

Model-Free Adaptive Path Tracking Control Based on Active Disturbance Rejection Control for AUVs
-
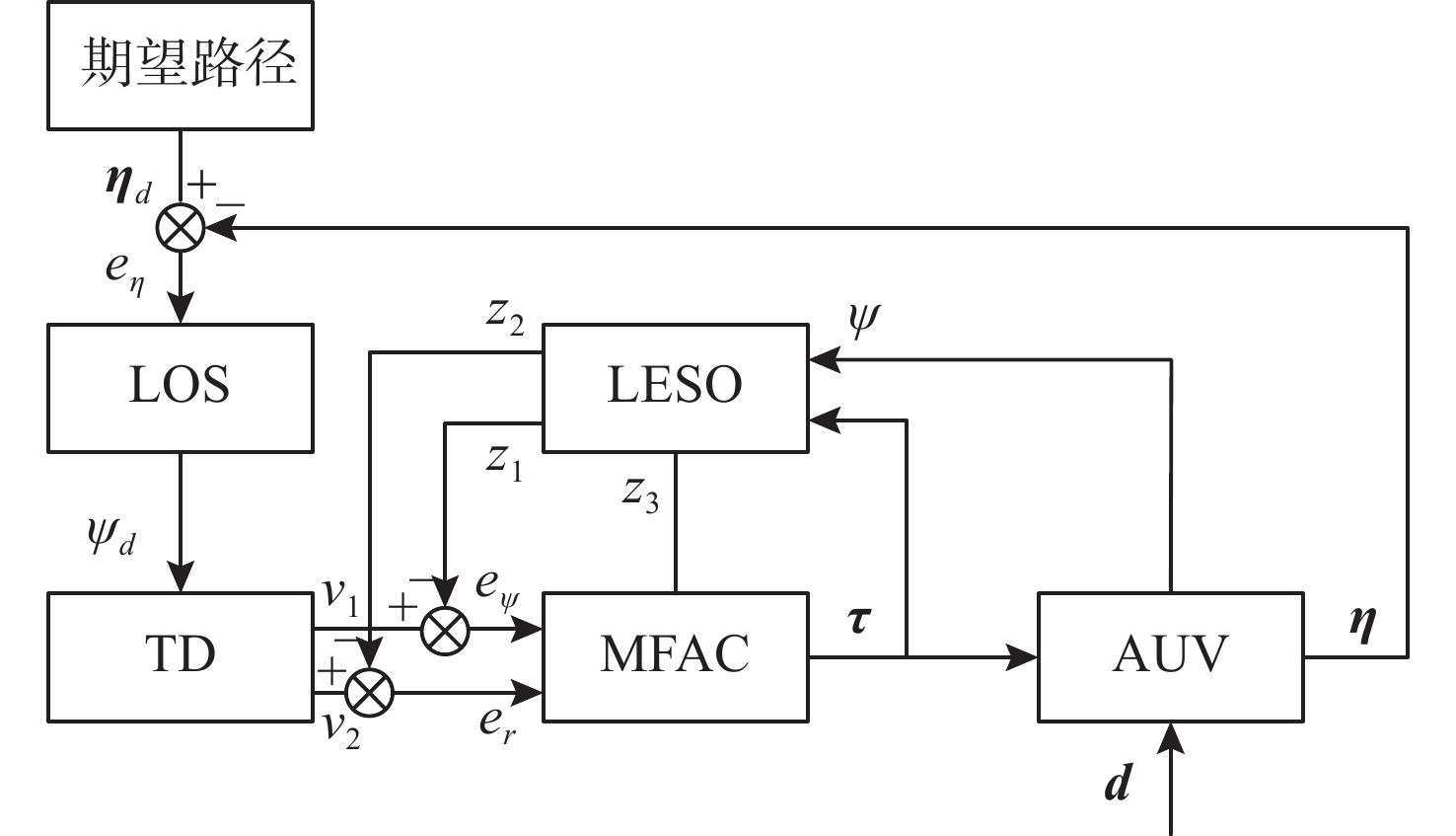
摘要: 面向自主水下航行器(AUV)精准回收的任务需求, 针对AUV运动中模型不确定性、易受环境干扰导致的路径跟踪精度不足的问题, 从无模型控制的角度出发, 提出了一种适用于AUV的基于自抗扰控制理论的无模型自适应控制(ADRC-MFAC)算法。该算法针对2阶系统模型特性, 结合视线角制导重新设计控制输入准则函数对无模型自适应控制(MFAC)进行了改进, 解决了MFAC只适用于自衡系统的问题。引入跟踪微分器对期望信号进行指令平滑, 考虑未知复合干扰的影响设计了线性扩张状态观测器, 在控制器中对估计扰动进行补偿, 并证明了所提控制器的稳定性, 提升了系统鲁棒性。在同样的干扰情况下, 文中控制方案相比传统比例-积分-微分控制器抗干扰能力提升了42.37%, 控制精度提高了45%, 表明ADRC-MFAC能够明显改善AUV的抗干扰性能, 提高路径跟踪精度。Abstract: In view of the task requirements of accurate recovery of autonomous undersea vehicles(AUVs), a model-free adaptive control based on the active disturbance rejection control(ADRC-MFAC) algorithm was proposed from the perspective of model-free control, so as to improve the insufficient path tracking accuracy caused by model uncertainty and vulnerability to environmental interference in AUV motion. According to the characteristics of the second-order model system and line-of-sight guidance, the MFAC was improved by redesigning the control input criterion function, solving the problem that MFAC was only applicable to the self-balancing system. A tracking differentiator was introduced to smooth the desired signal, and a linear extended state observer was designed by considering the influence of unknown compound interference. The estimated disturbance was compensated for in the controller. The stability of the controller was verified, and system robustness was improved. Under the same interference, the proposed control scheme could improve the anti-interference ability and control precision by 42.37% and 45%, compared with the traditional proportional-integral-differential controller. The result shows that ADRC-MFAC can significantly improve the anti-interference performance of AUVs and enhance path tracking accuracy.
-
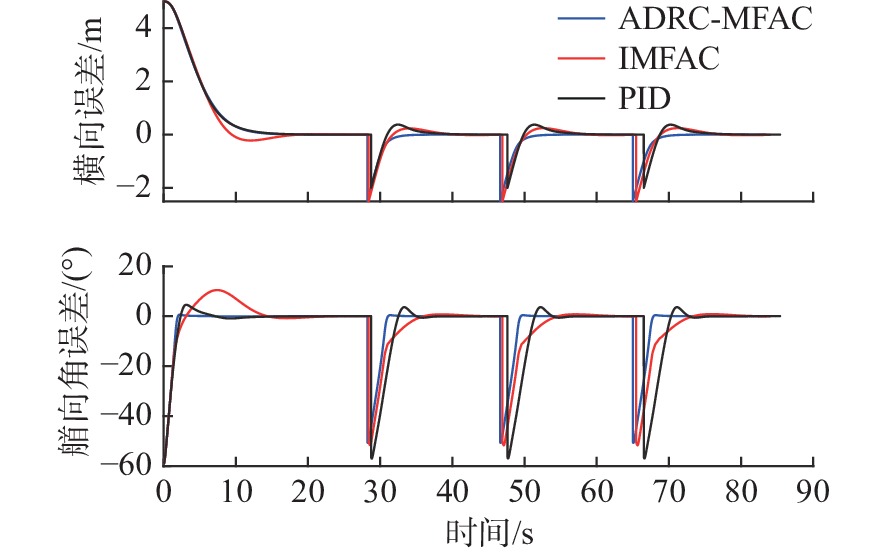
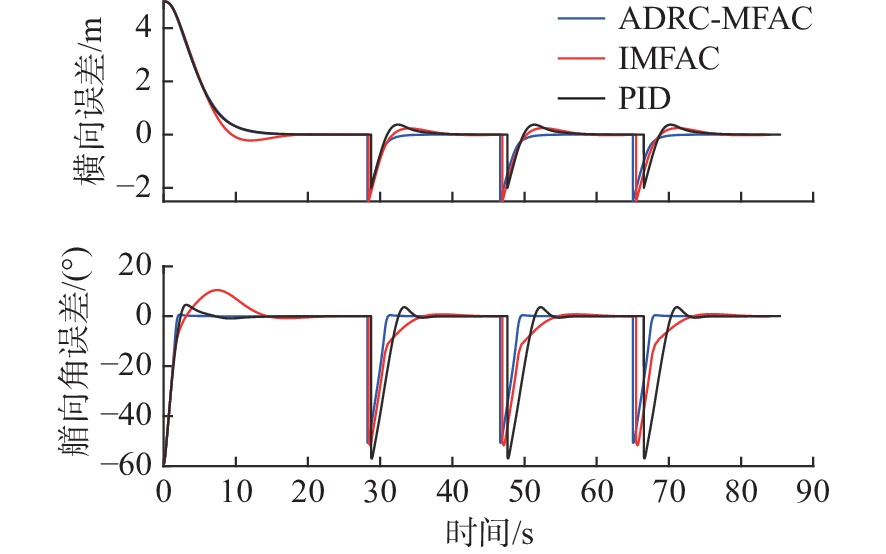
图 5 多航点路径跟踪偏距和艏向角误差对比曲线
Figure 5. Comparison between tracking errors and heading angle errors of multiple waypoints path tracking
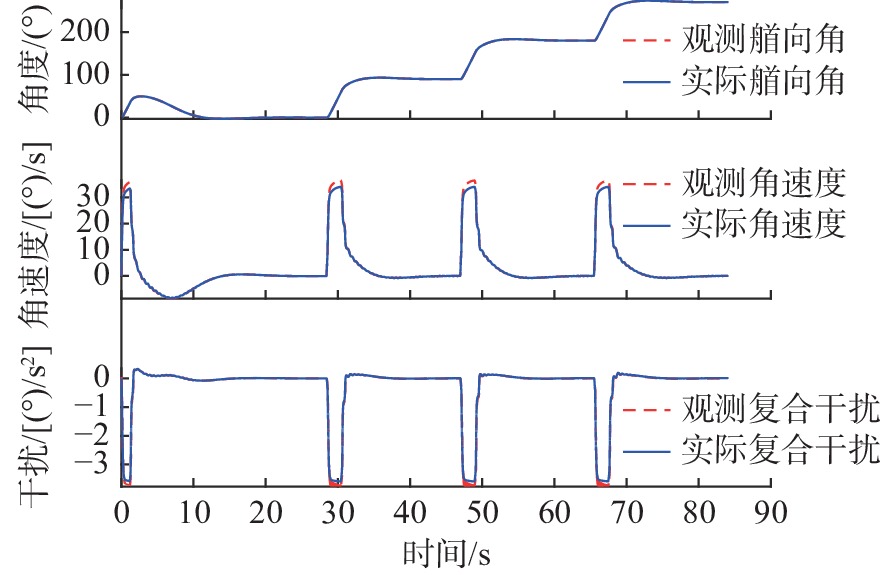
图 6 多航点路径跟踪实际值和估计值对比曲线
Figure 6. Comparison between true and estimation values of multiple waypoints path tracking
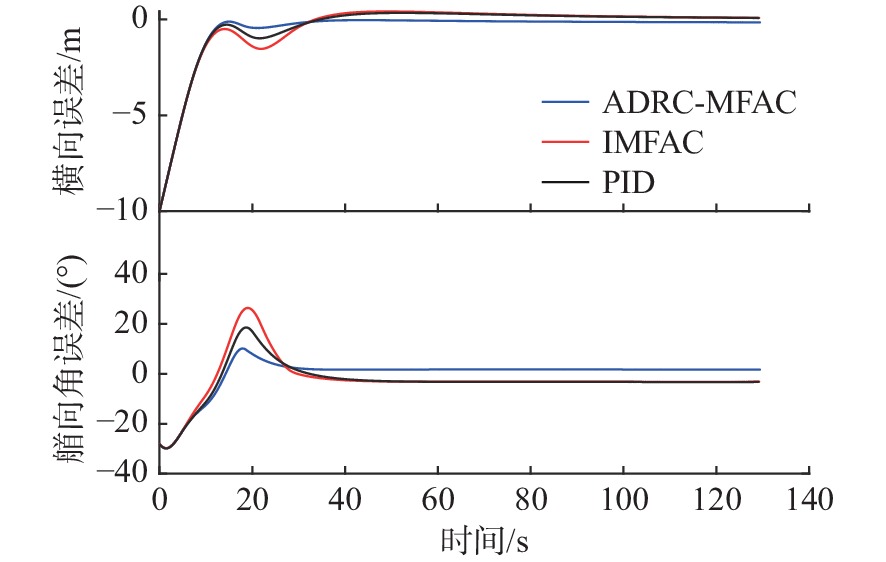
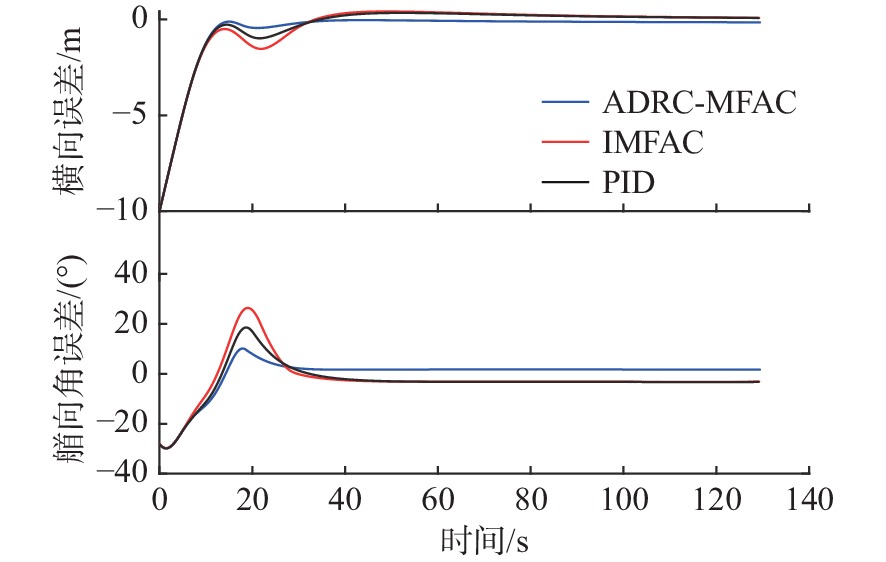
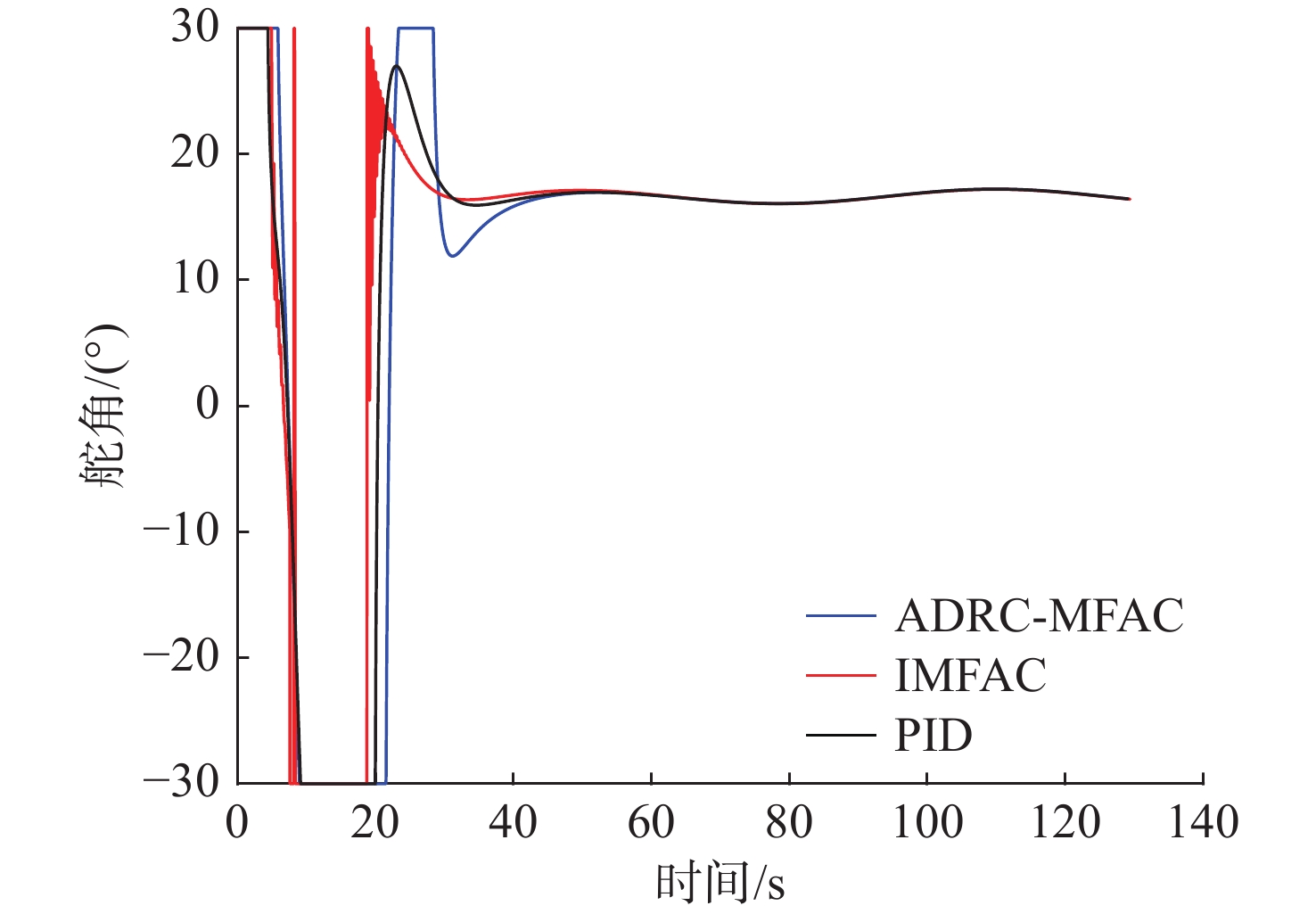
图 9 圆路径跟踪偏距和艏向角误差曲线
Figure 9. Comparison between tracking errors and heading angle errors of circle path tracking
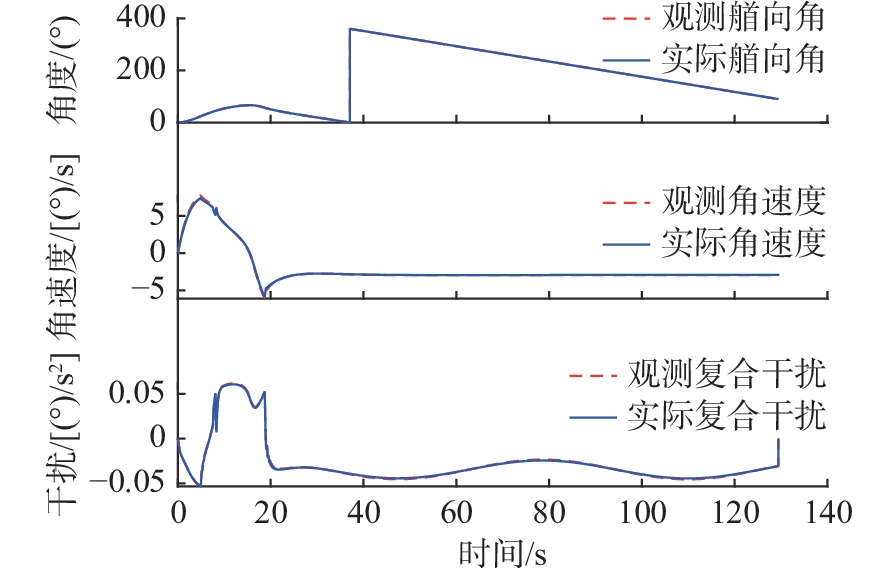
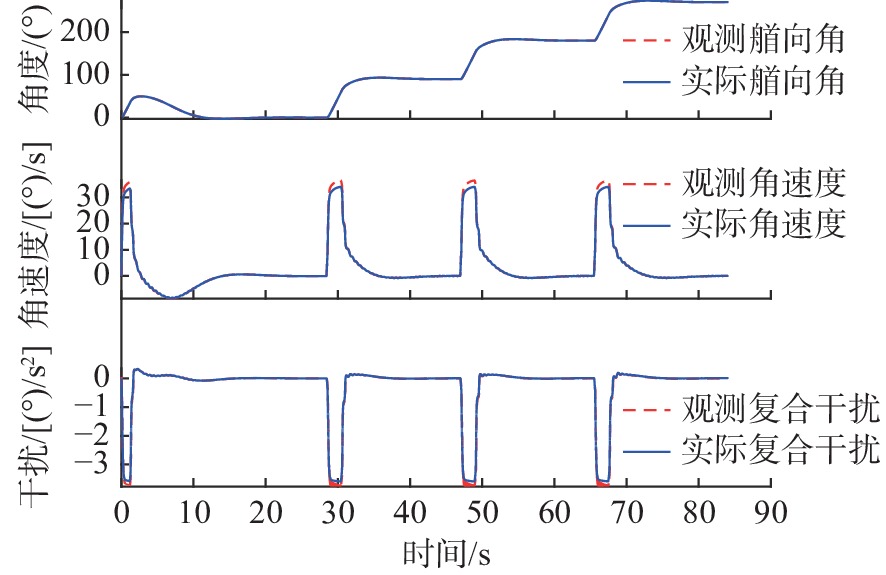
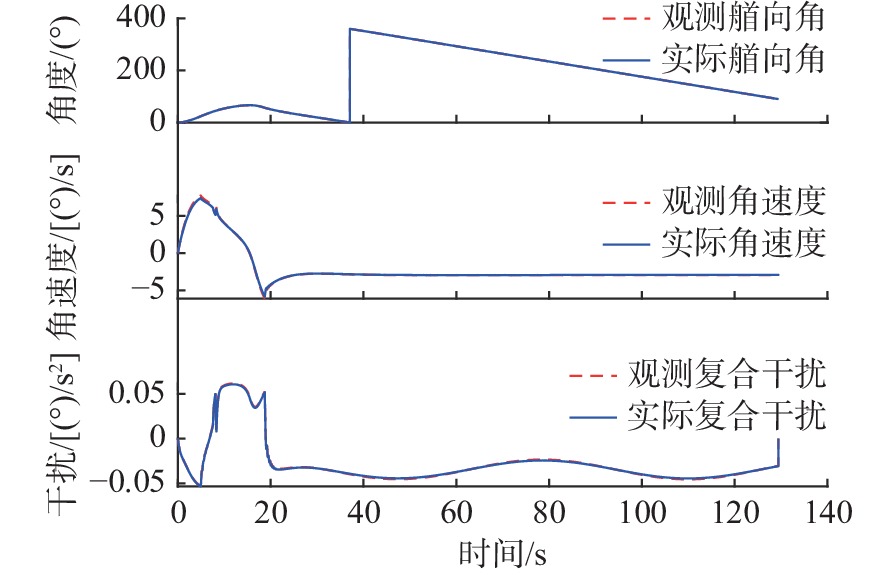
图 10 圆路径跟踪实际值和估计值曲线
Figure 10. Comparison between true and estimation values of circle path tracking
表 1 AUV模型参数列表
Table 1. Model Parameters of AUV
名称 参数 名称 参数 m/kg 30.48 $ {I_z} $/(kg·m2) 3.45 $ {X_u} $/(Ns/m) −13.5 $ {N_{\dot r}} $/(kg·m2/rad) −4.88 $ {Y_v} $/(Ns/m) −66.6 $ {X_{u|u|}} $/(Ns2/m2) −1.62 $ {N_r} $/(Ns/rad) −5.98 $ {Y_{v|v|}} $/(Ns2/m2) −131 $ {X_{\dot u}} $/kg −0.93 $ {N_{r|r|}} $/(Ns2/rad2) −94 $ {Y_{\dot v}} $/kg −35.5 — —  下载: 导出CSV
下载: 导出CSV
表 2 多航点路径跟踪性能指标
Table 2. Performance index of multiple waypoints path tracking
指标 PID IMFAC ADRC-MFAC 艏向超调量/(°) 4.580 10.47 0.61 艏向调节时间/s 11.960 22.08 2.51 艏向稳态误差/(°) 0 0.07 0 偏距平均误差/m 0.350 0.420 0.320 偏距稳态误差/m 0.001 0.001 0
下载: 导出CSV
表 3 圆路径跟踪性能指标
Table 3. Performance index of circle path tracking
指标 PID IMFAC ADRC-MFAC 艏向超调量/(°) 20.13 27.87 11.62 艏向调节时间/s 44.63 43.87 30.69 艏向稳态误差/(°) 3.11 3.21 1.71 偏距平均误差/m 0.42 0.47 0.35 偏距稳态误差/m 0.17 0.23 0.13
下载: 导出CSV
-
[1] Neira J, Sequeiros C, Huamani R, et al. Review on unmanned underwater robotics, structure designs, materials, sensors, actuators, and navigation control[J]. Journal of Robotics, 2021, 18(6): 1-26. [2] 宋保维, 潘光, 张立川, 等. 自主水下航行器发展趋势及关键技术[J]. 中国舰船研究, 2022, 17(5): 27-44. [3] Cao X, Sun H, Guo L. Potential field hierarchical reinforcement learning approach for target search by multi-AUV in 3D underwater environments[J]. International Journal of Control, 2022(7a9): 1677-1683. [4] 李锦江. 海洋无人航行器预设性能运动控制技术研究 [D]. 武汉: 华中科技大学, 2022. [5] Yu C, Xiang X, Dai J. 3D path following for under-actuated AUV via nonlinear fuzzy controller[C]//Oceans 2016. Shanghai: IEEE, 2016. [6] Elmokadem T, Zribi M, Youcef-Toumi K. Terminal sliding mode control for the trajectory tracking of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2017, 129: 613-625. doi: 10.1016/j.oceaneng.2016.10.032 [7] Wang Z, Guan X, Liu C, et al. Acoustic communication and imaging sonar guided AUV docking: System infrastructure, docking methodology and lake trials[J]. Control Engineering Practice, 2023(136): 105-129. [8] 田涛涛, 侯忠生, 刘世达, 等. 基于无模型自适应控制的无人驾驶汽车横向控制方法[J]. 自动化学报, 2017, 43(11): 1931-1940. [9] 高鹏, 万磊, 徐钰斐, 等. 基于无模型自适应控制的底栖式AUV 路径点跟踪控制[J]. 水下无人系统学报, 2022, 30(4): 429-440. doi: 10.11993/j.issn.2096-3920.202109021Gao Peng, Wan Lei, Xu Yufei, et al. Waypoint-tracking control of a benthic AUV based on model-free adaptive control method[J]. Journal of Unmanned Undersea Systems, 2022, 30(4): 429-440. doi: 10.11993/j.issn.2096-3920.202109021 [10] Li X, Ren C, Ma S, et al. Compensated model-free adaptive tracking control scheme for autonomous underwater vehicles via extended state observer[J]. Ocean Engineering, 2020, 217(9): 107-217. [11] Fossen T I. Line-of-sight path-following control utilizing an extended Kalman filter for estimation of speed and course over ground from GNSS positions[J]. Journal of Marine Science and Technology, 2022, 27: 806-813. doi: 10.1007/s00773-022-00872-y [12] 侯忠生, 金尚泰. 无模型自适应控制[M]. 北京: 科学出版社, 2013. [13] 韩京清. 自抗扰控制技术[J]. 前沿科学, 2007(1): 24-31. doi: 10.3969/j.issn.1673-8128.2007.01.004 [14] Fossen T I. Handbook of marine craft hydrodynamics and motion control[M]. UK: John Wiley & Sons Inc, 2011. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1003
- HTML全文浏览量: 572
- PDF下载量: 151
- 被引次数: 0





