

Cross-domain Collaborative Application and Technology Development of Maritime Unmanned Systems
-
摘要: 海上无人系统跨域协同是未来海上无人系统的发展趋势和重要的应用方式。随着各种海上无人系统的快速发展和在世界局部战争冲突中的应用, 如何更好地使用海上无人系统跨域完成作战任务成为研究的重点。文中以不同空间域的海上无人系统为研究对象, 梳理总结了当前海上无人系统以及国外海上无人系统跨域运用的发展现状。重点针对海上无人系统的跨域协同运用基本原理和方法进行了分析, 提出了海上无人系统跨域协同运用的关键问题, 并在此基础上梳理了技术发展中需要重点关注的关键技术。最后提出了未来发展的几点启示, 以期为海上无人系统的跨域运用和技术发展提供参考和借鉴。Abstract: Cross-domain collaboration of maritime unmanned systems is the future development trend and important way of application of maritime unmanned systems. With the rapid development of various maritime unmanned systems and their application in local wars and conflicts in the world, how to better use maritime unmanned systems to complete cross-domain combat missions has become the focus of research. With maritime unmanned systems in different spatial domains as the research objects, the current maritime unmanned systems and the development status of cross-domain application of maritime unmanned systems in other countries were summarized. The basic principles and methods of cross-domain collaborative application of maritime unmanned systems were analyzed, and the key issues of cross-domain collaborative application of maritime unmanned systems were put forward. On this basis, the key technologies requiring attention in the development of technologies were sorted out. Finally, several enlightenments for future development were put forward, so as to provide a reference for the cross-domain application and technology development of maritime unmanned systems.
-
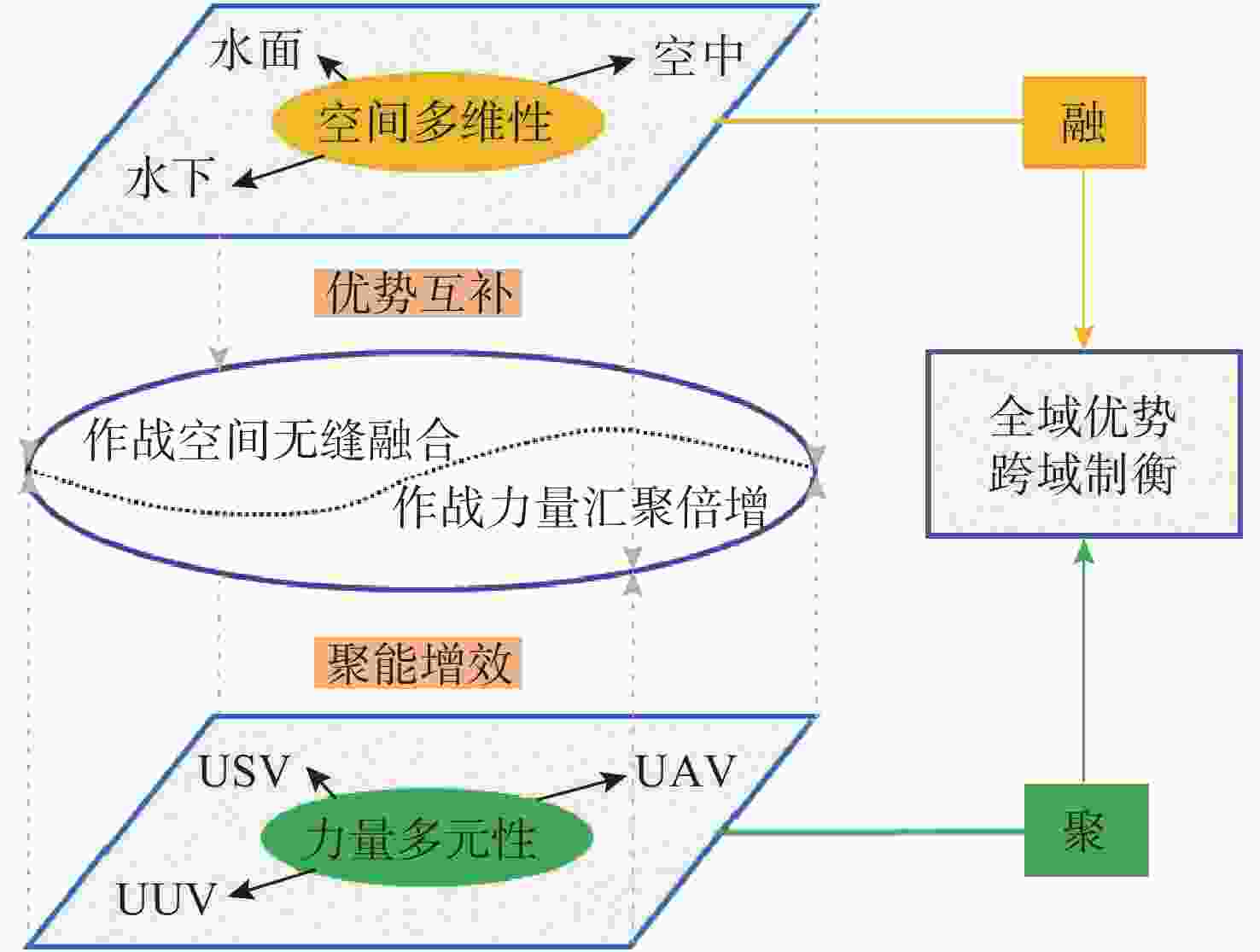
图 1 海上无人系统跨域协同概念内涵示意图
Figure 1. Conceptual connotation of cross-domain collaboration of maritime unmanned systems
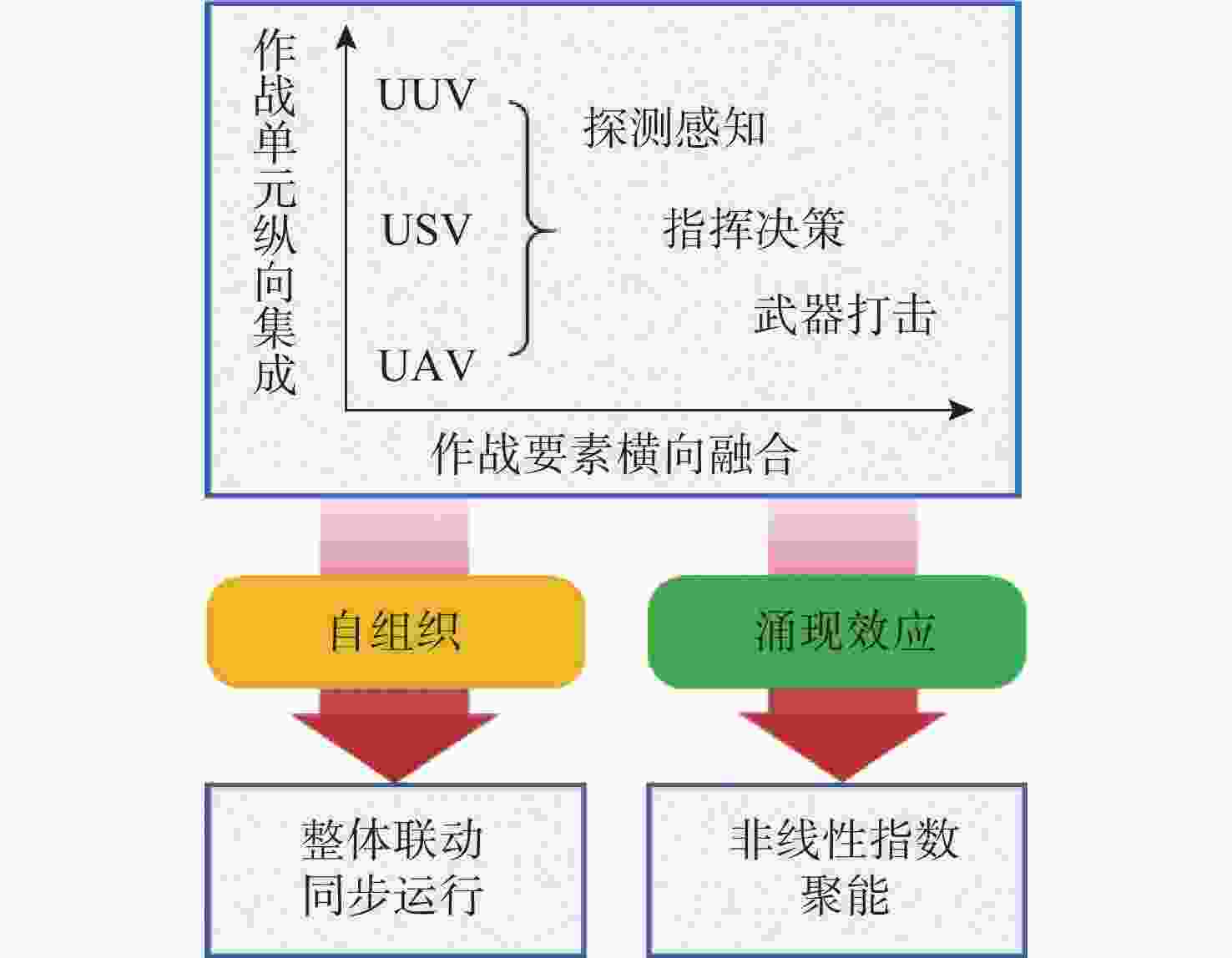
图 2 海上无人系统跨域协同基本原理
Figure 2. Basic principles of cross-domain collaboration of maritime unmanned systems
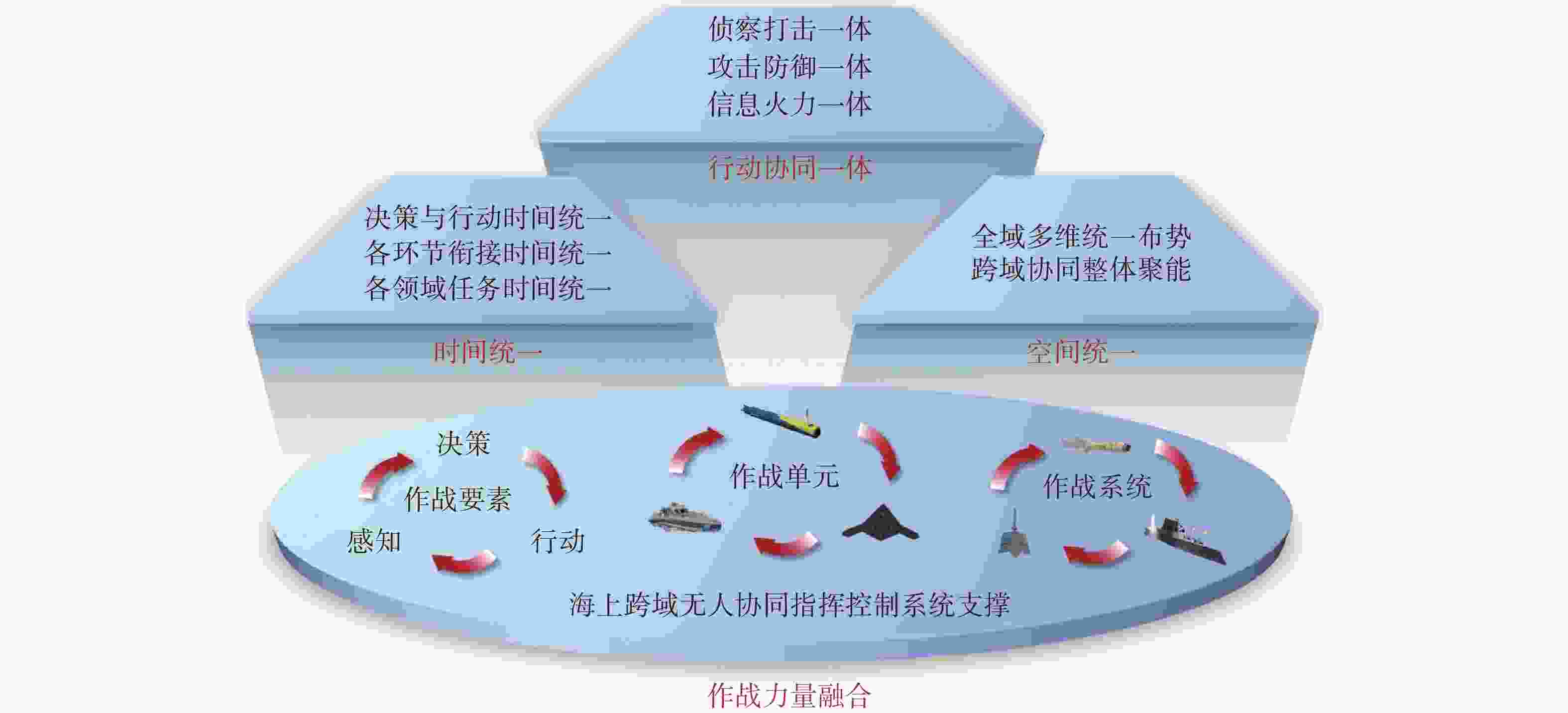
图 3 海上无人系统跨域协同运用
Figure 3. Cross-domain collaborative application of maritime unmanned systems
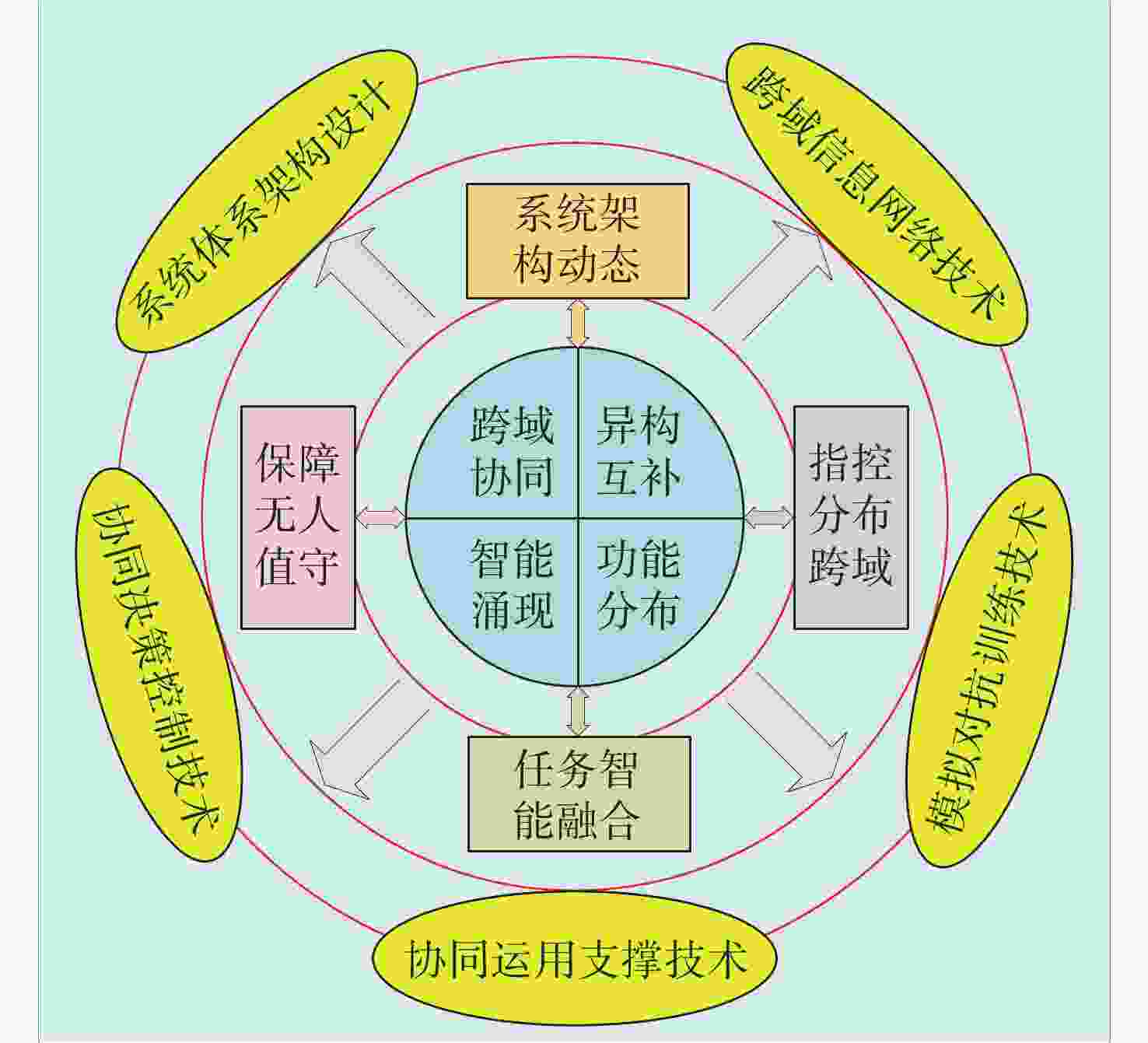
图 4 海上无人系统跨域协同运用关键技术
Figure 4. Key technologies for cross-domain collaborative application of maritime unmanned systems
表 1 美国典型海上无人系统跨域运用技术验证项目
Table 1. Typical technology verification project for cross-domain application of maritime unmanned systems in the United States
年份 名称 无人系统组成 目标及主要内容 2011 DASH 浅海系统(UAV)、深海系统(UUV) 构建多模式反潜系统, 实现广域智能无人探反潜, 完成对部署海域潜艇的警戒、跟踪和追捕 2015 CDMaST UAV、USV、UUV 实现分布式海上作战, 构建面向海洋跨域作战的体系, 改变海军在对抗性环境中投送力量及将敌方舰船与潜艇置于危险中的方式 2016 ACER REMUS 600 UUV、“波浪滑翔者”USV和有人直升机 实现单系统对多个UAV、USV和UUV的指挥控制 2017 OCOMMS USV、“金枪鱼”UUV、“矢量鹰”固定翼UAV 实现无人水下平台与空中平台间双向直连通信, 在水下平台下潜深度超过30 m的情况下, 实现速率不低于1 kByte/s, 距离超过27 km的端到端通信 2018 AMMCS MQ-8B UAV、“波浪滑翔者”USV、REMUS 100/“激流”/IVER UUV 利用AMMCS控制6型无人平台定位并模拟攻击水下目标, 演示UUV、USV和UAV间的端到端跨域连接与协同指控  下载: 导出CSV
下载: 导出CSV
表 2 国外典型跨域无人系统应用验证演习项目
Table 2. Typical verification projects for cross-domain application of unmanned systems abroad
年份 名称 无人系统组成 目标及主要内容 2016 “无人
战士”50多个异构海上无人平台(UAV、USV、UUV) 验证跨域无人系统情报、监视和侦查任务、反潜作战任务、水雷反制任务能力 2016
2017
2019ANTX UAV、USV、UUV 演示协同作战与跨域指挥通信能力, 构建水下协同探测与攻击系统, 实现协同组网、行动协同、任务协同、有无人协同迭代发展, 验证基本的侦察、反潜、反水雷、护航等任务能力 2019 OCEAN 2020 异构UAV、USV、UUV 实现海上监视与拦截任务, 验证跨域异构无人平台互操作性、多源信息融合与海事图像识别 2021 UxSIBP21 MQ-9B“海上卫士”UAV、中型USV、“科罗拉多”号(LCS-4)濒海战斗舰 探索有人与无人系统在全域作战中的配合运用方式 2022 IMX22 有人舰艇与80多型空中、水下无人系统 验证跨域异构平台互操作性、协同态势感知和跨介质通信能力 2022 RIMPAC-2022 4艘USV及多型UAV 测试跨域无人系统数据通信及组网能力
下载: 导出CSV
-
[1] 邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关键技术分析[J]. 水下无人系统学报, 2023, 31(1): 1-9.Qiu Zhiming, Ma Yan, Meng Xiangyao, et al. Analysis on the development trend and key technologies of unmanned underwater equipment[J]. Journal of Unmanned Undersea System, 2023, 31(1): 1-9. [2] 邱志明, 孟祥尧, 马焱, 等. 海上无人系统发展及关键技术研究[J]. 中国工程科学, 2023, 25(3): 74-83. doi: 10.15302/J-SSCAE-2023.03.005Qiu Zhiming, Meng Xiangyao, Ma Yan, et al. Development and key technologies of maritime unmanned systems[J]. Strategic Study of CAE, 2023, 25(3): 74-83. doi: 10.15302/J-SSCAE-2023.03.005 [3] Bultmann S, Quenzel J, Behnke S. Real-time multi-modal semantic fusion on unmanned aerial vehicles with label propagation for cross-domain adaptation[J]. Robotics and Autonomous Systems, 2023(159): 104286-104302. [4] 何玉庆, 秦天一, 王楠. 跨域协同: 无人系统技术发展和应用新趋势[J]. 无人系统技术, 2021, 4(4): 1-13.He Yuqing, Qin Tianyi, Wang Nan. Cross-domain Collaboration: New trends in the development and application of unmanned systems technology[J]. Unmanned Systems Technology, 2021, 4(4): 1-13. [5] 谢全, 陈琨. 联合作战制胜机理[M]. 北京: 兵器工业出版社, 2022. [6] 宋保维, 潘光, 张立川, 等. 自主水下航行器发展趋势及关键技术[J]. 中国舰船研究, 2022, 17(5): 27-44.Song Baowei, Pan Guang, Zhang Lichuan, et al. Development trend and key technologies of autonomous underwater vehicles[J]. Chinese Journal of Ship Research, 2022, 17(5): 27-44. [7] 唐波, 孟荻, 范文涛. 水面无人艇在水面舰艇编队水下防御的发展展望[J]. 数字海洋与水下攻防, 2022, 5(2): 121-126.Tang Bo, Meng Di, Fan Wentao. Development prospect of unmanned surface vehicle in underwater defense of surface ship formation[J]. Digital Ocean & Underwater Warfare, 2022, 5(2): 121-126. [8] 冯炜, 崔东华, 夏天冰, 等. 国外无人船集群运用特点分析及其应对启示[J]. 中国舰船研究, 2023, 18(1): 1-12.Feng Wei, Cui Donghua, Xia Tianbing, et al. Analysis of characteristics of foreign unmanned surface vehicle swarm combat application and proposed countermeasures[J]. Chinese Journal of Ship Research, 2023, 18(1): 1-12. [9] 李姝, 裘昌利, 栾爽, 等. 美军无人系统发展规划研究综述[J]. 无人系统技术, 2023, 6(6): 101-108.Li Shu, Qiu Changli, Luan Shuang, et al. Review on unmanned systems integrated roadmap by DoD[J]. Unmanned Systems Technology, 2023, 6(6): 101-108. [10] 冯景祥, 谢飞跃, 张平, 等. 美海上分布式作战研究现状及发展趋势[C]//第九届中国指挥控制大会. 北京: 中国指挥与控制学会, 2021. [11] 黄东亮, 张铁军, 戴苏榕, 等. 美国跨域作战体系研究[J]. 航空电子技术, 2021, 52(2): 22-26.Huang Dongliang, Zhang Tiejun, Dai Surong, et al. U. S. cross-domain operations system research[J]. Avionics Technology, 2021, 52(2): 22-26. [12] 邓鹏, 丁浩, 张永, 等. 基于“马赛克战”的水下有人-无人作战使用探讨[J]. 舰船科学技术, 2024, 46(1): 186-189.Deng Peng, Ding Hao, Zhang Yong, et al. Discussion on combat using mode of underwater manned and unmanned swarm based on mosaic warfare[J]. Ship Science and Technology, 2024, 46(1): 186-189. [13] Carberry S. Defense innovation unit spinning space web for JADC2[J]. National defense, 2023, 838(9): 108. [14] 张辉意, 景东风, 王心亮, 等. 国外海上无人系统研究现状及趋势[C]//第五届水下无人系统技术高峰论坛. 西安: 《水下无人系统学报》编辑部, 2022. [15] 孟祥尧, 马焱, 曹渊, 等. 海洋维权无人装备发展研究[J]. 中国工程科学, 2020, 22(6): 49-55. doi: 10.15302/J-SSCAE-2020.06.007Meng Xiangyao, Ma Yan, Cao Yuan, et al. Development of unmanned equipment in marine rights protection[J]. Strategic Study of CAE, 2020, 22(6): 49-55. doi: 10.15302/J-SSCAE-2020.06.007 [16] 初军田, 张武, 丁超, 等. 跨域无人系统协同作战需求分析[J]. 指挥信息系统与技术, 2022, 13(6): 1-8.Chu Juntian, Zhang Wu, Ding Chao, et al. Requirement analysis on cross-domain unmanned system cooperative operation[J]. Command Information System and Technology, 2022, 13(6): 1-8. [17] 王小军, 张修社, 胡小全, 等. 基于杀伤链感知的动态可重构作战体系结构[J]. 现代导航, 2020(4): 235-243.Wang Xiaojun, Zhang Xiushe, Hu Xiaoquan, et al. Dynamic reconfigurable combat architecture based on kill chain perception[J]. Modern Navigation, 2020(4): 235-243. [18] 全杰, 贺庆. 跨域融合机理与运用研究[J]. 中国电子科学研究院学报, 2021, 16(12): 1205-1214.Quan Jie, He Qing. Research on mechanism and application of cross-domain synergy[J]. Journal of China Academy of Electronics and Information Technology, 2021, 16(12): 1205-1214. [19] 孟祥辉, 刘青峰, 李晨阳, 等. 两栖作战无人装备跨域协同运用研究[J]. 中国电子科学研究院学报, 2022, 17(10): 1032-1036.Meng Xianghui, Liu Qingfeng, Li Chenyang, et al. Amphibious operation unmanned equipment cross-domain collaboration application research[J]. Journal of China Academy of Electronics and Information Technology, 2022, 17(10): 1032-1036. [20] 曹璐, 胡红波. 协同反水雷作战任务规划系统总体研究[J]. 数字海洋与水下攻防, 2022(2): 115-120.Cao Lu, Hu Hongbo. Research on mission planning system of cooperative mine countermeasures[J]. Digital Ocean & Underwater Warfare, 2022(2): 115-120. [21] 李松, 张春华, 孙煜飞, 等. 美军无人系统跨域协同作战能力发展研究[J]. 中国电子科学研究院学报, 2023, 18(3): 284-288.Li Song, Zhang Chunhua, Sun Yufei, et al. Development of U. S. armed forces's unmanned systems cross-domain collaborative combat capability[J]. Journal of China Academy of Electronics and Information Technology, 2023, 18(3): 284-288. [22] 包维, 况阳. 海军无人平台通信技术研究[J]. 舰船科学与技术, 2022, 44(19): 129-133.Bao Wei, Kuang Yang. Research on naval unmanned platform communication technology[J]. Ship Science and Technology, 2022, 44(19): 129-133. [23] 殷双斌, 周林. 面向作战云的联合作战装备体系架构总体构想[J]. 军事运筹与评估, 2022, 37(4): 45-50.Yin Shuangbin, Zhou Lin. General concept of joint combat equipment architecture system for the combat cloud[J]. Military Operations Research and Assessment, 2022, 37(4): 45-50. [24] 李杰, 尹栋, 喻煌超, 等. 无人化联合战术跨域协同及规划能力发展[J]. 国防科技, 2023, 44(2): 82-89.Li Jie, Yin Dong, Yu Huangchao, et al. Discussion on the development of tactical level cross-domain synergy and planning capability of unmanned joint tactics[J]. National Defense Science & Technolog, 2023, 44(2): 82-89. [25] 王苗, 陈奇, 饶世钧. 基于虚实一体的舰艇编队战术训练系统设计[J]. 舰船电子工程, 2022, 42(3): 119-123.Wang Miao, Chen Qi, Rao Shijun. Design of warship formation training system based on virtual-real training integration[J]. Ship Electronic Engineering, 2022, 42(3): 119-123. [26] 吴鑫辉, 王成飞, 董亚卓. 海上跨域无人系统互联互通互操作标准符合性测试评估系统构建研究[J]. 信息化研究, 2023, 49(4): 37-42.Wu Xinhui, Wang Chengfei, Dong Yazhuo. Design of the interoperable standard conformance test system for unmanned maritime systems[J]. Informatization Research, 2023, 49(4): 37-42. [27] 徐同乐, 肖玉杰, 何翼, 等. 海洋自主无人系统跨域通信组网技术发展[J]. 指挥与控制学报, 2023, 9(6): 683-691.Xu Tongle, Xiao Yujie, He Yi, et al. Development of cross-domain communication networking technologies for marine autonomous unmanned system[J]. Journal of Command and Control, 2023, 9(6): 683-691. [28] 梁晓龙, 王宁, 王维佳, 等. 海上跨域无人集群研究进展综述[J]. 空军工程大学学报, 2023, 24(5): 2-15.Liang Xiaolong, Wang Ning, Wang Weijia, et al. Progress in maritime cross-domain manned swarms[J]. Journal of Air Force Engineering University, 2023, 24(5): 2-15. [29] 杨中源, 赵启兵, 葛友滨, 等. 海上无人集群发展及技术体系研究[J]. 舰船科学技术, 2024, 46(2): 53-56.Yang Zhongyuan, Zhao Qibing, Ge Youbin, et al. Research on the development and technical system of maritime unmanned cluster[J]. Ship Science and Technology, 2024, 46(2): 53-56. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 3104
- HTML全文浏览量: 709
- PDF下载量: 527
- 被引次数: 0





