

Relative Localization Error Correction Method Based on SDP-Optimized Range Measurements
-
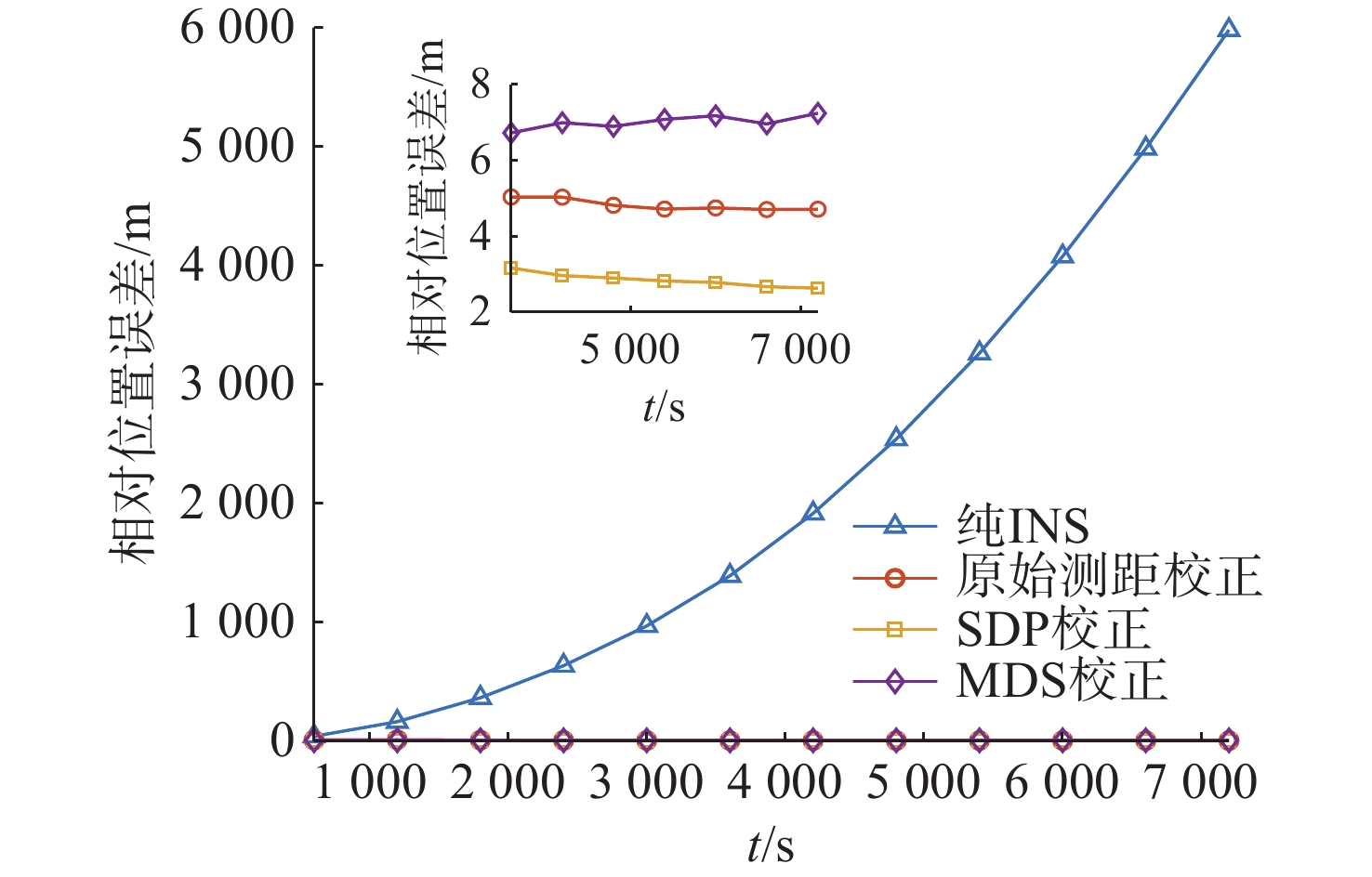
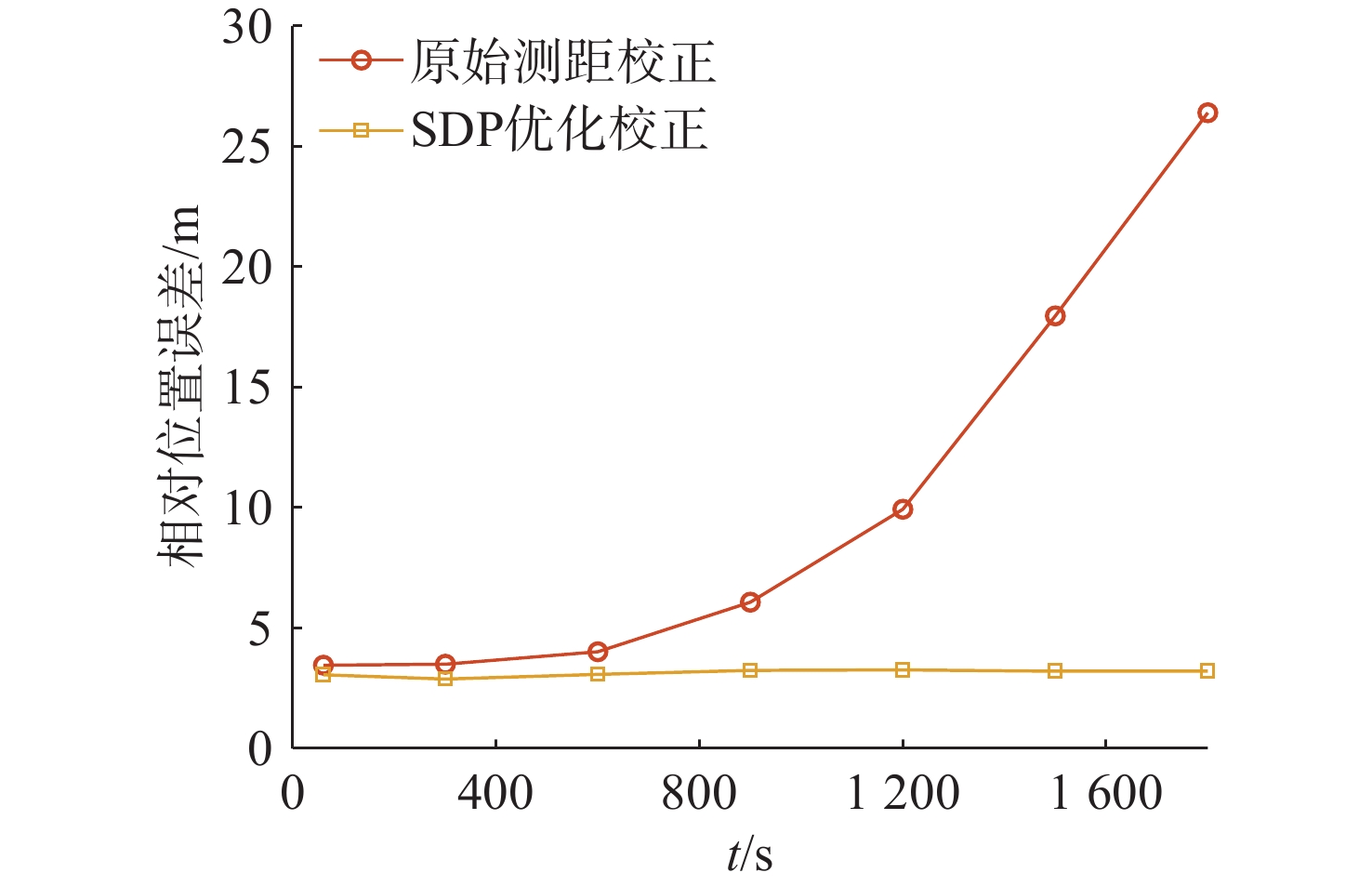
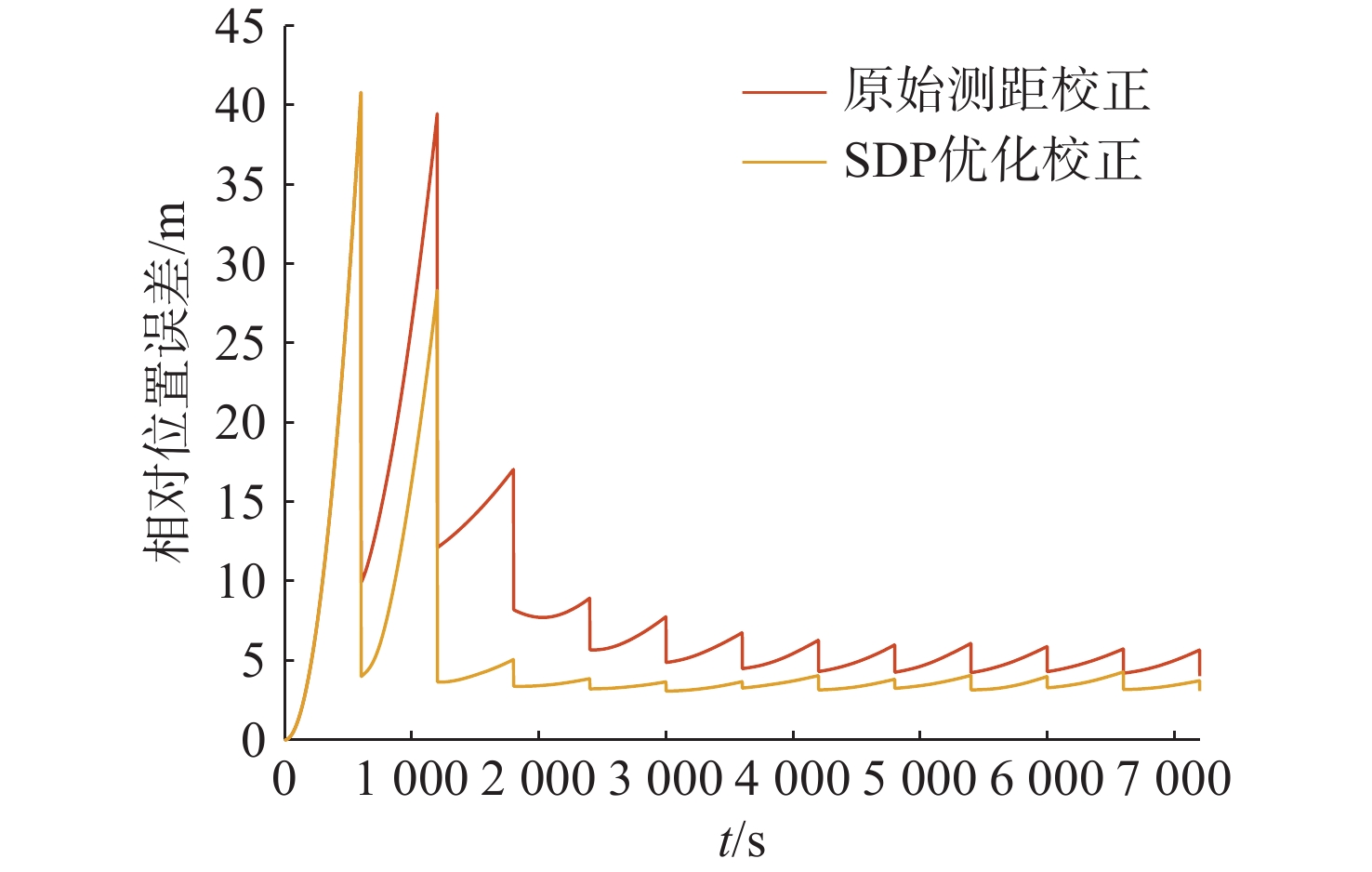
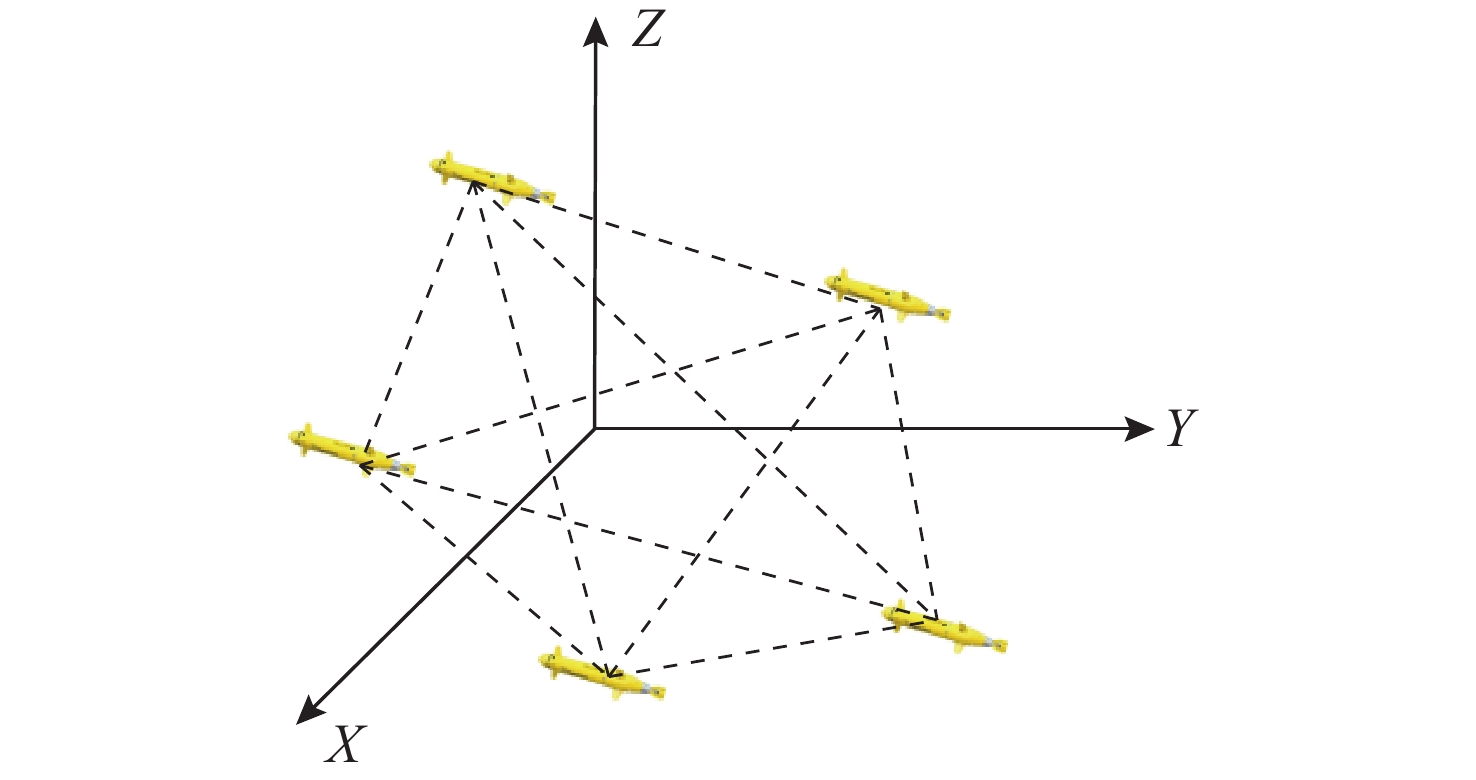
摘要: 现有集群协同定位研究多聚焦于绝对位置估计, 对节点间相对位置关系的关注较少。为简化测距模型并更直观地评估算法性能, 文中假定集群内部节点保持相对静止, 提出了一种基于半正定规划(SDP)优化测距的惯导误差校正方法。该方法在测距时刻对原始测距数据进行全局SDP优化后校正惯性导航系统(INS)的定位误差, 并对INS存在的固有偏差进行误差补偿更新, 有效提升了集群内节点的相对定位精度。文中构建了集群协同定位模型, 推导节点位置的非线性最小二乘解算公式, 并开展惯导误差补偿机理分析。多次仿真结果表明: 与直接采用原始测距数据进行惯导校正的方法相比, 所提方法可使相对定位误差平均降低40%以上; 且随着测距更新间隔的增大, 其在惯导误差抑制方面的技术优势愈发显著。Abstract: Most of the existing research on cooperative localization focuses on absolute position estimation, with relatively little attention paid to the relative positioning among nodes in clusters. To simplify the ranging model and provide a more intuitive evaluation of algorithm performance, this paper assumed that nodes within the cluster remain relatively stationary, and it proposed an inertial navigation system(INS) error correction method based on semi-definite programming(SDP)-optimized ranging. At the time of ranging, global SDP optimization was performed on the original ranging data to correct the positioning error of the corrected INS, followed by error compensation updates for the inherent biases of the INS, which effectively enhanced the relative positioning accuracy among the nodes. The paper established a cooperative localization model for the cluster, derived a nonlinear least squares formulation for node positioning, and provided an analysis of INS error compensation. Multiple simulation results indicate that compared with the method of directly using the original ranging data to correct the INS, the proposed method can reduce the relative positioning error by more than 40% on average, and its advantage in suppressing INS errors becomes even more pronounced as the ranging update interval increases.
-
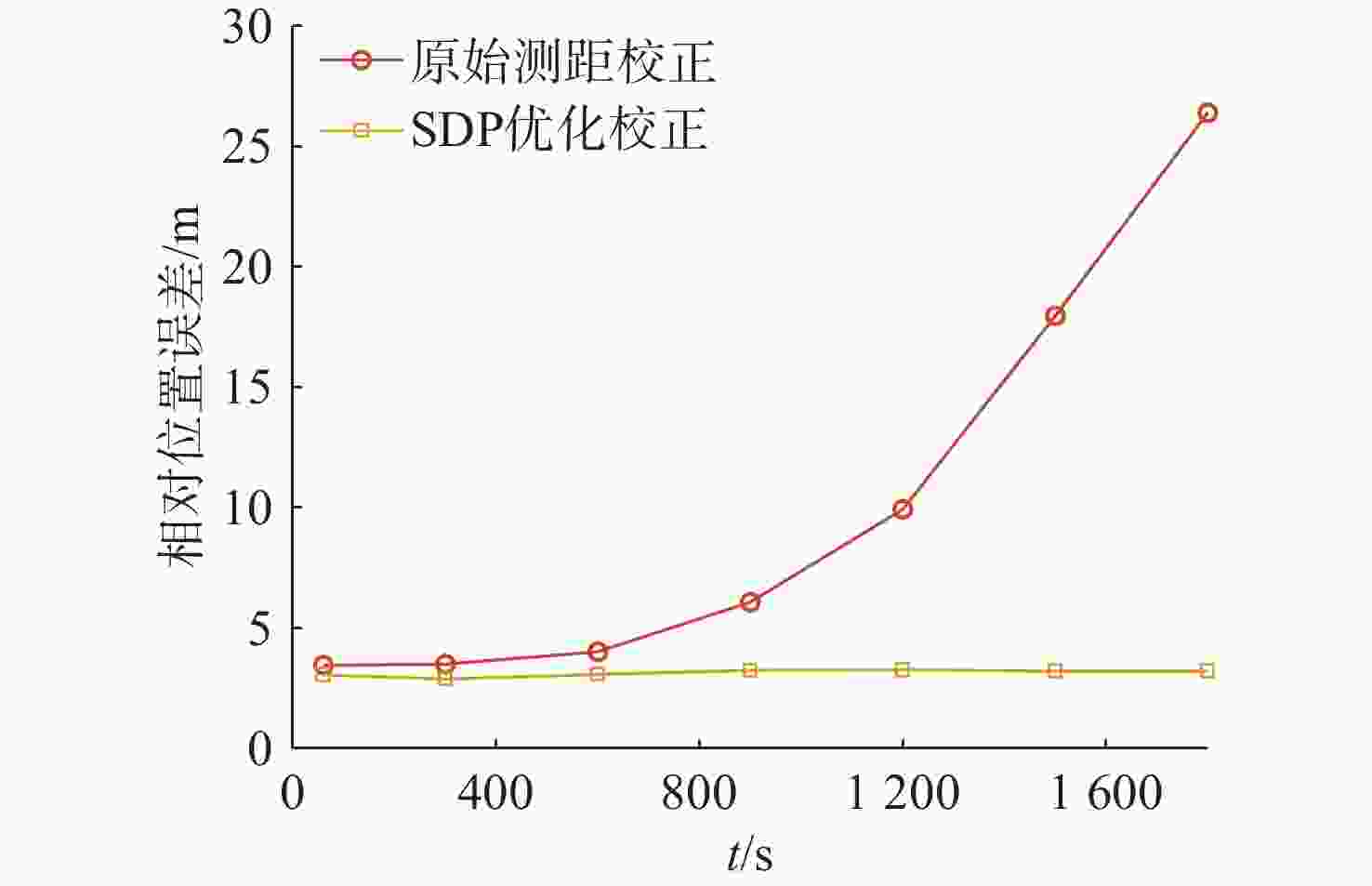
图 7 不同测距间隔下相对位置误差曲线
Figure 7. Relative position error curves under different ranging intervals
-
[1] 张世童, 张宏伟, 王延辉, 等. 自主水下航行器导航技术发展现状与分析[J]. 导航定位学报, 2020, 8(2): 1-7. doi: 10.3969/j.issn.2095-4999.2020.02.001ZHANG S T, ZHANG H W, WANG Y H, et al. Development status and analysis of navigation technology for autonomous underwater vehicles[J]. Journal of Navigation and Positioning, 2020, 8(2): 1-7. doi: 10.3969/j.issn.2095-4999.2020.02.001 [2] 钟宏伟, 李国良, 宋林桦, 等. 国外大型无人水下航行器发展综述[J]. 水下无人系统学报, 2018, 26(4): 273-282. doi: 10.11993/j.issn.2096-3920.2018.04.001ZHONG H W, LI G L, SONG L H, et al. Development of large displacement unmanned undersea vehicle in foreign countries: A review[J]. Journal of Unmanned Undersea Systems, 2018, 26(4): 273-282. doi: 10.11993/j.issn.2096-3920.2018.04.001 [3] 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297. doi: 10.11990/jheu.201909039ZHANG W, WANG N X, WEI S L, et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289-297. doi: 10.11990/jheu.201909039 [4] LI X, ZHU D. An adaptive SOM neural network method to distributed formation control of a group of AUVs[J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8260-8270. [5] 闫敬, 陈天明, 关新平, 等. 自主水下航行器协同控制研究现状与发展趋势[J]. 水下无人系统学报, 2023, 31(1): 108-120. doi: 10.11993/j.issn.2096-3920.2022-0096YAN J, CHEN T M, GUAN X P, et al. Autonomous undersea vehicle cooperative control: Current research status and development trends[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 108-120. doi: 10.11993/j.issn.2096-3920.2022-0096 [6] LI Y, YU W, GUAN X. Current-aided multiple-AUV cooperative localization and target tracking in anchor-free environments[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(3): 792-806. doi: 10.1109/JAS.2022.105989 [7] LI Y, YU W, GUAN X. Hybrid TOA-AOA cooperative localization for multiple AUVs in the absence of anchors[J]. IEEE Transactions on Industrial Informatics, 2024, 20(2): 2420-2431. doi: 10.1109/TII.2023.3266362 [8] 赵婧旭, 赵晨, 周锋. 基于主从式水下自主航行器移动组网的合作目标定位方法[J]. 电子与信息学报, 2022, 44(6): 1919-1926. doi: 10.11999/JEIT211359ZHAO J X, ZHAO C, ZHOU F. Cooperative target location method based on master-slave autonomous underwater vehicles mobile network[J]. Journal of Electronics & Information Technology, 2022, 44(6): 1919-1926. doi: 10.11999/JEIT211359 [9] 陈世杰, 刘锡祥, 黄永江, 等. 基于IMM算法的多AUV协同定位水声传播延迟处理方法[J]. 水下无人系统学报, 2023, 31(2): 259-268. doi: 10.11993/j.issn.2096-3920.202204011CHEN S J, LIU X X, HUANG Y J, et al. Treatment method for multi-AUV cooperative positioningunderwateracoustic propagation delay based on IMM algorithm[J]. Journal of Unmanned Undersea Systems, 2023, 31(2): 259-268. doi: 10.11993/j.issn.2096-3920.202204011 [10] 封飞翔. 多AUV协同导航误差分析与算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019. [11] ZHANG Z, LI Q, HAN L, et al. Consensus based strong tracking adaptive cubature Kalman filtering for nonlinear system distributed estimation[J]. IEEE Access, 2019, 7: 98820-98831. doi: 10.1109/ACCESS.2019.2929302 [12] 范世伟. 自主水下航行器协同定位算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. [13] JIANG L, LI Y, YU W, et al. Cooperative localization for asynchronous AUVs using time difference of communication in underwater anchor-free environments[J]. IEEE Transactions on Cybernetics, 2024, 54(11): 6531-6544. doi: 10.1109/TCYB.2024.3447121 [14] QIN Q, WANG G, HO K C. Underwater moving object localization by TOA and FOA modeled with isogradient sound speed profile[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 4627-4641. doi: 10.1109/TAES.2024.3509396 [15] PATWARI N, AGRAWAL P. Effects of correlated shadowing: connectivity, localization, and RF tomography[C]//Information Processing in Sensor Networks, IPSN’08. MO, USA: IEEE, 2008: 82-93. [16] 樊邦奎, 刘德康, 张瑞雨, 等. 大规模无人机集群通信定位一体化技术[J]. 信号处理, 2024, 40(1): 7-16. doi: 10.16798/j.issn.1003-0530.2024.01.001FAN B K, LIU D K, ZHANG R Y, et al. Integrated technology of communication and positioning in large-scale UAV clusters[J]. Journal of Signal Processing, 2024, 40(1): 7-16. doi: 10.16798/j.issn.1003-0530.2024.01.001 [17] DOKMANIĆ I, PARHIZKAR R, RANIERI J, et al. Euclidean distance matrices: A short walk through theory, algorithms and applications[J]. IEEE Signal Processing Magazine, 2015, 32(6): 12-30. doi: 10.1109/MSP.2015.2398954 [18] LIU Y, WANG Y, WANG J, et al. Distributed 3D relative localization of UAVs[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 11756-11770. doi: 10.1109/TVT.2020.3017162 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 444
- HTML全文浏览量: 163
- PDF下载量: 97
- 被引次数: 0
图(8)




