

Target Surround Tracking Method of USVs Based on Perception Information
-
摘要: 无人水面艇(USV)作为一种智能水面工具, 可实现航行控制、水面目标识别与感知等基本功能, 但伴随着工程需求的多元化, 如水面失事货轮、未知船只特征识别、失事飞机等搜救探测任务, 该基本功能已无法完成任务, 因此需要开展一种可对目标进行稳定跟踪并完成360°环视的方法研究。文中提出一种基于感知目标信息, 通过对目标环绕跟踪,实现目标检测的方法。在对感知信息进行目标运动状态估计后, 采用虚拟目标点跟踪算法计算出期望航向及速度, 通过航向控制器及速度控制器实现对USV的位姿控制, 同时加入重规划跟踪策略, 以适应水面复杂环境并感知设备提供信息的误差扰动。以USV模型辨识方法获得模型并搭建仿真平台进行仿真验证, 通过实航试验测试证明该算法设计的合理性。Abstract: Unmanned surface vehicle(USV), as an intelligent surface tool, can realize basic functions such as navigation control, as well as surface target recognition and perception. However, with the diversification of engineering requirements, such as search and rescue missions oriented to wrecked freighter, unknown ship feature recognition, and wrecked aircraft, these basic functions fail to complete the task. Therefore, it is necessary to develop a method to track the target stably and complete 360-degree scanning. In this paper, based on the perceptual target information, a target surround tracking method was proposed for target detection. After estimating the target motion state from the sensing information, the virtual target point tracking algorithm was used to calculate the desired heading and velocity. The heading controller and speed controller were used to control the position and attitude of the USV. At the same time, a re-planning and tracking strategy was added to adapt to the complex environment of the water surface and the error disturbance of the information provided by the sensing equipment. The USV model identification method was used to obtain the model and build a simulation platform for simulation verification. The actual flight test proves the rationality of the algorithm design.
-

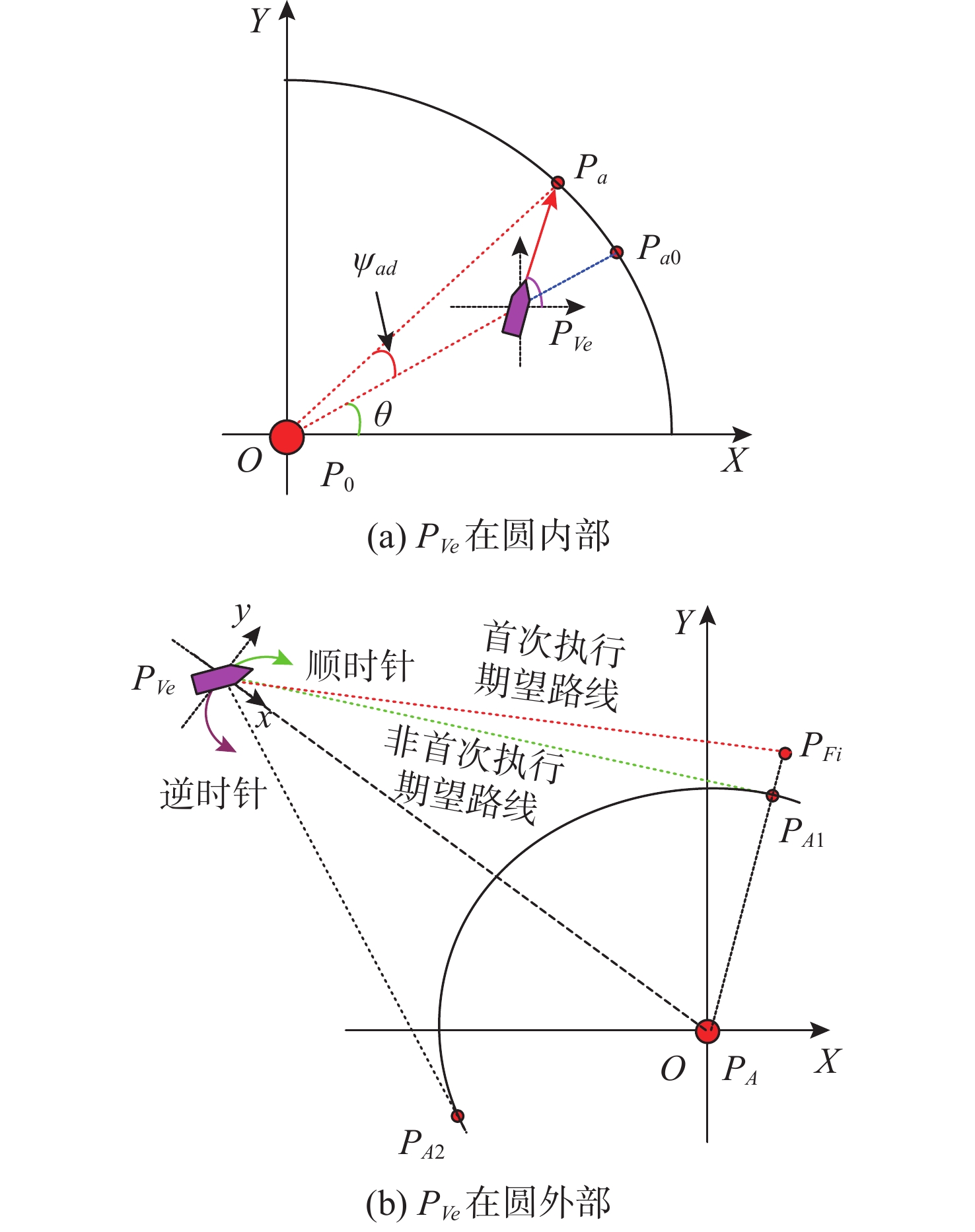
图 5 动态虚拟目标点切换判据原理图
Figure 5. Principle of dynamic virtual target point swiching criterion
-
[1] 黄琰, 李岩, 俞建成, 等. AUV智能化现状与发展趋势[J]. 机器人, 2020, 42(2): 215-231. doi: 10.13973/j.cnki.robot.190392Huang Yan, Li Yan, Yu Jiancheng, et al. State-of-the-art and development trends of AUV intelligence[J]. Robot, 2020, 42(2): 215-231. doi: 10.13973/j.cnki.robot.190392 [2] 陈霄, 刘忠, 董蛟, 等. 欠驱动无人艇路径跟踪控制算法[J]. 海军工程大学学报, 2018, 30(3): 108-112.Chen Xiao, Liu Zhong, Dong Jiao, et al. Path following algorithm of underactuated USV[J]. Journal of Naval University of Engineering, 2018, 30(3): 108-112. [3] Qiao S H, Fan Y S, Wang G F. Radar target tracking for unmanned surface vehicle based on square root Sage-Husa adaptive robust Kalman filter[J]. Sensors, 2022(22): 2924. [4] 饶六中, 王建华, 郭翔, 等. 基于单目视觉的无人水面艇目标跟踪方法[J]. 传感器与微系统, 2022, 41(7): 44-51.Rao Liuzhong, Wang Jianhua, Guo Xiang, et al. Monocular vision-based method for target tracking of USV[J]. Transducer and Microsystem Technologies, 2022, 41(7): 44-51. [5] 秦世洋, 张腾, 武绍宽, 等. 水上无人艇目标跟踪控制方法研究[J]. 中北大学学报(自然科学版), 2020, 41(2): 149-160.Qin Shiyang, Zhang Teng, Wu Shaokuan, et al. Target tracking of unmanned surface vehicle based on model predicitive control[J]. Journal of North University of China(Natural Scienc Edition), 2020, 41(2): 149-160. [6] 黄胜昔, 刘华. 基于加性无迹卡尔曼滤波的目标跟踪方法[J]. 计算机工程与应用, 2010, 46(8): 214-216.Huang Shengxi, Liu Hua. Method for radar target tracking based on additive sequential unscented Kalman filter[J]. Computer Engineering and Applications, 2010, 46(8): 214-216. [7] 高剑, 徐德民, 严卫生, 等. 无迹卡尔曼滤波及其在三维水下目标跟踪系统中的应用[J]. 船舶工程, 2005, 27(3): 24-28. doi: 10.3969/j.issn.1000-6982.2005.03.010Gao Jian, Xu Demin, Yan Weisheng, et al. UKF and its application to 3-D underwater target tracking system[J]. Ship Engineering, 2005, 27(3): 24-28. doi: 10.3969/j.issn.1000-6982.2005.03.010 [8] 李峰. 自主水下航行器目标跟踪方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2013. [9] 丁浩晗, 冯辉, 徐海洋. 基于自适应无迹卡尔曼滤波的动力定位状态估计[J]. 大连海事大学学报, 2016, 42(4): 8-12. doi: 10.16411/j.cnki.issn1006-7736.2016.04.002Ding Haohan, Feng Hui, Xu Haiyang. Attitude estimation of dynamic positioning system based on adaptive unscented Kalman filter[J]. Journal of Dalian Maritime University, 2016, 42(4): 8-12. doi: 10.16411/j.cnki.issn1006-7736.2016.04.002 [10] 朱齐丹, 马俊达, 刘可. 基于扰动观测器的无人水面船鲁棒轨迹跟踪[J]. 电机与控制学报, 2016, 20(12): 66-73. doi: 10.15938/j.emc.2016.12.009Zhu Qidan, Ma Junda, Liu Ke. A nonlinear disturbance observer based on robust approach to the trajectory tracking of an unmanned surface vehicle[J]. Electric Machines and Control, 2016, 20(12): 66-73. doi: 10.15938/j.emc.2016.12.009 [11] 陈烨. 近岸浅海环境下UUV的动目标跟踪方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2016. [12] 付悦文. 小型无人艇的无模型自适应跟踪方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. [13] 时晶晶. 小型自主水下航行器目标跟踪控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2012. [14] 庄佳园, 苏玉民, 廖煜雷, 等. 基于航海雷达的水面无人艇局部路径规划[J]. 上海交通大学学报, 2012, 46(9): 1372-1375. doi: 10.16183/j.cnki.jsjtu.2012.09.005Zhuang Jiayuan, Su Yumin, Liao Yulei, et al. Unmanned surface vehicle local path planning based on marine radar[J]. Journal of ShanHai Jiaotong University, 2012, 46(9): 1372-1375. doi: 10.16183/j.cnki.jsjtu.2012.09.005 [15] 周焕银, 封锡盛, 胡志强, 等. 基于多辨识模型优化切换的USV航向动态反馈控制[J]. 机器人, 2013, 35(5): 553-557.Zhou Huanyin, Feng Xisheng, Hu Zhiqiang, et al. Dynamic feedback controller based on optimized switching of multiple identification models for course control of unmanned surface vehicle[J]. Robot, 2013, 35(5): 553-557. [16] Fan Y S, Sun Y T, Wang G F. On model parameter identification and trajectory tracking control for USV based on backstepping[C]//Proceedings of the 36th Chinese Control Conference. Dalian, China: Chinese Control Conference, 2017: 4757-4761. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 527
- HTML全文浏览量: 147
- PDF下载量: 96
- 被引次数: 0

图(12)




