

Adaptive Bilateral Teleoperation Control Design in Task Space with Guaranteed Parameter Estimation
-
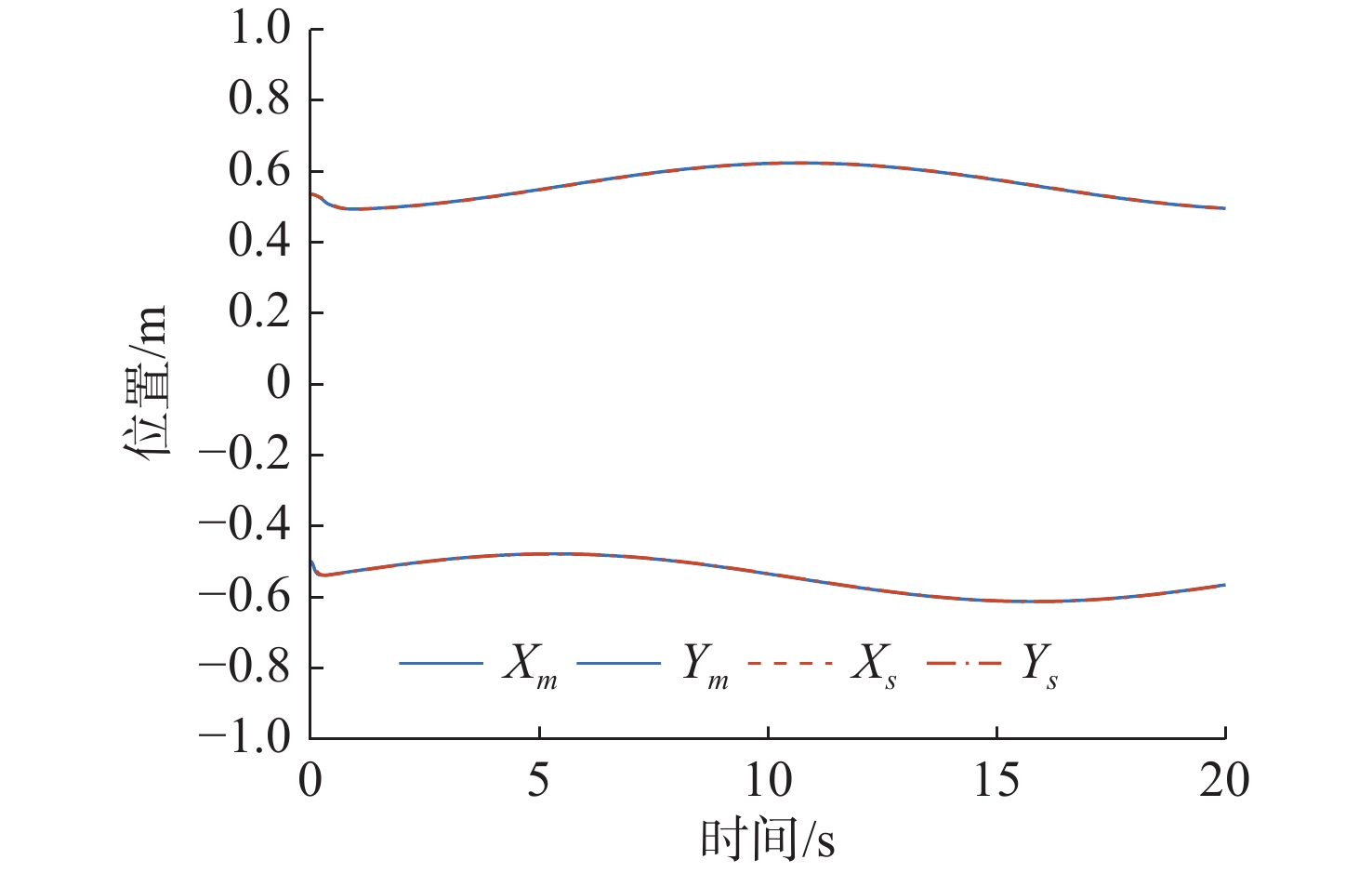
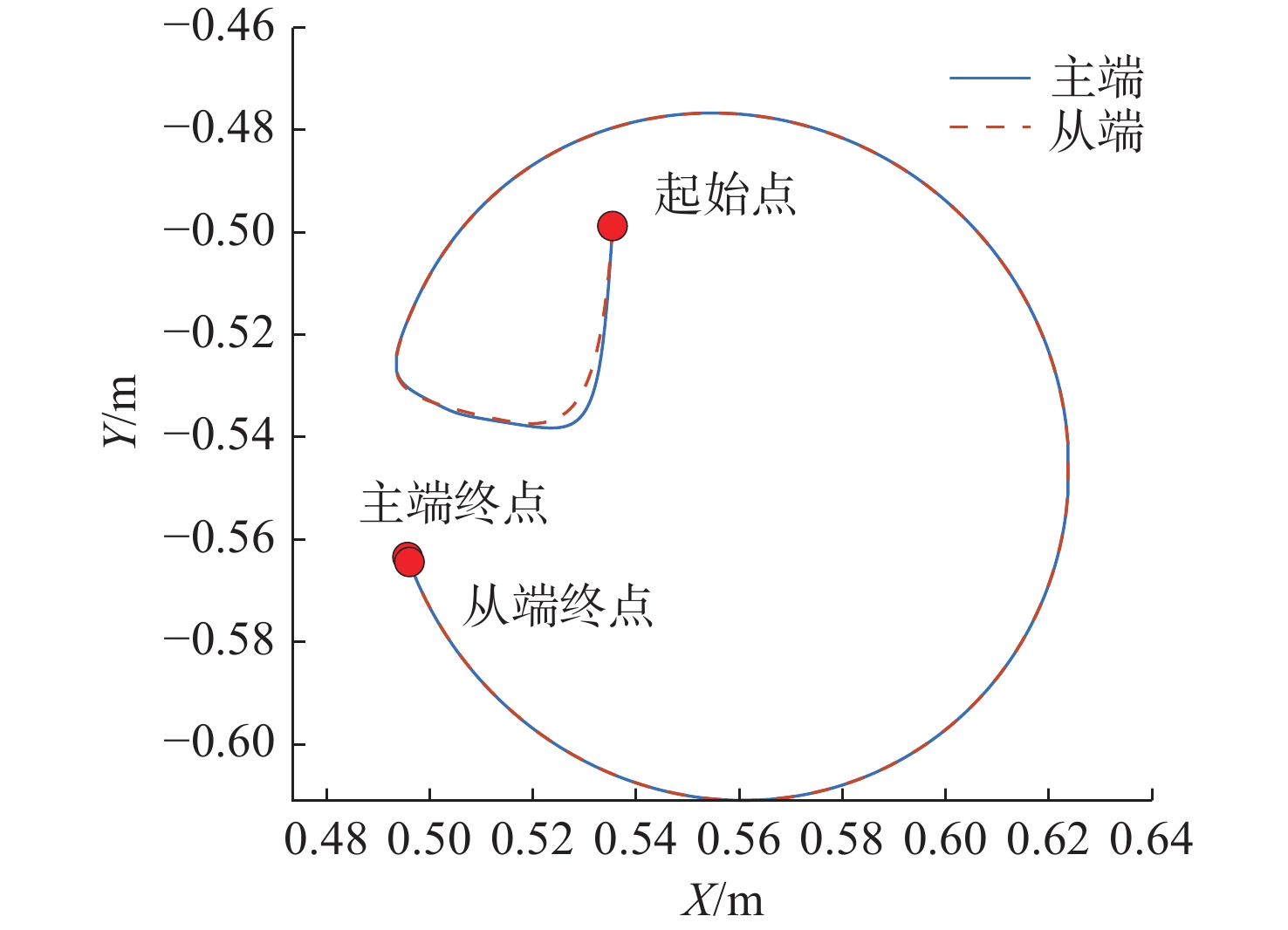
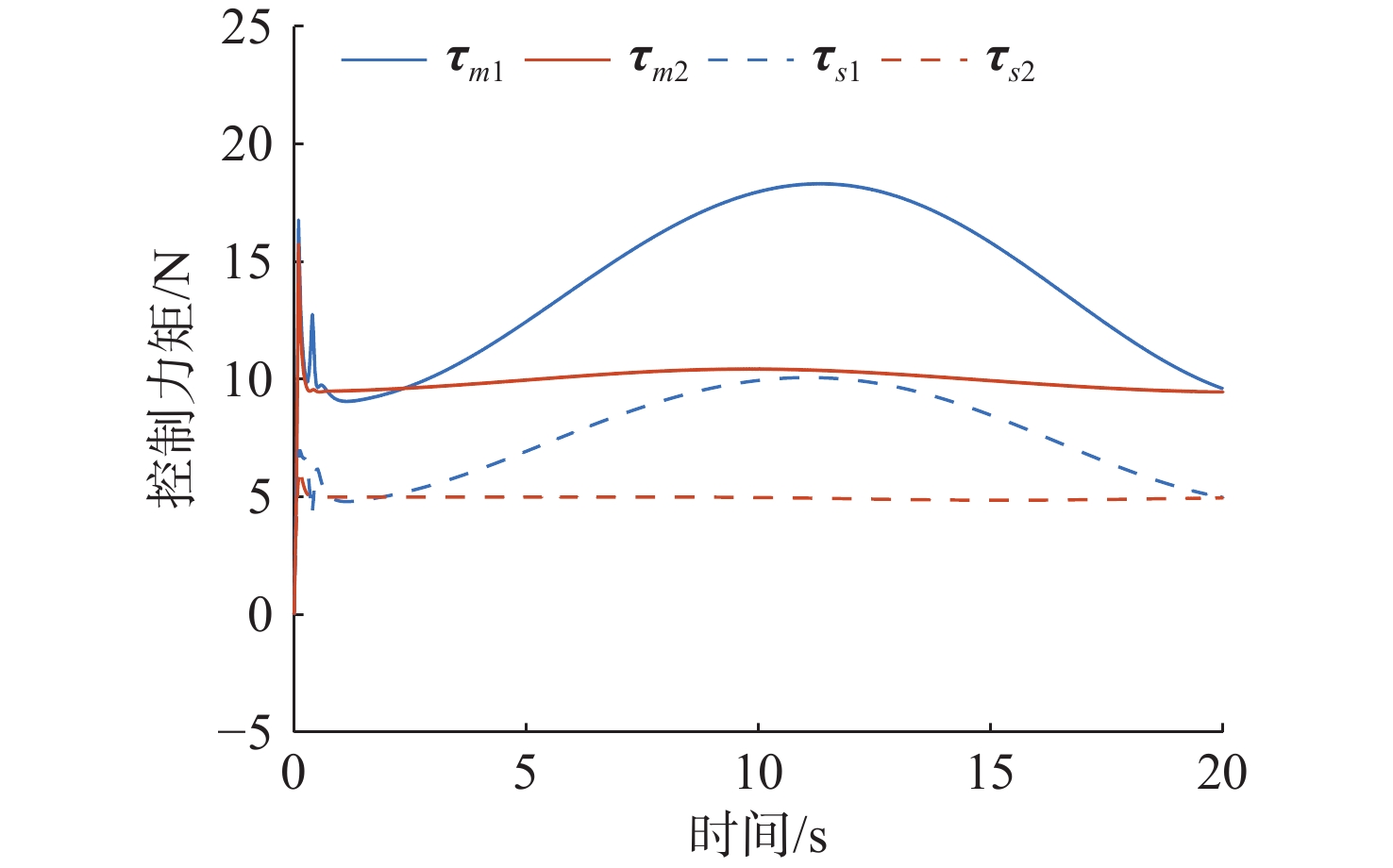
摘要: 在任务空间的框架下, 自适应控制技术已广泛应用于双边遥操作系统, 旨在实现主、从端水下机器人在笛卡尔空间的位置和速度精确同步。为了提高遥操作系统的同步性, 现有研究提出了参数估计算法以补偿未知动态的影响,但传统自适应机制难以实现系统参数的精准估计, 因此无法完全补偿未知动态。针对该问题,文中提出了一种面向任务空间遥操作系统的自适应控制策略, 该策略创新性地以参数误差作为参数估计更新的驱动因子, 进而设计了新的自适应律。理论分析证明, 该策略不仅能够实现遥操作系统在任务空间中的位置与速度同步, 还能同时完成对系统参数的精确估计。仿真和理论分析表明,参数估计的收敛性能显著增强遥操作系统的主从同步性,充分证明了所提策略的有效性和优越性。
-
关键词:
- 水下机器人; 双边遥操作 /
- 任务空间 /
- 自适应参数估计
Abstract: In the framework of task space, adaptive control techniques have been widely applied to bilateral teleoperation systems, aiming at achieving precise synchronization between master and slave underwater vehicle in terms of Cartesian position and velocity. In order to improve the synchronization of teleoperation systems, parameter estimation algorithms have been proposed in several studies to compensate for the effects of unknown dynamics. Nevertheless, designs based on traditional adaptive mechanisms have not yet achieved accurate estimation of the system parameters and therefore cannot fully compensate for the unknown dynamics. This paper proposed an adaptive control strategy for task space teleoperation systems, which innovatively adopted the parameter error as the driving factor for parameter estimation update and then designed a new adaptive law. The theoretical analysis proves that this strategy can achieve the position and velocity synchronization of teleoperation systems in task space and achieve accurate estimation of system parameters at the same time. The convergence performance of parameter estimation is shown through simulation and theoretical analysis to significantly enhance the master-slave synchronization of teleoperation systems. Meanwhile, the effectiveness and superiority of this study are fully verified. -
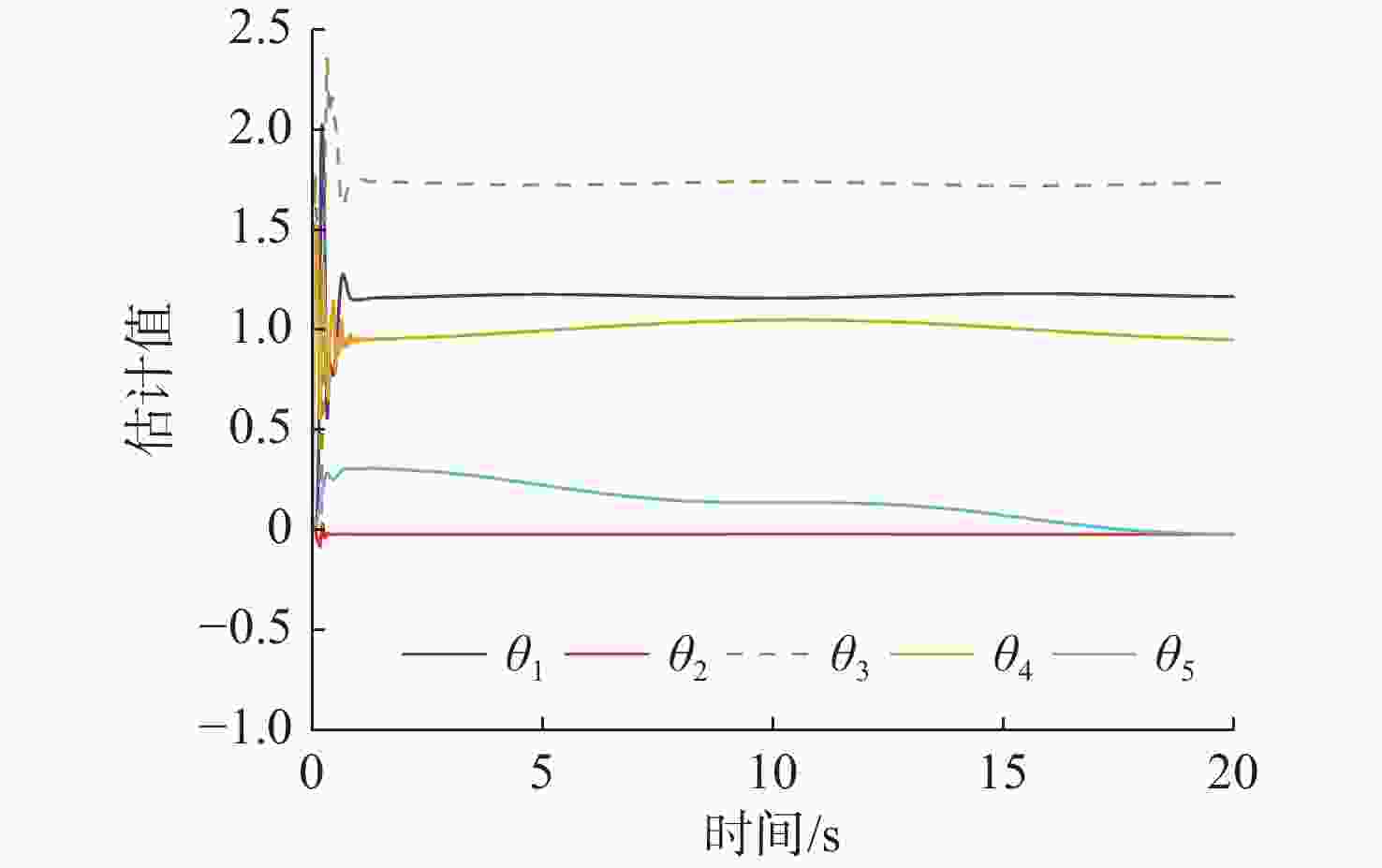
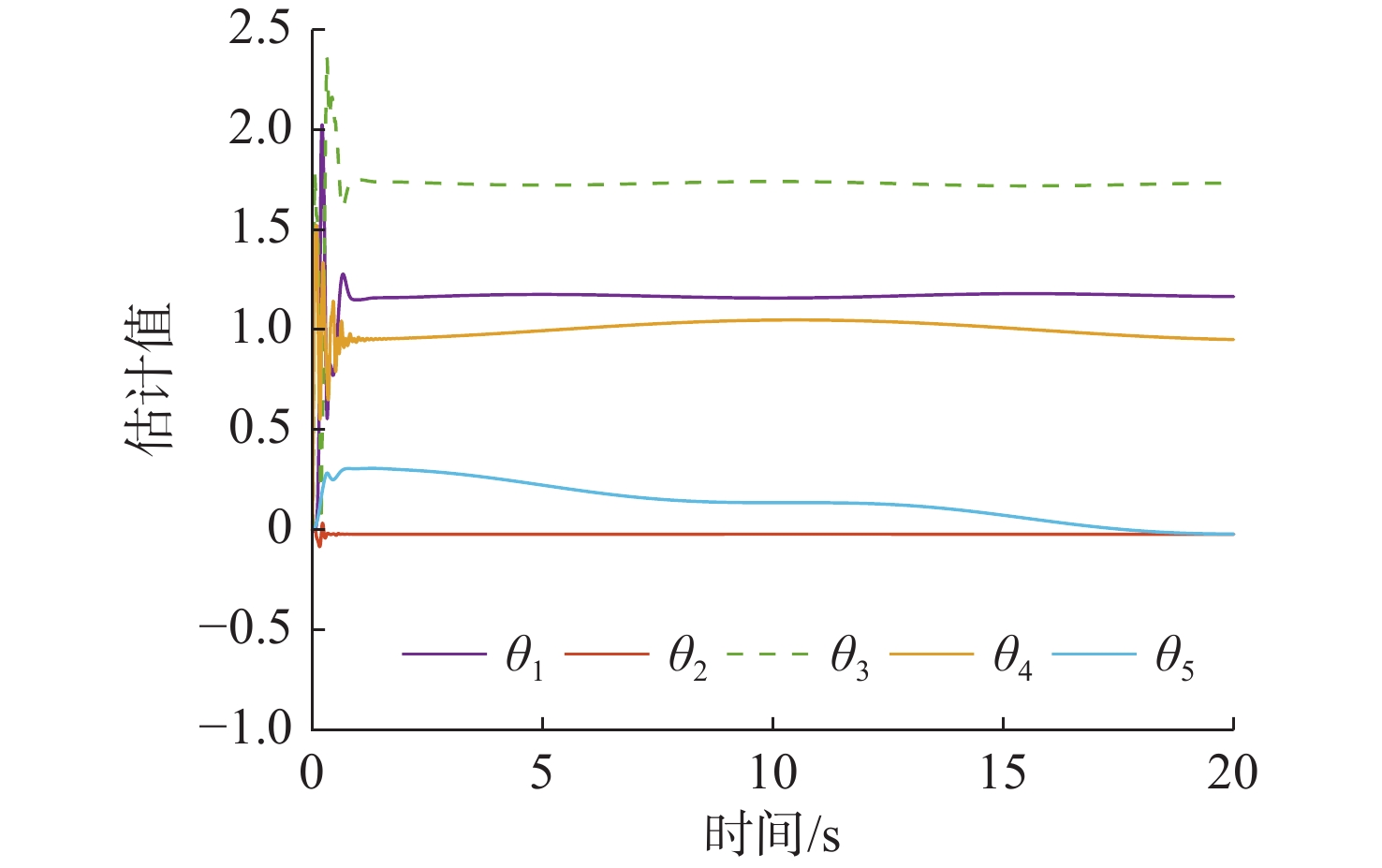
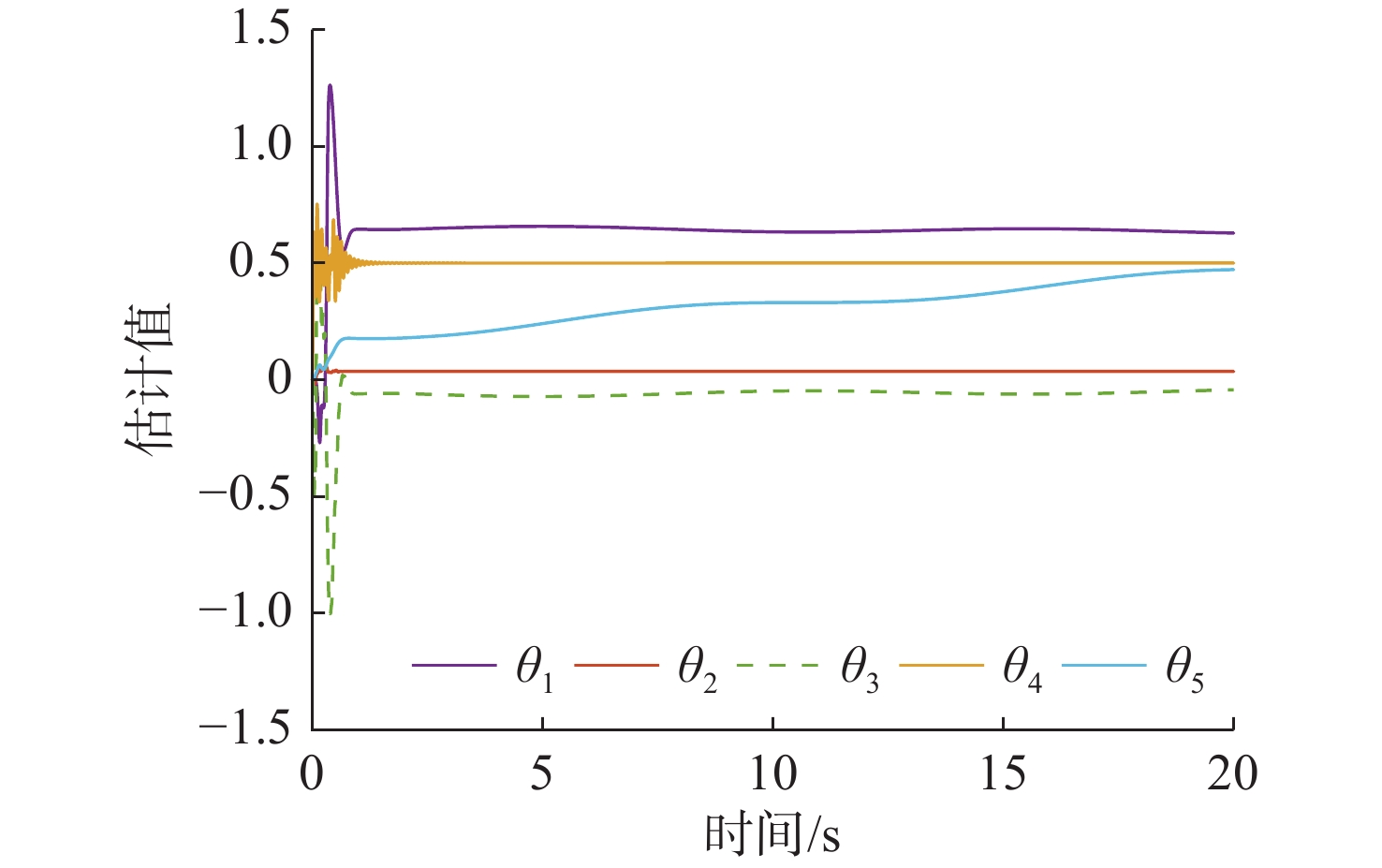
图 8 主端传统自适应参数估计律估计值
Figure 8. Estimation values of traditional adaptive parameter estimation law for master mainpulator
-
[1] ANDERSON R J, SPONG M W. Bilateral control of teleoperators with time delay[J]. IEEE Transactions on Automatic Control, 1989, 34(5): 494-501. doi: 10.1109/9.24201 [2] 杨晛, 陈传志, 华长春. 力反馈水下遥操作系统稳定性分析[J]. 控制理论与应用, 2022, 39(11): 2115-2124. [3] WU Z G, XU Y, LU R, et al. Event-triggered control for consensus of multiagent systems with fixed/switching topologies[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017, 48(10): 1736-1746. [4] WU Z G, SHI P, SU H, et al. Local synchronization of chaotic neural networks with sampled-data and saturating actuators[J]. IEEE Transactions on Cybernetics, 2014, 44(12): 2635-2645. doi: 10.1109/TCYB.2014.2312004 [5] YANG Y, HUA C, GUAN X. Synchronization control for bilateral teleoperation system with prescribed performance under asymmetric time delay[J]. Nonlinear Dynamics, 2015, 81: 481-493. doi: 10.1007/s11071-015-2006-4 [6] KANG Y, LI Z, CAO X, et al. Robust control of motion/force for robotic manipulators with random time delays[J]. IEEE Transactions on Control Systems Technology, 2012, 21(5): 1708-1718. [7] WANG F, WANG T, YU Y, et al. Adaptive synchronization control for robotics teleoperator in the presence of input saturation, uncertainties and time delays[C]//2023 42nd Chinese Control Conference. Tianjin, China: IEEE, 2023: 2282-2287. [8] JING B, NA J, DUAN H, et al. A USDE-based control for bilateral teleoperation systems with time-varying delays[J]. IEEE Transactions on Automation Science and Engineering, 2024, 22: 407-417. [9] 张建军, 刘卫东, 高立娥, 等. 水下机械手不确定遥操作自适应双边控制[J]. 北京航空航天大学学报, 2018, 44(9): 1918-1925. [10] NGUYEN T V, LIU Y C. Advanced finite-time control for bilateral teleoperators with delays and uncertainties[J]. IEEE Access, 2021, 9: 141951-141960. doi: 10.1109/ACCESS.2021.3119578 [11] NA J, HERRMANN G, REN X, et al. Robust adaptive finite-time parameter estimation and control of nonlinear systems[C]//2011 IEEE International Symposium on Intelligent Control. Denver, CO, USA: IEEE, 2011: 1014-1019. [12] NA J, MAHYUDDIN M N, HERRMANN G, et al. Robust adaptive finite-time parameter estimation and control for robotic systems[J]. International Journal of Robust and Nonlinear Control, 2015, 25(16): 3045-3071. doi: 10.1002/rnc.3247 [13] JING B, NA J, GAO G , et al. Robust adaptive control for robotic systems with guaranteed parameter estimation[J]. Lecture Notes in Electrical Engineering, 2016, 399: 341-352. [14] ABIDI K, YILDIZ Y, KORPE B E. Explicit time-delay compensation in teleoperation: An adaptive control approach[J]. International Journal of Robust and Nonlinear Control, 2016, 26(15): 3388-3403. doi: 10.1002/rnc.3513 [15] LIU Y C. Task-space bilateral teleoperation systems for heterogeneous robots with time-varying delays[J]. Robotica, 2015, 33(10): 2065-2082. doi: 10.1017/S0263574714001295 [16] SHEN H, PAN Y J. Improving tracking performance of nonlinear uncertain bilateral teleoperation systems with time-varying delays and disturbances[J]. IEEE/ASME Transactions on Mechatronics, 2019, 25(3): 1171-1181. [17] SPONG M W, HUTCHINSON S, VIDYASAGAR M. Robot modeling and control[M]. New York: Wiley, 2006. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 366
- HTML全文浏览量: 151
- PDF下载量: 64
- 被引次数: 0
图(9)




