Horizontal Trajectory Tracking Control of Underactuated AUV Backstepping Sliding Mode Based on RBF Neural Network
-
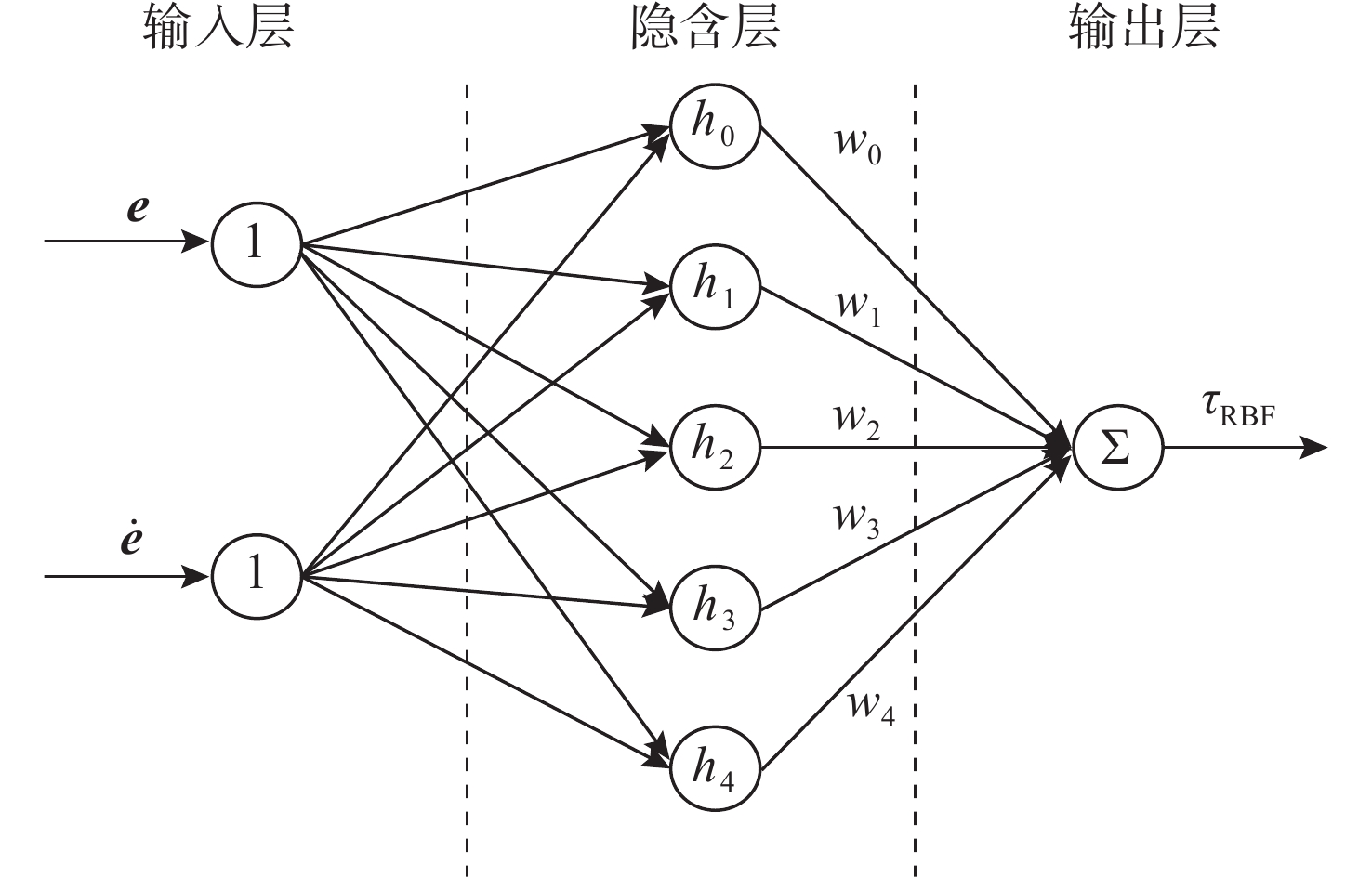
摘要: 针对欠驱动自主水下航行器(AUV)在复杂海洋环境中水平面轨迹跟踪控制难度大、抗干扰能力弱的问题, 提出一种基于径向基函数(RBF)神经网络的欠驱动AUV反步积分滑模控制(BISMC)轨迹跟踪控制方法。首先, 运用反步控制方法设计运动学控制器, 得到虚拟控制律和实际控制输入; 其次, 在动力学控制器中, 引入积分滑模控制, 考虑系统的不确定因素及可能存在的外部干扰, 同时引入RBF神经网络在线逼近系统未知非线性项, 有效解决传统滑模控制中抖振效应与参数不确定性之间的矛盾; 最后, 将误差作为RBF神经网络的输入, 将RBF神经网络的输出作为切换控制, 从而实现滑模控制律的在线调整。仿真结果表明: 通过与传统的反步滑模控制进行比较, 文中方法可有效消除传统滑模控制中切换项引起的抖振问题, 使系统具有良好的鲁棒性。Abstract: A backstepping integral sliding mode control(BISMC) trajectory tracking control method for underactuated autonomous undersea vehicle(AUV) based on radial basis function(RBF) neural network was proposed to address the challenges of difficult horizontal trajectory tracking control and weak anti-interference ability in complex marine environments. Firstly, a kinematic controller was designed by employing the backstepping control method to obtain virtual control laws and actual control inputs. In the dynamic controller, integral sliding mode control was introduced to account for the uncertainty factors and possible external disturbances of the system. Meanwhile, an RBF neural network was adopted to approximate the unknown nonlinear terms of the system online, effectively resolving the contradiction between the chattering effect and parameter uncertainty in traditional sliding mode control. By taking the error as the input of the RBF neural network and using the output of the RBF neural network as the switching control, the online adjustment of the sliding mode control law was achieved. The simulation results show that compared with the traditional BISMC, the proposed method can effectively eliminate the chattering problem caused by the switching terms in traditional sliding mode control, enabling the system to exhibit strong robustness.
-
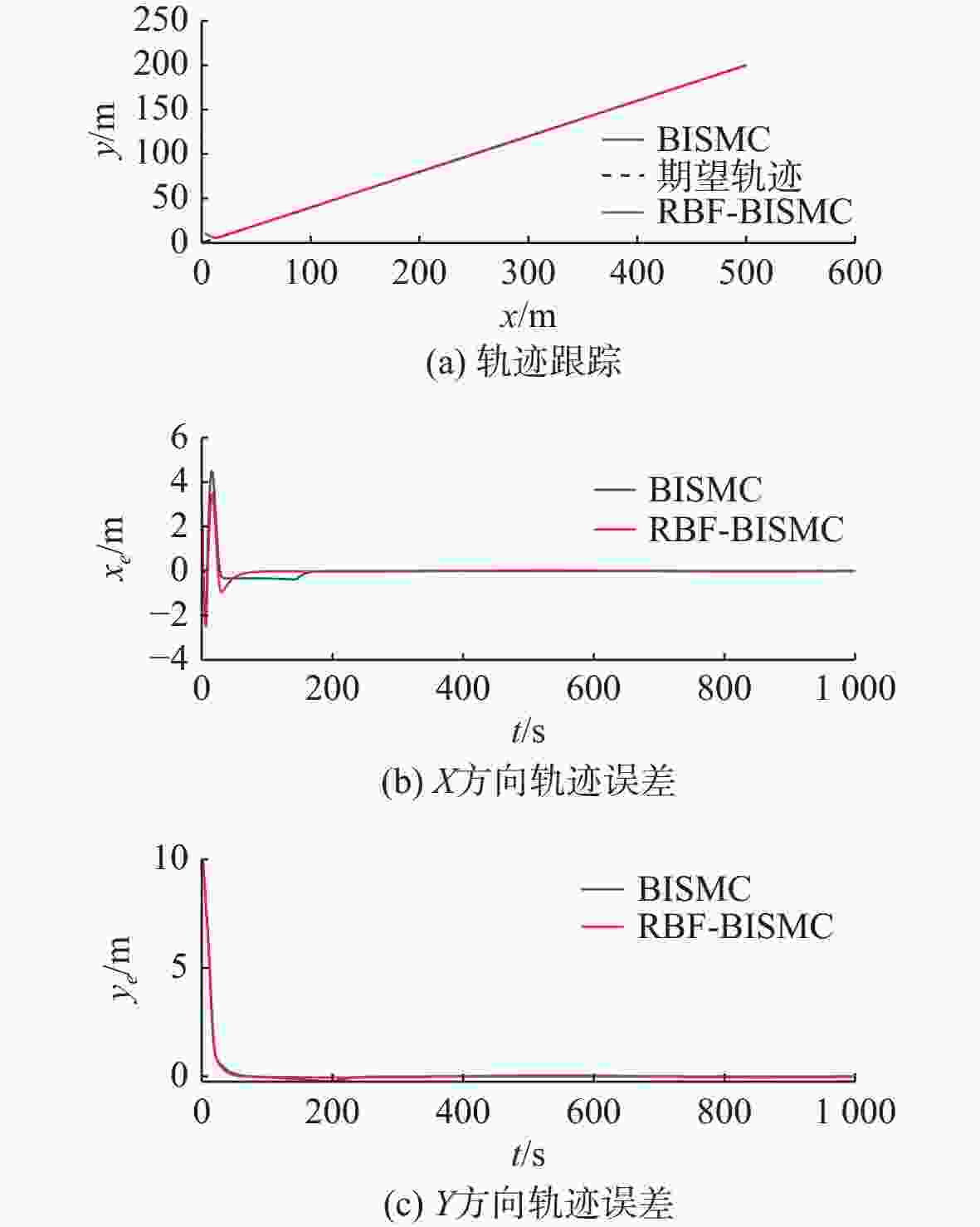
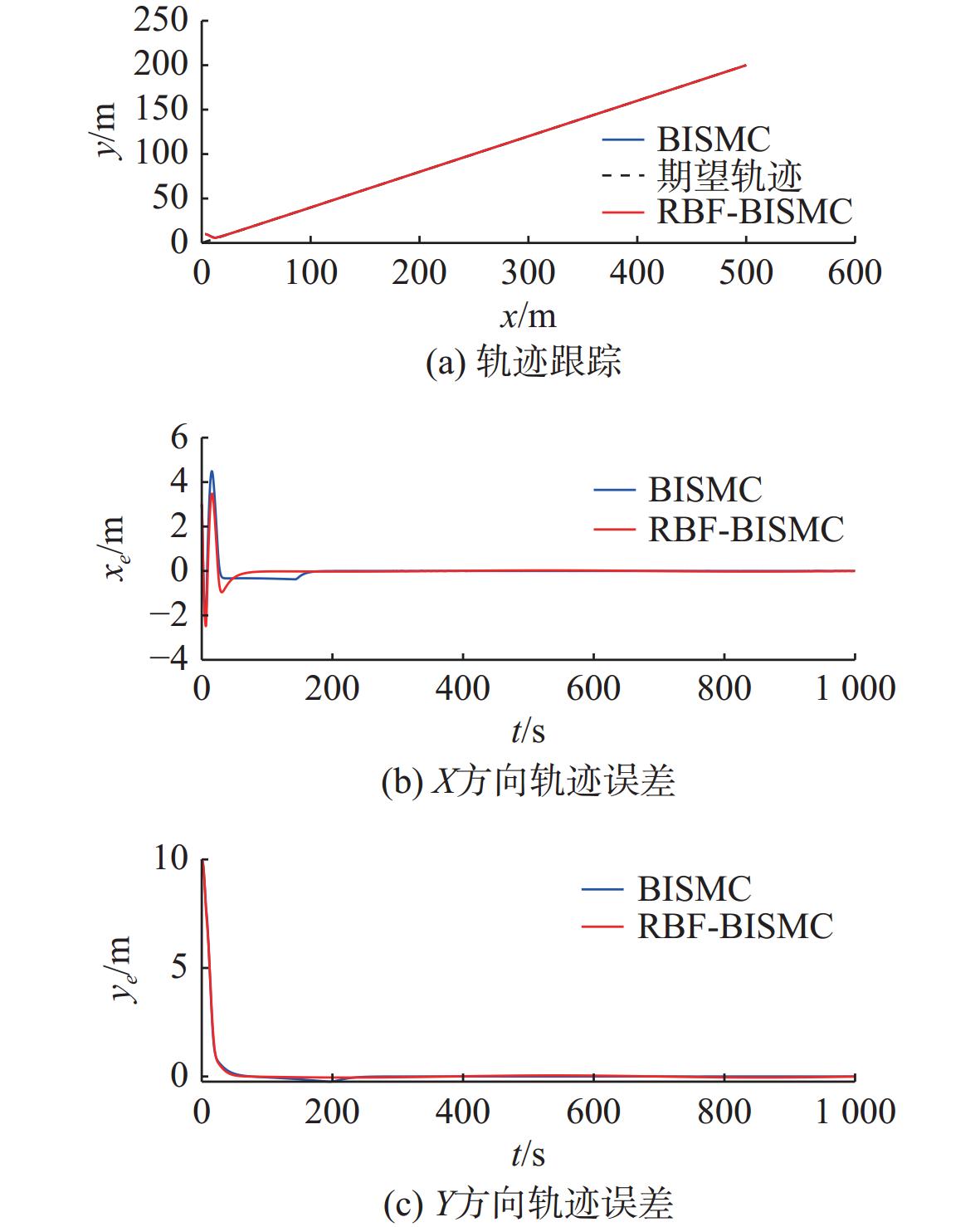
图 3 BISMC与RBF-BISMC控制下直线轨迹跟踪对比
Figure 3. Comparison of linear trajectory tracking under BISMC and RBF-BISMC control
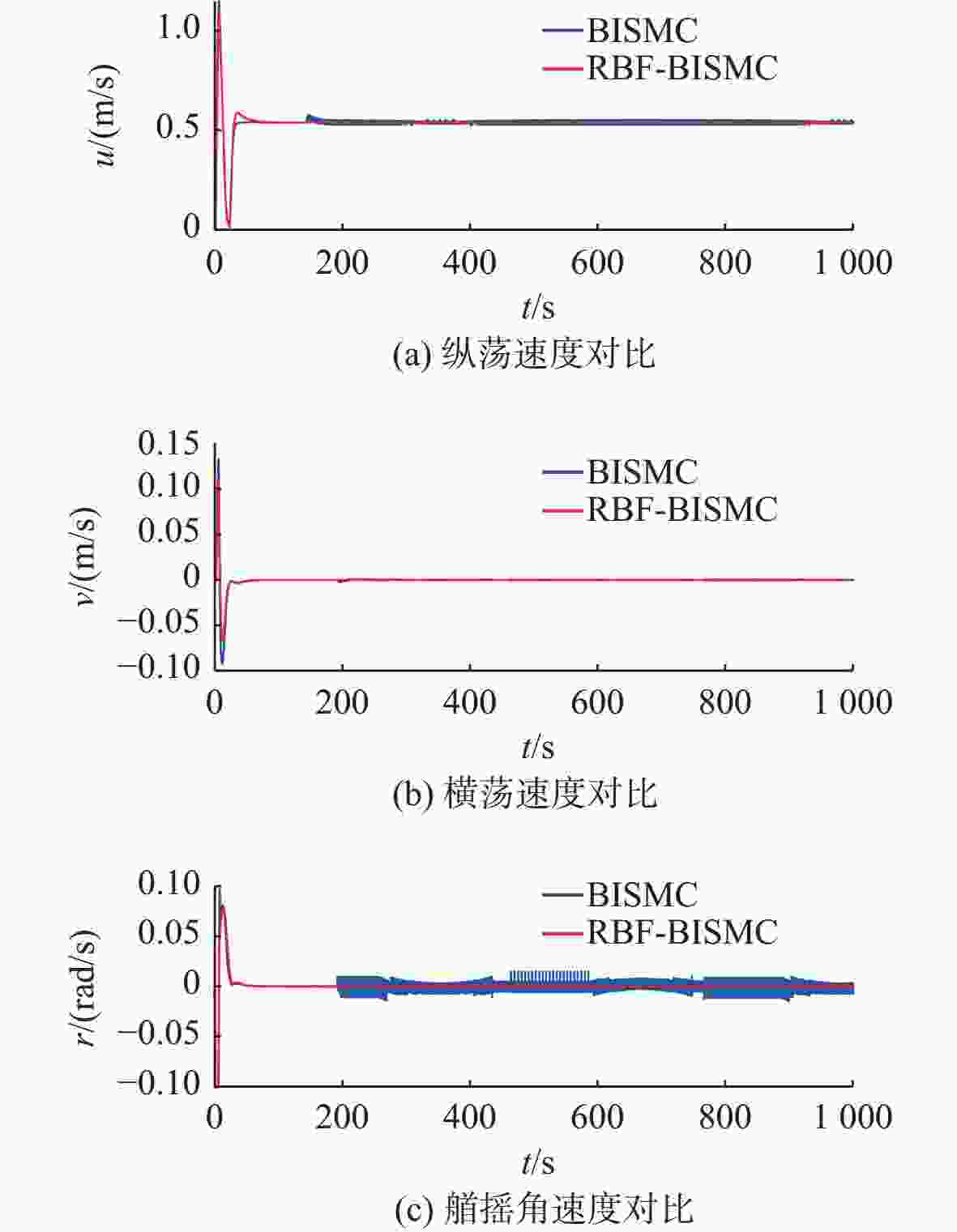
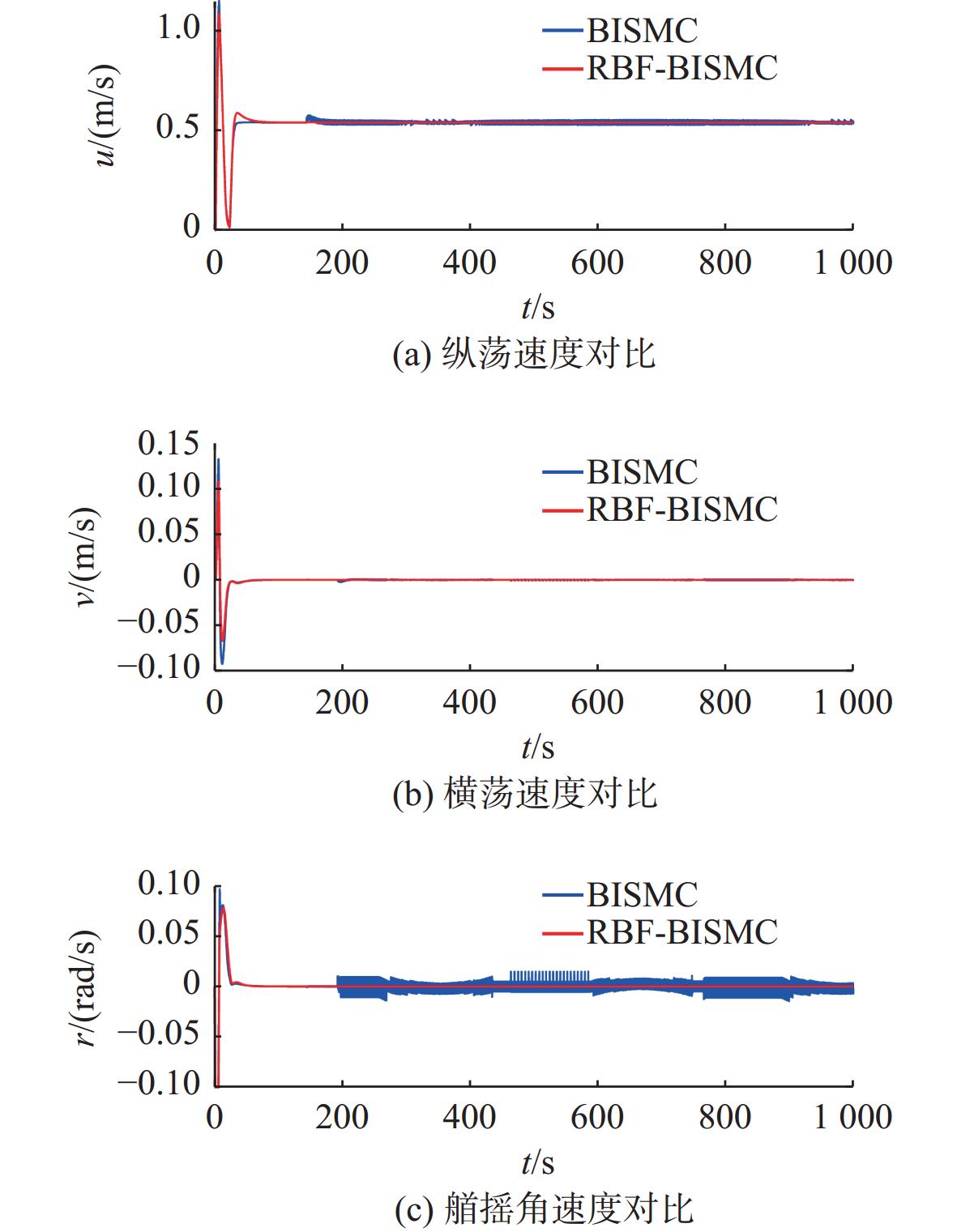
图 4 BISMC与RBF-BISMC控制下直线速度跟踪对比
Figure 4. Comparison of linear velocity tracking under BISMC and RBF-BISMC control
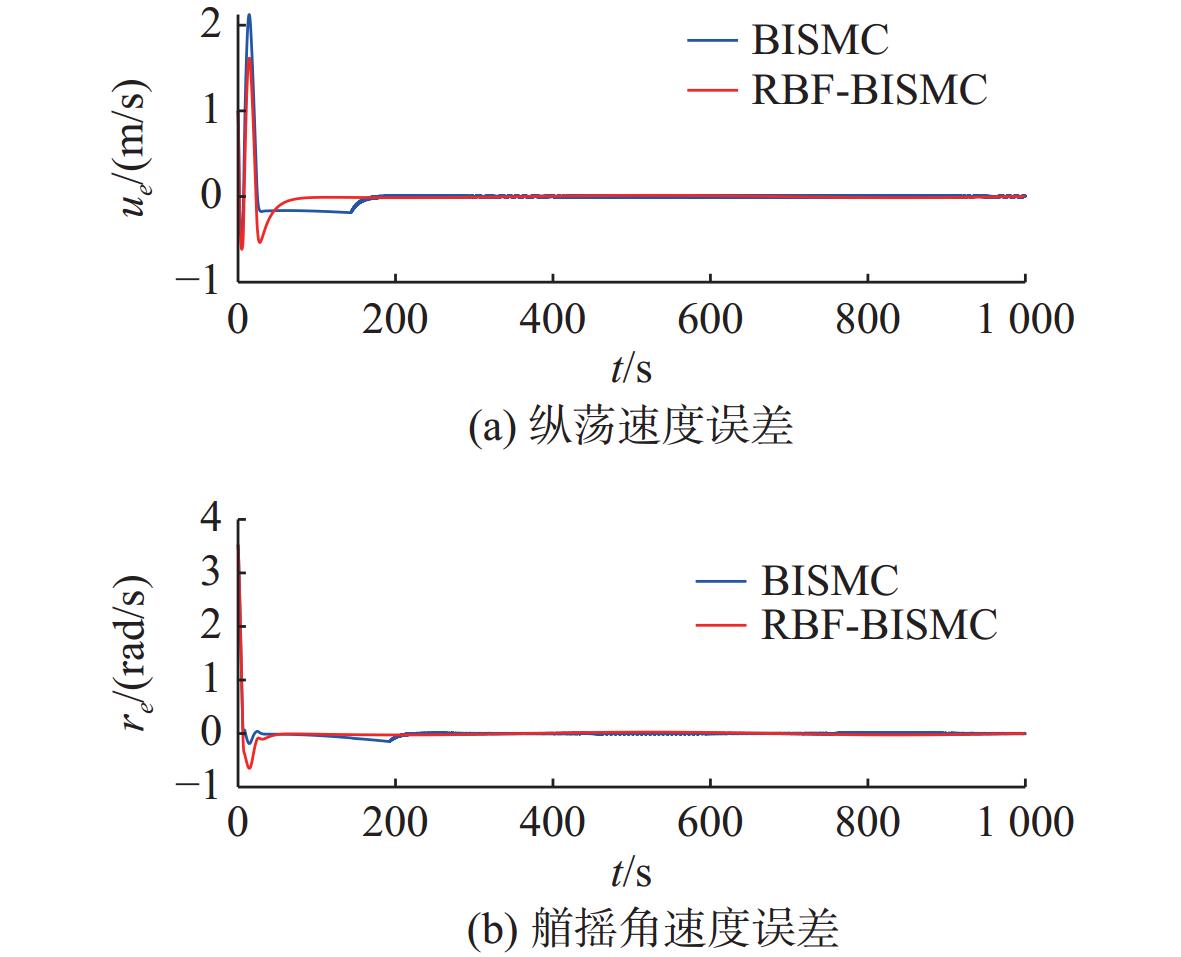
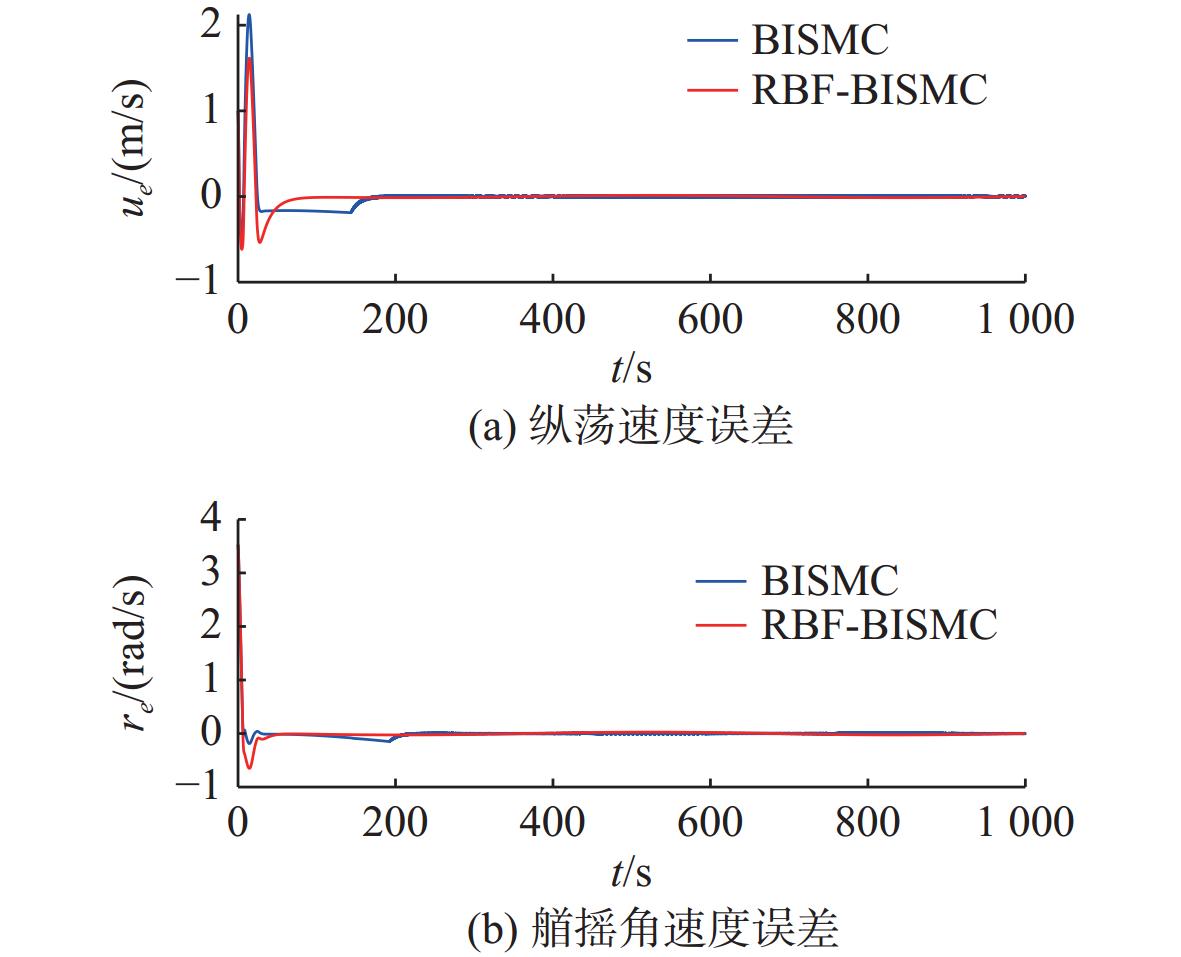
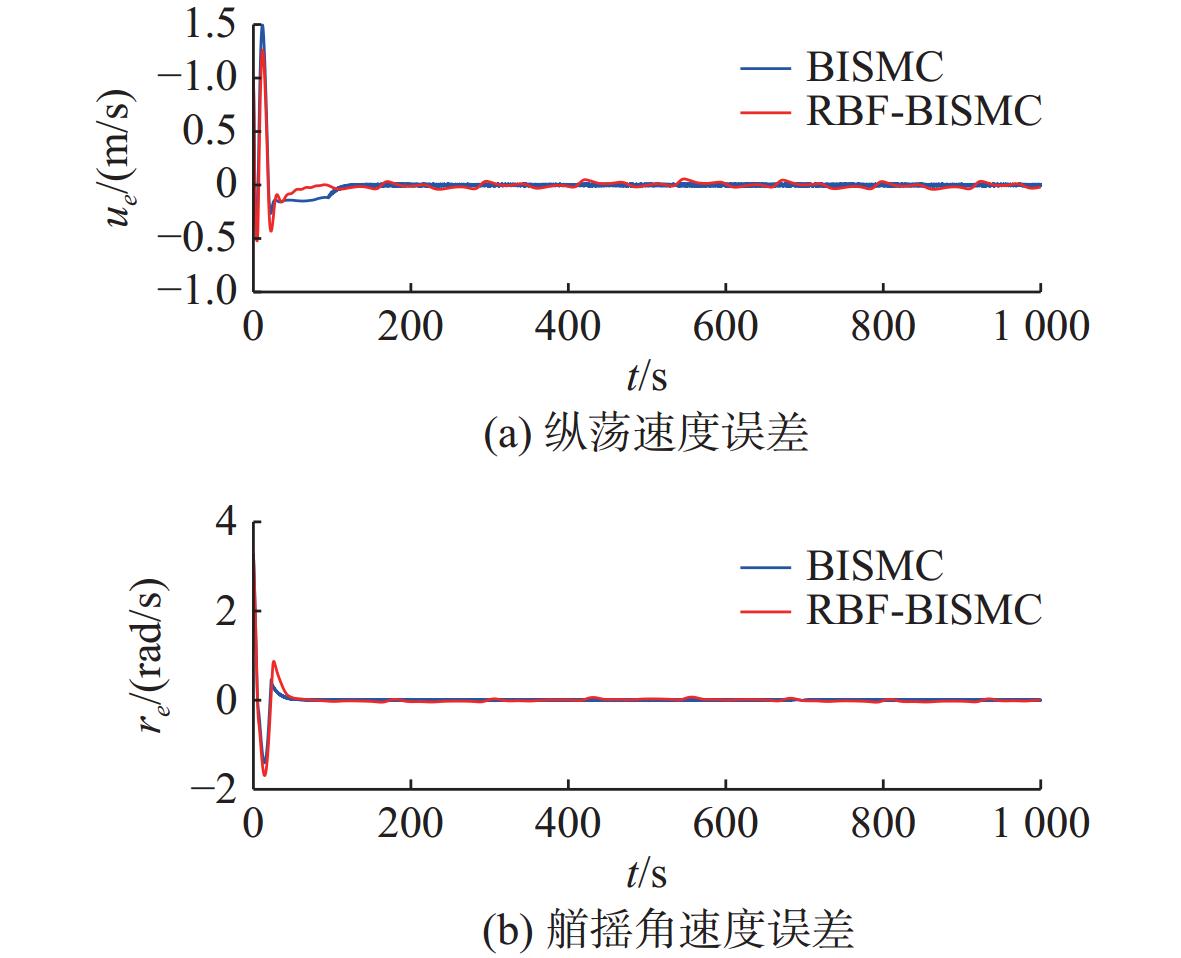
图 5 BISMC与RBF-BISMC控制下速度误差跟踪对比
Figure 5. Comparison of speed error tracking under BISMC and RBF-BISMC control
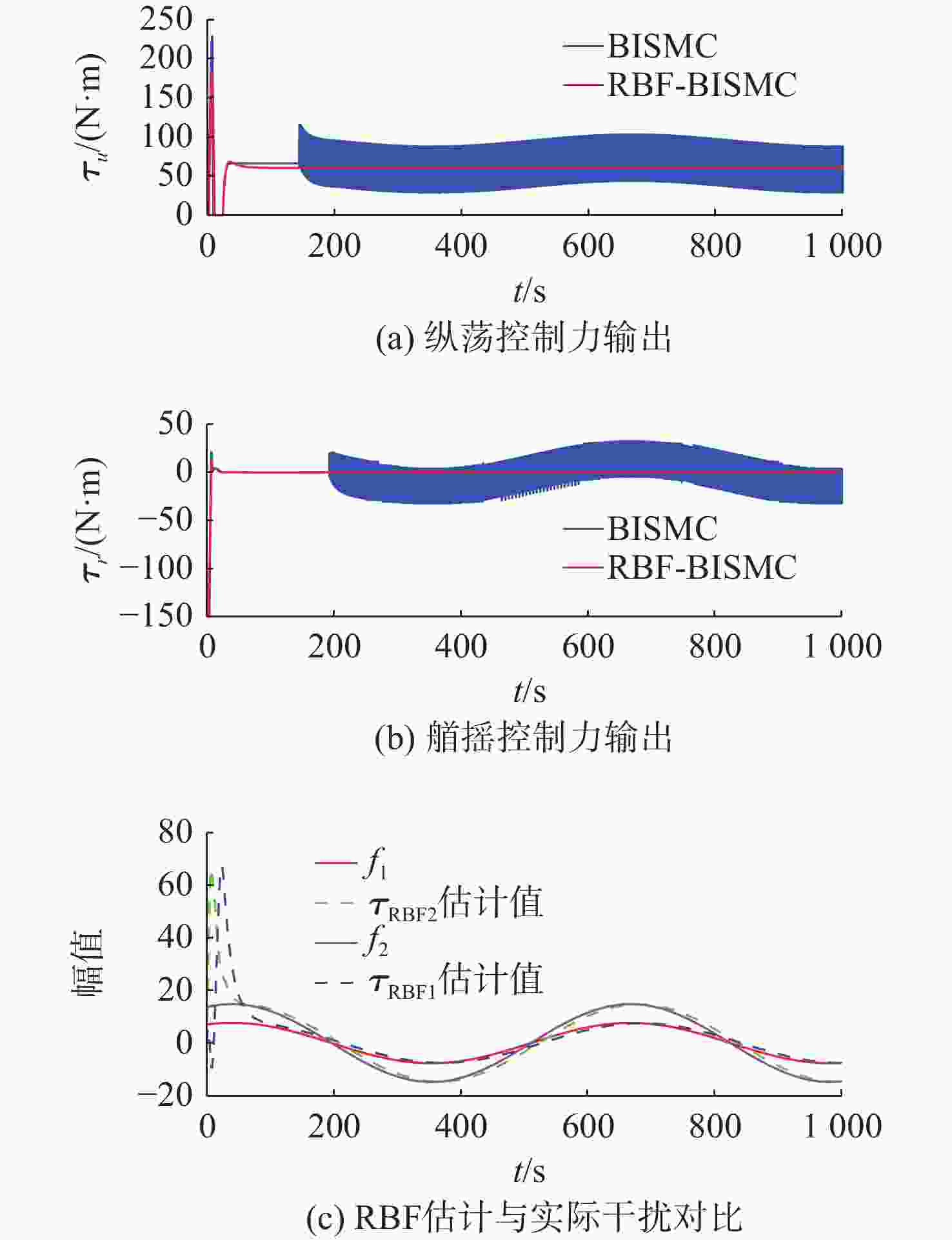
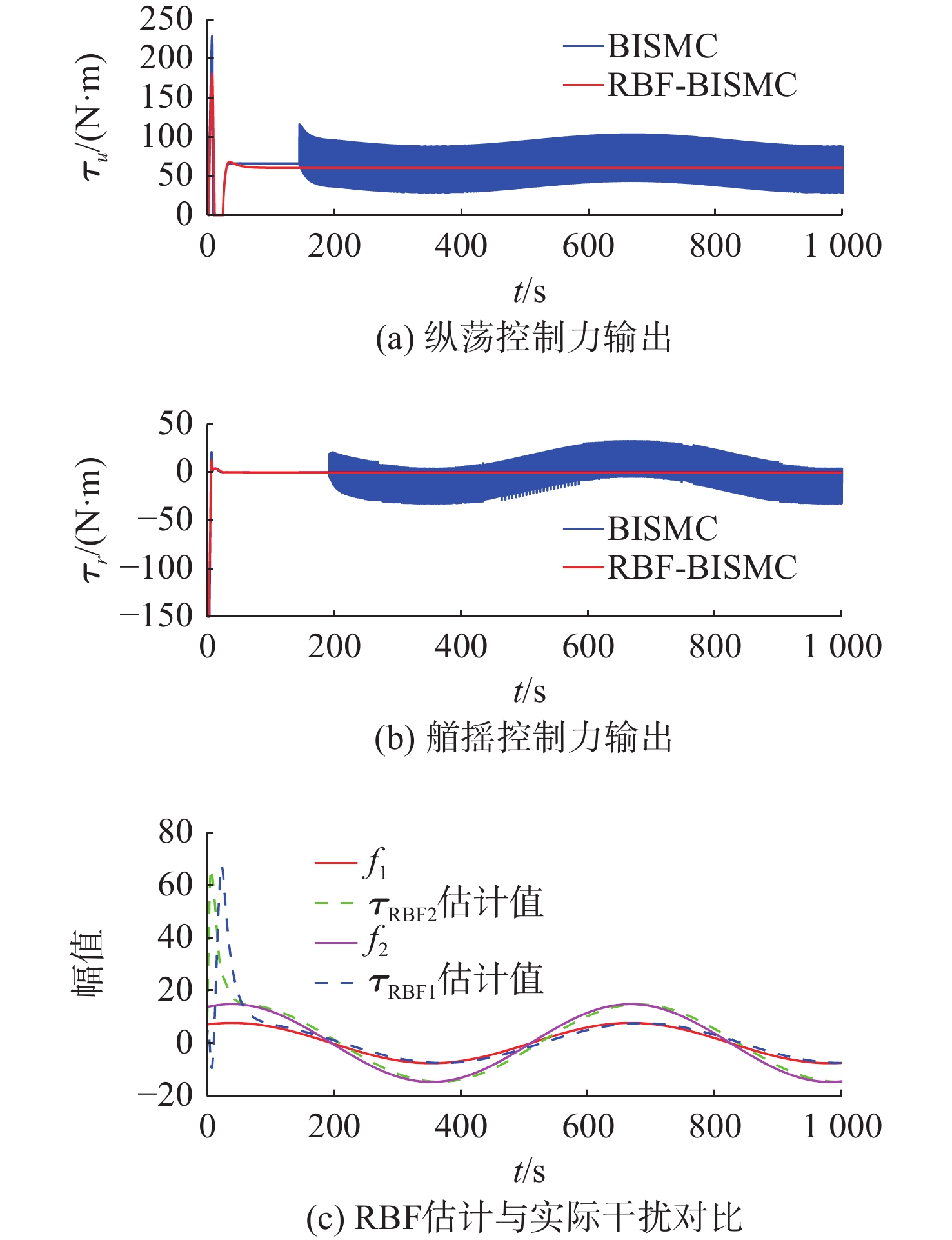
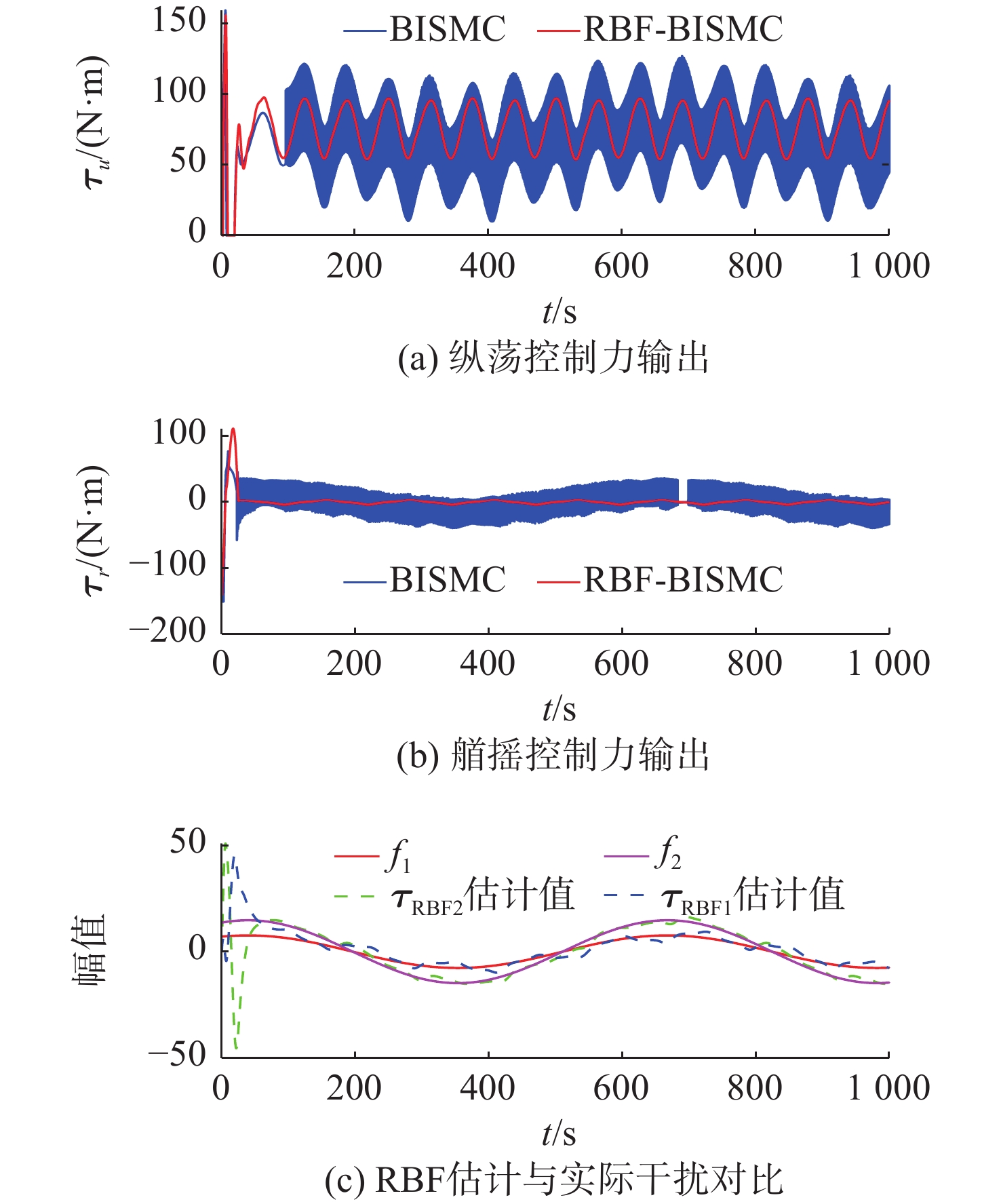
图 6 BISMC与RBF-BISMC控制下输出及RBF估计值对比
Figure 6. Output and RBF estimation value under BISMC and RBF-BISMC control
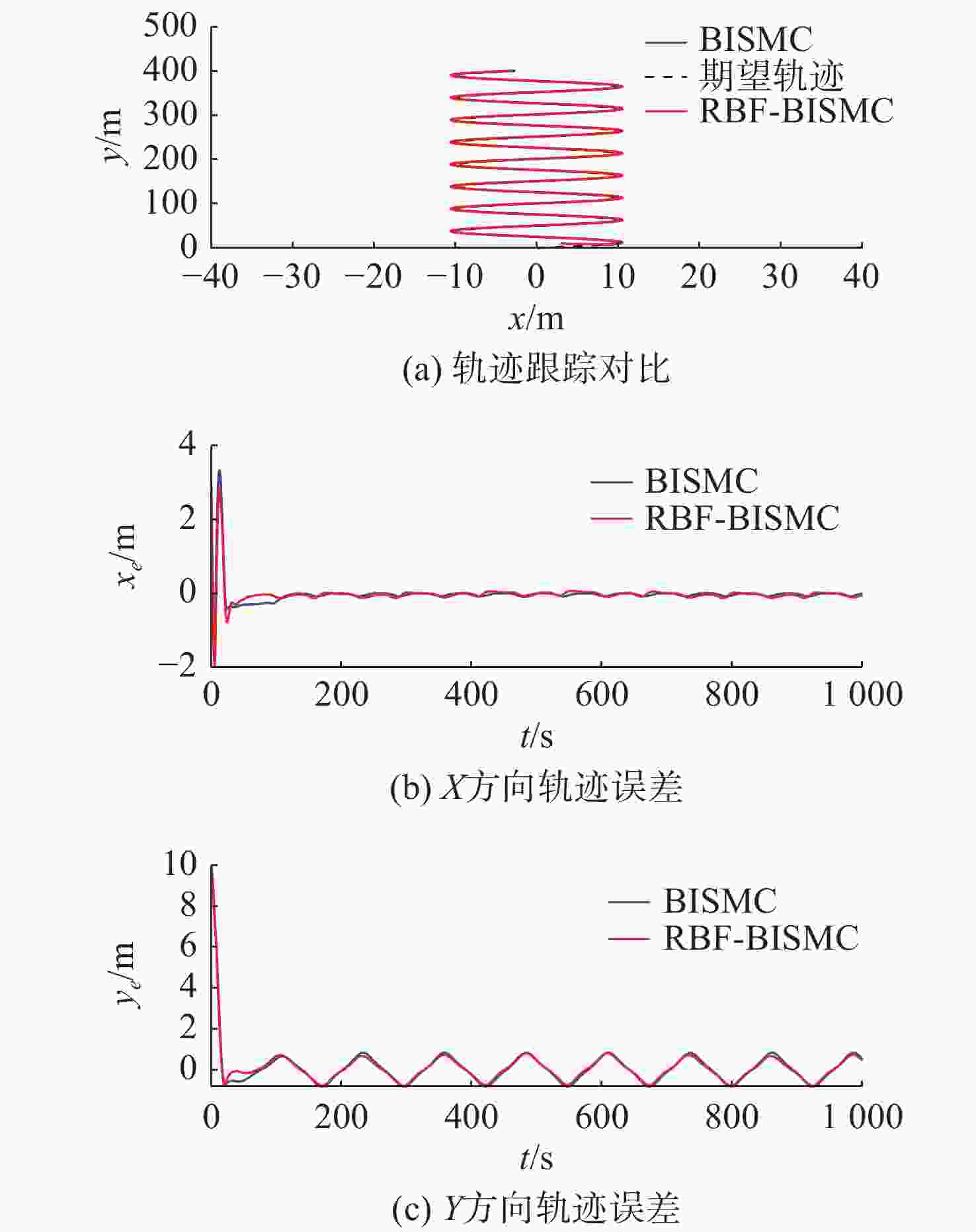
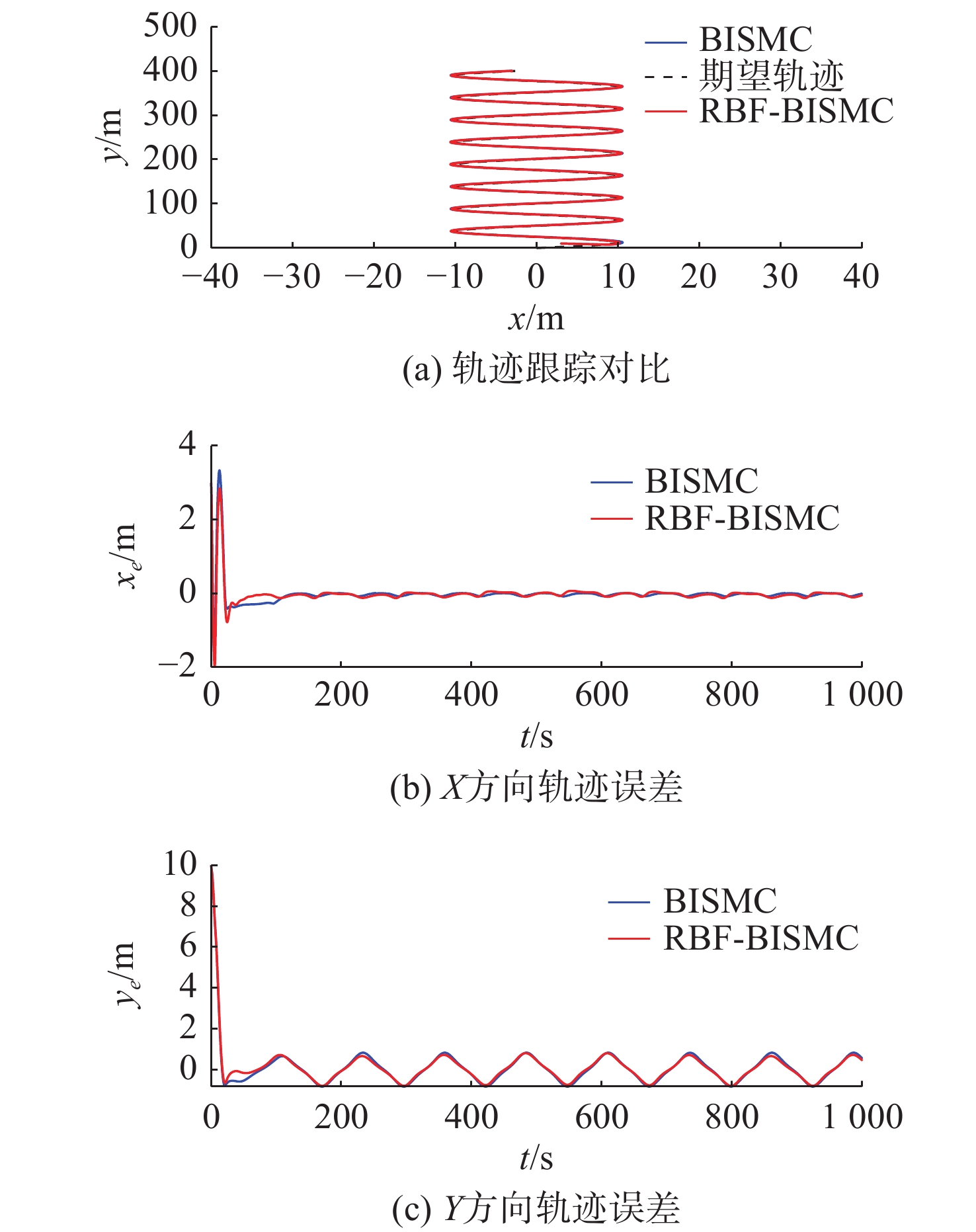
图 7 BISMC与RBF-BISMC控制下的正弦轨迹跟踪对比
Figure 7. Comparison of Sine trajectory tracking under ISMC and RBF-BISMC control
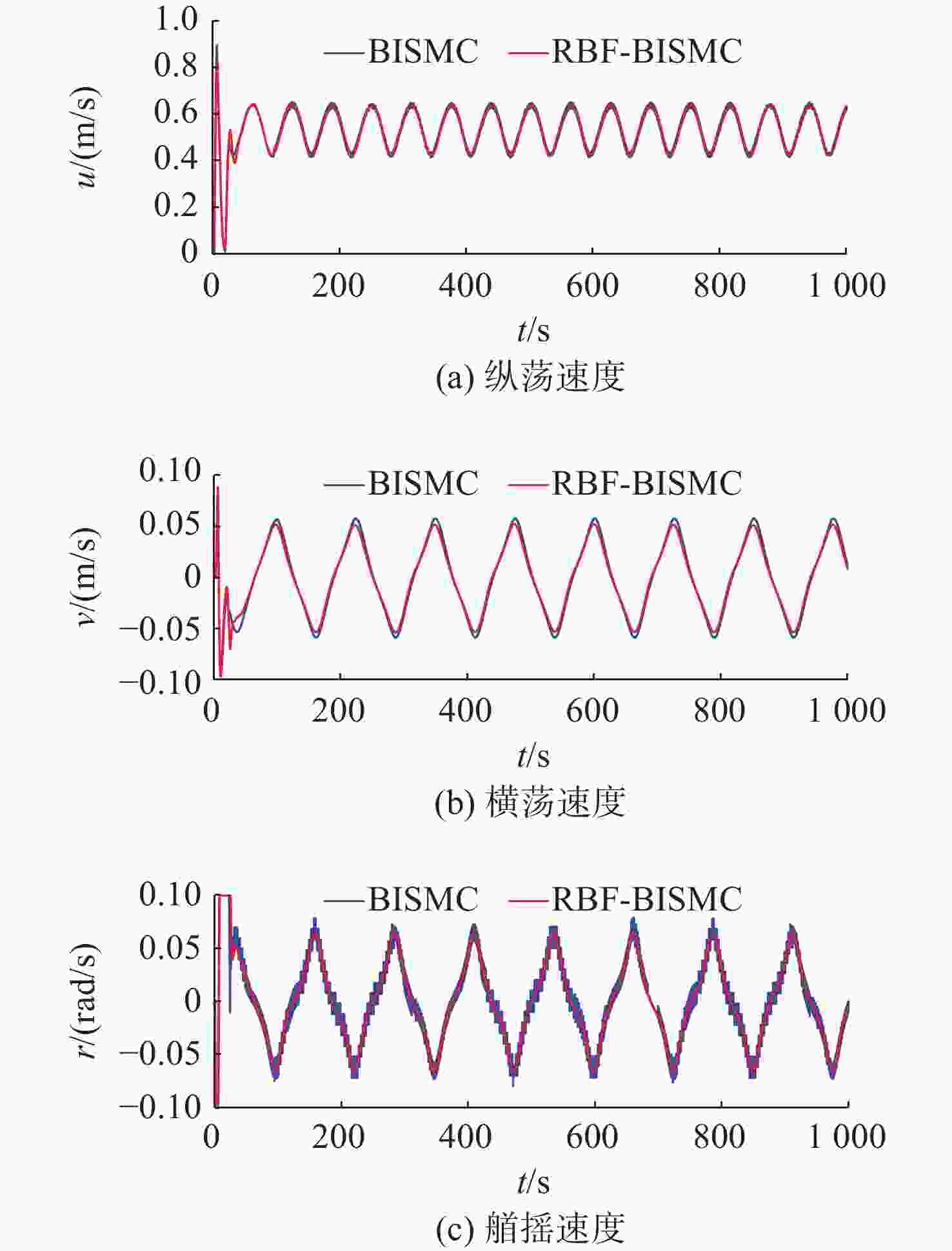
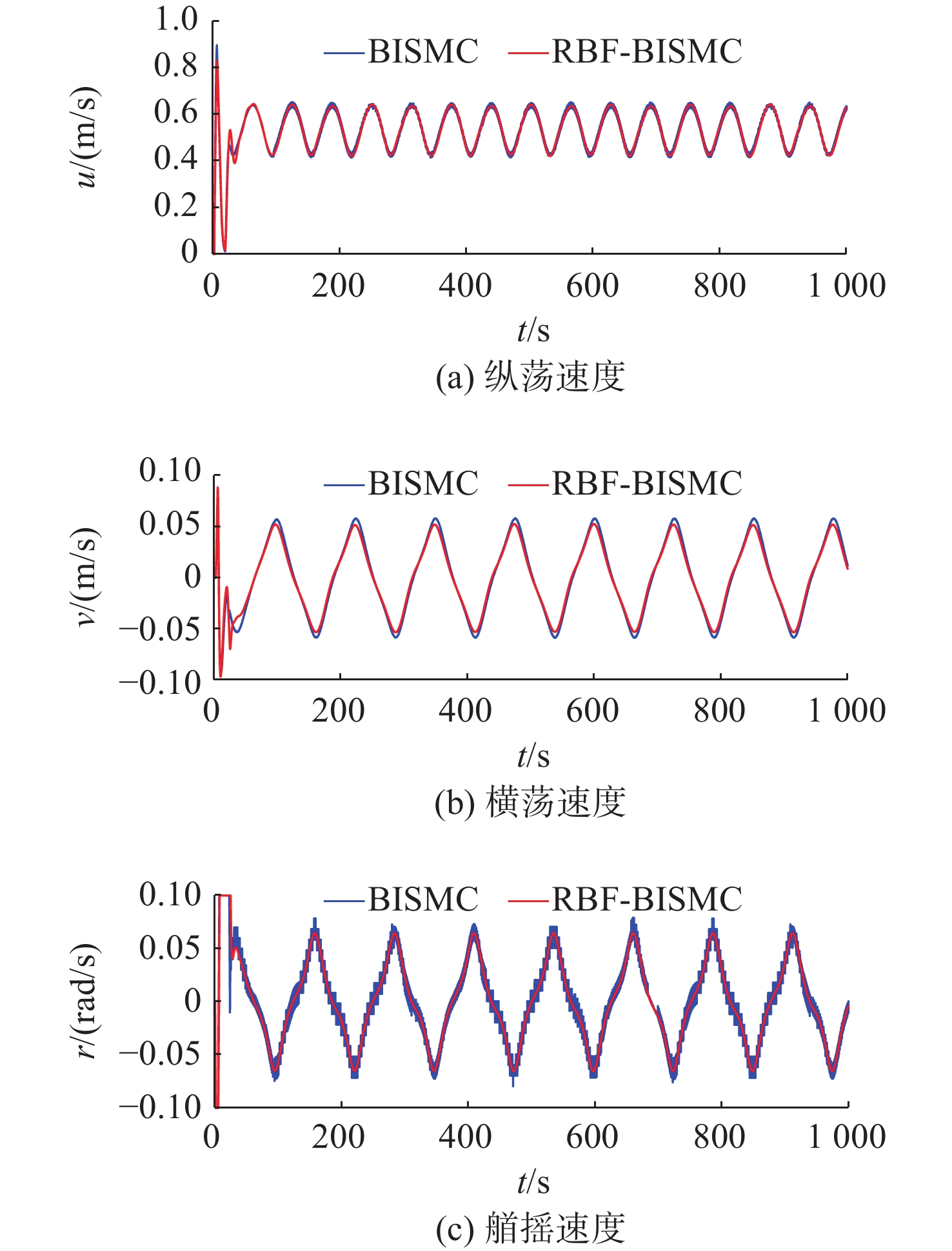
图 8 BISMC与RBF-BISMC控制下的速度跟踪对比
Figure 8. Comparison of speed tracking under BISMC and RBF-BISMC control
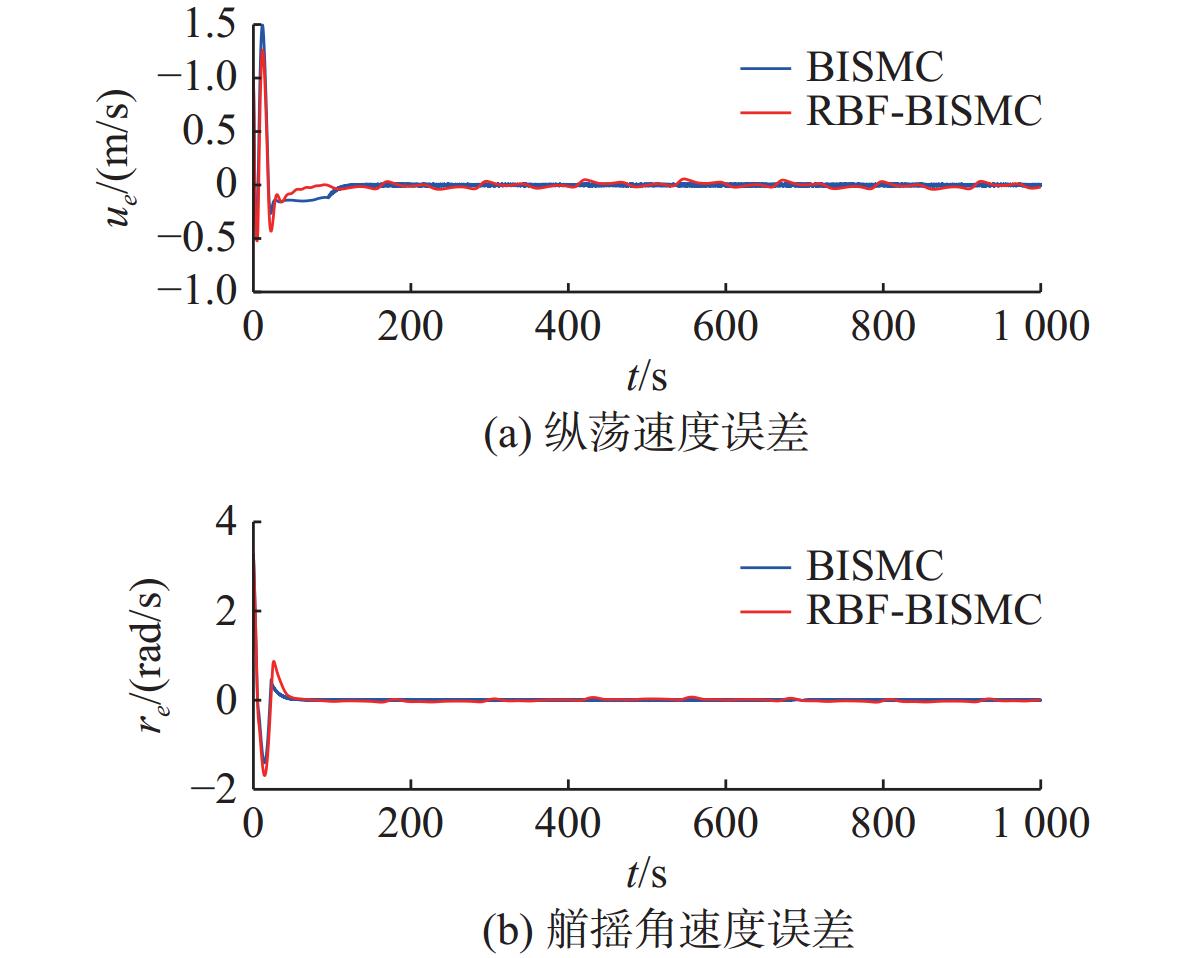
图 9 BISMC与RBF-BISMC控制下的速度误差对比
Figure 9. Comparison of speed error between BISMC and RBF-BISMC control
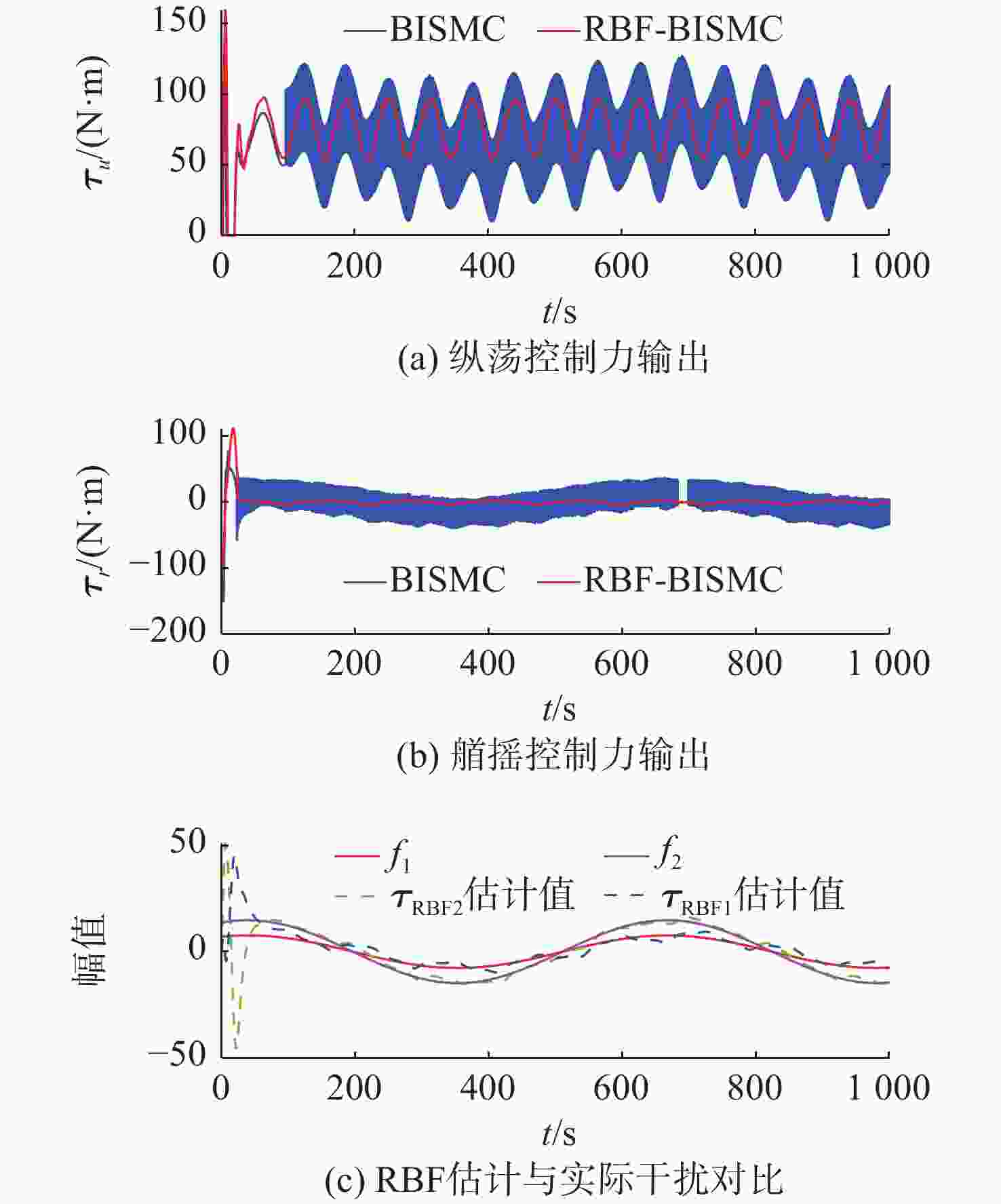
图 10 BISMC与RBF-BISMC控制下输出及RBF估计值对比
Figure 10. Output and RBF estimation under BISMC and RBF-BISMC control
表 1 AUV模型参数
Table 1. Model parameters of AUV
参数 取值 参数 取值 m1/kg 215 m2/kg 265 m3/kg 80 Xu/(kg/s) 70 Yv/(kg/s) 100 Nr/(kg/s) 100 Xu|u|/(kg/s) 100 Yv|v|/(kg/s) 200 Nr|r|/(kg/s) 100  下载: 导出CSV
下载: 导出CSV
-
[1] 王芳, 万磊, 李晔, 等. 欠驱动AUV的运动控制技术综述[J]. 中国造船, 2010, 51(2): 227-241.WANG F, WAN L, LI Y, et al. A survey on development of motion control for underactuated AUV[J]. Shipbuilding of China, 2010, 51(2): 227-241. [2] 吴宝举, 李硕, 王晓辉. 自治水下机器人自适应滑膜控制[J]. 机械设计与制造, 2010(7): 142-144.WU B J, LI S, WANG X H. Adaptive sliding mode control of an autonomous underwater vehicle[J]. Machinery Design & Manufacture, 2010(7): 142-144. [3] 李亚龙, 王俊雄. 考虑未知时变流速的AUV改进动态面自适应跟踪控制[J]. 装备环境工程, 2025, 22(1): 144-151.LI Y L, WANG J X. Improved dynamic surface adaptive tracking control of AUV considering unknown time-varying velocity[J]. Equipment Environmental Engineering, 2025, 22(1): 144-151. [4] 刘杰. 基于反步滑模的AUV轨迹跟踪控制方法研究[D]. 天津: 河北工业大学, 2022. [5] 于曹阳, 向先波, 张嘉磊, 等. 基于反步法的欠驱动AUV鲁棒定深控制[J]. 华中科技大学学报(自然科学版), 2017, 45(10): 117-121.YU C Y, XIANG X B, ZHANG J L, et al. Robust depth control of under-actuated underwater vehicles based on backstepping[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(10): 117-121. [6] XIE W, SI C L, MA H, et al. An active disturbance rejection control for underactuated AUV[C]//2023 38th Youth Academic Annual Conference of Chinese Association of Automation(YAC). Hefei, China: YAC, 2023: 123-127. [7] 徐燕铭, 徐营杰, 宋泽, 等. 基于模糊控制的AUV运动控制研究[J]. 天津航海, 2023(2): 75-78. [8] 李宏宇, 王莹, 陆震, 等. 基于PSO-GA算法和神经网络的AUV姿态协调控制[EB/OL]. [2025-04-16]. https://www.cnki.com.cn/Article/CJFDTotal-SYCS20220321018.htm. [9] 张荣浩. 基于模型预测控制的AUV运动控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. [10] 李山山. 基于改进分数阶滑模的欠驱动AUV轨迹跟踪控制[D]. 哈尔滨: 哈尔滨工程大学, 2024. [11] 许辰宇, 靳华伟, 闫方正. 基于动态面的AUV水平面轨迹跟踪滑模控制[J]. 菏泽学院学报, 2023, 45(5): 50-58. [12] 李相衡, 闫昭琨, 楼建坤, 等. 海流扰动下ROV自适应神经网络控制[J]. 水下无人系统学报, 2025, 33(1): 37-45.LI X H, YAN Z K, LOU J K, et al. Adaptive neural network control of ROVs under ocean current disturbance[J]. Journal of Unmanned Undersea Systems, 2025, 33(1): 37-45. [13] 闫方正, 靳华伟. 输入饱和下的AUV水平面轨迹跟踪滑模控制[J]. 黑龙江工业学院学报(综合版), 2023, 23(7): 91-98.YAN F Z, JIN H W. Sliding mode control of horizontal trajectory tracking of AUV under input saturation[J]. Journal of Heilongjiang University of Technology(Comprehensive Edition), 2023, 23(7): 91-98. [14] YAN Z P, YU H M, ZHANG W, et al. Globally finite-time stable tracking control of underactuated UUVs[J]. Ocean Engineering, 2015, 107: 132-146. doi: 10.1016/j.oceaneng.2015.07.039 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 543
- HTML全文浏览量: 254
- PDF下载量: 124
- 被引次数: 0