A Fast Calibration Method for Intrinsic Parameters of Underwater CamerasBased on Refraction Model
-
摘要: 针对水下视觉作业时相机内参不准造成的作业精度较低问题, 提出了一种水下相机快速标定方法。该方法仅需1张包含2组正交平行线的图像, 通过求解平行线在图像平面的消失点, 构建与等效焦距相关的正交关系, 从而求解相机内参。针对水下成像畸变问题, 通过考虑二阶径向畸变模型, 并以最小重投影误差为优化目标求解畸变系数, 以实现水下成像畸变校准, 提高内参标定精度。通过对比空气中图像和水下目标等效空气图像, 证明了该方法还原的等效图像具有较高的精度。实验结果表明, 文中所提方法操作简便, 显著降低了相机标定时对现场环境的要求, 且能在保证一定精度的同时, 有效提升内参标定速度, 适用于水下相机标定任务。Abstract: To address the low operational precision caused by inaccurate intrinsic parameters of cameras in underwater visual tasks, a fast calibration method for underwater cameras was proposed. A single image containing two sets of mutually orthogonal parallel lines was used in the proposed method. By solving the vanishing points of these lines on the image plane, an orthogonal relationship related to the equivalent focal length was established. This enabled the intrinsic parameters of the camera to be determined. To address the underwater imaging distortion problem, the distortion coefficients were solved using the second-order radial distortion model with the minimum reprojection error as the optimization objective, thereby achieving the distortion calibration of underwater images and improving the accuracy of intrinsic parameter calibration. Furthermore, the accuracy of the method in restoring images was demonstrated by comparing in-air target images with their equivalent air images of underwater targets. Experimental results indicate that the proposed method is simple to operate, significantly reduces environmental requirements during camera calibration, effectively enhances calibration speed while maintaining a certain level of accuracy, and is suitable for calibration tasks of underwater cameras.
-
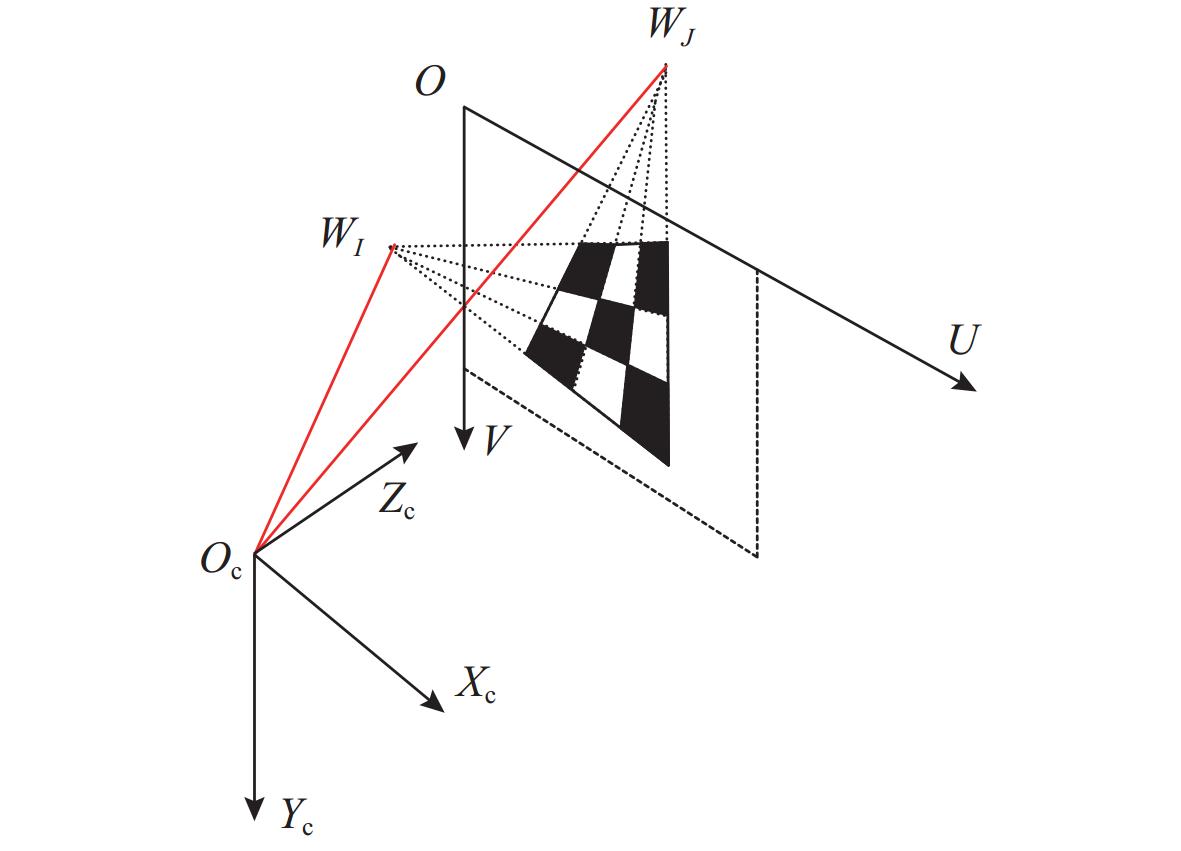
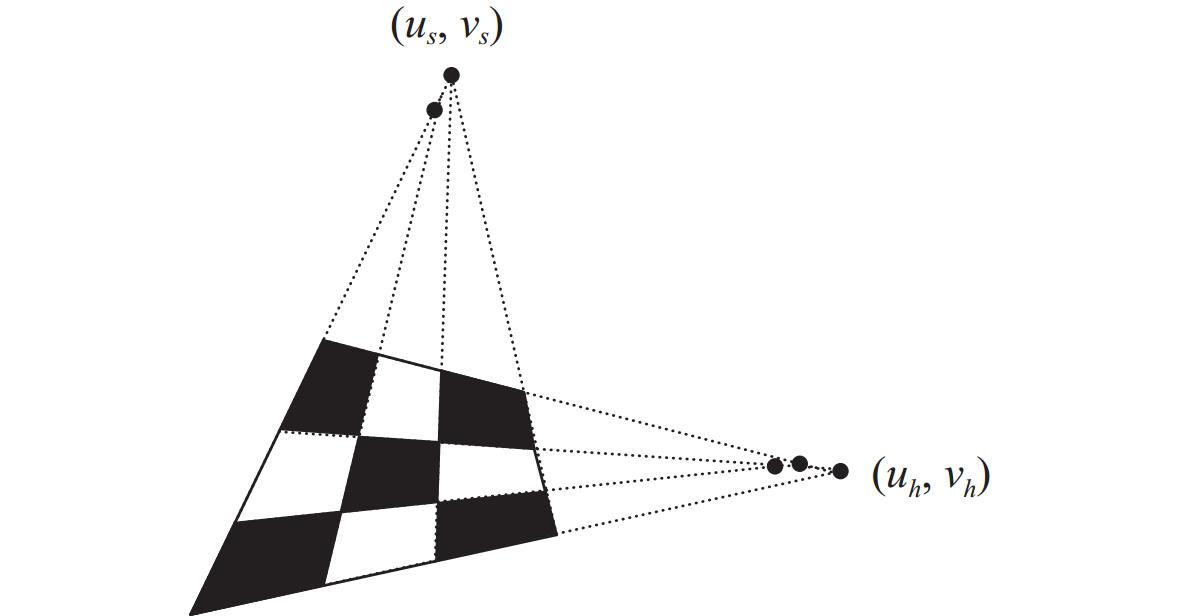
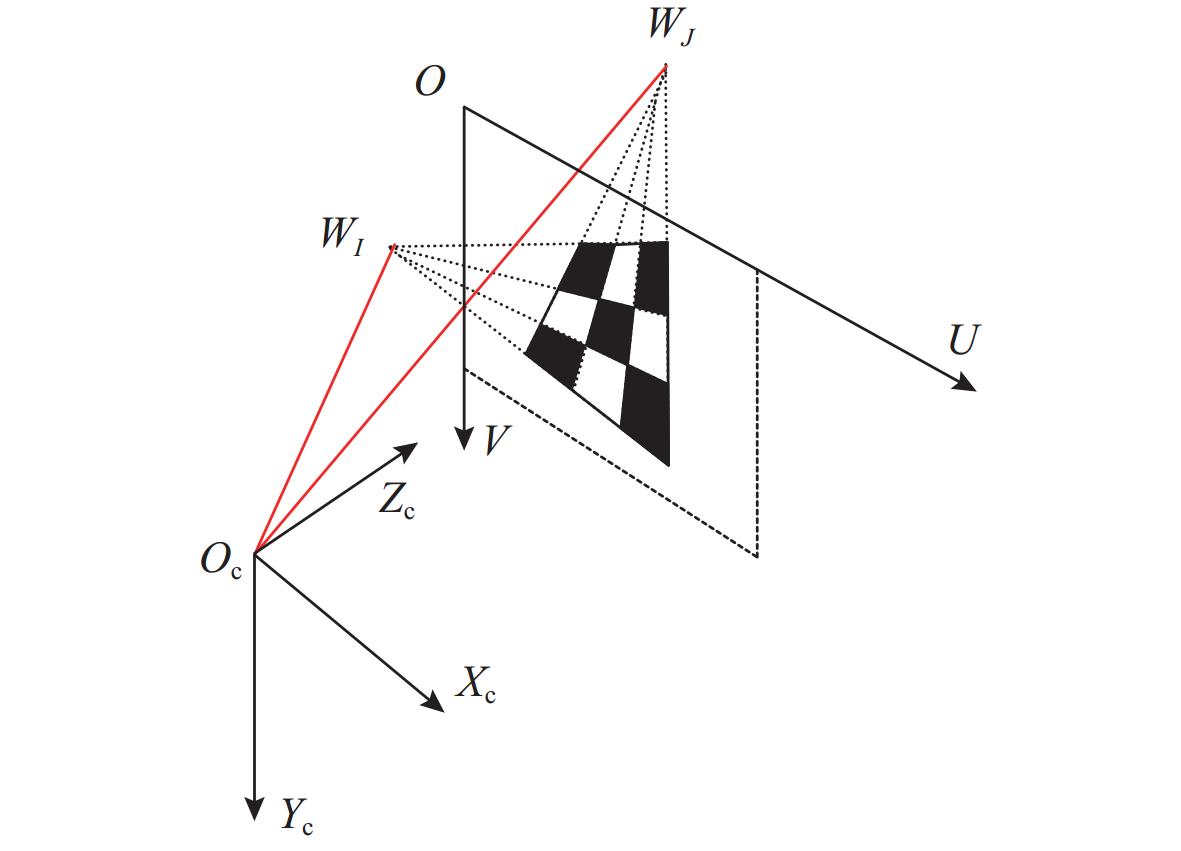
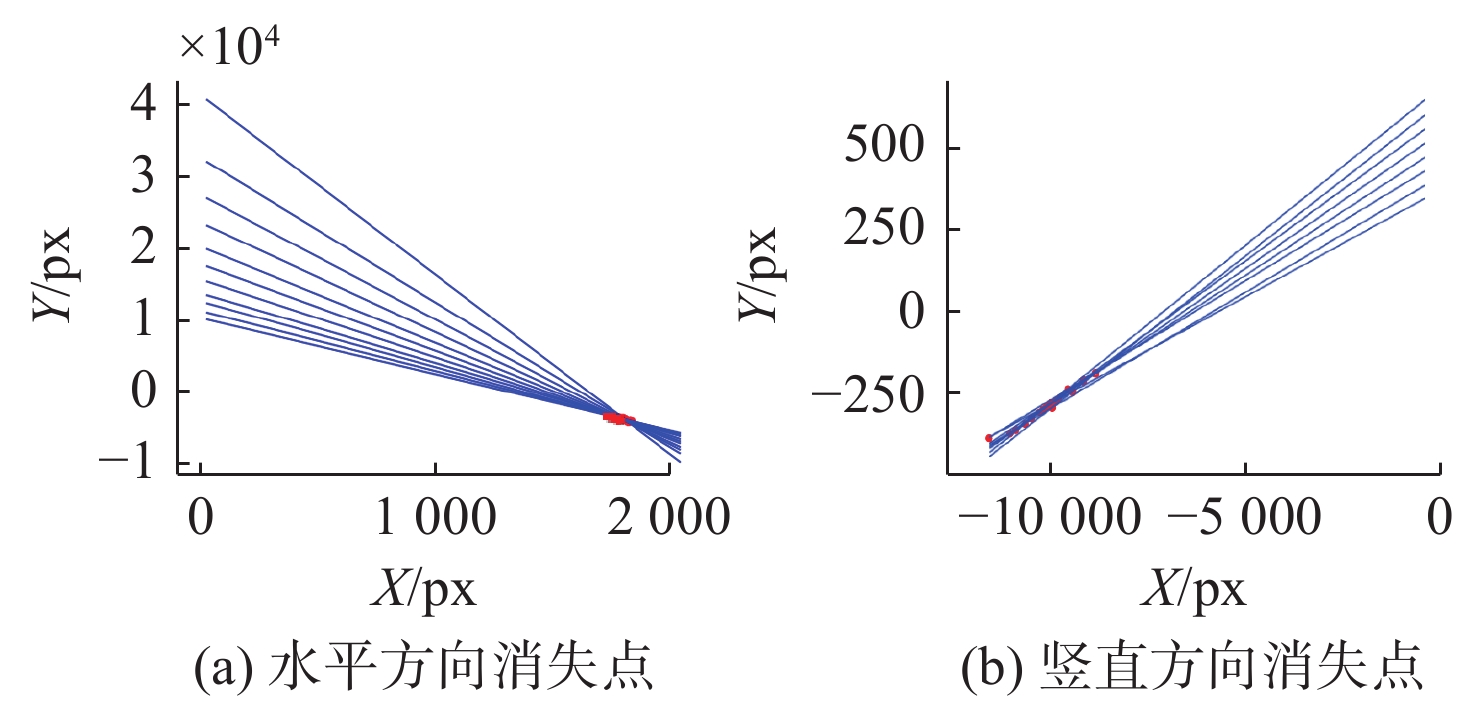
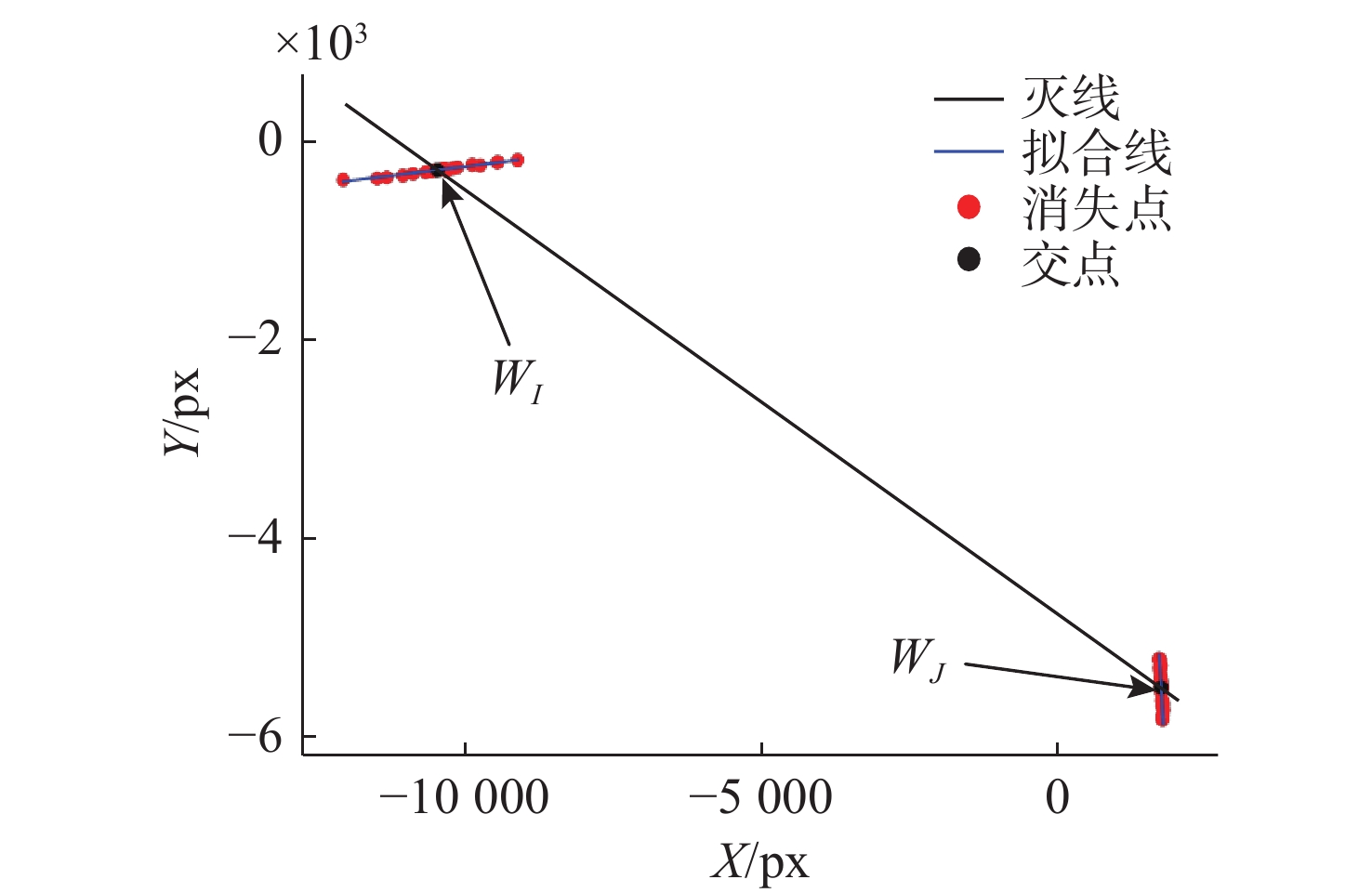
图 4 基于消失点求焦距的几何示意图
Figure 4. Geometric schematic diagram for solving the focal length based on vanishing points
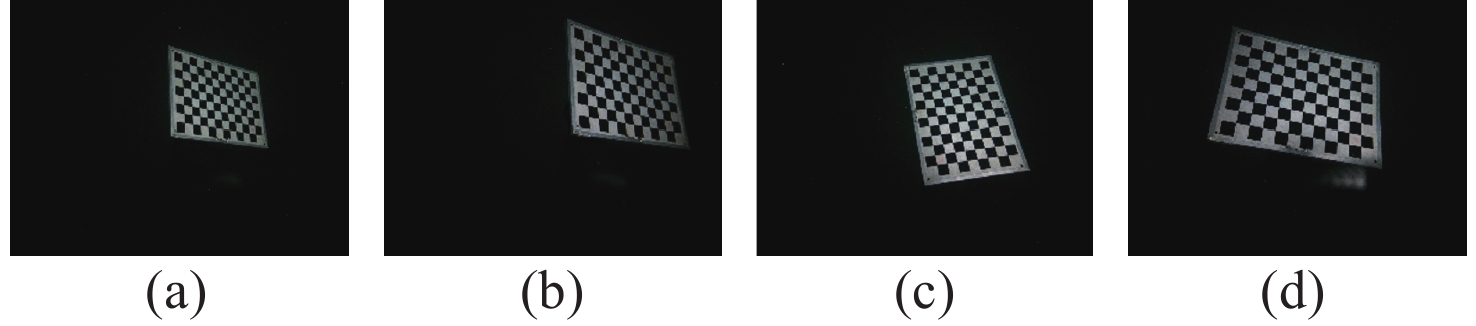
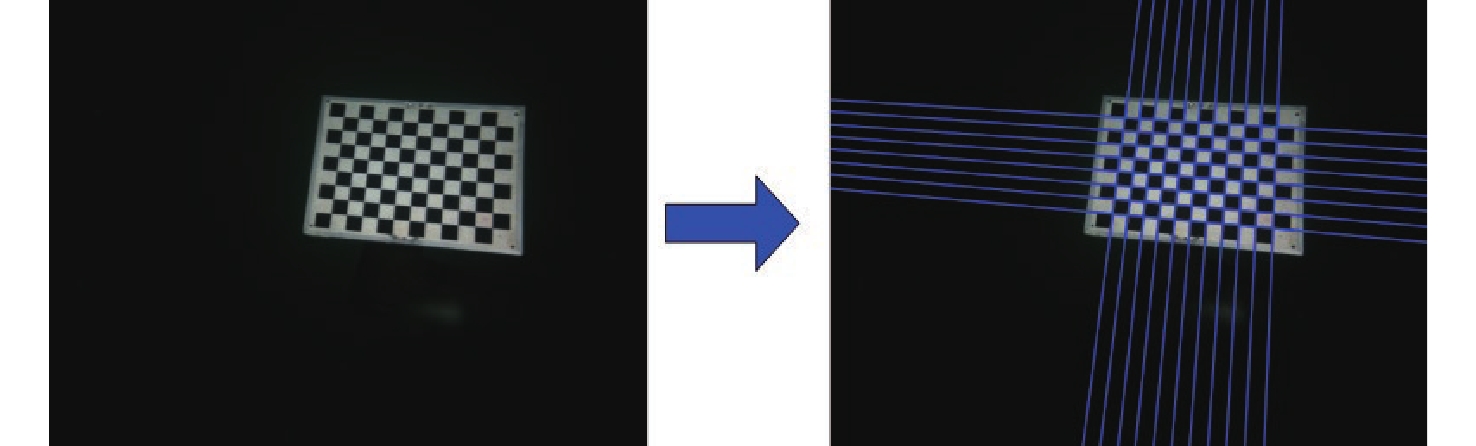
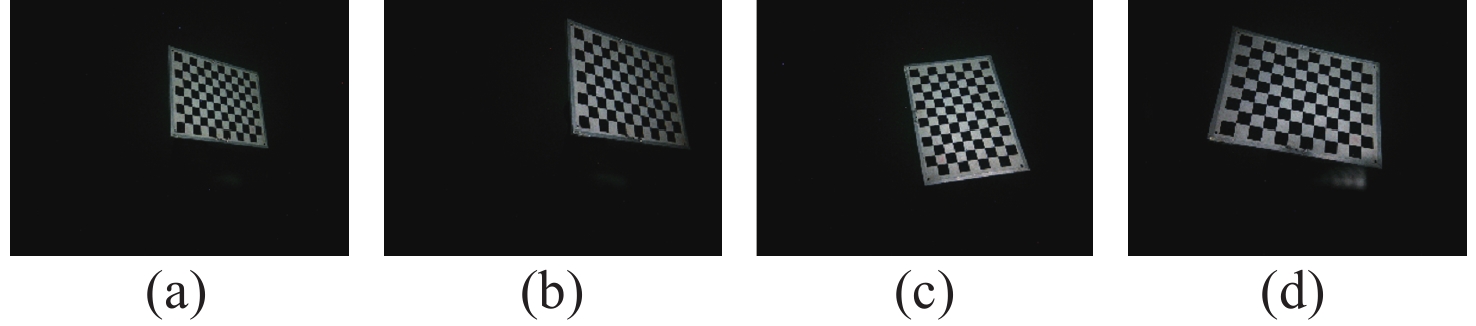
图 10 不同位姿水下标定板图像
Figure 10. Underwater calibration board images for different positions
表 1 基于消失点的水下快速标定结果
Table 1. Underwater rapid calibration results based on vanishing point
参数 计算结果 ${W_I}$/px $\left( { - 10\;442.71, - 291.76} \right)$ ${W_J}$/px $\left( {1\;763.43, - 5\;518.66} \right)$ $ f_{\mathrm{w}} $/mm $5.054$ ${\boldsymbol{K}}$ $\left[ {\begin{array}{*{20}{c}} {1\;347.75}&0&{1\;024} \\ 0&{1\;347.75}&{768} \\ 0&0&1 \end{array}} \right]$ 重投影误差/px $0.177$ 计算时间/s $0.008\;4$  下载: 导出CSV
下载: 导出CSV
表 2 基于消失点的水下快速标定优化结果
Table 2. Optimization results of underwater fast calibration based on vanishing point
参数 计算结果 ${\eta _1},{\eta _2}$ $ 0.212\;6,0.646\;5 $ 像平面中心点 $\left( {1\;020.97,763.23} \right)$ ${W_I}$/px $\left( { - 19\;700.14, - 1\;150.59} \right)$ ${W_J}$/px $ \left( {1\;621.54, - 4\;291.55} \right) $ $ f\mathrm{_w} $/mm $6.05$ ${\boldsymbol{K}}$ $\left[ {\begin{array}{*{20}{c}} {1\;691.7}&0&{1\;020.97} \\ 0&{1\;691.7}&{766.23} \\ 0&0&1 \end{array}} \right]$ 重投影误差/px $0.089$ 计算时间/s $1.580\;8$
下载: 导出CSV
表 3 不同图像标定结果
Table 3. Calibration results for different images
图片编号 等效焦距/mm 重投影误差/px 计算时间/s (a) 6.1426 0.0250 2.58 (b) 6.3126 0.0598 1.94 (c) 6.4598 0.0823 1.14 (d) 6.0965 0.0249 2.75 平均 6.2529 0.048 0 2.10
下载: 导出CSV
表 4 基于消失点的空气中图像快速标定优化结果
Table 4. Optimization results for fast calibration in air images based on vanishing point
参数 计算结果 畸变系数 $\left( {0.001\;5,0.001\;7} \right)$ 像平面中心点 $\left( {1\;022.15,767.53} \right)$ $ f\mathrm{_a} $/mm $ {\text{4}}{\text{.64}} $ ${\boldsymbol{K}}$ $ \left[ {\begin{array}{*{20}{c}} {1\;237.1}&0&{1\;022.15} \\ 0&{1\;237.1}&{767.53} \\ 0&0&1 \end{array}} \right] $ 重投影误差/px $ {\text{0}}{\text{.067}} $
下载: 导出CSV
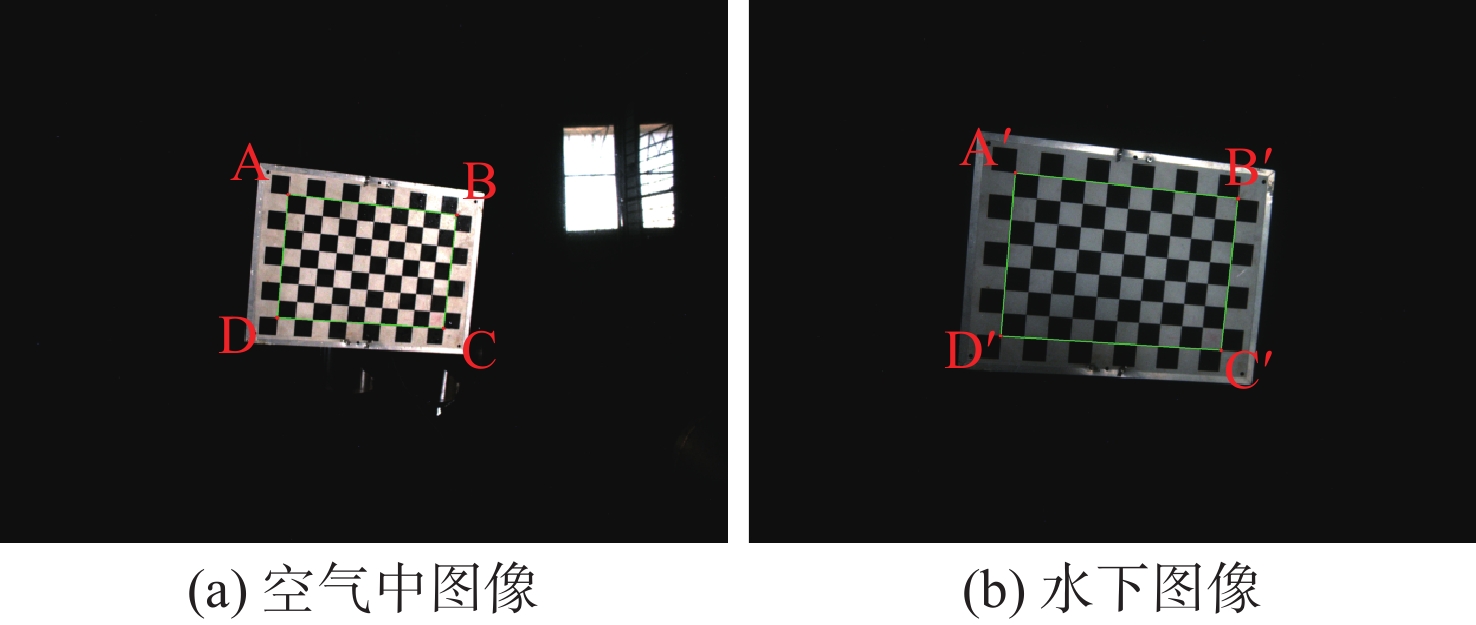
表 5 特征点像素值
Table 5. Pixel value of feature point
特征点 像素坐标/px 特征点 像素坐标/px $A$ $\left( {811.61,550.41} \right)$ $A'$ $\left( {812.91,553.81} \right)$ $B$ $\left( {1\;284.39,608.70} \right)$ $B'$ $\left( {1\;292.70,610.01} \right)$ $C$ $\left( {780.87,898.99} \right)$ $C'$ $\left( {781.48,907.39} \right)$ $D$ $\left( {1\;247.80,928.53} \right)$ $D'$ $\left( {1\;255.83,938.12} \right)$
下载: 导出CSV
表 6 水下等效图像与空气中图像相对误差
Table 6. Relative error between the underwater equivalent image and the image in air
特征点 X方向相对误差/% Y方向相对误差/% $A'$ 0.162 0.616 $B'$ 0.645 0.215 $C'$ 0.001 0.934 $D'$ 0.643 1.032
下载: 导出CSV
-
[1] DOLEREIT T, VON LUKAS U F, KUIJPER A. Underwater stereo calibration utilizing virtual object points[C]//OCEANS 2015 - Genova. Genova, Italy: OCEANS, 2015: 1-7. [2] TELEM G, FILIN S. Photogrammetric modeling of underwater environments[J]. ISPRS Journal of Photogram Metry and Remote Sensing, 2010, 65(5): 433-444. doi: 10.1016/j.isprsjprs.2010.05.004 [3] 杨钊, 景包睿, 张频. 基于发射管的UUV自动回收机械臂动力学研究[J]. 舰船科学技术, 2021, 43(11): 163-168.YANG Z, JING B R, ZHANG P. Dynamics of automatic recovery manipulator based on pipeline[J]. Ship Science and Technology, 2021, 43(11): 163-168. [4] 陈强. 水下无人航行器[M]. 北京: 国防工业出版社, 2014. [5] 朱志鹏, 朱志宇. 一种基于双目视觉的水下导引光源检测和测距方法[J]. 水下无人系统学报, 2021, 29(1): 65-73.ZHU Z P, ZHU Z Y. Method for detecting and ranging an underwater guided light source based on binocular vision[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 65-73. [6] 季晓燕. 水下目标定位的若干方案对比研究[J]. 舰船电子工程, 2013, 33(3): 121-123.JI X Y. Comparative study of underwater acoustic localization[J]. Ship Electronic Engineering, 2013, 33(3): 121-123. [7] SUN J, WANG H, ZHU X. A fast underwater calibration method based on vanishing point optimization of two orthogonal parallel lines[J]. Measurement, 2021, 178: 109305. doi: 10.1016/j.measurement.2021.109305 [8] GRACIAS N, SANTOS V J. Underwater video mosaics as visual navigation maps[J]. Computer Vision and Image Understanding, 2000, 79(1): 66-91. doi: 10.1006/cviu.2000.0848 [9] KUNZ C, SINGH H. Stereo self-calibration for seafloor mapping using AUVs[C]//2010 IEEE/OES Autonomous Underwater Vehicles. Monterey, CA, USA: IEEE, 2010: 1-7. [10] MELINE A, TRIBOULET J, JOUVENCEL B. A camcorder for 3D underwater reconstruction of archeological objects[C]//OCEANS 2010 MTS/IEEE SEATTLE. Seattle, WA, USA: OCEANS, 2010: 1-9. [11] CHEN X, YANG Y H. Two-view camera housing parameters calibration for multi-layer flat refractive interface[C]//2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, OH, USA: IEEE, 2014: 524-531. [12] SHORTIS M. Calibration techniques for accurate measurements by underwater camera systems[J]. Sensors, 2015, 15(12): 30810-30826. doi: 10.3390/s151229831 [13] YU J, CHEN X, KONG S. Visual Perception and Control of Underwater Robots[M]. Boca Raton: CRC Press, 2021. [14] 董政绩. 基于折射成像模型的水下相机标定与三维重建算法研究[D]. 成都: 电子科技大学, 2024. [15] KONOVALENKO I A, SIDORCHUK D S, ZENKIN G M. Analysis and compensation of geometric distortions, appearing when observing objects under water[J]. Pattern Recognition and Image Analysis, 2018, 28: 379-392. doi: 10.1134/S1054661818030112 [16] ZHANG Z Y. Flexible camera calibration by viewing a plane from unknown orientations[C]//Proceedings of the Seventh IEEE International Conference on Computer Vision. Kerkyra, Greece: IEEE, 1999: 666-673. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 725
- HTML全文浏览量: 266
- PDF下载量: 108
- 被引次数: 0