Evaluation of Information Usefulness in Human-Computer Interaction Based on Information Template Libraries
-
摘要: 针对无人系统采用传统人机交互度评估时交互内容覆盖不全面的问题, 文中基于对不同语句结构传递信息特点的分析, 提出了信息有用度概念, 并将其纳入人机交互度评估指标体系。以此为基础, 将交互内容的核心要素作为信息模板, 构建了分级分类的信息模板库, 并设计了一种对照信息模板库的信息有用度计算方法,实现交互内容价值的量化评估。案例验证表明了该信息模板库构建的合理性和信息有用度计算方法的有效性, 可为人机交互度评估提供参考和借鉴。Abstract: In response to the problem of incomplete coverage of interactive content in traditional human-computer interaction degree evaluation of unmanned systems, based on the analysis of the characteristics of information transmission in different sentence structures, the concept of information usefulness was proposed and included in the indicator system of human-computer interaction degree evaluation. On this basis, the core elements of interactive content were used as information templates to construct a hierarchically classified library of information templates and design a method for calculating information usefulness by comparing it with the libraries. Quantitative assessment of the value of interactive content was conducted. Case studies verify the rationality of the construction of the information template library and the effectiveness of the information usefulness calculation method, which can provide reference and insights for the evaluation of human-computer interaction degree.
-
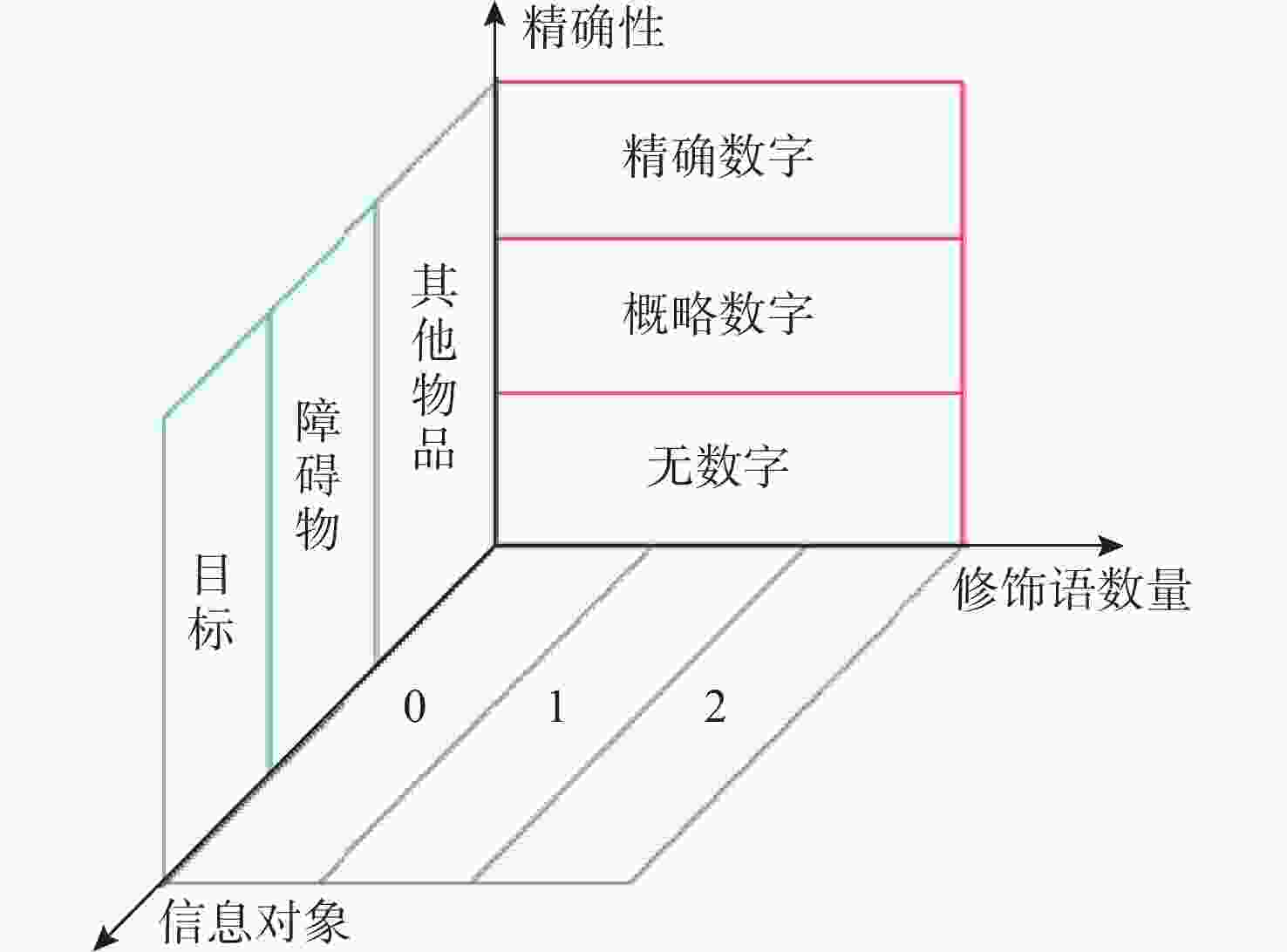
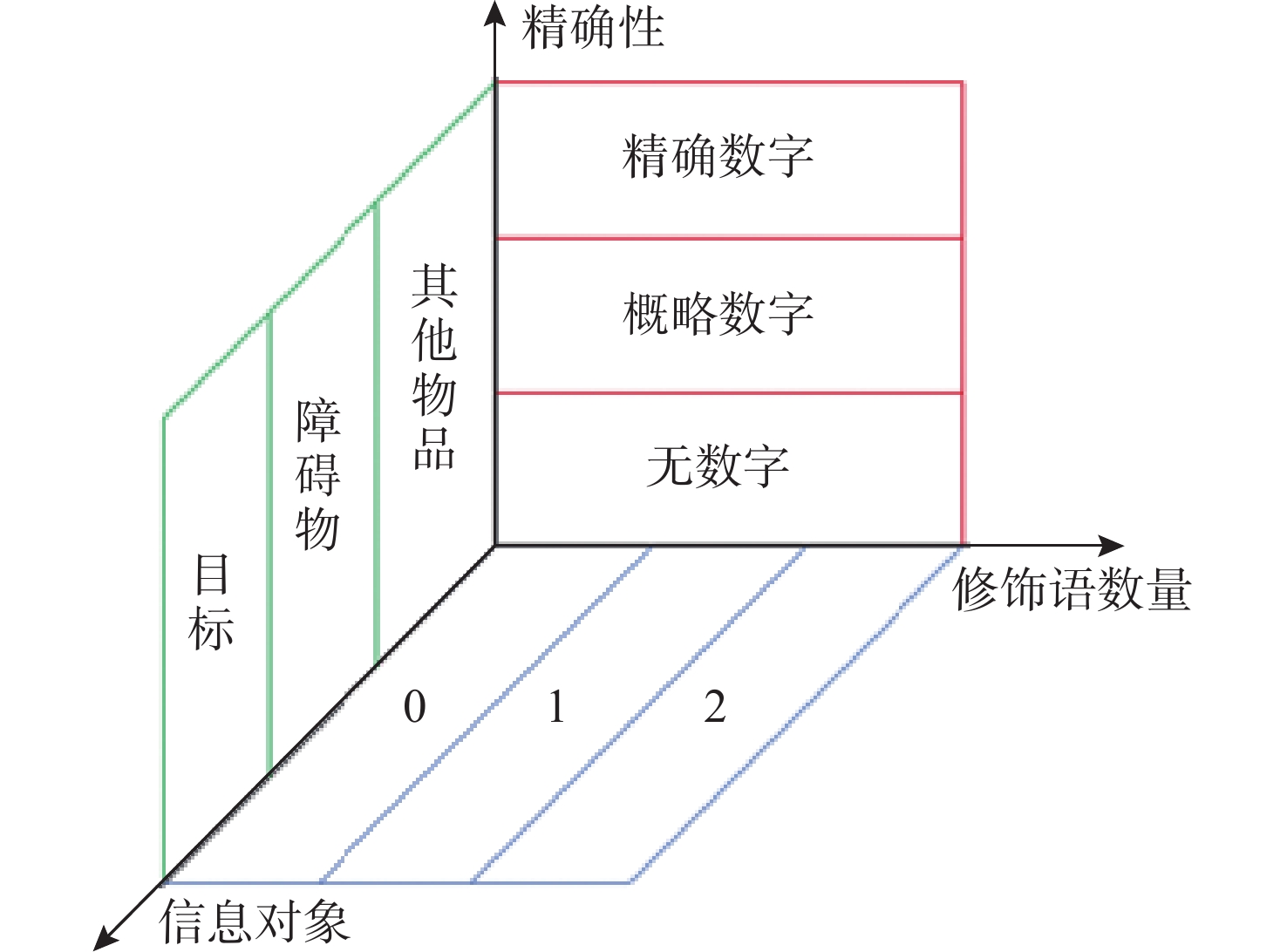
图 1 表征特征类信息三维分解结构图
Figure 1. Three-dimensional decomposition structure of characteristic category information
表 1 表征特征类信息数值量化例表
Table 1. Example of numerical quantification for characteristic description information
序号 信息对象 精确性 修饰语数量 过渡有用度 1 其他物品 无数字 0 1 2 障碍物 概略数字 1 6 3 目标 精确数字 2 11  下载: 导出CSV
下载: 导出CSV
表 2 信息模板库
Table 2. Information template libraries
序号 类别 等级 过渡
有用度有用度 样例1 样例n 1 表征
特征类低等级 1~4 10 任务区最高建筑物高度为N m 障碍物为M形 2 中等级 5~7 20 汽车为M色, 速度为N km/h 目标为M色 3 高等级 8~11 30 电视塔为M形, 高度为N m, 在M方向, 距离为N m 目标为M色, 在M方向, 距离为N m 4 判断
正误类概略否定 40 打击的目标有错误的 视野中的舰艇不是目标 5 精准否定 50 第N个打击目标是错误的 第N个和第N+X个结果是错误的 6 部分肯定 60 第N个打击目标是正确的 红色建筑物为打击目标 7 全部肯定 70 打击的目标均正确 海面上的船只均为目标 8 操控
动作类告知操作
方法及步骤80 向上攀升N m, 前行N m后, 识别目标 向上攀升N m, 前行N m后, 瞄准并打击目标 9 辅助操作 90 向M转N °, 前行N m后, 识别目标 向M转N °, 前行N m后, 瞄准并打击目标 10 接管操控 100 速度提升至N km/h, 保持N min, 识别目标 速度提升至N km/h, 保持N min, 瞄准并打击目标
下载: 导出CSV
表 3 评估科目基础变量取值表
Table 3. Value table of basic variable for evaluation subjects
基础变量 取值 备注 任务区面积/km2 20 — 任务参考时间/min 10 — 要求完成时间/min 9 — 楼房数量 22~56 栋(分6类) — 树木数量 104~380 颗(分3类) — 光照角度/(°) 7.06~8.30 随时间变化 能见度/km 5 — 地表照度/lx 3.38~6.73 随时间变化 时间占有度 0.58 — 频谱占用度 0.76 — 空间覆盖率/% 0.85 — 要求上报精度 0.05 — 参考精度 0.79 — 目标明确面积 参考值8 m2, 实际2 m2 — 目标参数 5个宣传牌, 体积0.5 m3 颜色多样,
表面积1 m2目标变化 种类变化1种(坦克) 数量增加2个,
第3 min发生混淆物与目标的距离/m 29 —
下载: 导出CSV
-
[1] 钟宏伟.国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(4): 215-225.ZHONG H W. Current situation and prospect of foreign unmanned underwater vehicle equipment and technology[J]. Journal of Unmanned Undersea Systems, 2017, 25(4): 215-225. [2] 孙彧, 潘宣宏, 王幸军, 等.无人潜航器装备技术发展及作用运用研究[J]. 舰船科学技术, 2023, 45(11): 104-109.SUN Y, PAN X H, WANG X J, et al. Research on unmanned underwater vehicle technology development and combat application[J]. Ship Science and Technology, 2023, 45(11): 104-109. [3] MICHAEL A G, ALAN C S. Human-robot interaction: A survey[J]. Foundations and Trends in Human-Computer Interaction, 2007, 1(3): 203-275. doi: 10.1561/1100000005 [4] 刘佩林, 陈祥, 牛小明. 无人系统自主性技术研究现状与发展趋势[J]. 兵工自动化, 2022, 41(12): 61-65. doi: 10.7690/bgzdh.2022.12.013LIU P l, CHEN X, NIU X M. Research status and development trends of unmanned system autonomy[J]. Ordnance Industry Automation, 2022, 41(12): 61-65. doi: 10.7690/bgzdh.2022.12.013 [5] 秦荀, 李三军. 美军的自主系统参考框架[J]. 兵工自动化, 2020, 39(1): 6-10, 27.QIN X, LI S J. The autonomous systems reference framework of the U.S. military [J]. Ordnance Industry Automation, 2020, 39(1): 6-10, 27. [6] 李一波, 王新星, 姚宗信, 等. 无人平台自主能力分级的四指标模型[J]. 电光与控制. 2012, 19(10): 34-37, 83.LI Y B, WANG X X, YAO Z X, et al. A four-indicator model for the grading of autonomous capability in unmanned platforms[J]. Electronics Optics & Control, 2012, 19(10): 34-37, 83. [7] 杨哲, 张汝波. 无人系统自主等级模糊评价方法[J]. 小型计算机系统, 2009, 30(10): 2043-2047.YANG Z, ZHANG R B. Fuzzy evaluation method for the autonomy level of unmanned systems[J]. Mini-Micro Systems, 2009, 30(10): 2043-2047. [8] 郑剑. 面向任务的无人作战系统自主性等级评估与分配技术研究[D]. 长沙: 国防科技大学, 2019. [9] 于丽莉, 何明利, 常书杰. 地面无人装备自主作战效能评估方法研究[J]. 军事运筹与系统工程, 2020, 34(3): 26-32.YU L L, HE M L, CHANG S J. Research on the evaluation method for the autonomous combat efficiency of ground unmanned equipment[J]. Military Operations Research and Systems Engineering, 2020, 34(3): 26-32. [10] 施雨轩, 吴泳澎, 张文军. 基于信息论的语义通信: 理论与挑战[J]. 中兴通讯技术, 2023, 29(2): 13-18. doi: 10.12142/ZTETJ.202302004SHI Y X, WU Y P, ZHANG W J. Semantic communication based on information theory: Theories and challenges[J]. ZTE Communications Technology, 2023, 29(2): 13-18. doi: 10.12142/ZTETJ.202302004 [11] KIM H, KO W J, KIM D, et al. User-centered design to enhance university students’ sex and menstrual education in South Korea: Randomized controlled trial[J]. BMC Public Health, 2025, 25(1): 841. doi: 10.1186/s12889-025-21974-3 [12] 百度百科. 信息[EB/OL]. 百度百科, [2025-02-05]. https://baike.baidu.com/item/%E4%BF%A1%E6%81%AF/111163?fr=ge_ala. [13] 张斌. 现代汉语描写语法[M]. 北京: 商务印书馆, 2015: 415-634. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 311
- HTML全文浏览量: 147
- PDF下载量: 62
- 被引次数: 0