摘要:
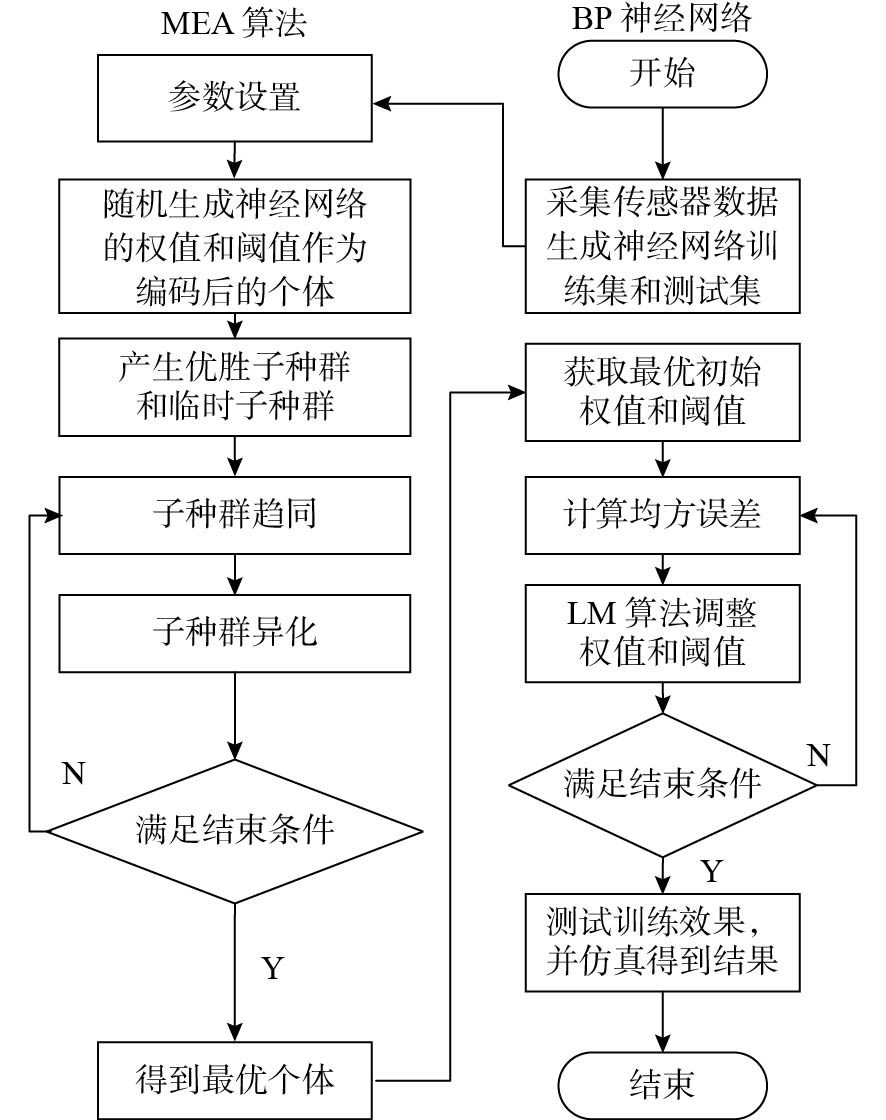
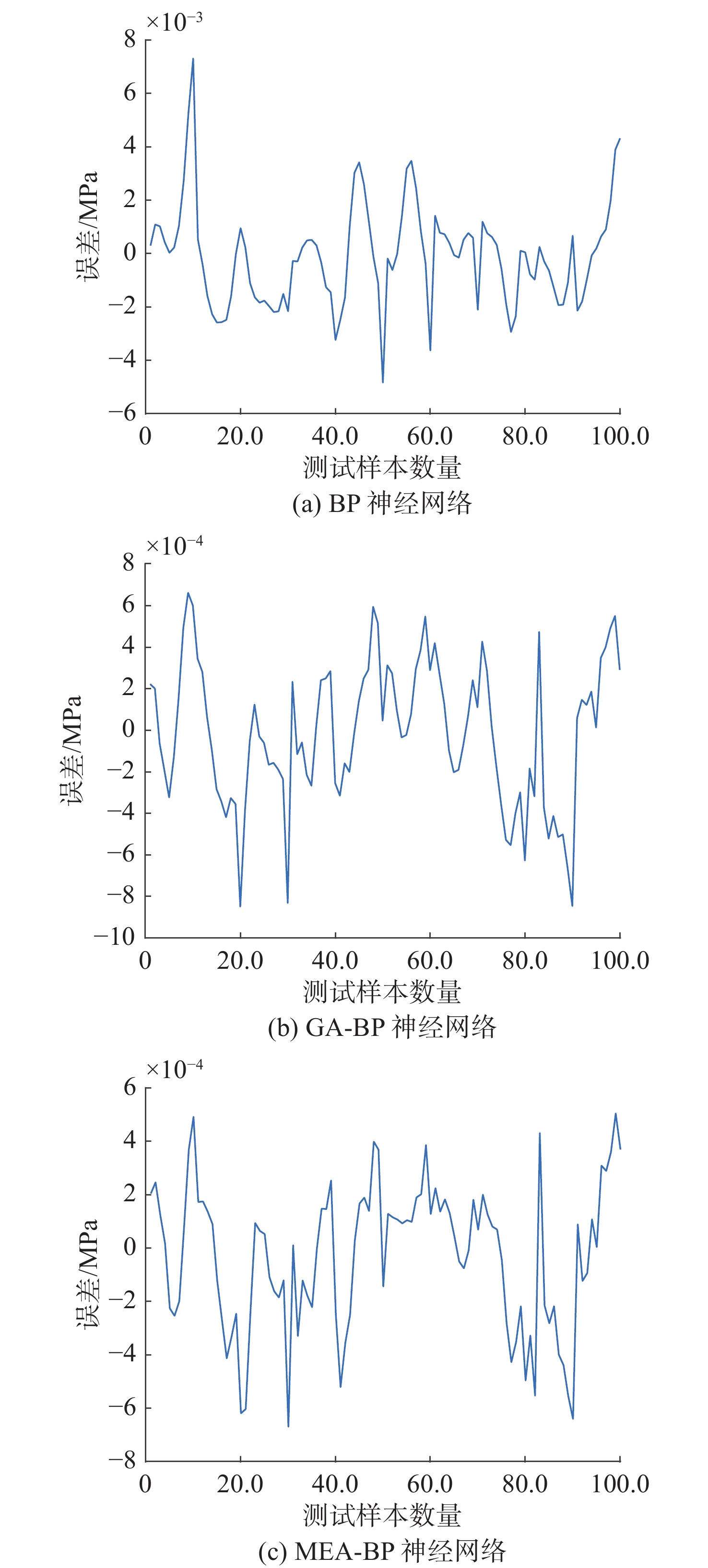
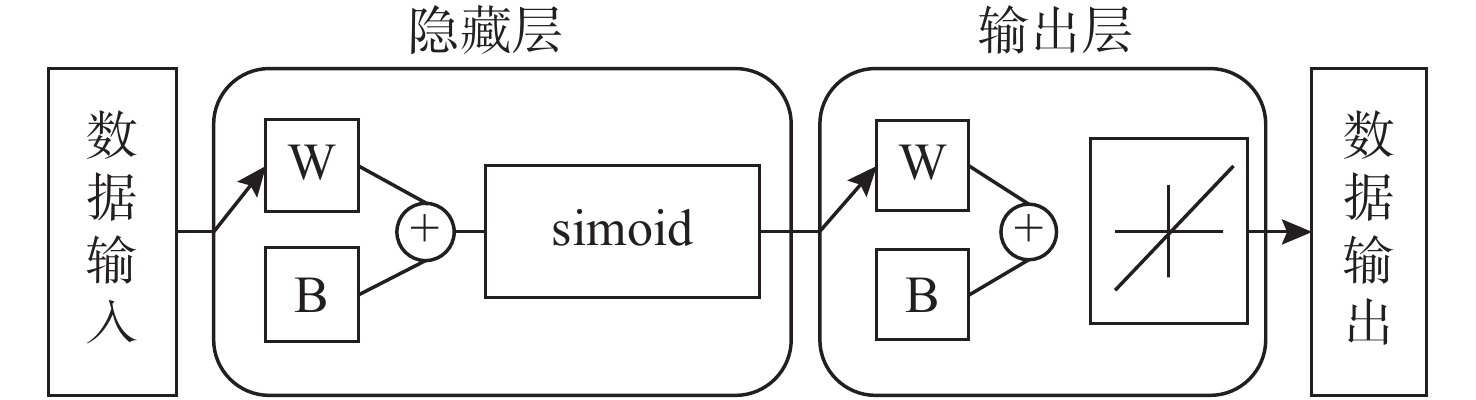
针对压阻式压力传感器对环境条件变化较为敏感, 温度变化时会产生热漂移, 影响传感器性能的不足, 文中采用思维进化(MEA)-反向传播(BP)神经网络算法对压阻式压力传感器建立误差补偿模型, 该模型利用MEA算法对神经网络的初始权值和阈值进行优化, 减少了由于初值的不确定性导致训练陷入局部最优的可能性, 并采用Levenberg-Marquardt算法代替梯度下降法加快神经网络的收敛速度, 增加补偿算法的可靠性。仿真试验结果表明, MEA-BP算法与原始BP神经网络补偿法和遗传算法-BP神经网络补偿法相比, 均方根误差期望值分别降低了48.7%和8.29%, 且标准差分别降为其他2种算法的5%和4%, 证明经过MEA算法优化的BP神经网络补偿方法能更加精确地补偿温度造成的影响, 且补偿结果更为可靠。
时豪, 范辉, 李建辰, 等. 基于MEA-BP神经网络的压力传感器误差补偿算法[J]. 水下无人系统学报, 2023, 31(2): 252-258. doi: 10.11993/j.issn.2096-3920.202205002.