Abstract:
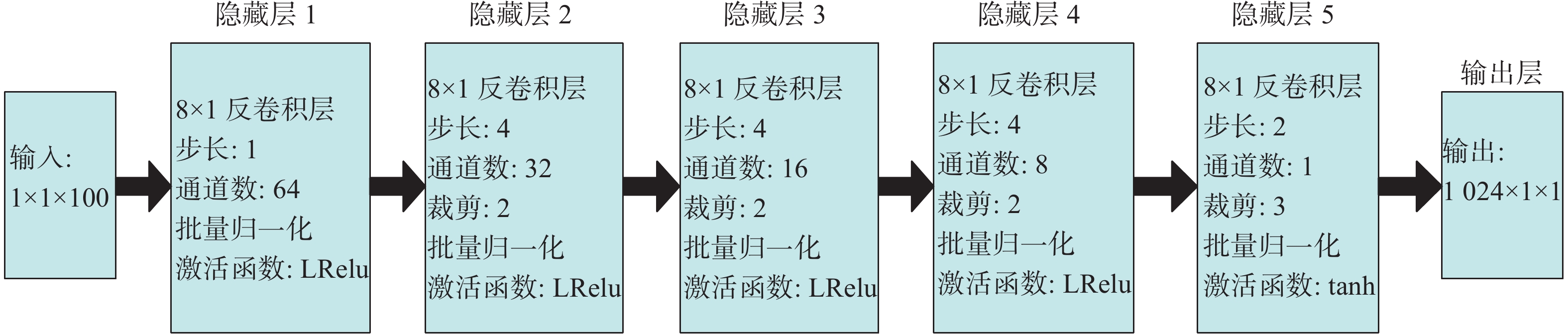
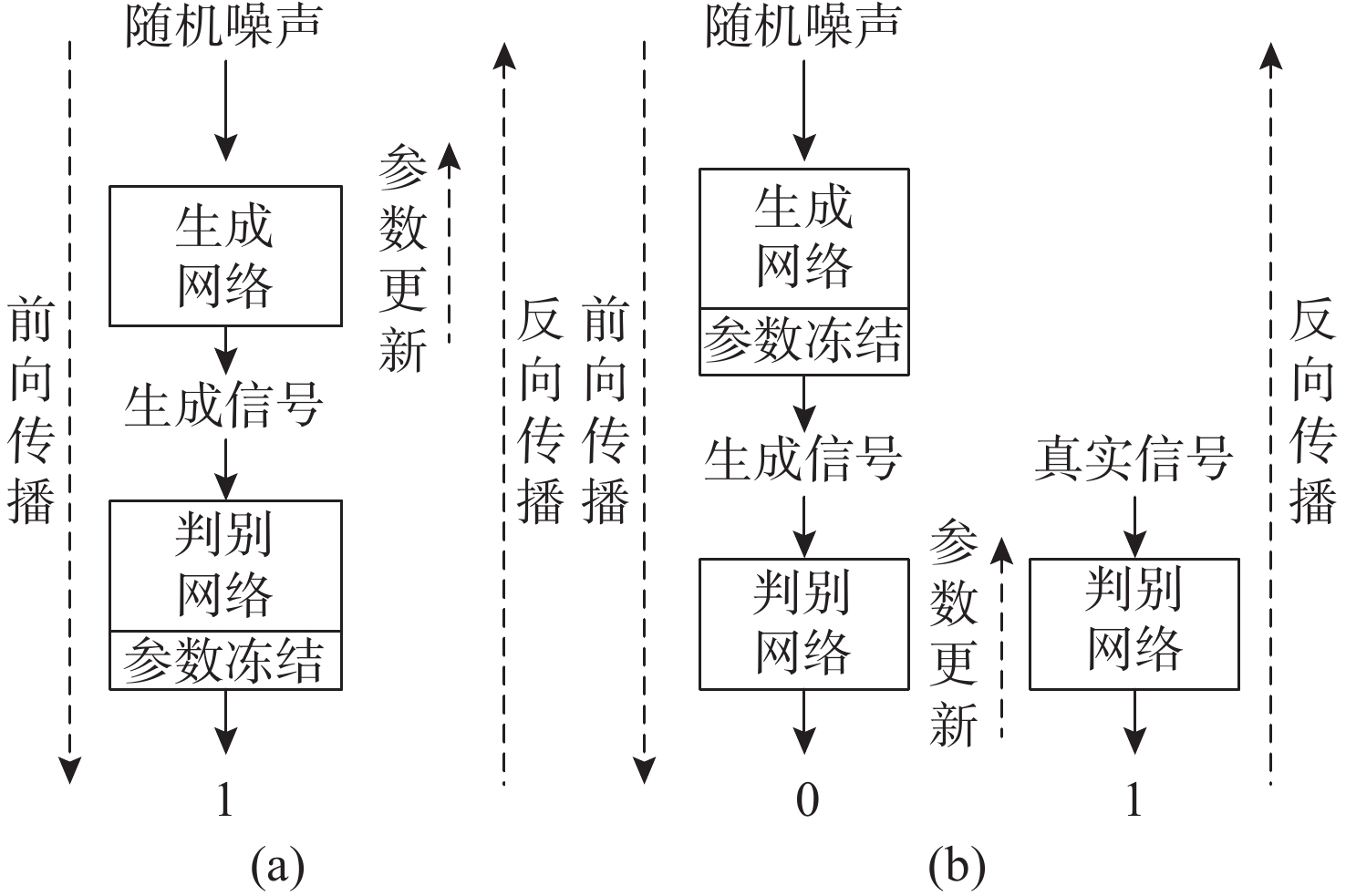
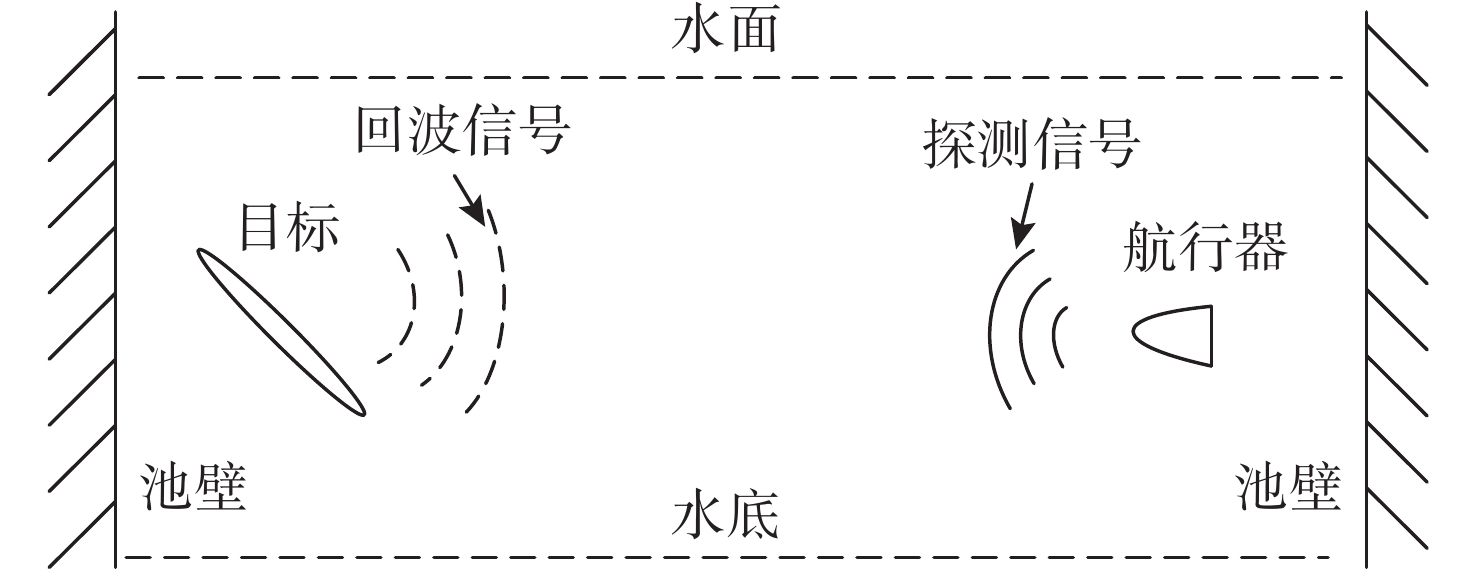
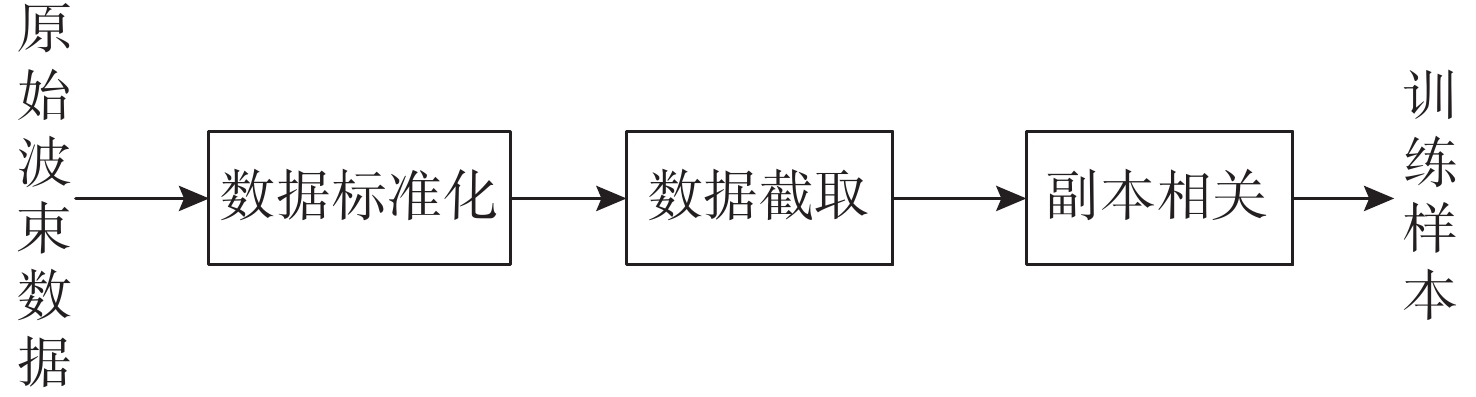
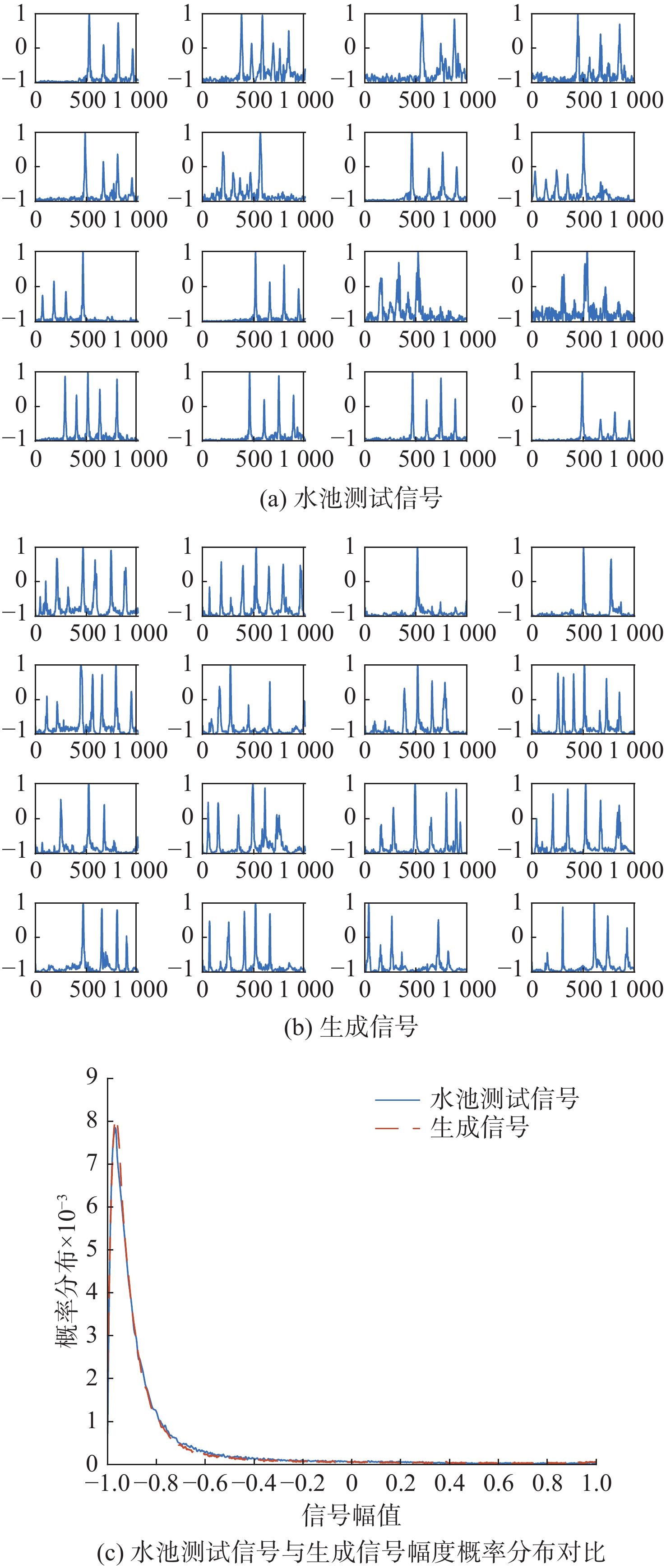
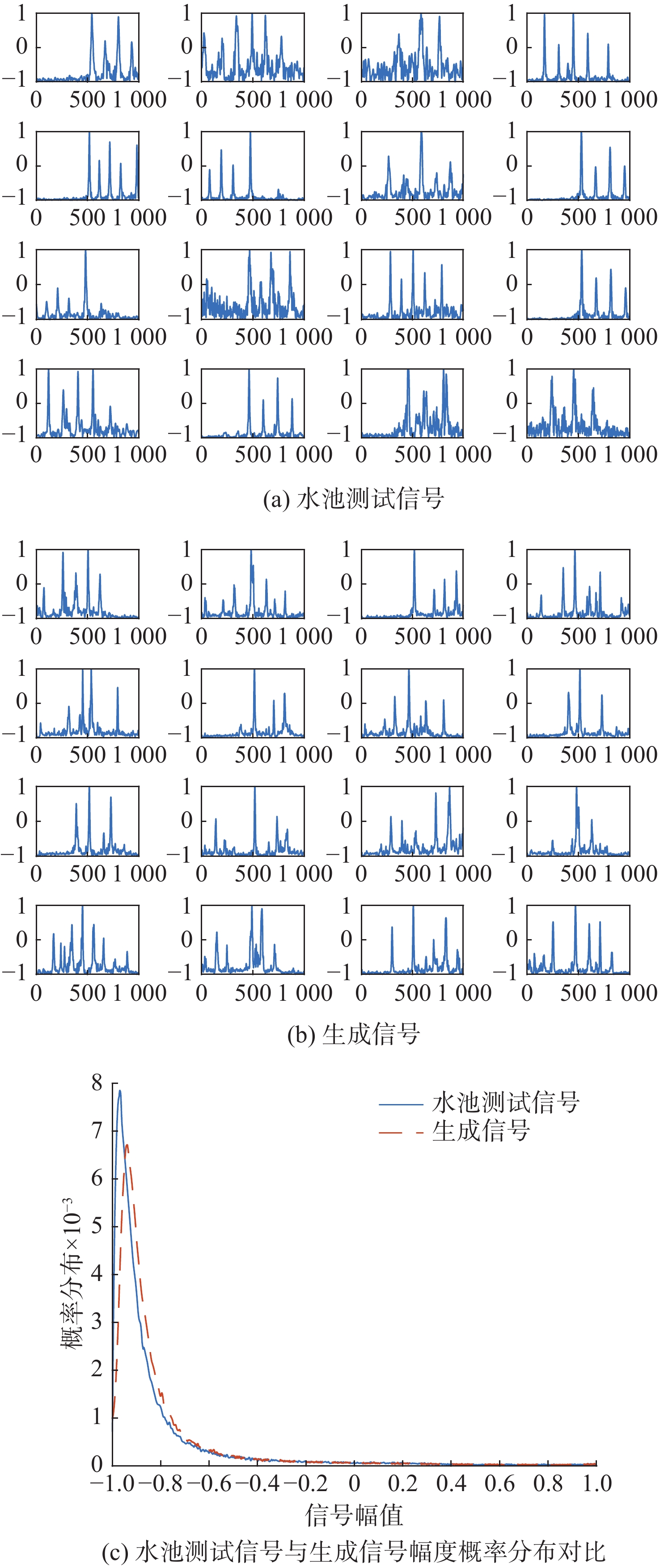
Under the tide led by artificial intelligence, the application of deep learning methods in underwater target recognition has gained increasing attention. However, obtaining underwater sample data from actual scientific research is extremely difficult because of environmental constraints, time, cost, and other factors. An insufficient number of samples leads to poor training effects in deep learning models. Generative adversarial networks(GAN), a new artificial intelligence technology, have a wide range of applications in data enhancement, image generation, and other fields. However, the traditional GAN model is unsuitable for underwater echo samples and cannot be used directly for sample data generation. Therefore, this study proposed an underwater echo signal generation method based on an improved GAN for a small sample to address the problem of insufficient underwater target data. Combining the characteristics of the echo signal, the study designed and built a convolution unit-based GAN model. Furthermore, an echo signal generation simulation experiment was carried out using the pool experimental test data. Finally, the effectiveness of the generated signal was verified at the level of the signal waveform and amplitude probability distribution. The experimental results show that the improved GAN model proposed in this study is suitable for generating highly realistic original echo signals in the case of small samples, which provides a new idea for the active detection and recognition of underwater targets.



 Taobao
Taobao
 Micro
Micro