摘要:
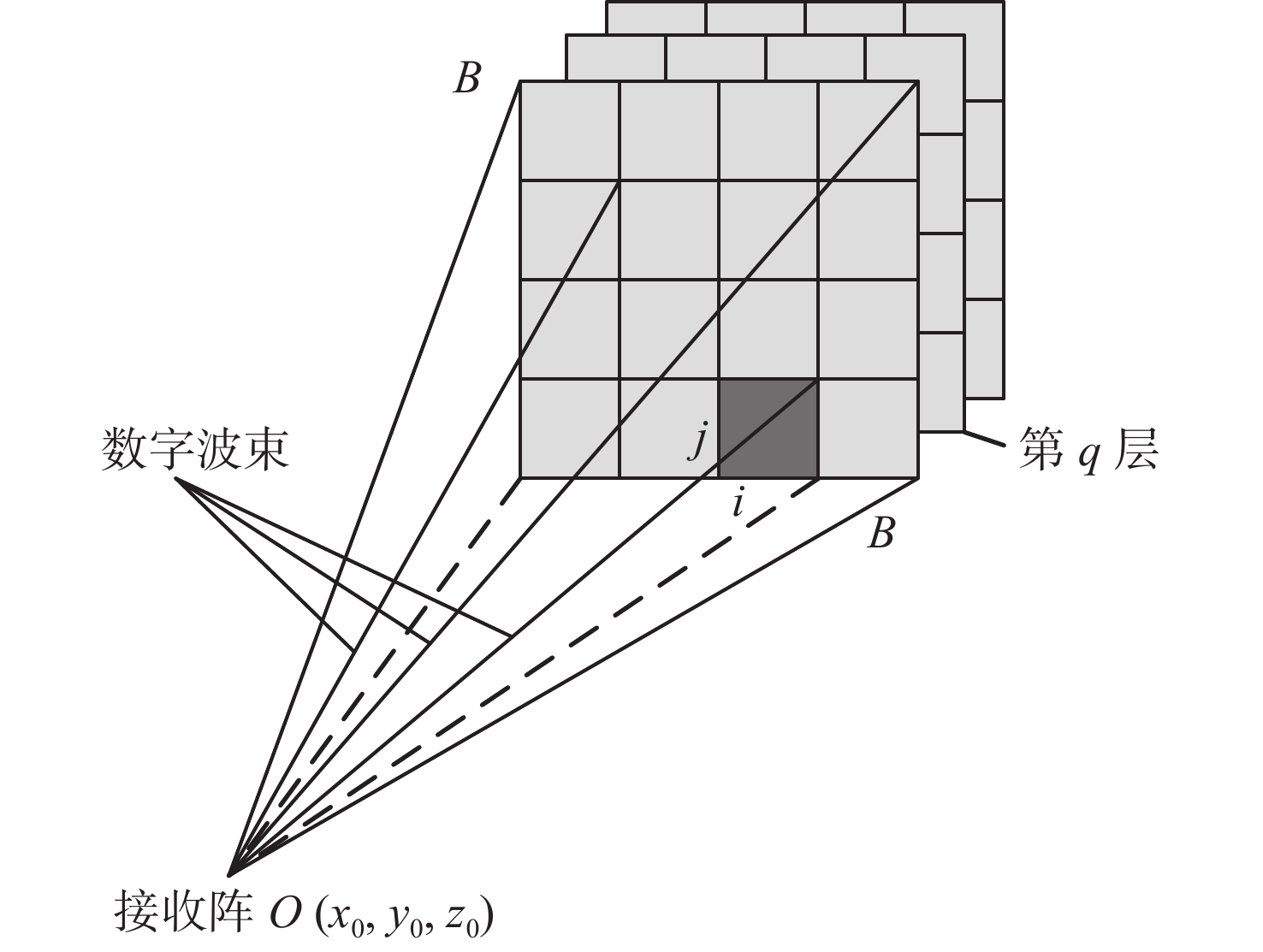
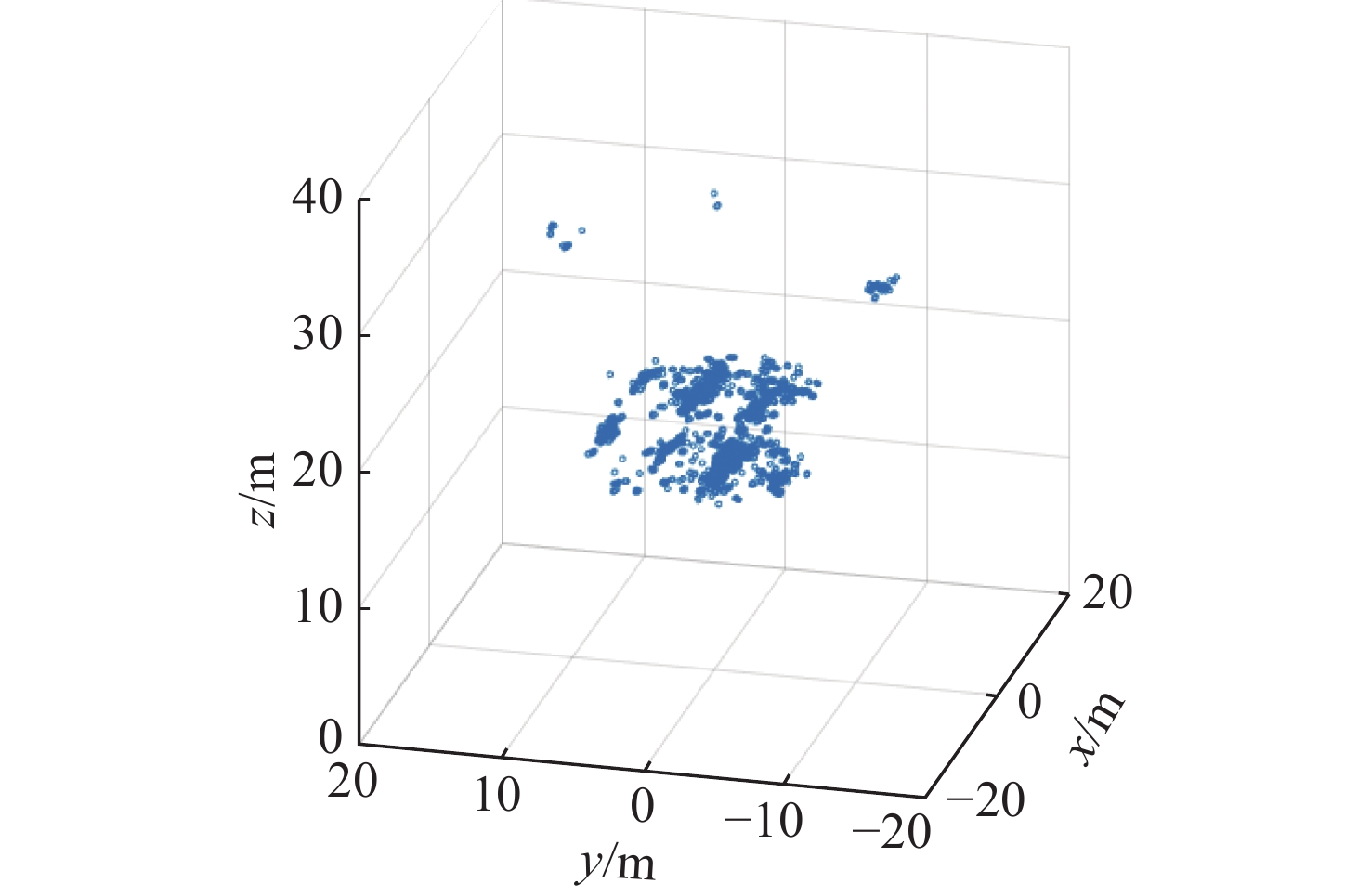
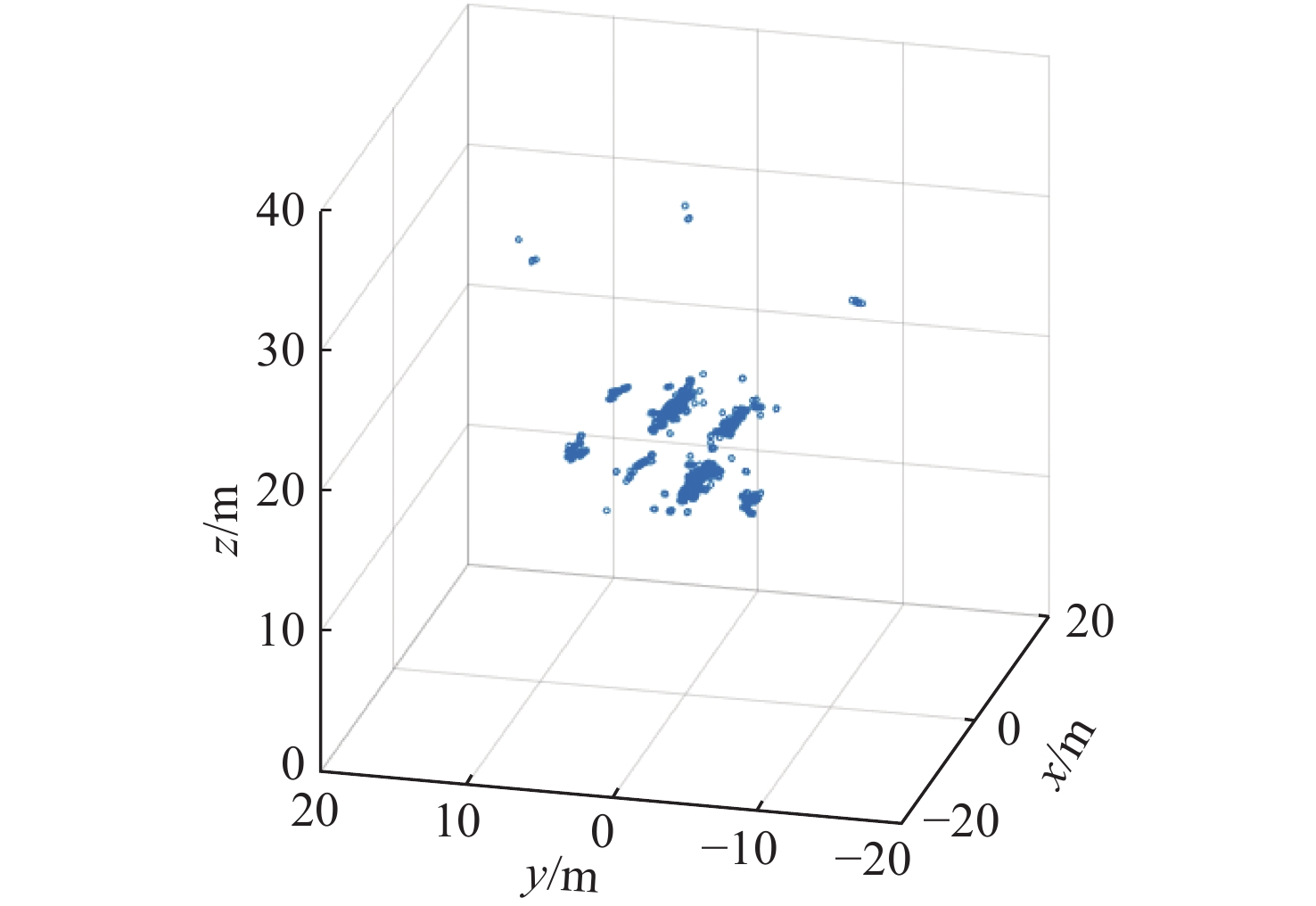
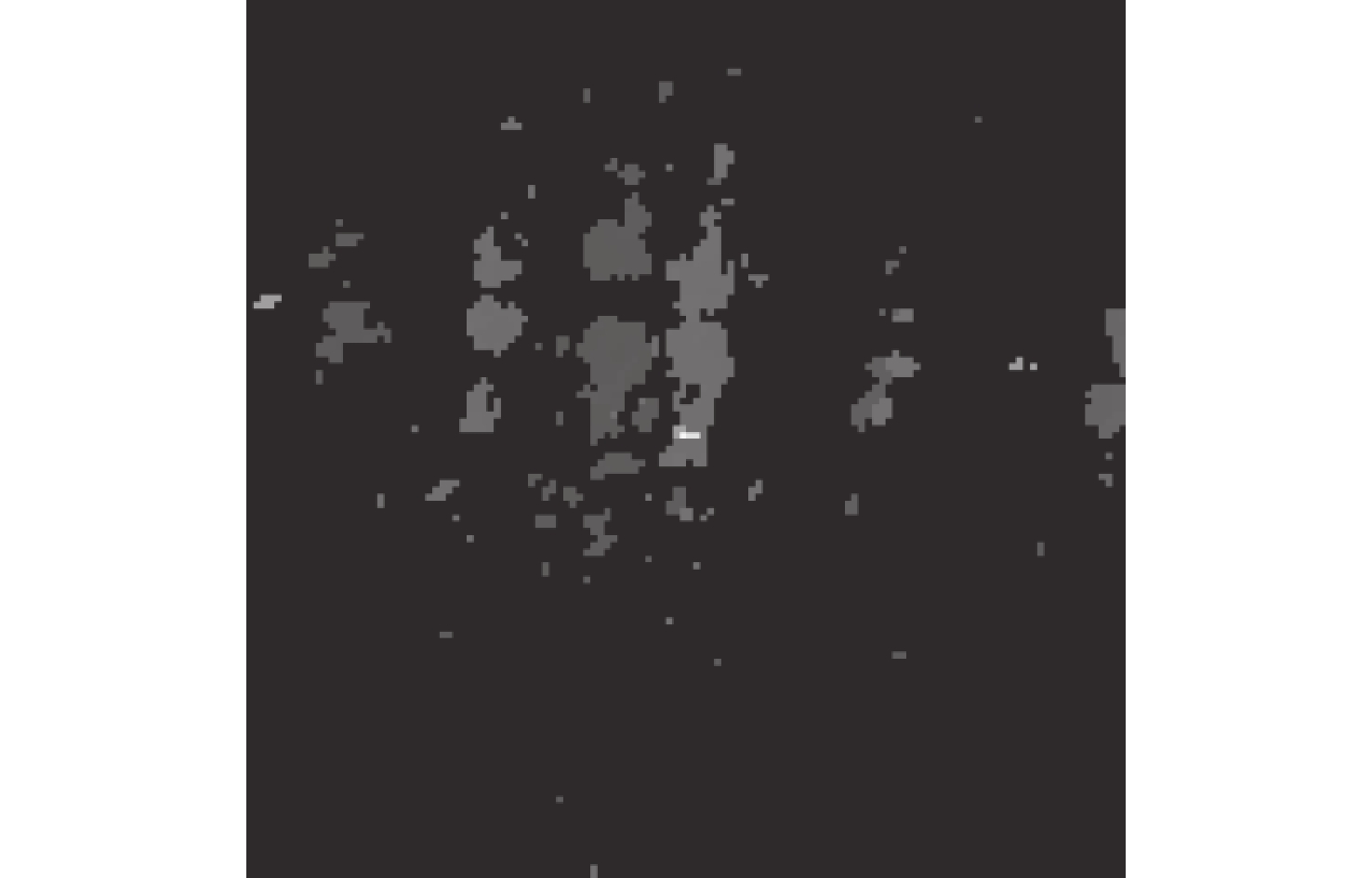
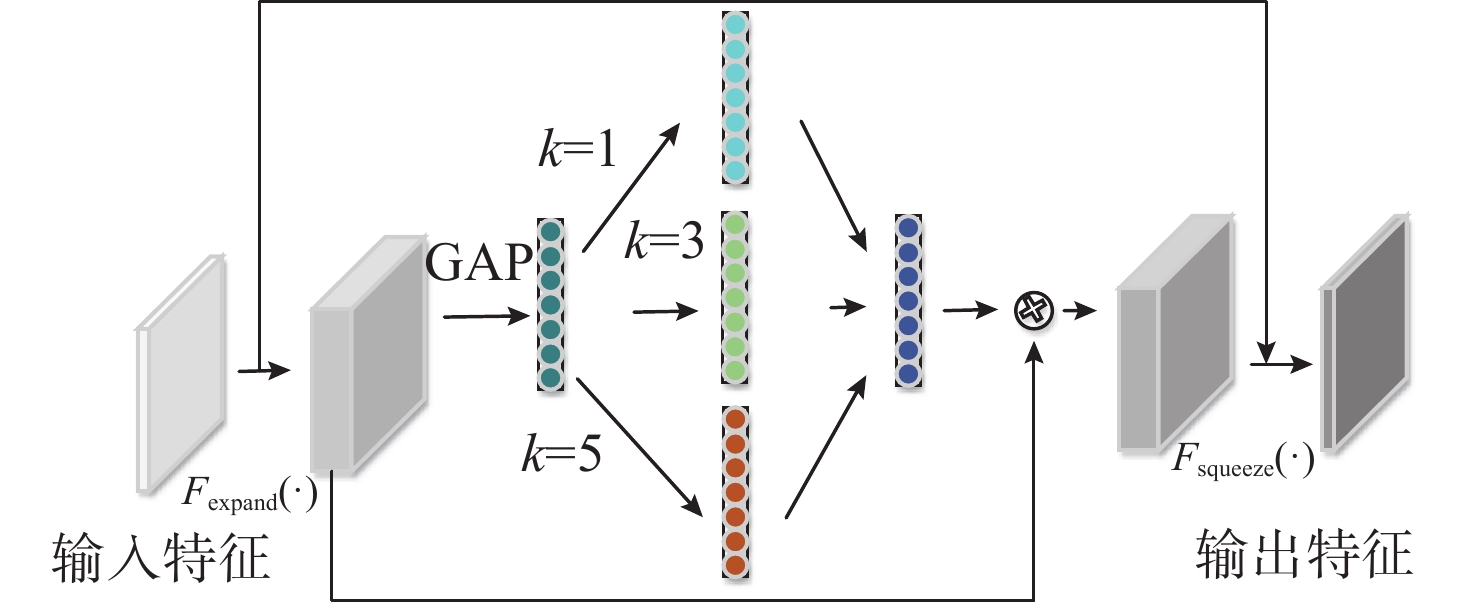
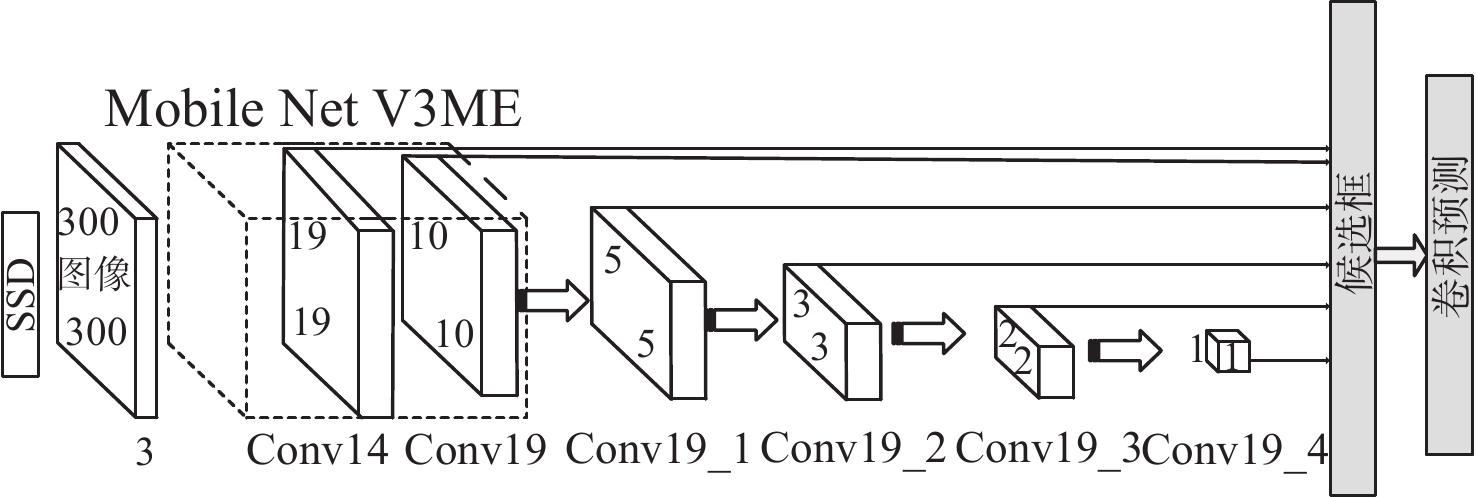
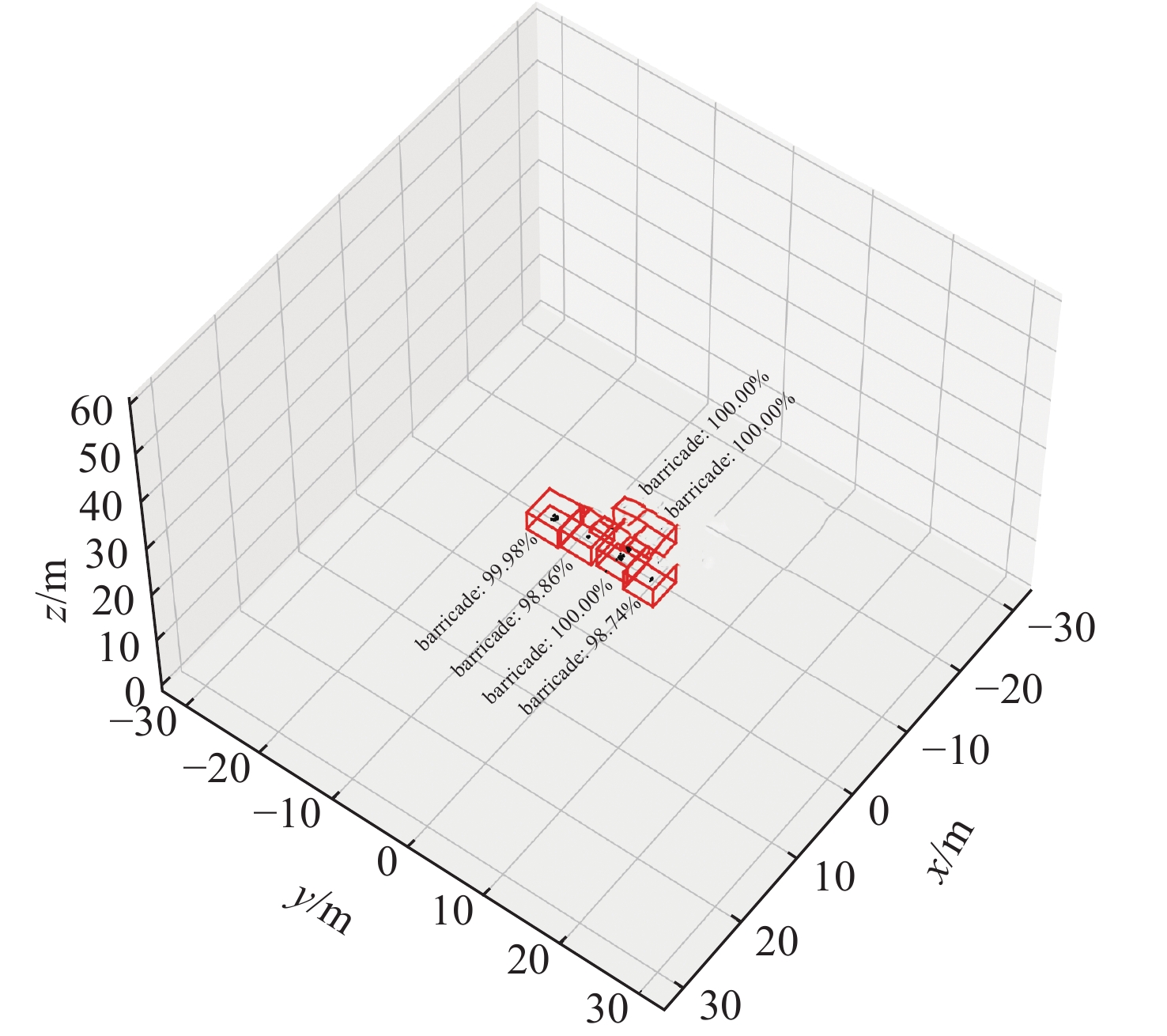
针对轨条砦目标探测和识别困难的问题, 文中利用前视三维成像声呐提高轨条砦目标探测效果, 并设计一种基于单步检测(SSD)的三维点云目标识别方法(PCSSD)。该方法首先对原始波束域数据进行阈值滤波和直通滤波处理; 接着, 对滤波后的三维点云数据进行前向投影, 并得到深度灰度图和深度伪彩图; 而后, 利用SSD目标检测模型对深度伪彩图进行检测识别; 随后, 从深度灰度图检测目标特征中计算目标的深度范围; 最后, 结合二维目标检测结果和深度范围对三维点云中的轨条砦目标进行标注。与此同时, 提出了一个基于多尺度注意力机制的特征提取模块, 并利用该模块设计了改进的目标检测模型SSD-MV3ME。在三维点云轨条砦目标检测数据集GTZ上, SSD-MV3ME在检测时间基本相等的条件下, 检测精度比轻量化目标检测模型SSD-MV3提升1.05%, 模型参数减少2 482 KB。实验结果表明, 基于SSD-MV3ME的PCSSD更适合轨条砦目标识别任务。
李宝奇, 任露露, 陈发, 等. 基于前视三维声呐的轨条砦识别方法[J]. 水下无人系统学报, 2022, 30(6): 747-753. doi: 10.11993/j.issn.2096-3920.2022-0016.