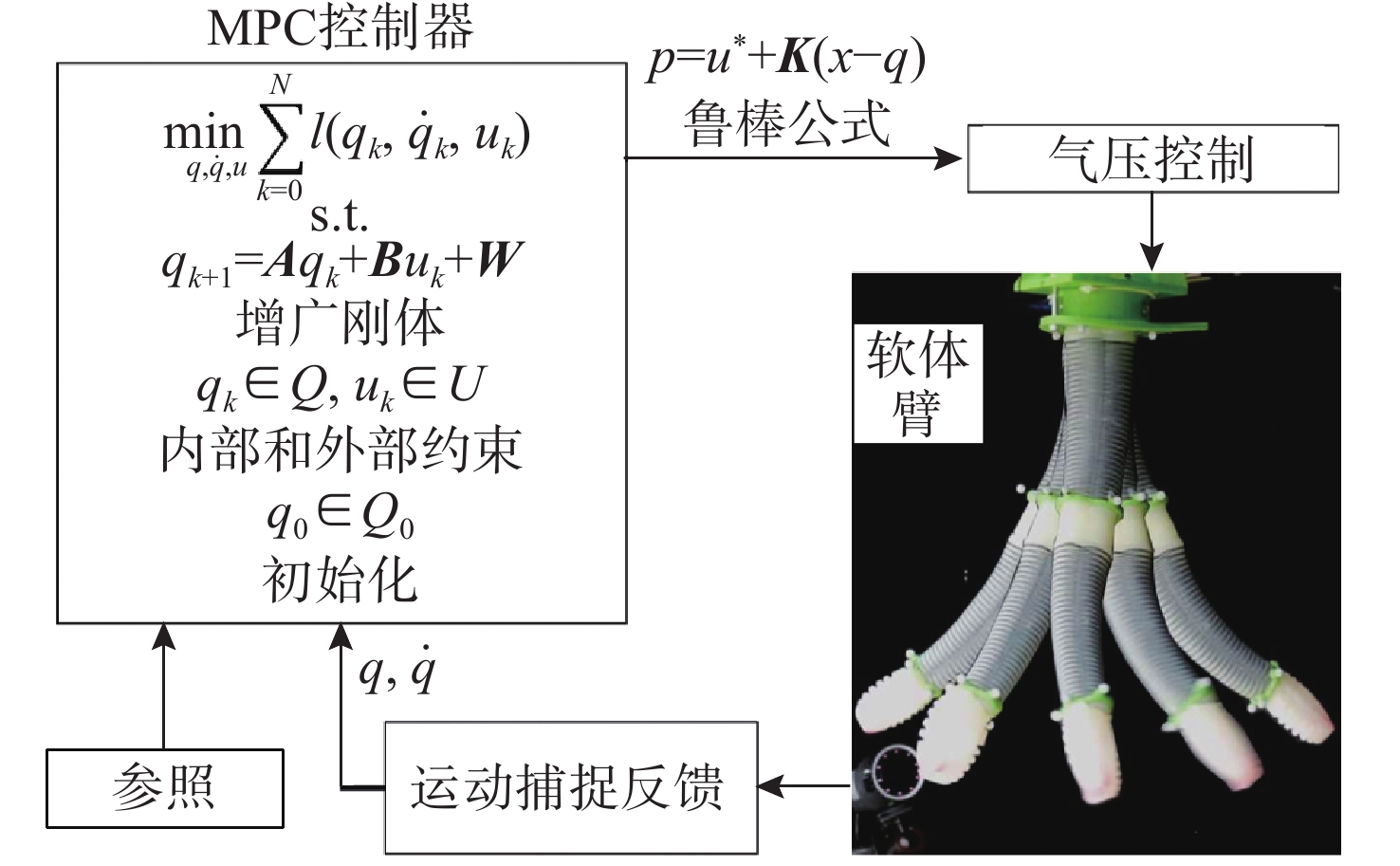
图 9 基于混合模型和强化学习的控制方法
Figure 9. Control method based on the hybrid modeling and reinforcement
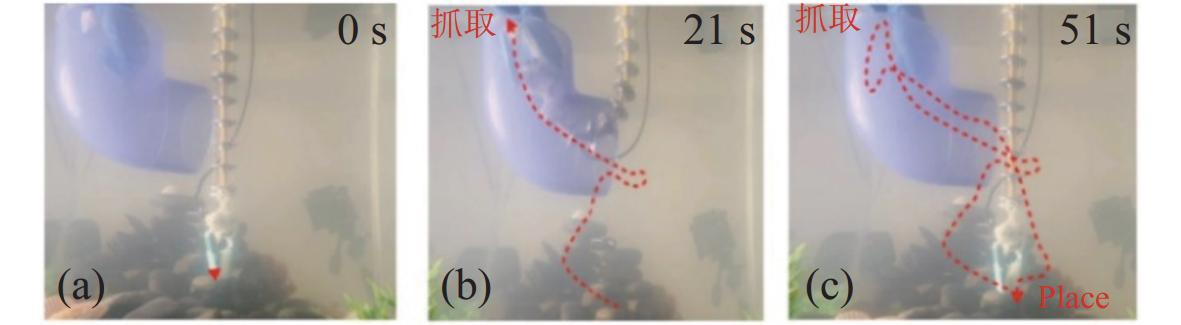
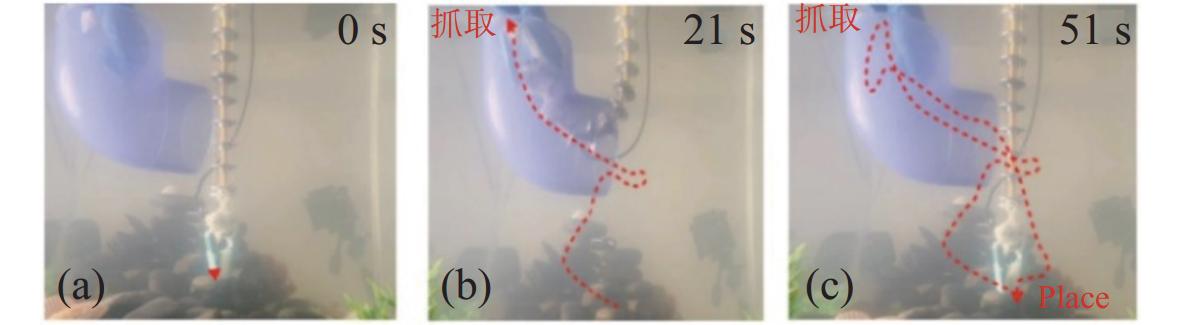
图 11 柔性机械臂水下L型管内抓取
Figure 11. Underwater grasping of the flexible manipulator in the L-shaped tube
表 1 不同类型柔性机械臂性能对比
Table 1. Comparison of performance of different types of flexible manipulator
评价指标 机械臂类型 气动臂 关节臂 连续臂 复杂度 中 高 低 精度 中 高 中 驱动数量 多 多 少 负载力 中 高 低 极端环境适应性 强 差 强  下载: 导出CSV
下载: 导出CSV
-
[1] HU Z, XU W, YANG T, et al. Coordinate grasp and operation planning for hybrid rigid flexible dual-arm space robot[J]. Journal of Astronautics, 2022, 43(10): 1311-1321. [2] CHIKHAOUI M T, BURGNER-KAHRS J. Control of continuum robots for medical applications: State of the art[C]//ACTUATOR 2018; 16th International Conference on New Actuators. Bremen, Germany: ACTUATOR, 2018: 1-11. [3] 牟宗高. 面向狭小空间作业的超冗余机器人轨迹规划及控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. [4] OLSON G, CHOW S, NICOLAI A, et al. A generalizable equilibrium model for bending soft arms with longitudinal actuators[J]. The International Journal of Robotics Research, 2019, 40: 147-177. [5] LIU Y G, YANG Y, PENG Y, et al. A light soft manipulator with continuously controllable stiffness actuated by a thin mckibben pneumatic artificial muscle[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(4): 1944-1952. doi: 10.1109/TMECH.2020.2993017 [6] KAPADIA A D, WALKER I, DAWSON D, et al. A model-based sliding mode controller for extensible continuum robots[C]//World Scientific and Engineering Academy and Society(WSEAS). Stevens Point, Wisconsin, USA: WSEAS, 2010: 113-120. [7] FESTO. Bionic grippers and soft robots[EB/OL]. (2025-01-01)[2025-08-12]. https://www.festo.com/us/en/e/about-festo/research-and-development/bionic-learning-network/bionic-grippers-and-soft-robots-id_33288/. [8] YI J, CHEN X, SONG C, et al. Customizable three-dimensional-printed origami soft robotic joint with effective behavior shaping for safe interactions[J]. IEEE Transactions on Robotics, 2019, 35(1): 114-123. doi: 10.1109/TRO.2018.2871440 [9] TALAS S K, BAYDERE B A, ALTINSOY T, et al. Design and development of a growing pneumatic soft robot[J]. Soft Robotics, 2020, 7(4): 521-533. doi: 10.1089/soro.2019.0083 [10] GE AEROSPACE. OC Robotics snake arm robot [EB/OL]. (2023-09-15)[2025-08-12]. https://www.geaerospace.com/commercial/services/engine-maintenance-technologies/. [11] BUCKINGHAM R, CHITRAKARAN V, CONKIE R, et al. Snake-arm robots: A new approach to aircraft assembly[C]//Aerospace Technology Conference and Exposition. Rohnert Park, California: SAE International, 2007. [12] SIASUN. 探龙系列蛇形臂机器人[EB/OL]. (2021-09-11)[2025-08-12]. https://www.siasun.com/article/493. html. [13] TANG L, WANG J, ZHENG Y, et al. Design of a cable-driven hyper-redundant robot with experimental validation[J]. International Journal of Advanced Robotic Systems, 2017, 14(5): 172988141773445. [14] QIN G, WU H, CHENG Y, et al. Adaptive trajectory control of an under-actuated snake robot[J]. Applied Mathematical Modelling, 2022, 106: 756-769. doi: 10.1016/j.apm.2022.02.001 [15] XU W, LIU T, LI Y. Kinematics, Dynamics, and control of a cable-driven hyper-redundant manipulator[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(4): 1693-1704. doi: 10.1109/TMECH.2018.2842141 [16] 刘天亮. 狭小空间作业绳驱分段联动机械臂运动规划与控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. [17] LI J, XU W, LI W, et al. Design and development of composite linkage mechanism for cable-driven segmented manipulator to increase synchronous accuracy and transmission distance[J]. IEEE Robotics and Automation Letters, 2023, 9: 25-32. [18] DAI Y C, LI X R, WANG X, et al. A novel cable-driven manipulator with constant-curvature deflections and equal displacements of the antagonistic cables[C]//The 15th International Conference on Intelligent Robotics and Applications(ICIRA). Harbin, China: ICIRA, 2022: 76-87. [19] AMANOV E, NGUYEN T D, BURGNER-KAHRS J. Tendon-driven continuum robots with extensible sections—A model-based evaluation of path-following motions[J]. The International Journal of Robotics Research, 2019, 40(1): 7-23. [20] YOON H S, YI B J. A 4-DOF flexible continuum robot using a spring backbone[C]//2009 International Conference on Mechatronics and Automation. Changchun, China: ICMA, 2009: 1249-1254 [21] SHEN W, YANG G, ZHENG T, et al. An accuracy enhancement method for a cable-driven continuum robot with a flexible backbone[J]. IEEE Access, 2020, 8: 37474-81. doi: 10.1109/ACCESS.2020.2975087 [22] LI Z, YU H, REN H, et al. A novel constrained tendon-driven serpentine manipulator[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Hamburg, Germany: IROS, 2015: 5966-5971. [23] GRAVAGNE I A, RAHN C D, WALKER I D. Large deflection dynamics and control for planar continuum robots[J]. IEEE/ASME Transactions on Mechatronics, 2003, 8(2): 299-307. doi: 10.1109/TMECH.2003.812829 [24] LIU T, MU Z, WANG H, et al. A cable-driven redundant spatial manipulator with improved stiffness and load capacity[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Madrid, Spain: IROS, 2018: 6628-6633. [25] LIU T, MU Z, XU W, et al. Improved mechanical design and simplified motion planning of hybrid active and passive cable-driven segmented manipulator with coupled motion[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Macau, China: IRSO, 2019: 5978-5983. [26] TANG S F, LI T T, WANG Q I, et al. Kinematic modeling and experimental verification of underdriven rigid-flex integrated manipulator[C]//2024 International Conference on Advanced Robotics and Mechatronics(ICARM). Tokyo, Japan: ICARM, 2024: 958-963. [27] WANG C, FRAZELLE C G, WAGNER J R, et al. Dynamic control of multisection three-dimensional continuum manipulators based on virtual discrete-jointed robot models[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 777-788. doi: 10.1109/TMECH.2020.2999847 [28] WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: A review[J]. The International Journal of Robotics Research, 2010, 29(13): 1661-1683. doi: 10.1177/0278364910368147 [29] LI Z, WU L, REN H, et al. Kinematic comparison of surgical tendon-driven manipulators and concentric tube manipulators[J]. Mechanism and Machine Theory, 2017, 107: 148-165. doi: 10.1016/j.mechmachtheory.2016.09.018 [30] CHIRIKJIAN G S, BURDICK J W. Kinematically optimal hyper-redundant manipulator configurations[J]. IEEE Transactions on Robotics and Automation, 1995, 11(6): 794-806. doi: 10.1109/70.478427 [31] SONG S, LI Z, YU H, et al. Shape reconstruction for wire-driven flexible robots based on Bézier curve and electromagnetic positioning[J]. Mechatronics, 2015, 29: 28-35. doi: 10.1016/j.mechatronics.2015.05.003 [32] DAI Y C, LI X R, WANG X, et al. Investigation on the shape reconstruction of cable-driven continuum manipulators considering super-large deflections and variable structures[C]//The 15th International Conference on Intelligent Robotics and Applications(ICIRA). Harbin, China: ICIRA, 2022: 183-194. [33] MBAKOP S, TAGNE G, CHEVILLON T, et al. PH-gauss-lobatto reduced-order-model for shape control of soft-continuum manipulators[J]. IEEE Transactions on Robotics, 2024, 40: 2641-2655. doi: 10.1109/TRO.2024.3391650 [34] JOSÉ L, ANA I P, PAULO C, et al.A fast and robust kinematic model for a 12 DoF hyper-redundant robot positioning: An optimization proposal[C]//International Conference of Numerical Analysis And Applied Mathematics(ICNAAM 2016). Rhodes, Greece: ICNAAM, 2016:270007. [35] BAYANI S, RASTEGARI R, SAMAVATI F C. Kinematic modeling of hyper redundant robot using ball screw mechanism approach[C]//2017 Artificial Intelligence and Robotics(IRANOPEN). Qazvin, Iran: IEEE, 2017: 17-22. [36] MOTAHARI A, ZOHOOR H, KORAYEM M H. A new motion planning method for discretely actuated hyper-redundant manipulators[J]. Robotica, 2017, 35(1): 101-118. doi: 10.1017/S0263574714002963 [37] KIM J, JIE W, KIM H, et al. Modified configuration control with potential field for inverse kinematic solution of redundant manipulator[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(4): 1782-1790. doi: 10.1109/TMECH.2021.3077914 [38] JING X, JIANG J, XIE F, et al. Continuum manipulator with rigid-flexible coupling structure[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 11386-11393. doi: 10.1109/LRA.2022.3199683 [39] ZHOU K, MAO B, ZHANG Y, et al. A cable-actuated soft manipulator for dexterous grasping based on deep reinforcement learning[J]. Advanced Intelligent Systems, 2024, 6(10): 2400112. doi: 10.1002/aisy.202400112 [40] TAN N, YU P, WANG X, et al. Behavior-predefined adaptive control for heterogeneous continuum robots[J]. The International Journal of Robotics Research, 2024, 44(1): 65-95. [41] YUAN H, ZHOU L, XU W. A comprehensive static model of cable-driven multi-section continuum robots considering friction effect[J]. Mechanism and Machine Theory, 2019, 135: 130-149. doi: 10.1016/j.mechmachtheory.2019.02.005 [42] YUAN H, LI Z, XU W. Kinetostatics for variable cross-section continuum manipulators[C]//2021 IEEE International Conference on Robotics and Automation(ICRA), Xi’an, China: ICRA, 2021: 11878-11883. [43] SU H J. A Pseudorigid-body 3R model for determining large deflection of cantilever beams subject to tip loads[J]. Journal of Mechanisms and Robotics, 2009, 1(2): 021008. doi: 10.1115/1.3046148 [44] HUANG S, MENG D, SHE Y, et al. Statics of continuum space manipulators with nonconstant curvature via pseudorigid-body 3R model[J]. IEEE Access, 2018, 6: 70854-70865. doi: 10.1109/ACCESS.2018.2881261 [45] HUANG S, MENG D, WANG X, et al. A 3D static modeling method and experimental verification of continuum robots based on pseudo-rigid body theory[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Macau, China: IROS, 2019: 4672-4677. [46] MODASSIR F M, DILIP P O, VADALI M. Finite element method-based dynamic modeling framework for flexible continuum manipulators[J]. Journal of Mechanisms and Robotics, 2024, 16(10): 1-12. [47] NI S, CHEN W, CHEN T. Dynamic modeling and analysis of multi-flexible-link space manipulators under time-varying dynamic boundary conditions[J]. Advances in Space Research, 2024, 74(10): 5224-5243. doi: 10.1016/j.asr.2024.07.067 [48] GUPTA N, PRATIHER B. Dynamic modeling and effective vibration reduction of dual-link flexible manipulators with two-stage cascade PID and active torque actuation[J]. Mechanism and Machine Theory, 2025, 205: 105867. doi: 10.1016/j.mechmachtheory.2024.105867 [49] HONG W, XIE L, LIU J, et al. Development of a novel continuum robotic system for maxillary sinus surgery[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1226-1237. doi: 10.1109/TMECH.2018.2818442 [50] PATERNÒ L, TORTORA G, MENCIASSI A. Hybrid soft-rigid actuators for minimally invasive surgery[J]. Soft Robotics, 2018, 5(6): 783-799. doi: 10.1089/soro.2017.0140 [51] FONTANELLI G A, BUONOCORE L R, FICUCIELLO F, et al. An external force sensing system for minimally invasive robotic surgery[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1543-1554. doi: 10.1109/TMECH.2020.2979027 [52] SONG J, MA J, TANG L, et al. Deformation measurement of drogue in wind tunnel test based on OptiTrack system[C]//2020 5th International Conference on Automation, Control and Robotics Engineering(CACRE). Dalian, China: CACRE, 2020: 565-569. [53] XU W, YAN P, WANG F, et al. Vision-based simultaneous measurement of manipulator configuration and target pose for an intelligent cable-driven robot[J]. Mechanical Systems and Signal Processing, 2022, 165: 108347. doi: 10.1016/j.ymssp.2021.108347 [54] CAMARILLO D B, LOEWKE K E, CARLSON C R, et al. Vision based 3-D shape sensing of flexible manipulators[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA: IEEE, 2008: 2940-2947. [55] GUGLIELMINO E, BRANSON D, SILVESTRI P. A bio-inspired flexible arm for subsea inspection: A water hydraulically actuated continuum manipulator[J]. Journal of Marine Science and Engineering, 2025, 13(4): 676. doi: 10.3390/jmse13040676 [56] WANG F, YAN L, LI J, et al. A configuration measurement method of cable-driven space manipulator by link equivalent center points recognition[C]//2022 IEEE International Conference on Robotics and Biomimetics(ROBIO). Jinghong, China: ROBIO, 2022: 999-1004. [57] PENG J, XU W, LIU T, et al. End-effector pose and arm-shape synchronous planning methods of a hyper-redundant manipulator for spacecraft repairing[J]. Mechanism and Machine Theory, 2021, 155: 104062. doi: 10.1016/j.mechmachtheory.2020.104062 [58] LU J, LIU F, GIRERD C, et al. Image-based pose estimation and shape reconstruction for robot manipulators and soft, continuum robots via differentiable rendering[EB/OL]. (2023-02-27)[2025-08-12].https://arxiv.org/abs/2302.14039. [59] LOBATON E J, FU J, TORRES L G, et al. Continuous shape estimation of continuum robots using X-ray images[C]//2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013: 725-732. [60] BOCTOR E M, CHOTI M A, BURDETTE E C, et al. Three-dimensional ultrasound-guided robotic needle placement: An experimental evaluation[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2008, 4(2): 180-191. [61] CHUNWOO K, DOYOUNG C, PETRISOR D, et al. Ultrasound probe and needle-guide calibration for robotic ultrasound scanning and needle targeting[J]. IEEE Transactions on Biomedical Engineering, 2013, 60(6): 1728-1734. doi: 10.1109/TBME.2013.2241430 [62] PARK Y L, ELAYAPERUMAL S, DANIEL B, et al. Real-time estimation of 3-D needle shape and deflection for MRI-guided interventions[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(6): 906-915. [63] ZHENG Y, WU B, CHEN Y, et al. Design and validation of cable-driven hyper-redundant manipulator with a closed-loop puller-follower controller[J]. Mechatronics, 2021, 78: 102605. doi: 10.1016/j.mechatronics.2021.102605 [64] WU B, ZENG L, ZHENG Y, et al. A closed-loop controller for cable-driven hyper-redundant manipulator with joint angle sensors[C]//2019 IEEE International Conference on Robotics and Biomimetics(ROBIO). Dali, China: ROBIO, 2019: 2433-2438. [65] CAO Y, LIU Z, YU H, et al. Spatial shape sensing of a multisection continuum robot with integrated DTG sensor for maxillary sinus surgery[J]. IEEE/ASME Transactions on Mechatronics, 2023, 28(2): 715-725. doi: 10.1109/TMECH.2022.3205604 [66] WALKER K L, CHEN H Y, PARTRIDGE A J, et al. Closed-loop control and disturbance mitigation of an underwater multi-segment continuum manipulator[EB/OL]. (2025-03-16)[2025-08-12]. https://arxiv.org/abs/2503.12508. [67] SITLER J L, WANG L. A modular open-source continuum manipulator for underwater remotely operated vehicles[J]. Journal of Mechanisms and Robotics, 2022, 14(6): 060906. doi: 10.1115/1.4054309 [68] SHEN W, HE J, YANG G, et al. Shape sensing and kinematic control of a cable-driven continuum robot based on stretchable capacitive sensors[J]. Sensors, 2024, 24(11): 3385. doi: 10.3390/s24113385 [69] OSMAN D, DU X, MINTON T, et al. Shape sensing for continuum robotics using optoelectronic sensors with convex reflectors[J]. Electronics, 2024, 13(7): 1253. doi: 10.3390/electronics13071253 [70] KIM B, HA J, PARK F C, et al. Optimizing curvature sensor placement for fast, accurate shape sensing of continuum robots[C]//2014 IEEE International Conference on Robotics and Automation(ICRA). Hong Kong, China: ICRA, 2014: 5374-5379. [71] RYU S C, DUPONT P E. FBG-based shape sensing tubes for continuum robots[C]//2014 IEEE International Conference on Robotics and Automation(ICRA). Hong Kong, China: IEEE, 2014: 3531-3537. [72] MOON H, JEONG J, OCKCHUL K, et al. FBG-based polymer-molded shape sensor integrated with minimally invasive surgical robots[C]//2015 IEEE International Conference on Robotics and Automation(ICRA). Seattle, WA, USA: IEEE, 2015: 1770-1775. [73] LU Y, CHEN W, CHEN Z, et al. FBG-Based variable-length estimation for shape sensing of extensible soft robotic manipulators[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Kyoto, Japan: IEEE, 2022: 1-8. [74] HEGDE C, SU J, TAN J M R, et al. Sensing in soft robotics[J]. ACS Nano, 2023, 17(16): 15277-15307. doi: 10.1021/acsnano.3c04089 [75] QU J, CUI G, LI Z, et al. Advanced flexible sensing technologies for soft robots[J]. Advanced Functional Materials, 2024, 34(29): 2401311. doi: 10.1002/adfm.202401311 [76] HASHIM A, AL-KHAFAJI Y, HADI A. Synthesis and characterization of flexible resistive humidity sensors based on PVA/PEO/CuO nanocomposites[J]. Transactions on Electrical and Electronic Materials, 2019, 20(6): 530-536. doi: 10.1007/s42341-019-00145-3 [77] ZHANG X, MADDIPATLA D, BOSE A K, et al. A pinted MWCNTs/PDMS based flexible resistive temperature detector[C]//2020 IEEE International Conference on Electro Information Technology(EIT). Chicago, IL, USA: EIT, 2020: 509-513. [78] XIA P, LIU P, WU S, et al. Highly stretchable and sensitive flexible resistive strain sensor based on waterborne polyurethane polymer for wearable electronics[J]. Composites Science and Technology, 2022, 221: 109355. doi: 10.1016/j.compscitech.2022.109355 [79] ZHANG L, ZHANG S, WANG C, et al. highly sensitive capacitive flexible pressure sensor based on a high-permittivity mxene nanocomposite and 3D network electrode for wearable electronics[J]. ACS Sensors, 2021, 6(7): 2630-2641. doi: 10.1021/acssensors.1c00484 [80] LI R, SI Y, ZHU Z, et al. Supercapacitive iontronic nanofabric sensing[J]. Advanced Materials, 2017, 29(36): 1700253. doi: 10.1002/adma.201700253 [81] CHA Y, SEO J, KIM J S, et al. Human–computer interface glove using flexible piezoelectric sensors[J]. Smart Materials and Structures, 2017, 26(5): 057002. doi: 10.1088/1361-665X/aa6b64 [82] WANG H S, HONG S K, HAN J H, et al. Biomimetic and flexible piezoelectric mobile acoustic sensors with multiresonant ultrathin structures for machine learning biometrics[J]. Science Advances, 2021, 7(7): 1-8. [83] YUE X, LU R, YANG Q, et al. Flexible wearable optical sensor based on optical microfiber bragg grating[J]. Journal of Lightwave Technology, 2023, 41(6): 1858-1864. doi: 10.1109/JLT.2022.3227186 [84] FAN F R, TIAN Z Q, LIN WANG Z. Flexible triboelectric generator[J]. Nano Energy, 2012, 1(2): 328-334. doi: 10.1016/j.nanoen.2012.01.004 [85] CHANG T H, TIAN Y, LI C, et al. Stretchable graphene pressure sensors with Shar-Pei-like hierarchical wrinkles for collision-aware surgical robotics[J]. ACS Applied Materials & Interfaces, 2019, 11(10): 10226-10236. [86] NOH Y, HAN S, GAWENDA P, et al. A contact force sensor based on S-shaped beams and optoelectronic sensors for flexible manipulators for minimally invasive surgery(MIS)[J]. IEEE Sensors Journal, 2020, 20(7): 3487-3495. doi: 10.1109/JSEN.2019.2945163 [87] GAO A, LIU N, SHEN M, et al. Laser-profiled continuum robot with integrated tension sensing for simultaneous shape and tip force estimation[J]. Soft Robotics, 2020, 7(4): 421-443. doi: 10.1089/soro.2019.0051 [88] GAO A, ZHOU Y, CAO L, et al. Fiber bragg grating-based triaxial force sensor with parallel flexure hinges[J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8215-8223. doi: 10.1109/TIE.2018.2798569 [89] SUN Y, CHEN T, LI D, et al. Stretchable, multiplexed, and bimodal sensing electronic armor for colonoscopic continuum robot enhanced by triboelectric artificial synapse[J]. Advanced Materials, 2025, 37(33): 2502203. doi: 10.1002/adma.202502203 [90] LIU W, DUO Y, LIU J, et al. Touchless interactive teaching of soft robots through flexible bimodal sensory interfaces[J]. Nature Communications, 2022, 13(1): 5030. doi: 10.1038/s41467-022-32702-5 [91] TANG J, ZHANG Y, HUANG F, et al. Design and kinematic control of the cable-driven hyper-redundant manipulator for potential underwater applications[J]. Applied Sciences, 2019, 9(6): 1142. doi: 10.3390/app9061142 [92] LIN B, XU W, LI W, et al. Ex situ sensing method for the end-effector’s six-dimensional force and link’s contact force of cable-driven redundant manipulators[J]. IEEE Transactions on Industrial Informatics, 2024, 20(5): 7995-8006. doi: 10.1109/TII.2024.3369248 [93] KAPADIA A, WALKER I D. Task-space control of extensible continuum manipulators[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, CA: IEEE, 2011: 1087-1092. [94] MAHVASH M, DUPONT P E. Stiffness control of surgical continuum manipulators[J]. IEEE Transactions on Robotics, 2011, 27(2): 334-345. doi: 10.1109/TRO.2011.2105410 [95] ZHANG L, GAO Y, MU Z, et al. A variable-stiffness planning method considering both the overall configuration and cable tension for hyper-redundant manipulators[J]. IEEE/ASME Transactions on Mechatronics, 2023, 29(1): 659-667. [96] SPINELLI F A, KATZSCHMANN R K. A unified and modular model predictive control framework for soft continuum manipulators under internal and external constraints[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Kyoto, Japan: IROS, 2022: 9393-9400. [97] BRAGANZA D, DAWSON D M, WALKER I D, et al. A neural network controller for continuum robots[J]. IEEE Transactions on Robotics, 2007, 23(6): 1270-1277. doi: 10.1109/TRO.2007.906248 [98] MELINGUI A, LAKHAL O, DAACHI B, et al. Adaptive neural network control of a compact bionic handling arm[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2862-2875. doi: 10.1109/TMECH.2015.2396114 [99] BERDICA U, JACKSON M, VERONESE N E, et al. Reinforcement learning controllers for soft robots using learned environments[C]//2024 IEEE 7th International Conference on Soft Robotics(RoboSoft). San Diego, CA, USA: IEEE, 2024: 933-939. [100] 吴妍. 受章鱼启发的线驱动柔性臂三维建模与DQN控制[D]. 浙江: 杭州电子科技大学, 2022. [101] BARJINI A H, KOLAGAR S A A, YAQUBI S, et al. Deep reinforcement learning-based motion planning and PDE control for flexible manipulators[J]. IEEE Robotics and Automation Letters, 2025, 10(9): 8634-8641. doi: 10.1109/LRA.2025.3588057 [102] ZHU J W, DONG Z Y, YANG Z J, et al. A new reinforcement learning fault-tolerant tracking control method with application to baxter robot[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(2): 1331-1341. doi: 10.1109/TMECH.2023.3309888 [103] LIU J, SONG Z, LU Y, et al. An underwater robotic system with a soft continuum manipulator for autonomous aquatic grasping[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(2): 1007-1018. doi: 10.1109/TMECH.2023.3321054 [104] VISWANADHAPALLI J K, ELUMALAI V K, SHIVRAM S, et al. Deep reinforcement learning with reward shaping for tracking control and vibration suppression of flexible link manipulator[J]. Applied Soft Computing, 2024, 152: 110756. doi: 10.1016/j.asoc.2023.110756 [105] LI Y, WANG X, KWOK K W. Towards adaptive continuous control of soft robotic manipulator using reinforcement learning[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Kyoto, Japan: IEEE, 2022: 7074-7081. [106] CENTURELLI A, ARLEO L, RIZZO A, et al. Closed-loop dynamic control of a soft manipulator using deep reinforcement learning[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4741-4748. doi: 10.1109/LRA.2022.3146903 [107] LOU G, WANG C, XU Z, et al. Controlling soft robotic arms using hybrid modelling and reinforcement learning[J]. IEEE Robotics and Automation Letters, 2024, 9(8): 7070-7077. doi: 10.1109/LRA.2024.3418312 [108] ZHANG X, YIN Y. Interactive simulation design of underwater operation manipulator of “Jiaolong”[J]. Ship & Ocean Engineering, 2018, 47(5): 105-109. [109] LI H, LI B, ZHANG K, et al. Design and application of operation and maintenance system for “Shen Hai Yong Shi” manned submersible[J]. Ship Science and Technology, 2022, 44(22): 182-185. [110] 杨农林, 茅及愚, 向忠祥. 国外水下作业机械手的特点及发展趋势[J]. 海洋科学, 1990, 6(6): 67-69. [111] KOCH J, LEICHTY J. Development of a robotic arm for mini-class ROV dexterous manipulation[C]//OCEANS 2019 MTS/IEEE Seattle. Seattle, WA, USA: IEEE, 2019: 1-5. [112] 吕荣贤, 陈巍, 郭铁铮, 等. 基于改进RRT算法的水下机械臂路径规划研究[J]. 工业控制计算机, 2025, 38(5): 83-86.LÜ R X, CHEN W, GUO T Z, et al. Path planning of underwater robotic arm based on improved RRT algorithm[J]. Industrial Control Computer, 2025, 38(5): 83-86. [113] XUE F, FAN Y, ZHANG X, et al. Kinematic control of a cable-driven snake-like manipulator for deep-water[J]. Journal of Mechanical & Electrical Engineering, 2023, 40(4): 522-529. [114] OCEANNEWS & TECHNOLOGY. Tentacle-like underwater robot to make offshore inspections safer and more precise[EB/OL]. (2025-09-03)[2025-09-08]. https://oceannews.com/news/subsea-and-survey/tentacle-like-underwater-robot-to-make-offshore-inspections-safer-and-more-precise/. [115] ROESTHUIS R J, MISRA S. Steering of multisegment continuum manipulators using rigid-link modeling and fbg-based shape sensing[J]. IEEE Transactions on Robotics, 2016, 32(2): 372-382. doi: 10.1109/TRO.2016.2527047 [116] ROESTHUIS R J, KEMP M, VAN D J J, et al. Three-dimensional needle shape reconstruction using an array of fiber bragg grating sensors[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(4): 1115-1126. doi: 10.1109/TMECH.2013.2269836 [117] LAI W, CAO L, LIU J, et al. A three-axial force sensor based on fiber bragg gratings for surgical robots[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(2): 777-789. doi: 10.1109/TMECH.2021.3071437 [118] 乔鑫宇. 空间仿生柔性机械臂动力学建模与控制研究[D]. 辽宁: 大连理工大学, 2023. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1260
- HTML全文浏览量: 314
- PDF下载量: 235
- 被引次数: 0