

A Data-Driven Front Tracking Algorithm for Autonomous Undersea Vehicles
-
摘要: 针对自主水下航行器(AUV)自适应观测的需求, 设计了一种基于数据驱动的海洋锋面跟踪算法。该算法通过构建基于高斯过程回归(GPR)和粒子群优化(PSO)算法的混合温度场预测模型, 以预采集数据作为先验数据对模型进行训练, 利用PSO算法对核函数中的超参数进行迭代优化, 再将优化后的超参数代入GPR模型, 获得邻近温度场预测结果。计算AUV所在位置与预测区域的温度梯度值, 根据AUV在锋面中的不同位置, 来选择相应的温度梯度跟踪策略, 保持其沿梯度方向运动或是沿等温线跟踪, 实现AUV对锋面的快速跟踪。为了验证算法的有效性, 采用真实锋面数据对该算法进行仿真测试, 结果表明, 该算法相较于其他方法, 在跟踪锋面的准确性和快速性上均有更好的效果, 可以满足AUV高效自主观测的需求。Abstract: To meet the requirement for adaptive observation of autonomous undersea vehicles(AUVs), a data-driven ocean front tracking algorithm was designed. This algorithm constructed a hybrid temperature field prediction model based on Gaussian process regression(GPR) and particle swarm optimization(PSO). Pre-collected data was utilized as prior information to train the model. The PSO algorithm was employed to iteratively optimize the hyperparameters within the kernel function, which were then substituted back into the GPR model to obtain predictions of the adjacent temperature field. By calculating the temperature gradient values between the AUV’s current position and the predicted region, the algorithm selected corresponding temperature gradient tracking strategies based on the AUV’s different positions within the front. This allowed the AUV to maintain motion along the gradient direction or track along isotherms, enabling rapid tracking of the ocean front by the AUV. To validate the effectiveness of the algorithm, simulation tests were conducted using real ocean front data. The results indicate that compared to other methods, this algorithm exhibits superior accuracy and speed in tracking ocean fronts, thereby satisfying the demand for efficient autonomous observation by AUV.
-
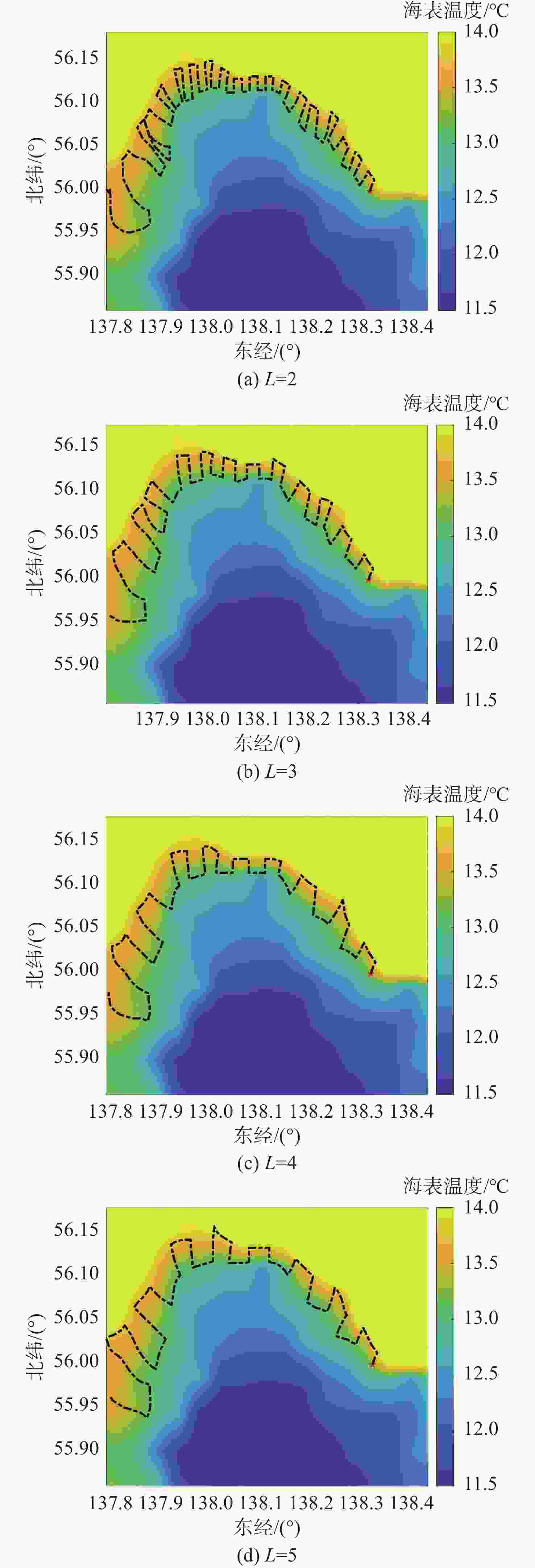
图 10 不同等温线跟踪距离下效果图
Figure 10. Effect diagram under different isotherm tracking distances
表 1 性能指标
Table 1. Performance indicators
算法 总耗时/h MSE “之”字形 7.70 — GPR 24.65 0.0105 PSO-GPR 18.63 0.0037  下载: 导出CSV
下载: 导出CSV
-
[1] 马雨薇, 韩东, 魏尚飞. 海洋锋对潜艇水声通信与探测的影响分析[J]. 电声技术, 2021, 45(1): 22-31.MA Y W, HAN D, WEI S F. The influence of ocean front on submarine acoustic communication and detection[J]. Audio Engineering, 2021, 45(1): 22-31. [2] CHAPMAN C C, LEA M, MEYER A, et al. Defining southern ocean fronts and their influence on biological and physical processes in a changing climate[J]. Nature Climate Change, 2020, 10(3): 209-219. doi: 10.1038/s41558-020-0705-4 [3] SIEGELMAN L, MALCOLM O’T, FLEXAS M, et al. Submesoscale ocean fronts act as biological hotspot for southern elephant seal[J]. Scientific Reports, 2019, 9(1): 1-13. doi: 10.1038/s41598-018-37186-2 [4] 张玉潇, 张宁, 曾宇阳, 等. 水下机器人测试技术及展望[J]. 科技与创新, 2024(16): 49-51. [5] ZHANG Y, RYAN P J, BELLINGHAM G J, et al. Autonomous detection and sampling of water types and fronts in a coastal upwelling system by an autonomous underwater vehicle[J]. Limnology and Oceanography: Methods, 2012, 10(11): 934-951. doi: 10.4319/lom.2012.10.934 [6] BELKIN I, SOUSA J, JOSÉ PINTO, et al. A new front-tracking algorithm for marine robots[C]//2018 IEEE/OES Autonomous Underwater Vehicle Workshop(AUV). Porto, Portugal: IEEE, 2019: 1-3. [7] 关浩博. 数据驱动的水下机器人海洋环境自适应观测研究[D]. 沈阳: 沈阳工业大学, 2021. [8] YAN S, LI Y, FENG X, et al. An AUV adaptive sampling path planning method based on online model prediction[C]//14th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles (CAMS 2020). Berlin, Germany: IFAC CAMS,2020, 53: 323-328. [9] 曲向宇, 李一平. 一种基于温度动态估计的AUV锋面跟踪算法[J]. 海洋技术学报, 2020, 39(4): 29-35.QU X Y, LI Y P. An AUV front tracking algorithm based on temperature dynamic estimation[J]. Journal of Ocean Technology, 2020, 39(4): 29-35. [10] 刘隽. 模块化AUV载体结构设计与操纵性分析[D]. 南昌: 东华理工大学, 2023. [11] 张伟荣, 陈学庚, 齐江涛, 等. 基于深度学习和高斯过程回归的玉米冠下视觉导航路径提取方法[J]. 农业机械学报, 2024, 55(7): 15-26. doi: 10.6041/j.issn.1000-1298.2024.07.002ZHANG W R, CHEN X G, QI J T, et al. Deep learning and Gaussian process regression based path extraction for visual navigation under canopy[J]. Transaction of the Chinese Society for Agricultural Machinery, 2024, 55(7): 15-26. doi: 10.6041/j.issn.1000-1298.2024.07.002 [12] MENKE W, CREEL R. Gaussian process regression reviewed in the context of inverse theory[J]. Surveys in Geophysics, 2021, 42(3): 473-503. doi: 10.1007/s10712-021-09640-w [13] 秦静, 郑德, 裴毅强, 等. 基于PSO-GPR的发动机性能与排放预测方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1489-1498.QIN J, ZHENG D, PEI Y Q, et al. Prediction method of engine performance and emission based on PSO-GPR[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1489-1498. [14] 张金珂, 张建刚. 基于改进粒子群优化算法的信号检测及故障诊断[J]. 山东大学学报(理学版), 2023, 58(5): 63-75.ZHANG J K, ZHANG J G. Signal detection and fault diagnosis based on improved particle swarm optimization algorithm[J]. Journal of Shandong University, 2023, 58(5): 63-75. [15] ZHU M, CHEN B, GU C, et al. Optimized multi-output LSSVR displacement monitoring model for super high arch dams based on dimensionality reduction of measured dam temperature field[J]. Engineering Structures, 2022, 268: 114686. doi: 10.1016/j.engstruct.2022.114686 -

 下载:
下载:











 点击查看大图
点击查看大图
计量
- 文章访问数: 363
- HTML全文浏览量: 127
- PDF下载量: 84
- 被引次数: 0

图(11) / 表(1)




